综述 齿轮系统动力学的理论体系_王建军
基于能量解析法的多轴系齿轮传动系统动力学模型的建立
基于能量解析法的多轴系齿轮传动系统动力学模型的建立袁勇超;王自玲;刘忠明;毛继哲;张坤【摘要】基于能量解析法给出了转子-轴承-齿轮传动系统的动力学方程.并建立了耦合转子动力学系统的模型.建模过程中考虑了转子轴的剪切、弯曲、扭转、轴向力、陀螺效应及内阻尼的影响,考虑了不同形式的轴承即动压油膜轴承和滚动轴承的影响,同时也考虑了齿轮副的时变啮合刚度和传动误差的影响.为进一步的动力学特性分析提供了精确的模型.【期刊名称】《机械研究与应用》【年(卷),期】2019(032)004【总页数】9页(P33-40,43)【关键词】能量法;多轴系;齿轮传动;动力学模型【作者】袁勇超;王自玲;刘忠明;毛继哲;张坤【作者单位】郑州机械研究所有限公司,河南郑州 450052;河南省体育局,河南郑州 450044;郑州机械研究所有限公司,河南郑州 450052;郑州机械研究所有限公司,河南郑州 450052;郑州机械研究所有限公司,河南郑州 450052【正文语种】中文【中图分类】TH1320 引言齿轮转子系统的动力学模型一般包括传动轴、轴承支撑及轮盘部分,即常说的转子-轴承-齿轮动力学系统,这是一个非线性动力系统。
如果某些参数设计不合理,在运转工况下可能会出现异常振动和噪声,这会严重影响传动系统的可靠性及整个机组的运行品质[1]。
所以,对此齿轮耦合转子系统非线性动力学模型的建立和动力学特性研究具有重要的工程实际意义。
充分考虑了转子-轴承-齿轮动力学系统的实际应用性,应用能量数值解析法建立了耦合转子系统的动力学模型,并编写了实际应用程序,为下一步对耦合转子系统非线性动力学特性的研究和分析做出了充分的准备工作。
1 柔性轴段的动力学矩阵在高速转子系统中,轴可以设计为刚性轴,但由于空间或其他因素如轴承的要求,轴必须设计为柔性轴的几率很大,故笔者主要考虑了柔性轴的动力学分析。
将转子轴划分为若干个轴段,每个轴段单元采用两节点Euler轴单元模型。
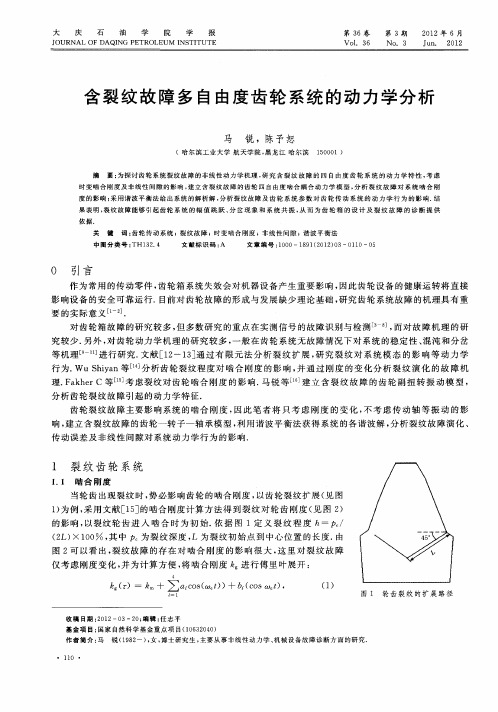
含裂纹故障多自由度齿轮系统的动力学分析
尼 ; () 为齿侧 间 隙非 线性 描述 函数 , 以拟合 为 ( =y - y 其 中 为非 线性 间 隙系数 . 可 ) q n 。" ,
式(1;o2fo一—k(.’ 中=2——7=;gI klf :()臣m2=2] ;主 l lm]/ C rb] r M:g; 0 g^2 ) L c cl )一; ; 0 ]I m o『 g 2 I g L F g0 K 0 厂3 — I
謦
第 3期
马
锐 等: 含裂 纹 故 障 多 自由度 齿 轮 系统 的动 力 学 分 析
式 中 : 为啮合 频 率 , 一Z , z 为齿 数 , 为 恒定 角速度 ; b 为谐波 系数 . ∞ ( 一2 u 2 z ,2 2 ∞, 口 ,
转 角 / 。) ( ()裂纹 2 %时 a 0
依据.
关
键
词 : 轮 传 动 系 统 ;裂纹 故 障 ;时 变 啮合 刚度 ;非 线 性 间 隙 ; 波 平 衡 法 齿 谐 文献标识码 : A 文 章 编 号 :0 0—1 9 (0 20 —0 1 0 10 8 1 2 1 ) 3 1 0— 5
中图分类号: TH1 24 3 .
0 引 言
式 中 : c c y Hr= 姐 z ; 一 M
.一 , J。l一 ;生 c ; F 号 m 。 一
.
m
选定 6作 为标 称尺度 , 设新 的 时 间尺度 一 r ∞ 一 r( 为无 故 障单齿 啮合 的平均 刚度 ) 将 方程 并 。 , 5 / k e . ,
大
庆
石
油
转 角 / 。) ( ()裂纹 5 %时 b O
转角 / ) ( ()裂纹 7 %时 C O
图 2 齿 轮 啮 合 刚度 随 裂 纹 的 变化
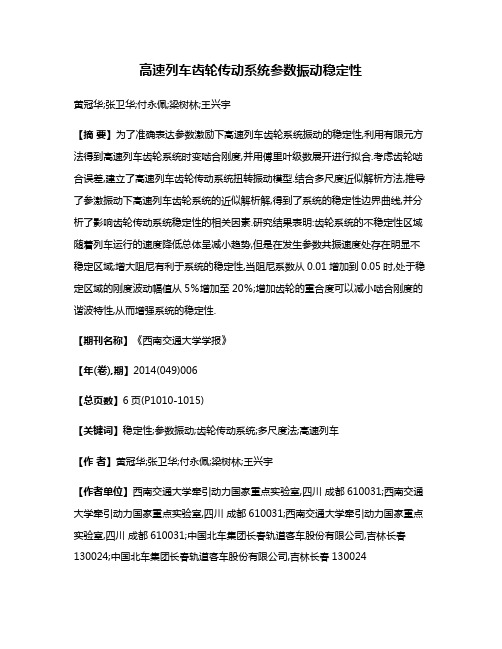
高速列车齿轮传动系统参数振动稳定性
高速列车齿轮传动系统参数振动稳定性黄冠华;张卫华;付永佩;梁树林;王兴宇【摘要】为了准确表达参数激励下高速列车齿轮系统振动的稳定性,利用有限元方法得到高速列车齿轮系统时变啮合刚度,并用傅里叶级数展开进行拟合.考虑齿轮啮合误差,建立了高速列车齿轮传动系统扭转振动模型.结合多尺度近似解析方法,推导了参激振动下高速列车齿轮系统的近似解析解,得到了系统的稳定性边界曲线,并分析了影响齿轮传动系统稳定性的相关因素.研究结果表明:齿轮系统的不稳定性区域随着列车运行的速度降低总体呈减小趋势,但是在发生参数共振速度处存在明显不稳定区域;增大阻尼有利于系统的稳定性,当阻尼系数从0.01增加到0.05时,处于稳定区域的刚度波动幅值从5%增加至20%;增加齿轮的重合度可以减小啮合刚度的谐波特性,从而增强系统的稳定性.【期刊名称】《西南交通大学学报》【年(卷),期】2014(049)006【总页数】6页(P1010-1015)【关键词】稳定性;参数振动;齿轮传动系统;多尺度法;高速列车【作者】黄冠华;张卫华;付永佩;梁树林;王兴宇【作者单位】西南交通大学牵引动力国家重点实验室,四川成都610031;西南交通大学牵引动力国家重点实验室,四川成都610031;西南交通大学牵引动力国家重点实验室,四川成都610031;中国北车集团长春轨道客车股份有限公司,吉林长春130024;中国北车集团长春轨道客车股份有限公司,吉林长春130024【正文语种】中文【中图分类】U270.1高速列车传动系统一般为齿轮传动系统,从动轮直接压装在车轴上,主动轮采用联轴节与牵引电机相连,通过齿轮箱悬吊在构架横梁上[1]. 因此,齿轮系统的振动特性将直接影响着高速列车驱动传动系统的运行性能. 在齿轮传动中,由于参与啮合的轮齿对数的周期变化,使得齿轮轮齿的综合啮合刚度也是周期变化的,所以在动力学模型中体现为周期性时变的弹性刚度. 考虑这种因素后,齿轮动力学问题在力学上是参数振动问题,其分析的模型是参数振动方程[2].齿轮系统是一种参数振动系统,判定系统稳定性以及影响稳定性的因素是首要问题,众多齿轮方面的学者在这方面做了大量工作. 文献[3-5]中利用数值方法分析了单自由度齿轮系统的稳定性和稳态响应,模型将齿轮啮合刚度假设为矩形波和正弦波,揭示了齿轮系统的谐波共振、概周期响应和混沌响应.文献[6-7]中利用直接积分算法对多自由度齿轮系统的稳定性进行了研究,并探讨了通向混沌的双周期分岔途径. 文献[8-10]中运用Floquet 理论对稳定性尤其是参数稳定性方面也有较多的研究[8-10].上述研究主要集中在一般机械领域,针对铁路车辆,尤其是高速列车传动系统的研究较少.高速列车齿轮传动系统动态响应较为复杂,在特定频率激励往往出现超谐共振、亚谐共振等多种参数共振形式,对齿轮传动系统的服役将产生不利影响,严重的会导致系统的共振失效. 为了准确表达参数激励下的高速列车齿轮系统振动稳定性,本文针对某型高速动车组齿轮传动系统,采用多尺度解析方法对齿轮系统方程作近似展开,得到系统稳定区的近似解析解,给出动力稳定性图谱,并从系统稳定性角度提出了高速列车齿轮传动系统参数选取建议.1 齿轮啮合动力学模型1.1 动力学方程当忽略传动轴和支撑系统的弹性变形时,可将高速列车齿轮传动系统简化处理为齿轮副的扭转振动系统,如图1 所示,图中:θp、θg 为主、被动齿轮的扭转振动角位移;Ip、Ig 为主、被动齿轮的转动惯量;Rp、Rg 为主、被动齿轮的基圆半径;i 为传动比;e(t)为轮齿啮合传递误差;km 为啮合综合刚度;cm 为啮合阻尼;Tp、Tg 为作用在主、被动齿轮上的外载荷力矩.动力学方程可表示为[11]图1 齿轮动力学模型Fig.1 Dynamic model of a gear pair为了消除系统刚性位移,定义系统动态传递误差和静态传递误差的差值为将式(1)、(2)相减,得到单自由度系统的动力学方程为式中:me 为当量质量,II1.2 齿轮啮合刚度和传递误差齿轮啮合刚度的获取方法有很多种,通常先计算出啮合刚度的峰值和平均值,然后按啮合频率将啮合刚度简化成矩形波周期函数,略去高阶项后再将其展开成傅里叶级数[12],即式中:Ks 为平均刚度;Kj 为刚度波动幅值;j 为刚度有限谐波项数;φj 为相位角;ωe 为齿轮副的啮合圆周频率,ωe =2πZ1n1/60 =2πZ2n2/60,其中,Z1、Z2 分别为主、被动轮的齿数,n1、n2 分别为主、被动轮的转速.上述方法简单易用,但是对于轮齿刚度的时变表达不够精确.事实上,轮齿综合啮合刚度定义为使一对或几对同时啮合的轮齿在1 mm 齿宽上产生1 μm 挠度所需的载荷[13]. 根据这一定义,建立高速列车轮齿三维实体接触有限元模型,本文建立的齿轮传动的轮齿接触有限元模型如图2 所示.图2 轮齿接触的三维有限元模型Fig.2 3D finite element model of gear pair contact在可能接触区域部分进行网格加密,得到的模型共有68 460 个单元,86 750 个节点.将主动轮和被动轮的齿面定义为接触对,在齿轮轴线上建立参考点,并在参考点和大小齿轮内圈和剖面间建立耦合约束,将转矩载荷、约束施加在主动轮和被动轮的参考点上.计算随时间变化的啮合轮齿之间弹性变形和受力,得到齿轮啮合刚度,并采用傅里叶级数对时变刚度进行拟合.图3 为小齿轮在4 200 r/min 转速下,采用有限元方法和傅里叶级数拟合的齿轮时变啮合刚度曲线.轮齿啮合误差通常采用齿轮啮合频率的傅里叶级数表示[12],即式中:e0、ej 分别为齿轮误差的常数和幅值;θj 为相位角.1.3 运动方程的无量纲化将式(4)、(5)代入式(3),令x =bu(b 为特征尺寸),对其进行无量纲化,可得式中:K1 =Kj/Ks;、分别为对τ 的一阶和二阶导数,其中,τ=ω0t,图3 时变啮合刚度曲线Fig.3 Time-varying curve of mesh stiffness2 稳定性分析引入小参数ε,则有:式(6)的齐次形式可表示为使用多尺度法[14],讨论式(7)的一次近似解.设零次近似方程的解为式中:T0、T1、Ti 为多尺度法的时间变量;A 为待定的复函数.一次近似方程表示为式中:cc 为前面各项的共轭复数.当趋近于2/j(j=1,2,…)时,引入频率谐参数σ,设将式(10)代入到式(9)中,消除久期项,得设分离实部和虚部,得式中:其中,b1、b2 为常数,λ 为特征值.特征方程为由式(13)可知,当λ 具有正实部时,系统不稳定,由此可得系统稳定性边界的临界曲线方程为3 实例分析根据上述结果,对某型高速列车齿轮系统的稳定性进行分析.齿轮副的相关参数如表1 所示.表1 齿轮副参数Tab.1 Parameters of gear couples名称数值模数/mm6齿数Z1 =35,Z2 =85齿宽/mm65中心距/mm380压力角/(°)20传动比2.428当量质量8.26图4(a)为不考虑啮合阻尼,展开项数j 取1 ~6 项时,系统在kj-平面上的稳定性图谱,V 形区域内为不稳定区域(以下同).从图4(a)可以看出,随着项数j 的增大,啮合刚度的谐波特性会降低,系统的不稳定性区逐渐减小;在啮合刚度不变时,随着参数激励的减小,不稳定区域也会减小,出现不稳定区域的重叠.图4(b)为相应的速度稳定性图谱.从图4(b)可以看出,齿轮啮合频率随着列车运行速度的降低而减小,不稳定的区域总体呈减小趋势,但在发生参激振动的转速时,不稳定的区域明显更大,在实际运行中应引起注意.图4 齿轮系统稳定性Fig.4 Stability of gear system图5 为阻尼系数对稳定性的影响.从图5 中可以看出,系统阻尼对稳定性有较大的影响,阻尼可以减小系统的不稳定区域,改善系统的动态特性.当阻尼系数从0.01 增加到0.05 时,处于稳定区域的刚度波动幅值从5%增加至20%.从以上分析可以看出,可以通过以下途径增加高速列车齿轮传动系统稳定性:降低啮合谐波刚度比值、合理选取系统的参激频率(啮合频率与固有频率的匹配)以及增大轮齿的啮合阻尼.在实际的设计过程中,首先应该保证列车常用的运行速度避开固有频率与啮合频率容易发生参激共振时的转速(从图4(b)看应尽量避免240km/h 的常速行驶),增大啮合阻尼主要依靠材料的选取或采用附加阻尼的方式,降低啮合谐波刚度比值可以通过增大齿轮的啮合重合度.式(15)是端面重合度与啮合刚度均值的表达式[15],式中:εα 为端面重合度;c'为单对齿刚度.图6 为端面重合度分别取1.2 和1.9 时,采用数值直接积分对式(6)进行求解得到的位移随时间变化图,从图中可以看出,当端面重合度分别取1.2 和1.9 时,系统趋于不稳定和稳定,这也是高速列车齿轮系统参数设计中普遍采用高重合度的原因. 图5 不同阻尼下齿轮系统参数振动稳定性Fig.5 Parametric vibration stability of gear system with different dampings图6 不同端面重合度系统时间历程图Fig.6 Dynamic response time history of gear system with different transverse contact ratios4 结论本文从理论上分析了高速列车齿轮系统在参数时变啮合刚度下的稳定性问题,通过对时变啮合刚度的傅里叶展开,运用非线性多尺度近似解析方法得到了齿轮系统的稳定性图谱,从系统稳定性的角度得到了齿轮设计时应考虑参激频率、刚度的谐波特性以及啮合阻尼三方面因素,主要结论如下:(1)齿轮系统的不稳定性区域随着列车运行的速度降低总体呈减小趋势,但是在参激频率处存在明显不稳定区域,应根据系统的固有频率合理地制定运营速度. (2)系统的阻尼比和啮合刚度的谐波分量对系统的稳定性影响较大.增大阻尼有利于系统的稳定性,通过增加齿轮啮合的重合度可以减小啮合刚度的谐波特性,从而减小系统的不稳定区域,当端面重合度从1.2 增加到1.9,对系统直接数值积分也验证了这一结果.(3)文中从稳定性的角度分析了齿轮啮合引起的参数振动,分析模型可为高速列车驱动传动系统动力学等研究提供借鉴.参考文献:【相关文献】[1]张卫华. 动车组总体与转向架[M]. 北京:中国铁道出版社,2011:197-204.[2]王建军,洪涛,吴仁智,等. 齿轮系统参数振动问题研究综述[J]. 振动与冲击,1997,16(4):69-73.WANG Jianjun,HONG Tao,WU Renzhi,et al.Researches on parametric vibration of gear transmission systems-review[J]. Journal of Vibration and Shock,1997,16(4):69-73.[3] BENTON M,SEIREG A. Factors influencing instability and resonance in geared systems[J]. ASME Journal of Mechanical Design,1981,103:372-378.[4] KAHRAMAN A,SINGH R. Interactions between timevarying mesh stiffness and clearance non-linearities in a geared systems[J]. ASME Journal of Sound and Vibration,1991,146(1):135-156.[5] KAHRAMAN A. Effect of axial vibrations on the dynamics of a helical gear pair[J]. Journal of Sound and Acoustics,1993,115(1):33-39.[6] RAGHOTHAMA A,NARAYANAN S. Bifurcation and chaos in geared rotor bearing system by incremental harmonic balance method[J]. Journal of Sound and Vibration,1999,226(3):469-492.[7] SEYRANIAN A P,SOLEM F,PEDEREEN P. Multiparameter linear periodic systems:sensitivity analysis and applications[J]. Journal of Sound and Vibration,2000,229(1):89-111.[8]李同杰,朱如鹏,鲍和云,等. 行星齿轮传动非线性振动系统参数稳定域的计算方法[J].航空动力学报,2012,27(6):1416-1423.LI Tongjie,ZHU Rupeng,BAO Heyun,et al. Method of stability region determination for planetary gear train's parameters based on nonlinear vibration model[J].Journal of Aerospace Power,2012,27(6):1416-1423. [9]周丽杰,王能建,张德福. 舰载直升机甲板牵引系统运动稳定性分析[J]. 西南交通大学学报,2011,46(3):409-414.ZHOU Lijie,WANG Nengjian,ZHANG Defu. Motion stabilityanalysis of carrier helicopter traction system on deck[J]. Journal of Southwest Jiaotong University,2011,46(3):409-414.[10]王延忠,周元子,李国权,等. 螺旋锥齿轮啮合刚度及参数振动稳定性研究[J]. 航空动力学报,2010,25(7):1664-1669.WANG Yanzhong,ZHOU Yuanzi,LI Guoquan,et al.Mesh stiffness function and stability analysis for parametric vibration of spiral bevel gears[J]. Journal of Aerospace Power,2010,25(7):1664-1669.[11]李润方,王建军. 齿轮系统动力学[M]. 北京:科学出版社,1997:154-162.[12] AMABILI M,RIVOLA A. Dynamic analysis of spur gear pairs:steady-state response and stability of the SDOF model with time-varying meshing damping[J].Mechanical Systems and Signal Processing,1997,11(3):375-390.[13] SENEY S. Torsional properties of spur gears in mesh using nonlinear finite element analysis[D]. Perth:Curtin University of Technology,1999.[14]刘延柱,陈立群. 非线性振动[M]. 北京:高等教育出版社,2001:83-86.[15]国家技术监督局. GB/T3480—1997 渐开线圆柱齿轮承载能力计算方法[S]. 北京:中国标准出版社,1997.。
齿轮机械传动动力学研究文献综述完整版

基于齿轮传动的机械动力学研究文献综述摘要:本文结合相关文献对机械动力学中齿轮传动动力学部分的研究进行了综述。
综合文献对齿轮传动动力学研究现状和发展趋势有了整体把握。
关键词:动力学;齿轮传动;综述;The Literature Review of Mechanical Dynamics based on gear transmissionAbstract:In this paper, the studies of mechanical dynamics of gear transmission were reviewed. On the whole, we grasp the studies status anddevelopment trend of gear transmission.Keywords: Dynamics;Gear transmission;Review1.前言随着机械向高效、高速、精密、多功能方向发展,对传动机械的功能和性能的要求也越来越高,机械的工作性能、使用寿命、能源消耗、振动噪声等在很大程度上取决于传动系统的性能。
因此必须重视对传动系统的研究。
机械系统中的传动主要分为机械传动、流体传动(液压传动、液力传动、气压传动、液体粘性传动和高等优点机械传动的形式也有多种,如各种齿轮传动、带(链)传动、摩擦传动等。
齿轮传动是机械传动中的主要形式之一。
在机械传动中占有主导地位。
由于它具有速比范围大、功率范围广、结构紧凑可靠等优点,已广泛应用于各种机械设备和仪器仪表中。
成为现有机械产品中所占比重最大的一种传动。
齿轮从发明到现在经历了无数次更新换代,主要向高速、重载、平稳性、体积小、低噪等方向发展。
2. 齿轮动力学的发展概述齿轮的发展要追溯到公元前,迄今已有3000年的历史。
虽然自古代人们就使用了齿轮传动,但由于动力限制了机器的速度。
因此齿轮传动的研究迟迟未发展到动力学研究的阶段。
第一次工业革命推动了机器速度的提高,Euler提出的渐开线齿廓被广泛运用,这属于从齿轮机构的几何设计角度来适应速度的提高。
齿轮动力学国内外研究现状
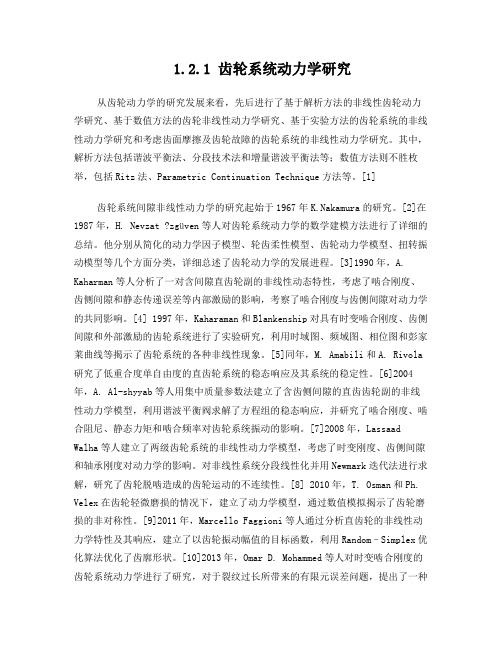
1.2.1 齿轮系统动力学研究从齿轮动力学的研究发展来看,先后进行了基于解析方法的非线性齿轮动力学研究、基于数值方法的齿轮非线性动力学研究、基于实验方法的齿轮系统的非线性动力学研究和考虑齿面摩擦及齿轮故障的齿轮系统的非线性动力学研究。
其中,解析方法包括谐波平衡法、分段技术法和增量谐波平衡法等;数值方法则不胜枚举,包括Ritz法、Parametric Continuation Technique方法等。
[1]齿轮系统间隙非线性动力学的研究起始于1967年K.Nakamura的研究。
[2]在1987年,H. Nevzat ?zgüven等人对齿轮系统动力学的数学建模方法进行了详细的总结。
他分别从简化的动力学因子模型、轮齿柔性模型、齿轮动力学模型、扭转振动模型等几个方面分类,详细总述了齿轮动力学的发展进程。
[3]1990年,A. Kaharman等人分析了一对含间隙直齿轮副的非线性动态特性,考虑了啮合刚度、齿侧间隙和静态传递误差等内部激励的影响,考察了啮合刚度与齿侧间隙对动力学的共同影响。
[4] 1997年,Kaharaman和Blankenship对具有时变啮合刚度、齿侧间隙和外部激励的齿轮系统进行了实验研究,利用时域图、频域图、相位图和彭家莱曲线等揭示了齿轮系统的各种非线性现象。
[5]同年,M. Amabili和A. Rivola 研究了低重合度单自由度的直齿轮系统的稳态响应及其系统的稳定性。
[6]2004年,A. Al-shyyab等人用集中质量参数法建立了含齿侧间隙的直齿齿轮副的非线性动力学模型,利用谐波平衡阀求解了方程组的稳态响应,并研究了啮合刚度、啮合阻尼、静态力矩和啮合频率对齿轮系统振动的影响。
[7]2008年,Lassaad Walha等人建立了两级齿轮系统的非线性动力学模型,考虑了时变刚度、齿侧间隙和轴承刚度对动力学的影响。
对非线性系统分段线性化并用Newmark迭代法进行求解,研究了齿轮脱啮造成的齿轮运动的不连续性。
机械类-毕业设计-开题报告-齿轮
1、研究的意义,同类研究工作国内外现状、存在问题(列出主要参考文献)研究意义:齿轮传动是机械中最常用的传动形式之一,广泛应用于机械、电子、纺织、冶金、采矿、汽车、航空、航天及船舶等领域。
随着科学技术的飞速发展,机械工业也发生着日新月异的变化,特别是近几十年来机电一体化产品的广泛应用,使得人们对齿轮的动态性能提出了更高的要求。
非线性动力学、振动、噪声及其控制己成为当前国际利技界研究得非常活跃的前沿课题之一。
在此同时,传统的静态设计方法也逐渐不能适应设计和运行的要求,而新兴的动态设计方法越来越被认同和采用。
在日常生活及工程应用中,人们广泛使用着各种各样的机器设备。
机械在工作过程中产生的振动,恶化了设备的动态性能,影响了设备的原有精度、生产效率和使用寿命,同时,机械振动所产生的噪声,又使环境受到了严重污染。
因此,齿轮系统的动力学行为和工作性能对各种机器和机械设备有着重要影响。
机械的振动和噪声,大部分来源于齿轮传动工作时产生的振动。
所以,机械产品对齿轮系统动态性能方面的要求就更为突出。
研究齿轮系统在传递动力和运动过程中的动力学行为的齿轮系统动力学一直受到人们的广泛关注。
齿轮传动系统的T作状态极为复杂,不仅载荷T况和动力装置会对系统引入外部激励,而且齿轮副本身的时变啮合刚度和误差也会对系统产生内部激励。
同刚出于润滑的需要也一般会提供必要的齿侧间隙;加之,由于齿轮传动过程中的磨损,也不可避免得在齿轮副中造成间隙。
在低速、重载的情况下,间隙对齿轮系统的动态性能不会产生严重的影响,用传统的线性动力学模型可以较好地反映齿轮传动的振动特性;在高速、轻载的情况下,由于齿侧问隙的存在,齿轮间的接触状态将会发生变化,从而导致齿轮间接触、脱齿、再接触的啮入啮出冲击,这种由间隙引发的冲击带来的强烈振动、噪声和较大的动载荷,影响齿轮的寿命和可靠性,从而促使人们对齿轮系统的非线动力学引起了足够的重视和关注。
现状:齿轮机构因为具有传动效高、结构紧凑、传动平稳等优点,被广泛地应用于各类机器设备上,尤其是重载传动方而,齿轮传动机构更是占据着举足轻重的地位。
ROMAX齿轮动力学分析和优化资料
万方数据
学校代号:10731 学 号:122080201078 密 级:公开
兰州理工大学硕士学位论文
基于 ROMAX 的齿轮箱动力学分析及 优化
学位申请人姓名: 导师姓名及职称: 培 养 单 位: 专 业 名 称: 论文提交日期 : 论文答辩日期 : 答辩委员会主席:
王彬 郭润兰 教授 黄华 副教授 机电工程学院 机械制造及其自动化 2015 年 4 月 15 日 2015 年 6 月 9 日 余生福 正高级工程师
万方数据
Dynamic Analysis and Optimization of the Gearbox Based on ROMAX by WANG Bin
B.E. (Lanzhou University of Technology) 2011
A thesis submitted in partial satisfaction of the Requirements for the degree of Master of Engineering in
学校代号 10731 分 类 号 TH131
学 号 122080201078
密级
公开
硕士学位论文
基于 ROMAX 的齿轮箱动力学分 析及优化设计
学位申请人姓名 培养单位 导师姓名及职称 学科专业 研究方向 论文提交日期
王彬 机电工程学院 郭润兰 教授 黄华 副教授 机械制造及其自动 先进制造技术 2015 年 4 月 15 日
Mechanical Manufacture and Automation in the
School of Mechanical and Electronical Engineering of
Lanzhou University of Technology
齿侧间隙对齿轮系统动力学行为的影响
齿侧 间隙的强非线性特性将导致齿轮系统在运行过程 中表
变啮合刚度和 内外部激励等因素的影响, 其齿轮系统无量纲动力 现出非线性特性。正常齿轮间隙状态时 , 如图 2所示。转速 由 01 .
学 型 J + £ ) 模 为 : 2 ‘‘ = 菇 ’ !( ) ( 厂
1 ) ^ nC^ ,) t + = s ( 4 ^ i Ot
可表示为: f一 1a > 1a (+ ) (+ )
l
f xt) {0 — ≤ ((): 1 1
【 x -1 +1 <-
f xt) { o (()=
一 1。 ≤( + ) (+ ) 1。
() 5
+ 1Ⅱ < ( + ) (+ ) 一 1n
常数 a的大小表示齿侧间隙的变化值 ,由于齿轮系统的非 线性激励源主要是 由齿侧间隙引起 , 齿侧间隙的变化必将导致齿 轮系统动力学形为的变化 。设定 [ 1的变化 区间 , 0 ] 将齿侧间
统 的动力 学行 为 , 齿轮传 动 系统 在混 沌状 态与周期状 态间发 生跃 变 。研 究结果 能够 为齿轮 传 动 系统 使 的设 计和故 障诊 断提供 一定 的参 考。 关键词 : 齿侧 间隙 ; 轮 ; 齿 动力 学
【 b ta t / re n l etenni a y a c e ai e r yt n e iee t ak A s c 】 nod r oa a z h o l e r nmisbh vo o a se u d r f rn bc — r t y n d r fg s m df
l hcreeth ir i pi d tega as i inss madga s m n i eair s a a fc t vba o a lueo h r tnms o yt r yt d a c bh o tf e t nm t f e r s e n e s e y m s v s e ,hc m ksh gr s t u pbtent h is a w lw i ae t a s mjm ew e ecat readp r dc t e Te td shQ_ l h ee y e h o c a n ei is t. u r u 厂 t o a h s y e r a e rneo a s m s ad aldans . s f ec fr e s t n fut i oi re gr y e g s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
齿轮系统动力学的理论体系*王建军 副教授王建军 李润方 摘要 根据对国内外齿轮系统动力学研究成果的系统总结,阐述齿轮系统动力学理论的基本结构体系。
说明齿轮动力学的发展过程;围绕动态激励、模型类型、建模和求解方法以及齿轮系统的固有特性、动态响应和动力稳定性等介绍齿轮系统动力学所涉及的基本问题,讨论该理论的主要工程应用的基础上,提出应进一步研究的方向与重点。
关键词 齿轮系统 动力学性能 理论体系 正问题 反问题中国图书资料分类法分类号 T G132.411 齿轮系统动力学基本理论体系齿轮系统动力学[1]是研究齿轮系统在传递运动和动力过程中的动力学行为的一门科学。
它以齿轮系统为对象,以齿轮副啮合过程的动力学特性为核心,以提高和改善齿轮系统的动力学行为为目的,在充分考虑系统各零部件动态特性的基础上,利用振动力学理论和方法,研究齿轮系统在传递动力和运动中振动、冲击、噪声的基本规律,为设计制造小振动、低噪声、高可靠性、高传动性能的齿轮系统提供理论依据。
齿轮系统是机器最主要的动力和运动传递装置,其力学行为和工作性能对整个机器有重要影响。
因此,齿轮系统动力学近百年来一直受到人们的广泛关注,尤其是近20年来,由于相关力学的理论与实验技术的发展,促进了齿轮系统动力学的深入研究。
迄今,已经形成了较为完整的齿轮系统动力学的基本理论体系(见图1),系统总结齿图1齿轮系统动力学的基本理论体系・动载系统的计算方法・振动噪声的评价与防治・状态监测与故障诊断・系统参数与动态性能的关系・载荷识别与动态设计齿轮动力学理论的应用动态响应(系统的输出)系统模型(系统的力学、数学描述)动态激励(系统的输入)・稳定性指标・稳定性区域・稳定性性能・系统参数对稳定性的影响动力稳定性・动载荷系统振动・系统参数的影响动态响应・固有频率・固有振型・参数对固有特性的影响固有特性・时变刚度・传递误差・齿侧间隙・支承弹性与间隙・系统阻尼考虑因素・齿轮副纯扭模型・齿轮传动系统模型模型类型・集中参数法・传递矩阵法・有限元法・动态子结构综合法建模方法・时变啮合刚度・轮齿传递误差・啮入啮出冲击内部激励・原动机的扭矩・负载的反作用力矩外部激励求解方法・时域法・频域法・解析法・数值法・实验法*国家自然科学基金资助项目(59575006),机械传动国家重点实验室开放基金资助项目收稿日期:1997—01—03 修回日期:1998—11—20轮系统动力学理论与方法的时机已经成熟。
2 齿轮系统动力学的发展2.1 分析理论(1)在本世纪50年代以前,以啮合冲击作为描述和解释齿轮动态激励、动态响应的基础,将齿轮系统简化为单自由度系统,以冲击作用下的单自由度系统的动态响应来表达齿轮系统的动力学行为。
50年代以后,将齿轮系统作为弹性的机械振动系统,以振动理论为基础,分析在啮合刚度、传递误差和啮合冲击作用下,系统的动力学行为。
这一发展奠定了现代齿轮系统动力学的基础。
(2)在振动理论的框架内,齿轮系统动力学经历了由线性振动理论向非线性振动理论的发展。
在线性振动理论范畴内,人们以平均啮合刚度替代时变啮合刚度,并由此计算齿轮副的固有频率和振型,利用数值积分法计算系统的动态响应,不考虑因时变啮合刚度引起的动态稳定问题,且避免研究由齿侧间隙引起的非线性以及多对齿轮副、齿轮副・55・齿轮系统动力学的理论体系——王建军 李润方与支承轴承、支承间隙等时变刚度间的相互关系、相互作用对系统动态特性的影响。
齿轮系统的非线性振动理论,在考虑了啮合刚度的时变性、齿侧间隙、齿轮啮合误差等非线性因素的情况下,将齿轮系统作为一种非线性的参数振动系统研究其基本理论、基本方法和基本性质。
从而由振动理论的基本概念出发,将啮合轮齿抽象为时变的弹性元件,统一描述和研究轮齿啮合中刚度的时变激励、误差的周期性激励和啮入啮出期间的冲击瞬态性激励,并将这种弹性元件作为整个齿轮系统的一个组成部分,可以在一个完整的弹性机械系统中来考察激励、系统、响应间的作用和相互影响,从激励和系统的统一性出发研究系统参数与结构的优化选择与配置。
2.2 分析系统齿轮系统动力学的研究对象经历了由一对齿轮副组成的简单系统向同时包含齿轮、传动轴、轴承和箱体结构的复杂系统的过渡。
将整个齿轮系统作为分析对象,可以全面研究齿轮系统的动态性能,齿轮啮合过程及系统其他零件对啮合过程动态激励的影响,还可以研究动态激励在系统中的传递特性和传递路线,同时可以研究轮齿动态啮合力、轴承支承反力、齿轮、传动轴和箱体的振动特性以及系统振动噪声的产生、传播与辐射。
2.3 分析方法利用时域方法、频域方法、解析方法、数值方法和实验方法,能够从多方面综合研究齿轮系统的瞬态特性、稳态特性和混沌特性。
3 齿轮系统动力学的基本问题3.1 正问题和反问题由图1可以看出,与一般弹性系统动力学问题类似,齿轮系统动力学的基本问题也是激励、系统特性和响应三者间的关系问题。
从性质上讲,有正问题和反问题两类。
(1)齿轮系统动力学正问题 它是已知齿轮系统和工作环境,分析求解在动态激励作用下系统的动态响应,包括确定和描述动态激励、系统的模型以及响应的求解。
正问题是目前齿轮动力学主要研究的问题。
(2)齿轮系统动力学反问题 它是已知动态响应,识别载荷(确定轮齿动载荷)、诊断故障、修正与精化模型等,涉及范围较宽,但目前的研究主要集中在故障诊断方面。
3.2 齿轮系统的动态激励齿轮系统动力学的首要问题是确定系统的动态激励。
齿轮系统的动态激励分为内部激励和外部激励。
外部激励是系统外部对其的作用,主要指原动机的主动力矩和负载的阻力矩。
外部激励的确定与一般机械系统是相同的。
内部激励是由齿轮副的轮齿啮合过程产生的,内部激励问题是齿轮系统动力学研究的重点之一。
内部激励包括刚度激励、误差激励和啮合冲击激励。
刚度激励是因啮合轮齿对数的变化导致啮合综合刚度随时间周期变化而引起齿轮轮齿啮合力周期变化。
刚度激励是一种参数激励,其力学效应使齿轮系统处于参数振动状态。
这样,即使在外载荷为零或常量的情况下,系统也会因刚度激励而产生振动。
在某种意义上,正是齿轮系统的刚度激励,确定了其系统动力学的基本性质和基本特征,决定了进行分析研究所必须采用的理论和方法。
刚度激励主要与齿轮副的设计参数(模数、重叠系数和齿廓修形参数等)有关。
因此,研究刚度激励以及与齿轮系统动态特性的关系,将有助于齿轮传动的参数设计。
由齿轮、轮齿的加工和安装误差引起的齿廓表面相对于理想齿廓位置的偏移是齿轮系统的误差激励。
误差激励是啮合轮齿间的一种周期性位移激励。
研究误差激励对系统的影响,可以了解各种轮齿加工误差与系统动态特性的关系,为齿轮设计中精度等级确定和加工方法选择提供指导。
此外,由于轮齿的受载变形和加工误差,轮齿在进入和退出啮合时,啮入啮出点的位置偏离理论啮合点,产生线外啮合,使啮合齿面间产生冲击,引起齿轮啮合过程中的周期性载荷激励—啮合冲击激励。
值得注意的是,齿轮系统的内部激励的重要特性在于它的周期性,因此特别适宜采用频谱分析方法进行研究。
通过静传递误差来描述周期性的内部激励,并将静传递误差函数进行傅里叶变换,进行谱分解,并由此确定影响内部激励的主要因素,以便更有效地采取措施减少内部激励。
3.3 齿轮系统的分析模型和求解方法建立齿轮系统的分析模型是齿轮系统动力学的中心任务,只有建立了分析模型,才能有效地对系统进行动力分析和动态设计。
此外,根据不同类型的模型,可以采用不同的方法进行求解。
3.3.1 建模方法建立齿轮系统分析模型的方法主要有传递矩阵法、集中参数法和有限元法等。
一般说来,齿轮系统可以分成传动系统和结构系统两部分。
传动系统可以采用传递矩阵法、集中・56・中国机械工程1998年第9卷第12期参数法和有限元法建模;结构系统则必须采用有限元法建模。
因此,在建立整个齿轮系统的分析模型时,往往采用动态子结构综合法的基本原理,综合运用多种建模方法。
从本质上讲,齿轮系统实际上是连续弹性系统,上述建模方法均是将这种连续弹性系统简化为离散弹性系统,因此数学模型均是常微分方程。
3.3.2 模型类型(1)动载系数模型 它是在齿轮动力学研究的早期使用的单自由度模型,主要用来确定轮齿啮合的动载系数。
(2)齿轮副扭转振动模型 它以一对齿轮副为分析对象,不考虑齿轮的横向振动位移,假设支承是刚性的,模型的广义自由度是齿轮副的扭转振动。
利用它来研究齿轮副的动态啮合问题。
且由于轮齿啮合动态激励的作用结果,最直接地导致齿轮副的扭转振动,因此扭转振动模型是齿轮系统动力学模型的最基本形式。
(3)传动系统模型 这种模型是以齿轮系统中的传动系统作为建模对象,模型包含了齿轮副、传动轴,有时又可以包含支承轴承、原动机和负载的惯性。
这类模型根据所考虑的振动形式(即广义自由度的性质)的不同又分为纯扭模型和弯、扭、轴、摆等多类自由度相互耦合的耦合型模型,同时耦合型模型根据耦合性质的不同,有啮合耦合型、转子耦合型和全耦合型等多种形式。
利用传动系统模型,不仅可以分析啮合轮齿的动载荷,而且可以确定系统中所有零件的动态特性及相互作用。
(4)齿轮系统模型 这种模型同时以齿轮系统中的传动系统和结构系统作为建模对象,因此可以在分析中同时考虑两种系统的相互作用效应,全面确定齿轮系统的动态特性,尤其是用于研究齿轮系统振动噪声的产生与传递。
在上述4类模型中,除动载系数模型外,其余3类模型均是目前常用的。
其中齿轮副扭转振动模型最简单,常用于传动轴和支承系统刚度较大时系统的建模,主要用此模型研究轮齿啮合的动态特性;第4类模型最复杂,在需要全面研究系统动态特性时采用。
3.3.3 求解方法关于解析方法,根据模型的不同类型应采用不同的求解方法。
其中关键问题之一是模型中时变参数和非线性参数的简化与描述,关于数值方法,则主要是各种数值积分法。
由于齿轮系统动态激励的周期性,系统在时域中的动态响应往往是稳定的周期性响应,因此,研究系统响应的频率结构,可更有效地了解激励、系统与响应三者关系,采用频域分析方法会更有效。
目前各类频谱分析仪器和分析软件已普遍使用,为齿轮系统的频域分析提供了较好的工具。
齿轮系统动态特性的实验分析是齿轮系统动力学的重要内容,它主要用于确定系统的动态特性,验证理论分析结果,精化和修正分析模型。
3.4 齿轮系统的动态特性3.4.1 固有特性目前,齿轮系统固有特性分析主要涉及:¹利用集中参数法研究齿轮传动系统的固有频率和振型;º利用有限元法计算齿轮轮体结构和箱体结构的固有频率和振型;»利用灵敏度分析和动态优化设计方法研究系统结构参数、几何参数与固有频率和振型的关系,进行结构动力修改。
3.4.2 动态响应在动态激励作用下齿轮系统的动态响应是齿轮系统动力学研究的重要内容,主要包括轮齿动态啮合力,轮齿激励在系统中的传递,传动系统中各零件的动态响应以及箱体结构的动态响应。