角速度和啮合频率的关系
齿轮啮合频率计算

齿轮啮合频率计算齿轮啮合频率是齿轮系的重要指标之一,对于齿轮的设计和制造具有重要的意义。
它是两个齿轮啮合时产生的振动次数,直接影响齿轮的噪声、振动和寿命等。
齿轮啮合频率的计算公式为:啮合频率=齿轮齿数×转速/60,其中转速的单位是转/分。
例如,如果一对啮合齿轮上,一个齿轮的齿数为20,另一个齿轮的齿数为40,齿轮传动时转速为1200转/分,则其啮合频率为:f = 20×1200/60 + 40×1200/60 = 800 Hz。
对于定轴齿轮,单个行星轮与齿圈的啮合频率等于行星轮的转频乘以它的齿数,也等于齿圈的转频乘以齿圈的齿数。
而对于具有多个行星轮的行星齿轮箱,所有行星轮与齿圈的啮合频率需要乘以行星轮数量,这是因为单个行星轮啮合周期的相位通常彼此之间是变化的。
但如果所有行星轮啮合周期都同相位,那么啮合频率就不需要乘以行星轮数量。
以上信息仅供参考,如需了解更多关于齿轮啮合频率计算的信息,建议咨询专业的齿轮工程师或者查阅相关文献。
齿轮啮合频率和转速之间存在明显的区别,主要体现在以下两个方面:1.定义和表示方法:•转速,通常用于描述齿轮旋转一周所需的时间,一般用每分钟转数(rpm)来表示。
例如,主齿轮的转速可能为2200rpm,马达齿轮的转速可能为3600rpm。
•啮合频率,则是指齿轮啮合出现的频率,即齿轮齿顶之间相互接触的次数,通常用赫兹(Hz)来表示。
例如,主齿轮的啮合频率可能为36.67Hz,马达齿轮的啮合频率可能为60Hz。
2.所描述的物理现象:•转速主要描述的是齿轮的旋转速度,它反映了齿轮在单位时间内旋转的圈数。
•啮合频率则描述了齿轮齿顶之间的接触频率,它反映了齿轮在单位时间内啮合的次数。
啮合频率与齿轮的齿数、转速以及齿轮的啮合方式(如定轴齿轮、行星齿轮等)有关。
总的来说,转速和啮合频率都是描述齿轮工作状态的重要参数,但它们分别描述了不同的物理现象。
转速更注重描述齿轮的旋转速度,而啮合频率则更注重描述齿轮齿顶之间的接触次数和频率。
振动常用术语

振动常用术语1. 机械振动物体相对于平衡位置所作的往复运动称为机械振动。
简称振动。
例如,机器箱体的颤动、管线的抖动、叶片的摆动等都属于机械振动。
振动用基本参数、即所谓“振动三要素” —振幅、频率、相位加以描述。
3. 振幅3.1 振幅振幅是物体动态运动或振动的幅度。
振幅是振动强度和能量水平的标志,是评判机器运转状态优劣的主要指标。
3.2 峰峰值、单峰值、有效值振幅的量值可以表示为峰峰值(pp)、单峰值(p)、有效值(rms)或平均值(ap)。
峰峰值是整个振动历程的最大值,即正峰与负峰之间的差值;单峰值是正峰或负峰的最大值;有效值即均方根值。
只有在纯正弦波(如简谐振动)的情况下,单峰值等于峰峰值的1/2,有效值等于单峰值的0.707倍,平均值等于单峰值的0.637倍;平均值在振动测量中很少使用。
它们之间的换算关系是:峰峰值=2×单峰值=2×21/2×有效值。
此换算关系并无多大的实用价值,只是说明振幅在表示为峰峰值、峰值、有效值时,数值不同、相差很大。
3.3 振动位移、振动速度、振动加速度振幅分别用振动位移、振动速度、振动加速度值加以描述、度量,三者相互之间可以通过微分或积分进行换算。
在振动测量中,除特别注明外,习惯上,振动位移的量值为峰峰值,单位是微米[μm]或密耳[mil];振动速度的量值为有效值,单位是毫米/秒[mm/s]或英寸/秒[ips];振动加速度的量值是单峰值,单位是重力加速度[g]或米/秒平方[m/s2],1[g] = 9.81[m/s2]。
可以认为,在低频范围内,振动强度与位移成正比;在中频范围内,振动强度与速度成正比;在高频范围内,振动强度与加速度成正比。
因为频率低意味着振动体在单位时间内振动的次数少、过程时间长,速度、加速度的数值相对较小且变化量更小,因此振动位移能够更清晰地反映出振动强度的大小;而频率高,意味着振动次数多、过程短,速度、尤其是加速度的数值及变化量大,因此振动强度与振动加速度成正比。
行星齿轮啮合频率的计算

外齿太阳轮:44*12=528Hz;
内齿太阳轮:77*0=0Hz;
行星轮:44/33*12*33=528Hz。
ቤተ መጻሕፍቲ ባይዱ
同学你好,这个我了解一些。
对于你的第一个问题:行星齿轮的啮合频率计算公式形式上与定轴齿轮有区别,对于通常的固定内齿圈的行星轮系,其啮合频率计算公式为fm=zr*(nr+n0)/60,其中zr为任一参考齿轮齿数,nr为参考齿轮转速,n0为行星架转速,其中转速以rpm计。虽然其形式上与传统定轴齿轮的不同,但推导过程所遵循的运动规律是完全一致的。
第二种是内齿圈输入,行星架固定,太阳轴输出
第三种是前一级的内齿圈旋转,并连接本级的行星架旋转,前一级的太阳轴连接本级的内齿圈,本级太阳轴输出。
第一种算啮合频率的思想就是假设行星架不动,内齿圈输入,这样就可以想象成内齿圈输入,太阳轴输出,输入的转速就等于行星架的转速,太阳轴输入转速相当于“太阳轴实际转速-行星架的转速”,因为两者运动同向;啮合频率就是内齿圈齿数×行星架转频=太阳轴的绝对转频(太阳轴实际转速-行星架的转频)×太阳轴齿数。
啮合齿轮的啮合频率是相同的也就是说太阳轮、行星轮和外太阳轮的啮合频率肯定是一样的。根据动力输入齿的啮合频率可以推出其余齿轮啮合频率。若果非得要算的话可以这样:外太阳轮齿数为Zw,太阳轮齿数为Zt,行星轮转速为Nx(r/s),行星轮啮合频率为Fx=Nx(Zw+Zt)。
下面是我对此问题的理解,不知对否,请各位大虾指点。
啮合对的啮合频率应该相同,但问题是行星减速器中,行星轮和内齿圈和太阳轴齿轮同时啮合,此时是两个啮合对,但是有行星轮参与,啮合频率的计算似乎复杂一些。
齿轮啮合频率计算
齿轮啮合频率计算
齿轮啮合频率是机械工程中一个重要的概念,它用来描述两个齿轮之间的啮合速度。
在这篇文章中,我将向您介绍齿轮啮合频率的计算方法,以及它在实际应用中的重要性。
让我们来了解一下什么是齿轮啮合频率。
齿轮啮合频率是指两个齿轮之间齿廓接触的频率,通常以每分钟的次数来表示。
它可以帮助我们判断齿轮的工作状态,以及是否存在异常磨损或故障。
计算齿轮啮合频率的方法相对简单,只需要知道齿轮的模数、齿数以及齿轮的转速即可。
首先,我们需要计算出每个齿轮的转速,这可以通过将驱动齿轮的转速乘以驱动齿轮的齿数,再除以被驱动齿轮的齿数来得到。
然后,我们将每个齿轮的转速相加,就可以得到齿轮啮合频率。
齿轮啮合频率的计算对于机械工程师来说非常重要。
通过计算齿轮啮合频率,我们可以确定齿轮的工作状态是否正常,是否需要进行维护或更换。
此外,齿轮啮合频率还可以用于计算齿轮的寿命和可靠性,对于设计和选择适当的齿轮传动系统非常有帮助。
除了计算齿轮啮合频率,我们还可以通过其他方法来判断齿轮的工作状态。
例如,通过观察齿轮表面的磨损情况、听取齿轮传动时的声音以及测量齿轮的振动等。
这些方法可以与齿轮啮合频率的计算相结合,来全面评估齿轮的工作状态。
总结一下,齿轮啮合频率是描述齿轮之间啮合速度的重要指标。
通过计算齿轮的模数、齿数和转速,我们可以得到齿轮啮合频率。
这个指标对于判断齿轮的工作状态、设计合适的齿轮传动系统以及评估齿轮的寿命和可靠性非常重要。
在实际应用中,我们可以通过观察齿轮的磨损情况、听取齿轮传动时的声音和测量齿轮的振动等方法来辅助判断齿轮的工作状态。
论述齿轮啮合频率产生的机理及齿轮故障诊断方法

一、论述齿轮啮合频率产生的机理及齿轮故障诊断方法一、齿轮啮合频率的机理由齿轮传动理论可知,渐开线齿廓齿轮在节点附近为单齿啮合,而在节线的两边为双齿啮合,啮合区的大小则由重叠系数ε决定。
因此,每对轮齿在啮合过程中承受的载荷是变化的,从而引起齿轮的振动,另外,一对轮齿在啮合过程中两齿面的相对滑动速度和摩擦力均在节点处改变方向,引起齿轮的振动.这两者形成了啮合频率fz 及其谐波Nfz ,其计算式为:60z nZf =式中 Z ——齿轮的齿数;n ——轴的转速,/min r 。
60z nZNf N =⋅式中N —自然数,1,2,3,……。
N=1称为基波,即啮合频率;N = 2,3,……时,称为二次,三次…谐波。
啮合频率fz 及其谐波Nfz 的频谱特点:①初始状态,啮合颇率的幅值最高,各次谐波的幅值依次减小(图1的实线部分);②随着齿轮磨损的增加,渐开线齿廓逐渐受到破坏,使齿轮振动加剧,此时啮合频率及其各次谐波的幅值逐渐增大,而且各次谐波幅值的增加比啮合频率快得多(图中虚线所示); ③磨损严重时,二次谐波幅值超过啮合频率幅值。
图1 啮合频率及其谐波图2 严重磨损时的啮合频率及其二次谐波由频谱图上啮合频率及其谐波幅值的增量可判断出齿轮的磨损程度。
啮合频率分析:(1)负载和啮合刚度的周期性变化负载和啮合刚度的变化可用两点来说明:一是随着啮合点位置的变化,参加啮合的单一齿轮的刚度发生了变化,二是参加啮合的齿数在变化。
如渐开线直齿轮,在节点附近是单齿啮合,在节线两侧某部位开始至齿顶、齿根区段为双齿啮合。
显然,在双齿啮合时,整个齿轮的载荷由两个齿分担,故此时齿轮的啮合刚度就较大;同理单齿啮合时,载荷由一个齿承担,此时齿轮的啮合刚度较小。
从一个轮齿开始进入啮合到下一个轮齿进入啮合,齿轮的负载和啮合刚度就变化一次,所以齿轮的负载和啮合刚度周期性变化的频率与齿轮旋转频率成整数倍关系。
(2)节线冲击的周期性变化齿轮在啮合过程中,轮齿表面既有相对滚动,又有相对滑动。
高中物理圆周运动知识点.

高中物理圆周运动知识点.
描述圆周运动的物理量及其关系
1.角速度、周期、转速之间的关系ω=2π/T=2nπ
即角速度与周期成反比,与转速成正比。
(1)转速n的单位为r/s.
(2)ω、T、n三个量中任意一个确定,其余两个也就确定。
2.线速度与角速度的关系v=rω
r一定时,v∝ω,如圆盘转动时,圆盘上某点的ω越大则v越大
ω一定时,v∝r,如时钟的分针转动时,分针上各质点的ω相同,但分针上离圆心越远的质点,r越大,v也越大
v一定时,ω∝1/r,如皮带传动装置中,两轮边缘上各点线速度大小相等,但大轮的r较大,ω较小
3.线速度与周期的关系v=2πr/T,即当半径r相同时,周期小的线速度大。
特别提醒:
(1)v、ω、r是瞬时对应关系,只有控制一个量不变,才能确定另外两个量是正比还是反比关系。
(2)描述匀速圆周运动的线速度大小不变,方向时刻变化,即线速度是变化的,而角速度、周期、转速是不变的。
论述齿轮啮合频率产生的机理及齿轮故障诊断方法
论述齿轮啮合频率产生的机理及齿轮故障诊断方法齿轮啮合频率是指齿轮齿数之比乘以齿轮转速之差,它是齿轮啮合过程中产生的基本频率。
齿轮啮合频率产生的机理主要有以下几个方面:1.齿轮齿数之比:齿轮齿数之比是齿轮啮合频率的主要决定因素。
齿轮啮合频率与齿数之比成正比,齿数越多,啮合频率越高。
2.齿轮转速之差:齿轮啮合频率还与齿轮转速之差有关。
当齿轮转速之差增大时,啮合频率也会相应增加。
3.齿白度:齿轮啮合过程中,齿轮齿面的齿白度是产生啮合频率的重要因素。
如果齿轮齿面的齿白度不均匀,会引起齿轮啮合频率的变化。
齿轮故障诊断方法主要有以下几种:1.声音诊断法:通过听齿轮啮合过程中的声音,判断是否存在异常声音。
异常声音可能是因为齿轮齿面磨损、齿面接触不良等故障引起的。
2.振动诊断法:通过测量齿轮转动时的振动信号,判断齿轮是否存在故障。
齿轮故障会引起振动信号的变化,通过对振动信号的分析和比较,可以判断齿轮的故障类型和程度。
3.温度诊断法:通过测量齿轮表面的温度变化,来判断齿轮是否存在故障。
齿轮故障会导致齿轮表面的摩擦产生热量,从而引起温度的升高。
4.油液分析法:通过对齿轮箱中的润滑油进行分析,判断齿轮是否存在故障。
齿轮故障会导致润滑油中金属颗粒和其他杂质的含量增加,通过分析润滑油的成分和性质,可以判断故障的类型和程度。
5.振弦诊断法:通过在齿轮上安装振弦传感器,采集齿轮振动信号,并通过信号分析来判断齿轮是否存在故障。
振弦传感器可以感知齿轮振动的幅值、频率等特征,通过与正常状态下的信号进行比较,可以判断故障的类型和程度。
综上所述,齿轮啮合频率是齿轮啮合过程中产生的基本频率,其机理主要与齿轮齿数之比、齿轮转速之差以及齿白度等因素有关。
针对齿轮故障的诊断方法包括声音诊断法、振动诊断法、温度诊断法、油液分析法以及振弦诊断法等。
这些方法可以通过检测齿轮的声音、振动、温度变化以及润滑油中的杂质等特征,来判断齿轮是否存在故障以及故障的类型和程度。
论述齿轮啮合频率产生的机理及齿轮故障诊断方法
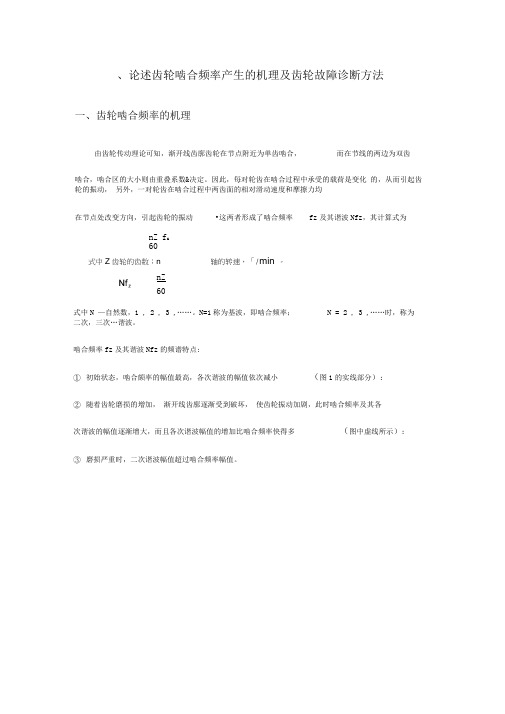
、论述齿轮啮合频率产生的机理及齿轮故障诊断方法一、齿轮啮合频率的机理由齿轮传动理论可知,渐开线齿廓齿轮在节点附近为单齿啮合,而在节线的两边为双齿啮合,啮合区的大小则由重叠系数&决定。
因此,每对轮齿在啮合过程中承受的载荷是变化的,从而引起齿轮的振动,另外,一对轮齿在啮合过程中两齿面的相对滑动速度和摩擦力均在节点处改变方向,引起齿轮的振动•这两者形成了啮合频率fz及其谐波Nfz,其计算式为nZ f z60式中Z 齿轮的齿数;n轴的转速,「/min 。
nZ60式中N —自然数,1 , 2 , 3 ,……。
N=1称为基波,即啮合频率;N = 2 , 3 ,……时,称为二次,三次…谐波。
啮合频率fz及其谐波Nfz的频谱特点:①初始状态,啮合颇率的幅值最高,各次谐波的幅值依次减小(图1的实线部分);②随着齿轮磨损的增加,渐开线齿廓逐渐受到破坏,使齿轮振动加剧,此时啮合频率及其各次谐波的幅值逐渐增大,而且各次谐波幅值的增加比啮合频率快得多(图中虚线所示);③磨损严重时,二次谐波幅值超过啮合频率幅值。
由频谱图上啮合频率及其谐波幅值的增量可判断出齿轮的磨损程度。
啮合频率分析:(1 )负载和啮合刚度的周期性变化负载和啮合刚度的变化可用两点来说明: 一是随着啮合点位置的变化,参加啮合的单一齿轮的刚度发生了变化, 二是参加啮合的齿数在变化。
如渐开线直齿轮, 在节点附近是单齿 啮合,在节线两侧某部位开始至齿顶、齿根区段为双齿啮合。
显然,在双齿啮合时,整个齿 轮的载荷由两个齿分担, 故此时齿轮的啮合刚度就较大; 同理单齿啮合时,载荷由一个齿承 担,此时齿轮的啮合刚度较小。
从一个轮齿开始进入啮合到下一个轮齿进入啮合, 齿轮的负 载和啮合刚度就变化一次, 所以齿轮的负载和啮合刚度周期性变化的频率与齿轮旋转频率成 整数倍关系。
(2 )节线冲击的周期性变化齿轮在啮合过程中,轮齿表面既有相对滚动, 又有相对滑动。
主动轮带动从动轮旋转时, 主动轮上的啮合点从齿根移向齿顶, 啮合半径逐渐增大, 速度渐次增高;而从动轮上的啮合 点是由齿顶移向齿根, 啮合半径逐渐减小, 速度渐次降低。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
角速度和啮合频率的关系
角速度和啮合频率是在机械系统中非常重要的两个概念。
它们
之间的关系对于理解和设计各种机械系统都至关重要。
在这篇文章中,我们将探讨角速度和啮合频率之间的关系,以及它们在机械工
程中的应用。
首先,让我们来了解一下角速度和啮合频率分别是什么。
角速
度是一个物体绕着某一点旋转的速度,通常用符号ω表示,单位是
弧度每秒(rad/s)。
而啮合频率则是指齿轮啮合时每单位时间内啮
合齿轮的齿数,通常用符号f表示,单位是赫兹(Hz)。
在机械系统中,齿轮是常见的传动元件,齿轮的啮合频率与角
速度之间存在着密切的关系。
啮合频率可以用角速度来表示,具体
的关系如下:
啮合频率 = 啮合齿轮的齿数× 角速度。
这个公式表明了啮合频率与角速度之间的直接关系。
当角速度
增大时,啮合频率也会增大;当角速度减小时,啮合频率也会减小。
这就意味着,通过控制角速度,我们可以间接地控制啮合频率,从
而调节机械系统的传动性能。
在实际应用中,了解角速度和啮合频率之间的关系对于设计和优化机械系统至关重要。
例如,在汽车变速箱中,通过调节发动机的转速(即角速度),可以实现不同档位的换挡,从而改变啮合频率,实现不同速度的行驶。
又如在工业生产中,通过控制齿轮传动系统的角速度,可以实现精确的传动比,从而满足不同工艺要求。
总之,角速度和啮合频率之间存在着密切的关系,它们是机械系统中不可或缺的重要参数。
通过深入理解它们之间的关系,我们可以更好地设计和优化机械系统,实现更高效、更可靠的传动。