沥青混凝土摊铺机自动找平梁的原理分析
摊铺机平衡梁工作原理

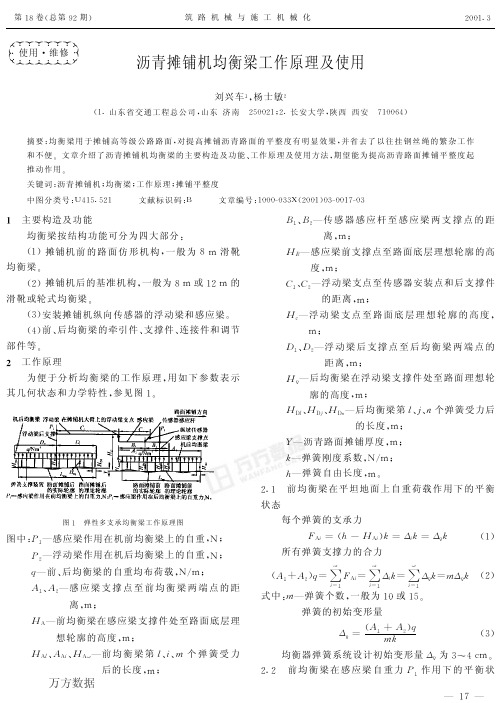
摊铺机平衡梁工作原理摊铺机是一种用于道路施工的重要设备,而平衡梁作为摊铺机的重要部件,其工作原理对摊铺机的施工效果起着至关重要的作用。
下面我们将详细介绍摊铺机平衡梁的工作原理。
首先,摊铺机平衡梁的工作原理可以简单描述为,通过平衡梁的调节,使得摊铺机在不同路面情况下能够保持平稳的工作状态,从而确保铺设的道路材料厚度均匀、质量优良。
平衡梁通过对摊铺机的重心进行调节,使得摊铺机能够在不同路面坡度和不平整度下保持水平,从而避免道路材料铺设时出现高低错台、松紧不一等质量问题。
其次,摊铺机平衡梁的工作原理涉及到多个关键部件的协同作用。
比如,平衡梁通过液压系统对摊铺机的前后支撑轮进行调节,从而实现对摊铺机整体重心的调节;同时,平衡梁还通过传感器对路面坡度和高低进行实时监测,再通过控制系统对液压系统进行调节,使得摊铺机能够及时响应路面情况的变化,保持平稳工作状态。
此外,摊铺机平衡梁的工作原理还涉及到一定的自动化控制技术。
现代摊铺机平衡梁通常配备有先进的电子控制系统,能够实现对平衡梁的精确控制,实现对道路材料铺设厚度的精准调节,从而保证道路铺设的质量和均匀性。
通过对摊铺机平衡梁工作原理的深入理解,可以更好地掌握摊铺机的操作技巧,提高施工效率和道路质量。
总的来说,摊铺机平衡梁的工作原理是一个涉及液压、传感器、控制系统等多个领域的复杂系统工程,其关键在于通过对摊铺机重心的精确调节,使得摊铺机能够在不同路面情况下保持平稳工作状态,从而实现道路材料的均匀铺设。
随着科技的不断进步,摊铺机平衡梁的工作原理也在不断完善和提升,为道路施工质量的提升提供了重要支撑。
希望通过本文的介绍,能够使大家对摊铺机平衡梁的工作原理有更深入的了解。
pdf全文沥青摊铺机均衡梁工作原理及使用
&’$ + &$
#,%
(’$+ #-". -$%&’$/" &’$使 弹 簧 产 生 的 变 形
#0%
1&’$ +
&’$ 23
#4%
(’$使 弹 簧 产 生 的 变 形
1 + (5$6
",(’$6 32#2 7 $%#2 .
$%8
+
$"#-". -$%&’$6 32#2 7 $%#2 . $%8
式中:8;弹簧节距!<!一般为 =>?@
JC6I8= JKC6I使 弹 簧 产 生 的 变 形
1MI6+
2I33+
I 2
(I6使 感 应 梁 支 点 产 生 的 位 移
#$=%
1 + EI6BC
",(I668 32#27 $%#2.
$%8"+
",I38=6 32#27 $%#2.
$%8
N O + 2"#,2I78=$%-#"2".8.-$$%8+ 2#$2"I78=$#%-#2"..-$$%%8"#$$%
Hale Waihona Puke #$"%JC6I作用后感应梁支点处的位移变化量 IBC
IBC+
1JI67
1 + (I6BC
2I7
$"I8=#-".-$% 2#27 $%#2. $%8"
#$H%
前 均 衡 梁 2+ $=时!-"P -$!效 果 是 当 路 面 底 基
摊铺机平衡梁工作原理

摊铺机平衡梁工作原理
摊铺机平衡梁工作原理是通过设置一根平衡梁来实现平衡的。
平衡梁通常是一个横跨在摊铺机框架上的杠杆,两端各有一个支点。
摊铺机的主体部分通过连接装置固定在平衡梁的中央。
当摊铺机运行时,摊铺材料进入机器,通过输送带或者其他输送装置进入摊铺区域。
同时,摊铺机的引擎和相关的传动系统会带动整个机器的运动。
在这个过程中,摊铺机产生的重量和力量会通过连接装置传递给平衡梁。
平衡梁会在两个支点上受力,并将这些力量和重量分散到支点下方的地面上。
通过调节平衡梁的长度和位置,可以实现对摊铺机的平衡调节。
当摊铺机的重心偏离平衡点时,平衡梁会承受不均衡的力量,并将之转移到支点下方的地面上。
通过这种方式,保持了摊铺机的稳定性和平衡性。
摊铺机平衡梁工作原理的关键在于合理设计支点的位置和平衡梁的长度。
这样可以确保摊铺机在工作时能够保持平衡,减少振动和不稳定的情况,从而提高摊铺工作的效率和质量。
沥青摊铺机原理
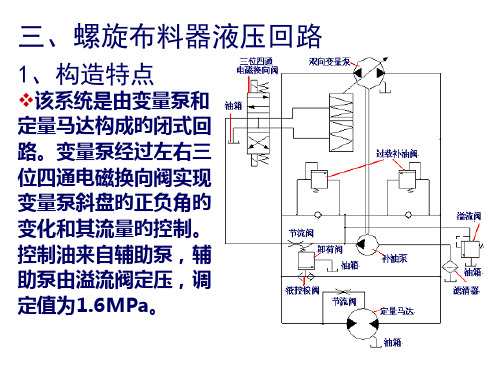
四、熨平板提升液压回路
❖手动换向阀置上位,熨 平板处于浮动位置,升降 油缸油腔浮动;处于第二 位时,来油进入油缸大腔, 熨平板下降,此时油压由 调压式溢流阀调定,调定 值为3Mpa,处于第三位 时,熨平板处于静止状态; 此时来油进入油缸小腔, 熨平板上升,经节流阀旳 油压也进入油缸旳小腔, 为熨平板旳上升增长了辅 助油压,油压由调压式溢 流阀调定2-7MPa。
2、机械式浮动梁找平
❖机械式浮动基准梁 是一种随摊铺机一起 运动旳基准,它以较 大范围内多点高度旳 平均值来控制摊铺厚 度,一般用于高程已 经精确校正后旳下面 层上摊铺上面层。
2、机械式浮动梁找平 自动找平系统
❖因道路靠路边旳平整度要比靠路中心旳平整度 差诸多使误差比较大。为处理老式平均梁旳不足 之处,工程上常采用一种跨越熨平板,适于大型 摊铺机整幅摊触平衡梁(SAS系统)找平
❖由声纳追踪器和控制盒、平衡杆构成。一根平衡杆 上装有四个声纳追踪器,声纳追踪器以地面为基准, 每个探头每秒发射39次声脉,精确测出距离平均值, 再经过传感器指挥机械本身旳液压浮动装置来控制升 降高度,以到达更加好旳光滑平整旳摊铺效果。工作 中声纳追踪器(为一种高程控制传感器)发射高频声 脉冲,并测出从物理参照物(如地面)反射回来旳回脉 之时间,然后发出信息给控制盒,控制盒检测此信息 并控制升降油缸以维护合适旳面层厚度,以到达平整 旳摊铺效果。
4、RSS非接触式激光扫描自动找平
❖使用激光扫描器B 发射出多束不可见旳 激光到路面A上,这 些激光波从路面反射 回扫描器,扫描器内 旳电子装置根据从发 射到接受激光波所经 过旳时间旳变化,计 算出激光波所运营旳 距离变化,及时进行 熨平厚度旳调整以确 保摊铺层旳平整度。
❖但对于高等级公路沥青路面旳铺筑,仍需要在摊 铺机上安装自找平装置,该装置可使摊铺机摊铺旳 平整度进一步提升。
沥青混凝土摊铺机找平均衡梁的频率特性
沥青混凝土摊铺机找平均衡梁的频率特性赫00—√沥青混凝土摊铺机找平均衡粱的频率特性长安大学郁录平惠辉袁明虎i摘要:介绍沥青摊铺机均衡梁的结构及其工作原理.利用正弦量的旋转矢量的表示方法,!i分析基准梁长度,滑靴的间距和滑靴长度对基准梁的频率特性的影响.通过对基准梁的幅值特性!;曲线的研究,给出基准梁滑靴的最优设计,以保证基准梁对地面波动干扰最佳的衰减能力.!;?…◆◆…◆1…◆…?.◆.◆….◆◆◆….◆….◆….◆….◆…,◆1◆…?◆◆◆◆…◆.◆….◆.◆.◆...◆◆◆.◆…◆…..m◆关键词:沥青混凝土摊铺机基准梁频率特性1问题的提出沥青混凝土摊铺机采用以均衡梁作为自动找平系统的基准后,不需要专门架设基准线,消除了由于基准线变形等不确定因素带来的摊铺误差,可以避免在挂线过程中产生的累积误差和摊铺过程中的掉线问题,因此能很好地保证路面平整度.由于采用均衡梁的摊铺机是以路基和铺过的路面为相对基准进行摊铺的,所以路面铺层的厚度均匀,路面强度得到了保证.但是,与此同时,地面的不平整也总会以某种形式进入自动找平系统,影响摊铺机的作业质量.所以均衡梁性能是一个值得我们研究的问题.2跨越式均衡梁的工作原理简介2.1基本结构跨越式均衡梁由三部分组成(图1),即铰接于摊铺机前端,后端的浮动基准梁和跨越于摊铺机熨平板前后且铰接于摊铺机动臂的杆件(即前,后连接梁).常见的基准梁有杆件铰接式和弹簧支撑式两种,其主要功能是高效滤波作用,而且两种的实际使用性能相近.本文讨论弹簧支撑式,其主要结论也可以应用于杆件铰接式基准梁.2.2基准梁工作原理跨越式均衡梁用其基准梁对地面进行滤波后,一16一1.滑靴2.后基准梁3.后连接梁4.传感器5.前连接梁6.前基准梁图1均衡梁结构原理示意图通过前后连接梁给摊铺机提供一个高度相当稳定的参考点,摊铺机的找平控制系统以该点为基准确定铺层厚度,起调平作用.2.2.1基准梁高度与路面高度的关系为了便于进行分析,在下面的讨论中,我们暂时不考虑弹簧下面滑靴的长度对基准梁性能的影响.这时基准梁的重量由n个滑靴上面的弹簧的弹性力来支撑.设开始时基准梁工作于水平地面上,n个滑靴上弹簧的压缩长度相同,基准梁与地面的距离保持一个常量(图2a).在这时,基准梁离开地面的高度.为:ho=H一△(1)式中:滑靴上弹簧的自由长度△——基准梁在水平地面时每个弹簧的压缩量12……f……"l2……f……"(a)(b)图2基准梁的工作过程分析拭2006(1)Ah=导(2)式中:G——基准梁的重量n——基准梁下面滑靴的数量——每个滑靴上弹簧的刚度系数当摊铺机向前运动了距离,使基准梁工作于不平整的地面上时(图2b),设第i个滑靴处地面的高度为,第i个滑靴上弹簧的实际长度为h,则基准梁中心处的高度()为:()=()=n(一△)胡+一n△即:)=+(3)△粤(4)AhFn=G=Ah(5)式中:△厂一在基准梁的重量作用下第个滑靴上弹簧的变形'G『__一基准梁作用在第个滑靴上的重力将上式代入(3)后,再将(1)式代入得:h(x)=ho+yi(6)如果将基准梁开始工作时中心的高度y(x),从它在初始水平地面工作时的高度算起(即以图2a中的0点算起),则有:y()=()一ho=F():∑yi()(7)这就是说,基准梁工作时其中心的高度变化量为其下面滑靴所在位置处,地面高度变化的平均值.从信号分析的角度来说,n个滑靴向基准梁输入了yl),y2(x),……),n个信号,而基准梁的输出y)就是这n个信号的平均值,通常将这称作为基准梁的滤波作用.2.2.2基准梁滤波时的频率特性前面是在幅值范围内用常规方法分析了基准梁的滤波作用,未考虑地面的频率成分对基准梁性能的影响,下面讨论基准梁滤波时的频率特性.设基准梁工作于一条高度按正弦规律工彳{杠拭2006(1)(y=Asin(IJ)变化的地面上(图3),我们以最后面一个滑靴所在的位置作为计算的起点.在基准梁工作的过程中,第个滑靴所在位置的地面高为:yi(x)=Asin(IJ+(一1)1]=Asin(+)(i=1,2,…n)(8)式中:卜一滑靴之间的距离A——地面波动的幅值广~地面波动的角频率_地面波动的周期(T=2~r/(IJ)厂第个滑靴所在位置的初相位=(一1)(=1,2,…n)(9)将(8)代入(7)得:y()=n()=Asin[争+训(1o)这是n个滑靴向基准梁对应输入的n个周期,幅值相同,仅相位角不同的正弦信号,基准梁的输出y)就是这n个正弦信号的平均值.利用正弦信号的旋转矢量表示法可以容易地求得这个平均值.函数():Asin[+】用旋转矢量可以表示为图4的形式.A表示矢量的模,旋转矢量Y可以用其初相位表示为以下形式:j,:Ay.cos~i+iAsinai(11)这种周期相同的旋转矢量可以用矢量求和的方法得到合成矢量.如图5所示,有两个同周期的旋转'l一''…/,}■rl,I一●●●●/—/ff一—Z—Z一l一.—I图3基准梁的频率特性示意图y—~图4正弦周期信号旋转矢量表示一图5旋转矢量的合成矢量Y和Y:,其合成矢量Y的周期与其分矢量相同,也是.合成矢量Y的幅值A及初相位可用图5中的平行四边形法则求得,也可用下式计算: A产[(Aycosq~l+Aycos~)+(Ay,sinq~l+Aysin~)z] (12)'D=taI1~—Aysincpl+—Aysin~(13)Acosqh+AHCOS(p2多个矢量的合成方法与上面的两个矢量合成方法相同,这样可以得基准梁的中心高度Y的旋转矢量表示式:=1n(Ac.ssi嗽)=c.ssin(?4)矢量Y的幅值,也就是基准梁中心高度变化的幅值A由下式求得:产耋cos小n)J上式两边同除以A,可得地面频率成分的周期为时,基准梁中点处响应的幅值A与地面波动幅值A之比K()即:18一上.1『\\1K()=AL=I(∑c.s)+(∑sin)I.L,i=l,i=lJ(16)对于给定的基准梁,其滑靴的数量n,弹簧间距Z是确定的,对于给定的周期,可以用(9)式求出所有的来,再代人(16)式求得K().另取一个周期,用同样的方法可以得到相应的K(),依次类推.以为横坐标,K()为纵坐标,可以画出基准梁的K()一曲线来,这实际上就是基准梁的幅值特性曲线.图6为/=0.3m,/1,=8,16时的K()曲线.由图6可以看出,在滑靴的间距Z给定的条件下,增加滑靴的数量n(也就是增加基准梁的长度)可以改善基准梁的频率特性.图中在T=0.3,0.15, 0.1m等处频率没有被衰减,其原因是,在这种情况下相邻的两个滑靴刚好同时处于路基波形的波峰或波谷位置(图7),基准梁对这种频率成分就没有滤波的作用.也就是说,在不计滑靴长度的条件下,基准梁对周期T=I/m(m为正整数)的路基频率成分没有衰减作用.图8为/=0.3m,0.6m,基准梁长度L=6m时的K()曲线.由图8可以看出,在基准梁的长度一定时,滑靴的间距对基准的点的影响.这时滑靴的数量越多,基准梁的频率特性越好.和上图相同的是,周期为滑靴间距的整数分之一的波形同样没有被基准梁衰减.从图6,图8还可以看出,基准梁对周期特别长的频率成分没有衰减作用.事实上,我们也没有必要对周期很长的频率成分进行衰减,因为长周期的频率成分已经不再是路面的不平度,而是路面的坡度.3滑靴长度对基准梁性能的影响实际上滑靴是存在一个长度Z的,如图1所示,对于周期T<l的地面频率成分,可以认为滑靴只在图6l=0.3Ill.n=8,16时的基准梁的幅值特性曲线杠拭2006(1)卜一相邻两个滑靴的间距-_—地面波形周期图7基准梁没有滤波作用状态时.滑靴工作状态示意图(a)(b)图9滑靴长度对基准梁特性的影响If】~~—,九,,一/\/.图8l=0.3m,0.6m.6m时的基准梁的幅值特性曲线其波峰上滑动(图9a),地面的这部分频率成分不会引起滑靴上下运动.对于周期T>l,的地面频率成分,可以近似地认为滑靴的上下波动量为2A(图9b).对于图9l】的情况,△与A的比值和r的关系如式(17)所示.^1一=__1(1+COS)(17)^'j,L1将图9中的两种情况汇总在一起.可以得到地面波动的周期与滑靴上下运动的关系曲线(图l0),这可以看作滑靴的幅值特性.由前面的讨论可以看出,通过恰当的设计基准梁长度L,滑靴间距l,可以实现使基准梁对周期大于l的地面频率成分有满意的滤波性能.所以,确定滑靴的长度z,时,只要使其可以很好地衰减周期小于等于l的频率分量便可.根据图10的频率特性曲线,最好应该使z.>l,但这样前后滑靴会发生干涉现象.由(17)式可以求得,当删F1.5时,&/A--0.25.这个衰减效果也是相当良好的.所以,笔者建议设计滑靴时,最好使l/l>O7.图10地面波动的周期与滑靴上下运动的关系(1)滑靴的间距一定时,基准梁的长度越大,找平基准粱的频率衰减特性越好.但由于对周期太长的地面频率成分没有衰减的必要,所以基准梁也没有必要太长,一般9m左右可以基本满足要求.(2)基准梁长度一定时,滑靴的间距越小,找平基准梁的频率衰减特性越好.也就是说在基准梁上装尽可能多的滑靴将使滤波效果大大改善.同时增加滑靴长度也可以改善基准梁的滤波特性,但过多的滑靴会使基准梁结构复杂,滑靴的间距应定为多少,可根据工程实践具体而定.(3)为了使基准梁对周期较短的地面波动有较好的衰减作用,建议滑靴的长度应该大于其间距的70%参考资料1李宝蕴,马广维.沥青摊铺机双纵向跨越式平均粱分析.工程机械,1999(10)2刘兴车,杨士敏.沥青摊铺机均衡梁工作原理及使用.筑路机械与施工机械化,2001(3)3王晓忠.跨越式均衡梁的正确安装,调试与提高路面平整度.筑路机械与施工机械化.1999(5)4结论稠本文所述的分析础可以i十算出均衡梁.陕酣西安市长安大学5的频率特性,这对设计和制作均衡梁具有一定的价值.从文中分析可以看出:工缸敞2006(1)l9. .。
沥青混凝土摊铺机自动找平梁的原理分析及运用
编号:AQ-JS-07648( 安全技术)单位:_____________________审批:_____________________日期:_____________________WORD文档/ A4打印/ 可编辑沥青混凝土摊铺机自动找平梁的原理分析及运用Principle analysis and application of automatic leveling beam of asphalt concrete paver沥青混凝土摊铺机自动找平梁的原理分析及运用使用备注:技术安全主要是通过对技术和安全本质性的再认识以提高对技术和安全的理解,进而形成更加科学的技术安全观,并在新技术安全观指引下改进安全技术和安全措施,最终达到提高安全性的目的。
平整度是评价高等级公路使用质量的一个重要参数,因此平整度控制也是路面施工控制中的一个重要环节。
良好的平整度水平,来自于:①基底和各结构层的稳定性,无突变的、不均匀的沉降;②各结构层本身连续、均衡的压实度和平整度水平,较小的变异性;③施工工艺中,基准面的设定,沥青混凝土的拌和、摊铺、碾压,以及接缝处理等,各个环节的精细操作。
其中,如何在路面施工过程中,为摊铺机行走提供一个准确的平整度参照系,是达到良好的平整度水平的先决条件之一。
1规范要求及施工中规定(1)根据《公路沥青路面施工技术规范》(JTJ032-94)规定,“用于铺筑高速公路和一级公路的沥青混凝土摊铺机应……:具有自动或者半自动方式调节摊铺厚度及找平的装置……”。
“摊铺机自动找平时,中、下面层宜采用一侧钢丝绳引导的高程控制方式。
表面层宜采用摊铺层前后保持相同高差的雪橇式摊铺厚度控制方式……”。
沈大和京津塘等高速公路也正是按此程序控制的。
(2)美国沥青协会《路面铺装手册》中提出,如果下面层已经非常接近容许误差,走雪撬也可以提供出光滑的面层。
在沪宁高速公路的路面施工实践中,通过详尽的调查分析和比较后,认为:在高等级公路施工中,及采用进口摊铺机械的情况下,摊最度较为容易控制;而高程误差经底基层、基层、下面层施工,已相对消除,对于中、上面层,平整度要求成为主要控制因素,高程要求相对次要;再之,一侧钢丝绳的引导对于灵敏度相对较高的进口摊铺机械来说,当然是不够的。
沥青混凝土摊铺机自动找平梁的结构及原理分析
般 前着 地 部 分 至少 由4 轮 子 ( 雪橇 板 ) 成 , 中一个 轮子 若 遇 组 或 组 其
到高 程 的 突变 , 递到 A点 的 高程 变 化 仅 为 1 8 再 传递 到摊 铺 机传 感 器 设 传 /,
在清黄高速公路的路面施工实践 中, 通过详细的调查分析和比较后, 认 为: 在高等级公路施工 中, 以及在采用进 口摊铺机械 的情况下, 摊铺厚度 较 为容 易 控 制 , 对于 沥青 的 中、 面 层 , 高 程 误 差 经底 基 层 、 层 、 面 而 上 其 基 下
赫蕾地部分 牵引位墨 罐铺机惜感嚣设置 点
1规 范 要 求 及 施 工 中的 规 定
根据 《 公路 沥 青 路 面施 工 技 术 规 范》(TJ3 —9 ) 定 , 于铺 筑 高 J 02 4 规 用 速公 路和 —级公 路 的沥青混 凝 土摊铺 机应 具有 自动 或半 自动方 式调 节 摊铺厚 度 及找 平 的 装置 。 摊 铺 机 自动 找 平 时 , 、 面层 宜采 用 一 侧走 钢 丝 绳 引 “ 中 下 导 的高程 控制 方式 。 面层 宜 采用摊 铺层 前 后保 持相 同高差 的走 雪橇 方 式摊 表 铺厚 度 控 制方 式 … …” 清 黄和 凯麻 等 高 速 公路 也 正 是按 此 程 序控 制 的 。 。
中不致栽头, 而引起新铺路面上的深沟划痕 ()第三部分前后联接的梁体长度一般 1 2 刚度要大 , 3 0 1m, 但其重量 要适中, 因摊铺机的转感器触头与横梁为线接触, 横梁挠度的振动将引起传 感器 上得 到 上 下波 动 的信 息 ; 因 其重 量 由前 后 两个 地 点承 担 , 别是 后 而且 特 着地部分, 若承担的份量过重 , 已铺新路面的平整度不利 。 对
摊铺机自动找平研究的论文
摊铺机自动找平研究的论文摊铺机自动找平研究的论文一:绝对基准的找平方法。
绝对基准就是钢丝绳基准。
通过测量人员放样,测量,调整钢丝绳的高程变化来改变摊铺时的厚度变化。
假设钢丝绳的高程是绝对的准确的情况下,摊铺机按钢丝绳的高程找平不出现什么失误和故障,其他的工作流程也细致无误,那么修筑出的路面就肯定是条非常平整的路面。
摊铺后的路面实际高程与设计高程一致。
钢丝绳基准的找平方法。
刚丝绳找平方法大致可分为两种—滑竿和声纳传感器。
1滑竿:滑竿的找平是利用滑竿与钢丝绳的角度变化来改变摊铺厚度的。
1)调整初始仰角。
初始仰角的调整可以控制仰角油缸的升降范围,摊铺厚度越厚就要求越大的初始仰角,调整范围随各机型而定。
滑竿与钢丝绳的角度呈45度。
2)起步。
垫木方,木方的厚度最好与所要摊铺的厚度一样厚。
一般木方垫好之后熨平板的地板前方与后方的高差在0.5—1cm之间。
这样标尺仰角的位置就大致确定了。
3)摊铺工作。
摊铺工作时把控制器调整到自动状态,起步后摊铺的厚度可能和设计高程有一定的差距。
旋转仰角提升装置把厚度调整到工作所需厚度。
摊铺工作时确保滑竿在钢丝绳上行走,无杂物将滑竿托起。
4)路过桥面,旧路面的处理方法。
一般在铺筑水泥稳定土路面的时候要求摊铺厚度不能比桥面或者旧路面高。
在找平自动的情况下滑竿还搭在钢丝绳上,看控制器的红灯向上还是向下闪烁,这时需要手动调整标尺仰角向上或是向下直至灯灭为止,实现快速找平。
有时即使仰角降到最低而摊铺厚度还是厚,这时需要抬起熨平板使用人工顺桥面或路面。
这时需要把控制器调到手动档(有数字控制盒的也可以按动数字控制盒上的手动键,但切记不要归零重设)。
5)重新起步。
重新起步时就不需要再重调或者刻意记标尺仰角的位置了,滑竿直接搭在钢丝绳上,垫上木方控制器打到自动挡就可以了。
起步后会自动检测到原先的摊铺厚度。
在横接缝处使用这种方法很方便。
前提是检测厚度和调平升降装置没有变动,手动控制盒没有归零重设的情况下。
沥青混凝土摊铺机自动找平梁的原理分析及运用
·655·路桥建设Lu Qiao Jian She平整度是评价高等级公路使用质量的一个重要参数,因此平整度控制也是路面施工控制中的一个重要环节。
良好的平整度水平,来自于:①基底和各结构层的稳定性,无突变的、不均匀的沉降;②各结构层本身连续、均衡的压实度和平整度水平,较小的变异性;③施工工艺中,基准面的设定,沥青混凝土的拌和、摊铺、碾压,以及接缝处理等,各个环节的精细操作。
其中,如何在路面施工过程中,为摊铺机行走提供一个准确的平整度参照系,是达到良好的平整度水平的先决条件之一。
1 规范要求及施工中规定(1)根据《公路沥青路面施工技术规范》(JTJ032-94)规定,“用于铺筑高速公路和一级公路的沥青混凝土摊铺机应……:具有自动或者半自动方式调节摊铺厚度及找平的装置……”。
“摊铺机自动找平时,中、下面层宜采用一侧钢丝绳引导的高程控制方式。
表面层宜采用摊铺层前后保持相同高差的雪橇式摊铺厚度控制方式……”。
沈大和京津塘等高速公路也正是按此程序控制的。
(2)美国沥青协会《路面铺装手册》中提出,如果下面层已经非常接近容许误差,走雪撬也可以提供出光滑的面层。
在沪宁高速公路的路面施工实践中,通过详尽的调查分析和比较后,认为:在高等级公路施工中,及采用进口摊铺机械的情况下,摊最度较为容易控制;而高程误差经底基层、基层、下面层施工,已相对消除,对于中、上面层,平整度要求成为主要控制因素,高程要求相对次要;再之,一侧钢丝绳的引导对于灵敏度相对较高的进口摊铺机械来说,当然是不够的。
(3)因此建议各路面施工单位:一般情况下,对于全幅摊铺的摊铺机,只在基层上层和下面层摊铺时采用两侧钢丝绳引导控制方式,而中、上面层均可采用悬浮式基准梁的等厚度控制方式(即走雪撬)。
这样的施工控制方法,不仅来源于实践,而且基于以下分析。
2 原理分析(1)采用钢丝绳引导的高程控制方式,按有关规定,应采用直径2~2.5mm 的钢丝绳,200m 为一段,立杆间距10m,张紧力需800~1000N。
沥青混凝土摊铺机工作原理和路面平整度控制方法【最新】
沥青混凝土摊铺机工作原理和路面平整度控制方法沥青混凝土摊铺机是沥青路面施工的主要设备,由主机和熨平装置两大部分组成。
主机和熨平装置的技术性能、维修养护、施工工艺、质量控制以及操作人员的技术水平等因素均可影响沥青路面的密实度和平整度。
本文结合摊铺机主机功能和熨平装置工作原理,讲述沥青混凝土路面摊铺施工过程中,路面平整度的影响因素及控制方法。
关键词沥青混凝土摊铺机工作原理路面平整度主机结构及功能主机结构沥青混凝土摊铺机规格型号较多,各类型的摊铺机结构也不尽相同,但其结构一般由机架、动力系统(含发动机、液压传动系统)、行走系统、电控系统、收料输料系统(含前推辊、收料斗、刮板输料器、螺旋分料器)、调平系统、熨平装置等组成,如图1 所示。
上述结构中,除了熨平装置以外,均属于主机的主要组成部分。
主要功能主机的主要功能包括以下4 个方面:一是牵引摊铺机整体行走,并为摊铺机各个系统提供动力;二是通过主机前部的推辊推动运料自卸车行进,使其完成向收料斗卸料作业;三是通过刮板输送器和螺旋分料器将收料斗接收的混合料输送到摊铺宽度范围以内;四是连接并支撑熨平装置,为其液压回路提供动力,并可调整熨平板位置高度和作业角度。
熨平装置结构及工作原理结构熨平装置是沥青混凝土摊铺机的主要工作装置,通过主机两侧的提升缸和大臂与主机铰接在一起。
全功能的熨平装置由箱体、主熨平板(主板)、副熨平板(副板)、加宽熨平板(加长段)、刮料护板、端板、振捣机构、振动机构、厚度调节器、拱度调节机构、加热系统等组成,其示意图如图2 所示。
摊铺机主机后部及熨平装置前部均设有护板,熨平装置两端设有端面挡板,由此在熨平装置前部形成 1 个储存沥青混凝土的摊铺材料室。
其中端面挡板可使摊铺层获得较平整的边缘,可调高度的熨平板把混合料刮到预铺高度。
沥青混凝土经振捣夯锤振实后,在熨平板底面和振动器的共同作用下,形成具有一定密实度的沥青路面摊铺层。
以图2 中双振捣式振捣梁为例,其附有2 套振幅可调的振捣机构,即预振捣梁和主振捣梁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
沥青混凝土摊铺机自动找平梁的原理分析
平整度是评价高等级公路使用质量的一个重要参数,因此平整度控制也是路面施工控制中的一个重要环节。
良好的平整度水平,来自于:①基底和各结构层的稳定性,无突变的、不均匀的沉降;②各结构层本身连续、均衡的压实度和平整度水平,较小的变异性;③施工工艺中,基准面的设定,沥青混凝土的拌和、摊铺、碾压,以及接缝处理等,各个环节的精细操作。
其中,如何在路面施工过程中,为摊铺机行走提供一个准确的平整度参照系,是达到良好的平整度水平的先决条件之一。
1 规范要求及施工中规定
(1)根据《公路沥青路面施工技术规范》(JTJ032-94)规定,“用于铺筑高速公路和一级公路的沥青混凝土摊铺机应……:具有自动或者半自动方式调节摊铺厚度及找平的装置……”。
“摊铺机自动找平时,中、下面层宜采用一侧钢丝绳引导的高程控制方式。
表面层宜采用摊铺层前后保持相同高差的雪橇式摊铺厚度控制方式……”。
沈大和京津塘等高速公路也正是按此程序控制的。
(2)美国沥青协会《路面铺装手册》中提出,如果下面层已经非常接近容许误差,走雪撬也可以提供出光滑的面层。
在沪宁高速公路的路面施工实践中,通过详尽的调查分析和比较后,认为:在高等级公路施工中,及采用进口摊铺机械的情况下,摊最度较为容易控制;而高程误差经底基层、基层、下面层施工,已相对消除,对于中、上面层,
平整度要求成为主要控制因素,高程要求相对次要;再之,一侧钢丝绳的引导对于灵敏度相对较高的进口摊铺机械来说,当然是不够的。
(3)因此建议各路面施工单位:一般情况下,对于全幅摊铺的摊铺机,只在基层上层和下面层摊铺时采用两侧钢丝绳引导控制方式,而中、上面层均可采用悬浮式基准梁的等厚度控制方式(即走雪撬)。
这样的施工控制方法,不仅来源于实践,而且基于以下分析。
2 原理分析
(1)采用钢丝绳引导的高程控制方式,按有关规定,应采用直径2~
2.5mm的钢丝绳,200m为一段,立杆间距10m,张紧力需800~1000N。
假设钢丝绳的张紧力无限大,测量设定的铁立杆上标高绝对准确,则由路线两侧钢丝绳提供的基准面将是上一面层的绝对标准面。
但是,实际施工过程中,钢丝绳上所受的张紧力不可能无限大,而且因两侧路缘带上底基层、基层已硬化成型,承受张紧力的拉力支撑杆难以设置,规定800~1000N的张紧力也不能保证;再加上路面摊铺一天的工作量在1~2km甚至更多,其每天两条钢丝绳的测设任务相当艰巨;另外摊铺机行走过程中引发的钢丝绳振动难以消除,人为的触、碰及破坏更是难以避免,甚至可能发生因摊铺机方向走偏,熨平板刮挤拉线
桩的情况,使以钢丝绳引导的高程控制方式的准确性大打折扣。
(2)采用以雪撬式控制摊铺厚度的方式,是以下一面层为基准面,在摊铺机行走过程中,尽力减小其传递到上一面层的波动及突变误差,以
达到上一面层良好的平整度的目的。
其原理类似于杠杆,即将杠杆的支点安置于受外界因素影响较小的新摊铺层上,而下一层次的许多不平整因素被梁体结构分解、缩小若干倍,使传感器得到一个相对稳定或波动幅度较小的控制信号。
与上一方法比较,在下一层次的平整度良好的前提下,走雪撬的方法显然优于钢丝绳控制方法
(3)国外产的摊铺机均配有自动找平梁这一配件,但是因其价格高(约人民币35万元左右,如美国BLOW KNOX公司的浮动找平装置,售价34万元),且原理简单,所以沪宁高速公路路面施工单位大都采用自己加工生产的自动找平梁。
3 结构分析
从其结构看,单片自动找平梁主要由四个部分组成:一是前着地部分(轮式或雪橇板),二是后着地部分(一般两组雪橇板),三是前后的联接横梁,四是牵引横架。
前三个部分中各结点均采用可任意旋转的轴联接。
一般前着地部分至少由4组轮子(或雪橇板)组成,其中一个轮子若遇到高程的突变,传递到A点的高程变化仅为1/8,再传递到B点(摊铺机传感仪设置处)只有1/16甚至更小,如图2所示。
即若遇到一颗2cm 的石子,传递到摊铺机的反应装置时只有1~1.2mm,这对于摊铺机的平整度反应装置来说已微乎其微。
各路面施工单位自行加工生产找平梁的过程中,也遇到各种问题,后经协调组织、相互学习取经,均取得了满意的效益。
归结起来有以下几个技术要点:
(1)第一部分前着地部分的轮组运转灵活,轮径一般40~50cm为宜,不宜太小,否则其稳定性不足;
(2)第二部分后着地部分的雪橇板宜大,一般60cm×35cm有利于分散其承受的重量,应当注意,雪橇板上的支点应略向后置,使其在行走过程中不致栽头,向引起新铺路面上的深沟滑痕;
(3)第三部分前后联接的横梁长度一般10~12m,刚度要大,但其重量变适中,因摊铺机的传感仪触头与横梁为线接触,横梁挠度的振动将引起传感仪上得到上下波动的信息;而且因其重量由前后两个着地点承担,特别是后着地部分,若承担的份量过重,对已铺新路面的平整度不利;
(4)第四部分牵引装置为一横架,其连接摊铺机侧壁和找平梁的前端主体,在摊铺机行车过程中与摊铺机形成一个整体,需要有良好的刚度,防止振动(摇荡)前进的情况发生;
(5)就整体而言,整个自动找平梁的各结点及轮轴应摩擦力小,利于灵活运转;材料可选用轻质材料,若选用2~3mm厚的钢材加工成矩形截面梁体也可以,并且结构型式上参照桁架的设计方法,配以斜撑固定,加强其刚度,减少其中因自身振动引起的误差变化。
根据以上原理分析,及各路面施工单位的实践,各施工单位自己加工生产了形式多样的自动找平梁,一般花费不到10万元人民币,其质量和使用效果却与国外产品相当,完全可以取代进口的配件,并且已在沪宁高速公路路面施工中取得了良好的效果。