松下伺服故障及原因
松下伺服发生故障报警代码一览及对策

(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(4)排除缠绕因素。减轻负载。
(5)电磁制动器处于动作状态。
(5)测量制动器端子的电压。断开制动器。
(6)在复数台机械布线中,误将电机电缆连接到其它轴,错误布线。
(6)将电机电缆,编码器连线正确连接到各自的对应轴上。
(7)Pr5.12(过载等级设置)低。
(7)设定Pr5.12(过载等级设置)为0。
18
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
15
0
过热保护
驱动器散热器,功率元件的温度超过规定值以上。
(1)驱动器的使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载。
(2)提高驱动器,电机的容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过Pr5.12(过载等级设置)设定的过载水平时,根据后述时限特性激活过载保护。
以PANATERM的波形图形画面检查转矩(电流)波形是否发生振荡,是否上下晃动过大。通过PANATERM检查过载警报显示及负载率。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
松下伺服故障报警代码分析及处理

松下伺服故障报警代码分析及处理
一、报警代码
1.F10:输出电流检测点失效:
输出电流检测点是伺服控制器检测电机输出功率的重要指标。
出现这一报警的原因很可能是电机母线上的电流值没有正常检测到,或者控制器内部的电流检测电路出现故障,可能是放大器的结构失效,也可能是A/D 转换器的出错。
2.F11:DC组件过载
DC组件过载的报警指示DC电机运行台架上电机电流过载。
原因可能是电机处于锁死或粘连状态,电机容量不够,电机负载过大,或伺服控制器不正常检测电机负载过重。
3.F12:温度传感器信号异常
温度传感器信号异常报警指出,温度传感器的信号输出不正常。
原因很可能是温度传感器的电路失效,或伺服控制器内部的A/D转换器的电路失效,导致无法正常检测温度数值。
二、处理方法
1.F10报警处理方法
(1)检查电机母线是否处于正常状态,是否有破损或过载现象;
(2)检查控制器内部电机输出功率放大器是否正常;
(3)更换A/D转换器;
(4)重新调整控制器电机控制程序。
2.F11报警处理方法:
(1)检查电机是否出现锁死或粘连的情况;(2)检查电机的容量是否足够;。
松下伺服发生故障报警代码一览和对策
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3)改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱Biblioteka 器。130主电源电压不足保护(PN)
在接通伺服中,在主电源逆变器的P-N间电压低于规定值。
测量连接器(L1,L2,L3)的线间电压。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
(7)Pr5.12(过载等级设置)低。
(7)设定Pr5.12(过载等级设置)为0。
18
0
再生过载保护
再生能量超过再生放电电阻的容量。
(1)由于负载惯量大形成减速中的再生能量,导致逆变器电压上升,以及再生放电电阻的能量吸收不足导致异常检测值上升。
(1)检查运动图形(速度监控器)。检查再生放电电阻负载率及过再生警告显示。提高电机,驱动器容量,放缓减速时间,降低电机的转速,外附再生放电电阻。
松下伺服发生故障报警代码一览与对策

(2) 尝试将Pr5.09( 主电源关(2) 发生瞬间停电。
闭检测时间) 设定延长。
正确设定各相电源。
(2) 电源容量不足⋯受主电源接通时的冲击电流影响,导致电源(3) 提高电源容量。
电压下降。
(4) 正确连接电源的各相(3) 缺相⋯应输入三相规格的驱(L1 ,L2,L3) 。
单相100V及动器实际以单相电源运转。
单相200v 时,请使用L1,L3。
(4) 驱动器故障( 回路故障)(5) 更换新的驱动器。
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1) 驱动器故障(回路,IGBT部件不良)(1) 拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2) 检查电机电缆连接U,V,(2) 电机电缆U,V,W短路。
W是否短路,连接器导线是否有毛刺等。
正确连接电机电缆。
(3) 检查电机电缆的U,V,W (3) 电机电缆接地。
与电机接地线之间的绝缘电阻。
绝缘不良时请更换新电机。
140过电流(4) 检查电机的各条电缆间保护(4) 电机烧毁。
的电阻是否平衡,如不平衡,则需更换电机。
(5) 检查电机连接部U,V,W(5) 电机电缆接触不良。
的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6) 由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(6) 更换驱动器。
请勿通过接通,切断伺服进行运转,停止操作。
(7) 检查铭牌所示电机,驱动(7) 电机与驱动器不匹配。
器型号(容量) ,更换匹配驱动器的电机。
(8) 脉冲输入和接通伺服时序为(8) 接通伺服100ms以后,再同步,或脉冲输入过快。
输入脉冲。
(9) 动态制动器电路过热。
(9) 请勿用伺服On/Off 作为运转、停止使用。
高速运转时请设置动态制动器动作的停止时间为3 分钟左右。
141IPM 異常保護在逆变器上流动电流超过规定值。
(1) 驱动器故障(回路,IGBT部件不良)(2) 电机电缆U,V,W短路。
(3) 电机电缆接地。
(4) 电机烧毁。
松下伺服发生故障报警代码一览和对策
(1)负载过重,有效转矩超过额定转矩,长时间持续运转。
(1)加大驱动器,电机的容量。延长加减速时间,降低负载。
(2)增益调整不良导致振荡,振动。电机出现振动,异常声音。Pr0.04(惯量比)的设定值异常。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(4)更换新的驱动器。
13
1
主电源电压不足保护(AC)
在Pr5.08(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超过Pr5.06(伺服关闭时顺序设置)所定的时间。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(2)重新调整增益。
(3)电机布线错误,断线。
松下伺服驱动器故障报警内容和处理方法之欧阳学创编

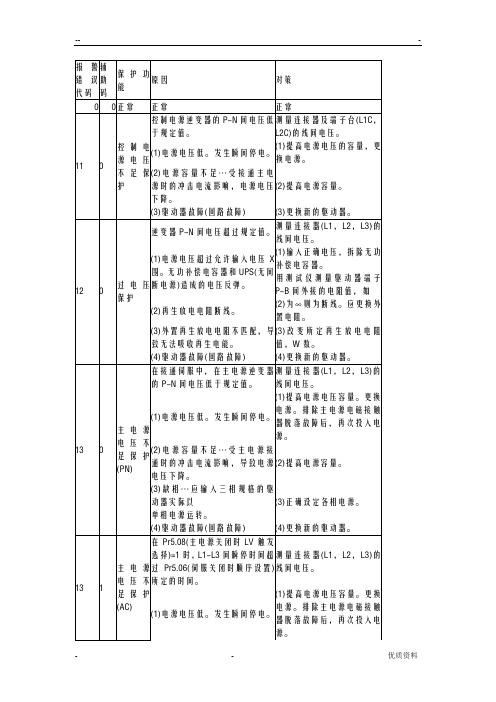
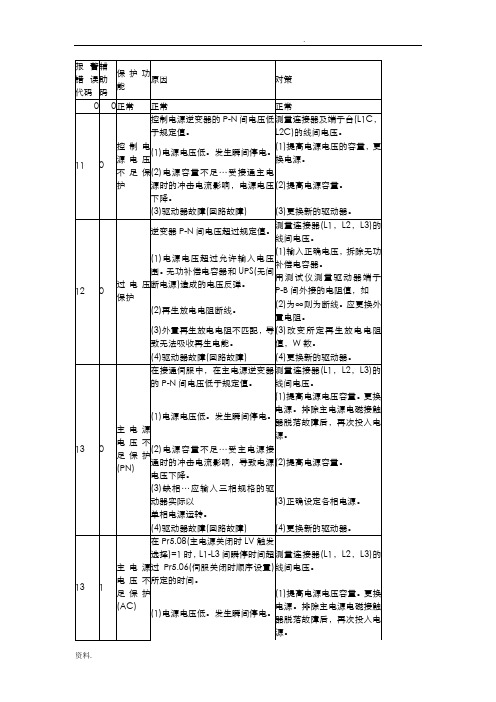
松下伺服驱动器故障报警内容和处理方法代码:11保护功能:控制电源欠电压故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12保护功能:过电压故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13保护功能:主电源欠电压故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
5)请换用新的驱动器。
代码:15保护功能:电机和驱动器过热故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。
松下伺服发生故障报警代码一览和对策
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
(6)更换驱动器。请勿通过接通,切断伺服进行运转,停止操作。
(7)电机与驱动器不匹配。
(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
(8)脉冲输入和接通伺服时序为同步,或脉冲输入过快。
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3)改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱动器。
13
0
主电源电压不足保护(PN)
在接通伺服中,在主电源逆变器的P-N间电压低于规定值。
测量连接器(L1,L2,L3)的线间电压。
报警错误代码
辅助码
保护功能
原因
对策
0
0
正常
正常
正常
11
0
控制电源电压不足保护
控制电源逆变器的P-N间电压低于规定值。
测量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压的容量,更换电源。
松下伺服驱动器故障报警内容和处理方法
松下伺服驱动器故障报警内容和处理方法在工业自动化领域,松下伺服驱动器以其出色的性能和稳定性得到了广泛的应用。
然而,在使用过程中,难免会遇到各种故障报警情况。
了解这些故障报警的内容以及掌握相应的处理方法,对于确保设备的正常运行和提高生产效率至关重要。
一、松下伺服驱动器常见的故障报警内容1、过电流报警(OC)当驱动器检测到电机电流超过设定的允许值时,会触发过电流报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
2、过电压报警(OV)电源电压过高或者在制动过程中产生的再生能量无法及时释放,都可能导致过电压报警。
3、欠电压报警(UV)供电电源电压过低,无法满足驱动器的正常工作要求,就会出现欠电压报警。
4、编码器故障报警(ENC)编码器是用于反馈电机位置和速度信息的重要部件。
如果编码器出现损坏、连接不良或信号干扰等问题,驱动器会发出编码器故障报警。
5、过热报警(OH)驱动器内部温度过高,可能是由于环境温度过高、散热不良、长时间过载运行等原因造成的。
6、位置偏差过大报警(Pd)当实际位置与指令位置的偏差超过设定的允许值时,会触发位置偏差过大报警。
7、速度偏差过大报警(Sv)实际速度与指令速度的偏差超出了规定范围,导致速度偏差过大报警。
8、通信故障报警(COM)驱动器与控制器之间的通信出现异常,例如通信线路中断、通信协议不匹配等。
二、松下伺服驱动器故障报警的处理方法1、过电流报警(OC)处理方法(1)首先检查电机是否过载,如果是,减轻负载或更换更大功率的电机。
(2)检查电机和驱动器之间的连接线路是否短路,修复或更换短路的线路。
(3)确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
(4)如果驱动器故障,需要维修或更换驱动器。
2、过电压报警(OV)处理方法(1)检查电源电压是否过高,如果过高,调整电源电压至正常范围。
(2)优化制动参数,确保再生能量能够及时释放。
可以考虑增加制动电阻或使用能量回馈装置。
松下伺服发生故障报警代码一览及对策
3
波形生成异常
指令脉冲值急速变化。
改小加速度、减速度的设定。
28
0
脉冲再生界限保护
脉冲再生的输出频率数超过界限。
检查Pr0.11(电机每旋转1次的输出脉冲数),Pr5.03(脉冲输出分频分母)的设定值。
将检测置于无效时,请将Pr5.33(脉冲再生输出界限设定)置于0。
29
0
偏差计数溢出保护
按位置指令脉冲,检查电机是否转动。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(2)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
单相电源运转。
(3)正确设定各相电源。
(4)驱动器故障(回路故障)
(2)提高电源容量。
(3)驱动器故障(回路故障)
(3)更换新的驱动器。
12
0
过电压保护
逆变器P-N间电压超过规定值。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压超过允许输入电压范围。无功补偿电容器和UPS(无间断电源)造成的电压反弹。
(1)输入正确电压,拆除无功补偿电容器。
松下伺服发生故障报警代码一览和对策
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(2)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)发生瞬间停电。
(2)尝试将Pr5.09(主电源关闭检测时间)设定延长。正确设定各相电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(3)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
27
3
波形生成异常
指令脉冲值急速变化。
改小加速度、減速度的设定。
28
0
脉冲再生界限保护
脉冲再生的输出频率数超过界限。
检查Pr0.11(电机每旋转1次的输出脉冲数),Pr5.03(脉冲输出分频分母)的设定值。
将检测置于无效时,请将Pr5.33(脉冲再生输出界限设定)置于0。
29
0
偏差计数溢出保护
编码器脉冲标准的位置偏差值,或者,光栅尺标准的全闭环偏差值超过2^29(536870912)。
辅助码
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、基本接线
主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);
控制电源输入r、t也可直接接~220V;
电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤
1.JOG试机功能
仅按基本接线就可试机;
在数码显示为初始状态‘r
0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;
按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;
按住‘<’键直至显示‘SrV-on’;
按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式
COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;
参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电) 调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式
COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;
PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);
PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;
参数No.02设置为0,No42设置为3,No43设置为1;
PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:
1.松下数字式交流伺服系统MHMA
2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?
这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.1 0、No.11、No.12,适当降低系统增益。
(请参考《使用说明书》中关于增益调整的内容)
2.松下交流伺服驱动器上电就出现22号报警,为什么?
22号报警是编码器故障报警,产生的原因一般有:
编码器接线有问题:断线、短路、接错等等,请仔细查对;
电机上的编码器有问题:错位、损坏等,请送修。
3.松下伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办?
伺服电机出现低速爬行现象一般是由于系统增益太低引起的,请调整参数No.10、No.11、No.12,适当调整系统增益,或运行驱动器自动增益调整功能。
(请参考《使用说明书》中关于增益调整的内容)
4.松下交流伺服系统在位置控制方式下,控制系统输出的是脉冲和方向信号,但不
管是正转指令还是反转指令,电机只朝一个方向转,为什么?
松下交流伺服系统在位置控制方式下,可以接收三种控制信号:脉冲/方向、正/反脉冲、A/B正交脉冲。
驱动器的出厂设置为A/B正交脉冲(No42为0),请将No42改为3(脉冲/方向信号)。
5.松下交流伺服系统的使用中,能否用伺服-ON作为控制电机脱机的信号,以便直接转动电机轴?
尽管在SRV-ON信号断开时电机能够脱机(处于自由状态),但不要用它来启动或停止电机,频繁使用它开关电机可能会损坏驱动器。
如果需要实现脱机功能时,可以采用控制方式的切换来实现:假设伺服系统需要位置控制,可以将控制方式选择参数No 02设置为4,即第一方式为位置控制,第二方式为转矩控制。
然后用C-MODE来切换控制方式:在进行位置控制时,使信号C-MODE打开,使驱动器工作在第一方式(即位置控制)下;在需要脱机时,使信号C-MODE闭合,使驱动器工作在第二方式(即转矩控制)下,由于转矩指令输入TRQR未接线,因此电机输出转矩为零,从而实现脱机。
6.在我们开发的数控铣床中使用的松下交流伺服工作在模拟控制方式下,位置信号由驱动器的脉冲输出反馈到计算机处理,在装机后调试时,发出运动指令,电机就飞车,什么原因?
这种现象是由于驱动器脉冲输出反馈到计算机的A/B正交信号相序错误、形成正反馈而造成,可以采用以下方法处理:
A.修改采样程序或算法;
B.将驱动器脉冲输出信号的A+和A-(或者B+和B-)对调,以改变相序;
C.修改驱动器参数No45,改变其脉冲输出信号的相序。
7.在我们研制的一台检测设备中,发现松下交流伺服系统对我们的检测装置有一些干扰,一般应采取什么方法来消除?
由于交流伺服驱动器采用了逆变器原理,所以它在控制、检测系统中是一个较为突出的干扰源,为了减弱或消除伺服驱动器对其它电子设备的干扰,一般可以采用以下办法:
A.驱动器和电机的接地端应可靠地接地;
B.驱动器的电源输入端加隔离变压器和滤波器;
C.所有控制信号和检测信号线使用屏蔽线。
干扰问题在电子技术中是一个很棘手的难题,没有固定的方法可以完全有效地排除它,通常凭经验和试验来寻找抗干扰的措施。
8.伺服电机为什么不会丢步?
伺服电机驱动器接收电机编码器的反馈信号,并和指令脉冲进行比较,从而构成了一个位置的半闭环控制。
所以伺服电机不会出现丢步现象,每一个指令脉冲都可以得到可靠响应。
9.如何考虑松下伺服的供电电源问题?
目前,几乎所有日本产交流伺服电机都是三相200V供电,国内电源标准不同,所以必须按以下方法解决:
A.对于750W以下的交流伺服,一般情况下可直接将单相220V接入驱动器的L1,L3端子;
B.对于其它型号电机,建议使用三相变压器将三相380V 变为三相200V,接入驱动器的L1,L2,L3。
10.对伺服电机进行机械安装时,应特别注意什么?
由于每台伺服电机后端部都安装有旋转编码器,它是一个十分易碎的精密光学器
件,过大的冲击力肯定会使其损坏。