一种基于DSP和CPLD的电动汽车驱动控制系统软硬件设计
基于DSP和CPLD的电能参数监测系统设计

Ab t a t P we u l y mo i rn e h oo y i t e h tp t o u r n e e r h i h e d o o e y tms a e n sr c : o r q ai nti g tc n lg s h os os f c re t r s a c n t e f l fp w r s se .B s d o t o i
de in sg .On h h r wa e ie, t y tm a e P nd CPLD s c r fp we a a ee t cin c rui, n o lx t e a d r sd he s se tk s DS a a o e o o r p rm trdee to ic ta d c mpe
摘要 : 电能质 量监 测技 术是 当前 电力 系统 领域 的研 究 热点 针 对 电 网三相 电压 及 电 流信 号 的 采 集 与 处理 , 计 了电 能质 量 检 测 装 置 的 数据 采 集 系统 , 设 系统 采 用DS 作 为核 心 处 理 器 。 P 完 成 了 多通道 数 据 采 集 、 据 处 理 、 盘 显 示 、 杂可 编程 逻 辑 控 制 器CP D与 单 片机 外 围接 口 数 键 复 L
中图 分 类号 : TH8 5 6 文 献 标 志码 : B
De i n o e t i we r m e e o t rng S s e Ba e n DS a sg f El c r c Po r Pa a t r M nio i y t m s d o P nd CPLD
基于DSP器件TMS320C32和CPLD芯片实现智能仪器的设计
基于DSP器件TMS320C32和CP1D芯片实现智能仪器的设计一、背景及DSP+CP1D系统优越性作为电气主设备,电动机是数量最多的一种,电动机及其保护的运行正常与否,直接关系到国计民生。
据统计,可靠的保护每年可减少约20万台(次)以上的电动机烧毁,减少经济损失数亿元。
传统智能仪器大多数都是在里出;机系统基础上开发的。
基于单片机的保护装置受其内部结构、时针和总线的限制,运算能力弱,实时性差,软硬件通用性不强,系统灵活性不高,日益不能满足上述需要。
DSP处蹴因内部采用了区别于传统单片机冯•诺依曼结构的哈佛结构而克服了取指令和数据都通过同一条总线完成而造成的传输通道瓶颈效应的问题。
可编程逻辑器件(P1D)经历了从PROM、P1A、PA1、GA1等低密度的P1D,发展到CP1D和空丛两种大规模的P1D,开发工具越来越完善,应用越来越普及。
将CP1D/FPGA和DSP技术的结合起来实现DSP器件系统的解决方案,为测控仪器向高层次智能化方向发展提供了充分的现实可行性。
为实现对电力系统大型设备智能在线监测,本文以WSM2000DSP智能电动机保护装置项目为背景,对一种DSP+CP1D新型的智能仪器结构进行了研究和设计。
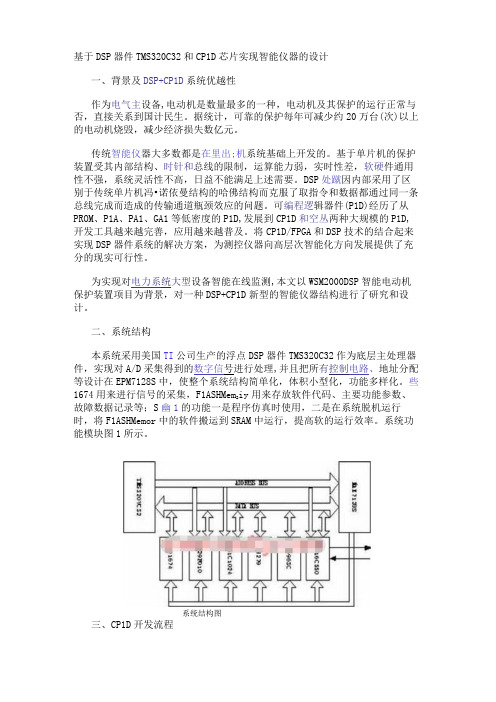
二、系统结构本系统采用美国TI公司生产的浮点DSP器件TMS320C32作为底层主处理器件,实现对A/D采集得到的数字信号进行处理,并且把所有控制电路、地址分配等设计在EPM7128S中,使整个系统结构简单化,体积小型化,功能多样化。
些iy用来存放软件代码、主要功能参数、1674用来进行信号的采集,F1ASHMem2故障数据记录等;S幽1的功能一是程序仿真时使用,二是在系统脱机运行时,将F1ASHMemor中的软件搬运到SRAM中运行,提高软的运行效率。
系统功能模块图1所示。
系统结构图三、CP1D开发流程CP1D的开发是指用利用CP1D芯片并借助于其开发系统,按照开发系统的工作步骤,将用户设计转化成CP1D配置数据并下载到CP1D芯片中实现用户设计要求的全过程。
一种基于DSP和CPLD的运动控制卡的设计
要 发送 的 脉冲 总数 存 入到 C L 的 寄存器 中,每 PD 周 期进 行 累加 ,采用 累 加器 的进 位 信号 作 为脉 冲 序 列 的来源 , 行 处理 ,得 到 驱动器 的指令 脉冲 。 进
1 运 动 控 制 卡 的硬 件 结 构
传统 的运动 控 制系统 一般 是基 于单 片机 的,
由于单片 机本 身执行 速度 的限制 ,其控 制轴 数 ,
4,
计算机技术应用
《 电技术》2 1 机 0 0年第 4期
以将 数 据 锁存  ̄ C L J P D中, 由主控 板 方便 读取 。 总线 收 发器 采用 7 AL CI 4 4 ,在 电路 中 4 V 625
使 之达 到 同步 要求 ¨。 J 从 实现 同步 的方案 来看 , 多轴 同步控制 已经 从传 统 的机械 共轴 传动 、机械 传动 链 实现转 向独 立传 动 、 电子传 动 链 的方式 。从控 制器 的实现 来 看, 模拟 电子控 制 已经基本 让位 于数字 电子控 制 , 随着 计算机 技术 和微 电子 技术 的发展 , 以微处 理 器为 核心 的数字 控制 系统 已经广 泛用 于运 动控 制 领域 。 目前 常用 的运 动控制 卡硬 件设 计方 法有 三
关 键 词 :运 动控 制卡 ; 多轴 同步 控 制 ; 并 行 总 线 ; 实 时性
中图分类号:T 2 3 文献标识码:A 文章编 号:17 —4 0 (0 00 —02 4 P 7 62 8 12 1)4 4 —0
多轴 系统 的控 制策 略关注 于 如何使 多轴 之 间 的运 动控 制有 机协 调起 来 ,达 到 系统整 体 的全局 性 能 的最优 化 是其最 终 目的。多轴 同步 控制 一般 有主 从式控 制 、多轴 联动 控制 等 。主从 控制 是指
基于DSP与CPLD的协调控制系统设计

• 115•研制了一种针对储能装置的协调控制系统,该系统是基于DSP+CPLD构成,采用DSP芯片TMS320F28335为核心,在逻辑电路中采用CPLD 芯片EPM570F256C5N来实现对系统开入开出量的监测及通信控制,DSP芯片通过总线与CPLD 芯片通讯连接。
使用DSP内部自带的12位A/D来完成16路电压和电流信号的采样,完成进线侧电压电流信息的采集及处理,同时监测BMS和储能整流模块的运行状态,完成同上级监控和本地监控的以太网通讯,以实现对监控系统和BMS、储能整流模块的协调控制。
1.引言大规模储能技术在很大程度上可以解决光伏发电、风电和分布式能源所面临瓶颈问题,可以实现新能源发电的平滑输出,成为代替常规机组调峰、调频的稳定可靠运行的经济而有效的手段(叶季蕾,薛金花,王伟,等.储能技术在电力系统中的应用现状与前景:中国电力,2014)。
目前国内外大规模储能装置的成本过高限制了储能技术的发展与应用,各种储能系统的协调优化技术都需要有新的突破(艾欣,董春发,储能技术在新能源电力系统中的研究综述:现代电力,2015)。
储能装置是一个复杂的通讯网络系统,目前其控制器通常采用传统的变流器控制板来实现。
传统的变流器控制板运行效率低,可靠性差且运用不够灵活,不能满足储能装置的通讯网络需求(仇志凌,基于LCL 滤波器的三相三线并网变流器若干关键技术研究:浙江大学,2009)。
为进一步改善储能装置的控制系统,本文提出了一种基于DSP 与CPLD 的储能装置协调控制器,响应速度快、可靠性高、且具有动态调节的能力,解决了传统储能装置控制板运行效率低、可靠性差的问题。
采用具有快速响应和动态调节能力的储能技术能够有效提高新能源电力系统的稳定性。
2.系统功能及结构本系统主要完成BMS 信息的采集及处理、装置进线侧电压电流信息的采集及处理、系统级的功率分配及策略控制、底层模块的开出控制、电池开关位置和交流侧开关位置等开入信息的采集以及同基于DSP与CPLD的协调控制系统设计许继电源有限公司 赵瑞霞 刘建鹏 吴道阳河南卷烟工业烟草薄片有限公司 吕新亮许继电源有限公司 胡占磊 王聪慧 王 锐上级监控和本地监控的通讯功能,以实现对储能监控系统和BMS 、储能变流模块的协调控制。
基于dsp和cpld的无刷直流电机控制器
基于dsp和cpld的无刷直流电机控制器基于dsp和cpld的无刷直流电机控制器摘要:基于DSP和CPLD的无刷直流电机三环控制系统采用先进DSP,利用CPLD实现无刷直流电机的逻辑换相,BLDCM的三环控制系统以位置环控制为主,以速度环和电流环控制为辅,并对数字电路以及功率电路进行了光耦隔离,确保了系统良好的电磁兼容性,在使用中,无刷直流电机三环控制系统具有稳定性等优点。
关键词:数字信号处理器; 无刷直流电机; 三环控制系统传统的BLDCM控制系统系统大多采用单环控制,具有一定的应用局限性。
基于DSP和CPLD的无刷直流电机三环控制系统使用了先进的数字信号处理器(DSP),并具有良好的电磁兼容性,在测试中使用控制软件对整个系统进行定周期控制,并循环等待中断发生等,测试结果说明无刷直流电机三环控制系统具有良好的性能,能够同时满足系统的快速性、稳定性与准确性的要求。
1.系统组成和工作原理1.1系统的组成基于DSP和CPLD的无刷直流电机根据电流驱动方式不同,分为正弦波无刷直流电机和梯形波无刷直流电机,无刷直流电机具有反馈简单、设计方便的优点,不需要采用绝对位置编码器或旋转变压器,能够充分发挥电机的功能潜力。
无刷直流电机的磁极具有多相绕组,利用逆变器进行轴位置检测。
无刷直流电机包括电动机、开关、和位置传感器三个部分。
1.2系统的工作原理基于DSP和CPLD的无刷直流电机的系统的定子是由永久磁钢组成的。
永久磁钢的能够在电动机的内部产生永久磁场,并能够在电枢绕组通电的情况下,发挥作用。
电刷具有换向的作用,能够保证两个磁场方向保持一直垂直,从而促进发动机的运转。
当电机在空载、过载和负载工况下时,电流不稳定,电流表指针摇摆不定。
出现这种状况的原因主要是因为电路中某一部分电阻值受热发生阻值变化而导致电流不稳。
对于这类故障,维修人员要对线路各个接触点进行排查,从而判断电刷和集电环装置是否出现短路现象从而导致接触不良,对于出现问题的部件要及时进行更换。
基于DSP和CPLD的运动控制器简化设计与应用

基 于DS 和 CP D的运 动 控 制 器 简化 设 计 与 应 用 P L
何 林 , 宪翠 , 孟 董 砚 , 高 洁
( 河北 工 业大 学 电气 与 自动化 学 院 , 津 3 0 3 ) 天 0 1 0
Absr c A meh d s e i n d f r h mut-un to d a o l x mo in c ntolr, b s d n t e DS t a t: to i d sg e o te li f ci n mo ulr c mp e to o r le a e o h P I / O s a e p c a d CPL n D.Usng t e rc d i h i h lO s a e o P n h o ru o i c pa iiis f p c f DS a d t e p wef ll gc a blte o CPLD ,t e r u e f t e DS bu a h e s o P s e n h b a hiv d e c e e .Co mpa e wih he r d to a moin o to lr t e i lfe moi n o r le sg iia ty e c s oh rd t t ta ii n l t c n rle , h smp i d o i to c ntol r i nfc n l rdu e b t t r wa e r s u c s a d t o he had r e o r e n he c mplxt ft to o tol r ti ra est e fe i iiy,r la iiy a e s tlt f e i o he mo in c nr le .I nce s h lx blt y e ib l nd v r aii o t y
基于DSP的永磁同步电机控制系统硬件设计
基于DSP的永磁同步电机控制系统硬件设计胡宇;张兴华【摘要】以小功率永磁同步电机(PMSM)为研究对象,结合数字信号处理器TMS320F2812功能特点,给出了一套PMSM驱动控制系统硬件设计方案.详细阐述了功率驱动主电路、反馈信号检测电路以及供电电路的设计,介绍了主要元器件选型和参数计算方法.基于设计的硬件平台,对PMSM调速控制系统进行了测试.试验结果表明,所设计的控制系统硬件设计可靠、性能稳定、控制精度高.%Based on the controlled object of small power permanent magnet synchronous motor (PMSM),combined with the main features of digital signal processor TMS320F2812,an overall hardware design scheme had been put forward for the PMSM drive control system.Design of the power driven main circuit had illustrated,signal detection circuit and power supply circuit in detail,meanwhile introduced the main components selection and parameters calculation method.Based on the designed hardware platform,the control system of PMSM had been performed a functional test.Experimental results showed that the hareware design of control system had good reliability with stable performance and high control precision.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)012【总页数】7页(P19-24,80)【关键词】永磁同步电机;功率驱动主电路;信号检测电路【作者】胡宇;张兴华【作者单位】南京工业大学电气工程与控制科学学院,江苏南京211816;南京工业大学电气工程与控制科学学院,江苏南京211816【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因其体积小、损耗低、功率密度高和效率高等优点,在机械制造、工业控制、航空航天等领域得到广泛应用[1]。
基于DSP+CPLD的四电动舵机伺服控制器设计
( 西北 工业 大学 , 陕西西安 70 2 ) 1 19 摘 要 :S D P具有强大 的事件管理 能力 , P D具 有高速 的逻辑运 算能力 。单个 D P配 以 C L CL S P D可以产生 多路
P WM波 , 完成 对四舵 机的伺 服控 制。软件 上 , S D P完成 A D采集 、I PD运算 以及 中断管理 , P D完成 多路 P CL WM的产 生以及实时保 护的功能。该控制 方式充分 利用 了 D P和 C L S P D的优点 , 既节约了成本 , 减小 了体积 , 也提 高了系统 的
触持电相 22 第 0 第8 0 年 4卷 期 l
… … … 一 .
驱动
… … … … … … … … … … … - … … … … … … … … ・ c - 锣 … 一
- T _…
…
一
…
…
…
…ห้องสมุดไป่ตู้
…
…
…
…
…
…
基 于 D P C L 的 四 电 动 舵 机 伺 服 控 制 器 设 计 S+ PD
t e c s ,e u e h y t m sz ,b tas mp o e h eib l y o e s se h o t r d c s t e s se ie u lo i r v s t e rla i t ft y tm. i h
K e wor s: li e ee ti a c u tr y t m ; e v o r l DS CPLD y d mutpl lc rc la t ao s s se s r o c nto ; P;
霍尔信号 回馈得知。单个 D P有 6 C P S 个 A 管脚 , 而 四台电机共有 1 2路霍尔信号需要捕获 。单纯依靠 D P的 C P管脚无法实现对 l 路霍尔的捕获。这 S A 2
用CPLD实现电动汽车驱动系统的逻辑控制
电机的正转和反转受司机台上的向前、向后信号 的控制。当向前信号有效时,要求电机输出正向转矩; 当向后信号有效时,要求电机输出反向转矩;当向前和 向后信号都无效时,要求电机不再输出转矩或停机。车 辆在高速行驶的时候,原则上不允许司机切换方向信 号。但是,为了确保车辆运行的安全,需要有一套完善 的逻辑来处理车辆在行驶过程中方向信号被改变这一 非常情况。既要实现在电机转速比较低的情况下方向 信号的正常切换,又要对电机转速较高时改变方向信 号这一错误情况作恰当的处理。
Mealy 型电路输出依赖于机器的当前状态和输入的值。 状态机的设计首先需要根据功能需求创建状态图或转 换表。例如状态图的创建一般从一个容易用文字描述 的状态开始,如果有复位状态,这往往是开始的好地 方。建议为创建的每个状态写一个详细的文字说明,以 便在随后的设计中作为参考,并为设计提供文档。状态 图的创建过程总是迭代的,状态描述可以随设计过程 而加以改进。创建了状态图或转换表之后,状态机的 V H D L 模型就很容易描述出来了。状态机的 V H D L 模型 通常被分为数据单元、控制单元和输出单元 3 个部分 (图 2 )。本文结合一个电机驱动系统逻辑控制的实例, 说明了状态机状态图的创建和V H D L 模型的描述过程。
如果以上程序中clock 的频率为 10 MHz,则能够滤 掉最宽为0.8 μs的毛刺。改变计数器的位数就可以改变 所滤毛刺的宽度,例如filter_cnt改为8位计数器,并把 filter_cn(t 7)传给forward_s作为滤波后的信号,则能够 滤掉最宽为12.8 μs的毛刺。 2.2 IGBT 过流保护
%92%8cCPLD的电动汽车驱动控制系统软硬件设计
一种基于DsP和cPLD的电动汽车驱动控制系统软硬件设计《中小型电机》2004,3l(1)
I控制参数设定l及变量初始化
I
随置DE叫撇l控制黼
II洲
l
l开放检测中断l和12中断
l
I钥鞘
关中断
+
转速计数值累加并决定本次转速值
●
蝌求电流妇
分量给定值
●
相电流,母线电压及温度采样
●
电流模型求
磁链位置角
+
ad嘏皿咄变换
●
求电压矢量的嘲分量并得出扇区
+
反Pa醒蚓戋橼电匿矢量的作用时间
●
殳置AcTR葛洲簧荸嚣生成刖卟啵形
●
开中断返回
图3主程序及12、r13中断服务程序流程图
其输出经一2.4Q滑线变阻器转换为相电流对应的电压信号。
'
.昌
专
襄
图4负载转矩为200N・m、给定转速为2000r/IIlin时的转矩和转速仿真波形
5结论
由上述实验及仿真结果可得出以下结论:
图5负载转矩为200N‘m、电机转速稳定在2000r/min时的线电压和相电流仿真波形(1)本文设计的基于F240和xC9536的矢量控制系统中各模块硬件分工明确,软件部分采用模块化设计,合理安排了各中断程序,并尽可能减少了软件开销,因而软硬件各模块能可靠完成
各自功能并很好地协调运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通讯模块包括与监控微机scI串行通讯模块 和与整车控制系统基于CAN总线(控制器局域 网)的通讯模块,实现驱动系统数据的传送及控 制指令参数的接收。控制器局域网是德国Rob— ertBosch公司在80年代初为汽车业开发的一种 串行数据通信总线,由于其具备良好的可靠性、健 壮性和性能价格比,因而得到了广泛的应用,使得 本系统的通讯组网能力强,数据传输可靠性高。
12V辅助电源是外加电源,它通过控制直流 进线继电器来控制直流母线电压的接入与开关电 源的启动,并为散热风扇和车灯供电。
值得指出的是本系统采用了基于现场集成技 术的复杂可编程逻辑芯片xC9536来进行外设的 寻址和最终实现变频器保护信号的输出,由于其 具有7ns的传输延迟、34个用户可用的I/O口、2 个功能块,内部连线和可编程资源较为丰富,因而 可以实现较为复杂的时序和组合逻辑,能迅速地 实现变频器的保护,也大大简化了系统的硬件设
《中小型电机》2004,3l(1) 一种基于DsP和cPLD的电动汽车驱动控制系统软硬件设计
57
一种基于DSP和CPLD的电动汽车驱动 控制系统软硬件设计
揭贵生,马伟明 (海军工程大学,武汉430033)
摘要根据中等容量异步电机空间矢量控制的特点,设计了一种基于16位定点数字信号处理器 TMs320F240和复杂可编程逻辑器件xc9536的矢量控制系统,并详细说明了其软硬件设计方法。实验 结果表明,该控制系统充分利用了TMs320F240和xc9536的硬件资源和特点,软硬件设计合理、实时性 较好,能可靠完成空间矢量控制算法。
1 引言
随着高能电池技术、现代电力电子技术、传感 器技术,微机处理技术、电机控制技术及现代控制 理论的发展,社会出于对日益严重的环境污染问 题的关注,目前使用汽油和柴油作为能源的传统 汽车将逐渐被电动汽车所代替。因此研究效率 高、响应快、调速范围广、安全可靠的电动汽车驱 协系统已成为必然。电动汽车的电机驱动系统一 般由四个主要部分组成,即控制器、功率变换器、 电动机及传感器。对驱动系统的所有这些要求都 集中体现在对功率变换器(通常为变频器)的控 制上,为满足这些要求,电动汽车驱动控制系统通 常采用矢量控制(FOc)或直接转矩控制(DTc)来 实现。本文根据课题研究实践,设计了一种基于 转子磁场定向的三相笼型异步电机空间矢量控制 系统,文中详细阐述了该系统的软硬件构成。
described in detail.The experimental I.esults show that the controlling system takes fuU advantages of the char— acteristics and the hardware resources of TMs320F240 and XC9536,has a weU dsigned sof¨are and hardware
关键词 空间矢量控制电动汽车复杂可编程逻辑器件
DSP跚Id CPLD-b蛾d Desij乒of瑚ectric
vIehicle D打代C10ntrol Sy贻洳
Jie Gllisheng,Ma WeiIIIing
Ak缸翟ct:According to the characteristics of medium—power induction motor vector control,a coห้องสมุดไป่ตู้trolling
驾驶控制器信号输入输出接口电路模块包括 电驾驶控制器控制信号输入接口电路和驾驶状态 信号输出接口电路,负责对汽车启动、加速、减速、 倒车、电池充电等控制信号进行检测,供F240进 行判断处理,同时根据驱动系统运行情况输出车 灯信号、风扇信号等状态控制信息。
电源模块负责控制系统和IPM模块的供电, 采用开关电源实现,具有体积小、容易实现多路输 出(本系统中设计了10路)和可靠性较好的优 点。在本系统中,为防止IPM模块间相互干扰, 给每个模块单独供电,并且数字系统电源、A/D 基准电压、通讯模块电源(均为5V)分开,提高了 系统的抗干扰能力。
麟0做A/D转换前由肖特基箝位二极管阵列
SN74S1051进行降噪处理。电流传感器采用了 Honeyweu公司基于PcB板安装的开环电流传感
器CsLA2EM,其最大采样电流±765A、转换时间 不大于3us且工作温度范围宽,可以满足本系统 要求。由于电动汽车工作环境恶劣,为提高电机 转速传感器工作可靠性,采用了一种每转输出60 个脉冲的磁电式速度传感器,其输出2路正交信 号经施密特触发器整形后由F240进行计数,其测 速精度可通过适当增大测速周期实现(本系统中 取为5ms,并采用变M/T法)。
system based on 16一bit fixed point digital signal pmcessor(DSP)TMS320F240 and complex programmable logic device(CPLD)XC9536 is designed in this p印er,and the designed method of softwaI.e arld hardware is
在本控制系统中,采用转速、电流双闭环的控 制方案,F240作为控制核心,不仪要对控制电路 的各环节进行管理、协调和监督,而且还要进行较 为复杂的矢量控制运算,由于本系统的控制是属 于快速性要求较高的实时控制范畴,这就要求系 统的采样周期尽可能短,根据对变频器的损耗及 散热计算和对尽可能抑制谐波的折衷,系统载频 固定为10kHz,F240工作频率取为20MHz。由于 要求在100us内完成一次SVPWM算法,则系统 主控程序指令(sVPWM程序)必然控制在1000 条以内,这一方面要合理利用中断减小软件开销, 另外为提高编译效率,主控程序必须用汇编语言 编写,并且为减小计算量,对一些矢量算法中需要 通过运算得到的常量,如三角函数表、空间矢量6 个扇区各对应的两个空间电压矢量组成的矩阵的 逆矩阵、额定及设定参数等要预先运算好存入程 序区或数据区。
4仿真及实验结果
本文对基于上述系统结构的驱动系统进行了 仿真和原理样机实验,电机为自制电机,额定功率 45kw,额定转速2000r/min,转动惯量7.3lk· m2,变频器直流母线额定电压336V,图4中从上 至下分别是负载转矩为200N·m、给定转速为 2000r/min时的转矩和转速响应仿真波形,图5中 从上至下分别为线电压仿真波形和相电流仿真波 形,图6、图7分别为电机转速稳定在2000r/n·in 时的变频器输出实测相电流对应电压波形和线电 压波形。其中实测线电压用电阻分压取实际值的 l/10,实测相电流采用变比为300:5的互感器,
控制系统的核心采用TI公司的16位定点电 机调速专用DsP芯片TMs320F’240,尽管其矢量 控制的数学运算必须通过定标来实现浮点运算, 但由于其片内集成了16K字FlAsH、544字双口 RAM、16路10位模数转换模块、串行通信接口、 SPl接口,特别是集成了可编程死区功能的12路 比较/脉宽调制通道的事件管理器模块和测速用
在本系统中主要用到了5个中断:它们是通 用定时器T1的全比较中断(作矢量控制运算生 成6路PwM信号)、定时器眨中断(用于正交编 码测速)、定时器够中断(用于对系统控制电路 状态监控,并决定是否启动或关闭电机)、功率驱 动保护中断和串口中断。
为了编程时做到条理清楚,不易出错,程序尽 可能采用模块化设计。特别是通用定时器T1的 全比较中断服务程序,由于控制算法较为复杂,将 其分解为电流A/D采样模块、测速模块、clark变 换模块、Park变换模块、电流模型模块、PI调节模 块、速度及电流调节模块、反Park变换模块、弱磁 控制模块等。图3分别给出了主程序及耶、他中 断服务程序软件流程框图。
2控制系统硬件设计
图1所示为系统硬件总体框图,系统由高能 电池组、高效三相电压型变频器、三相笼型电机、 变频器IPM模块门极信号隔离驱动电路、DsP最 小系统、电源模块、辅助电源、信号A/D检测接口 电路及电机转速检测接口电路模块、通讯模块及 驾驶控制器输入输出信号接口电路模块组成。整 个系统具有体积小、重量轻、结构简单紧凑、效率 高、响应快、调速范围广、保护功能强等特点。
【A IB lC
图2基于xc9536的变频器保护时序仿真波形
3 SVPWM控制系统软件设计
空间电压矢量法以三相对称正弦波电压供电 时交流电动机的理想圆形磁通轨迹为基准,用逆 变器不同的开关模式产生实际磁通逼近基准磁通 圆,从而达到较高的控制性能。它具有直流电源 利用率高(较sPwM高出15%)、电流畸变率低和 便于微机(特别是用7rMS320砣40)实现的优点。 本系统中三相逆变器的8种开关模式分别对应8 个空间矢量,SVPWM就是控制这些基本空间矢 量的组合,使输出电压空间矢量按设定的参数圆 旋转。在每个扇区用两个非零矢量和一个或两个 零矢量合成一个等效的电压矢量,可以通过查表 实现。在模式转换时保证只有一个功率器件状态 发生变化,使得每个控制周期内开关次数最少。
置黝0全比较控制寄存器AcTR即可自动实现,
从而在一定程度上简化了主控软件的设计。由它 和64K16位高速SRAM芯片IDrl71016以及 cPLD芯片xC9536构成DsP最小控制系统,负责 系统软件的装载、运行及数据交换。
信号A/D检测接口电路及电机转速检测接 口电路模块是控制系统最重要接口电路,它包括 三相电流及变频器温度检测接口电路、电机转速 及温度检测接口电路、直流母线电压检测接口电 路,负责对变频器输出三相电流、变频器和电机温 度、直流母线电压进行A/D检测前的预处理(主 要是用光耦、运放、电压比较器进行隔离、电平转 换和比较以产生保护输入信号)以及对电机2路 转速信号进行整形,F240进行A/D转换后结合 转速检测值及设定值进行矢量控制运算,并与 xc9536共同用这些状态信号实现变频器过流、过 压、欠压、过热、电机过热等保护功能。由于变频 器直流母线电压不可避免存在较大干扰,因此使 用了隔离运放HCPL7800对直流母线电匝进行 A/D前的电平转换,并且所有检测信号在送至