路面不平度的统计特性
路面不平度研究综述

2、不平度建模方法
目前常用的不平度建模方法包括神经网络、支持向量机、回归分析等。这些 方法在不同程度和角度上对不平度进行了建模和预测,取得了一定的成果。例如, 神经网络方法能够模拟人脑对于路面不平度的识别过程,支持向量机则能够有效 地处理小样本数据等。
3、不平度预测精度评估
为了评价建模方法的优劣,需要对不平度预测精度进行评估。精度评估的指 标包括平均绝对误差、均方根误差等。在实际应用中,应根据具体需求选择合适 的评估指标,并对建模方法进行优化以提高预测精度。
结论
本次演示对路面功率谱密度换算及不平度建模理论进行了研究。首先,分析 了路面材料参数、厚度以及维护情况对路面功率谱密度的影响;其次,介绍了不 平度的定义及其影响因素,并探讨了不平度建模的常用方法;最后,针对不同建 模方法进行了精度评估并提出改进意见。
感谢观看
(3)耐久性:路面不平度可能导致车辆颠簸、磨损等问题,缩短车辆的使 用寿命,增加维修费用。
3、路面不平度的测量方法和技 术
为了准确评估路面不平度,需要采用合适的测量方法和技术。目前常用的路 面不平度测量方法包括:
(1)水准测量法:通过水准仪测量路面标高差,从而计算路面不平度。该 方法精度较高,但效率较低。
2、路面不平度的影响和危害
路面不平度对于车辆的行驶性能、安全性和舒适性具有重要影响。主要表现 在以下几个方面:
(1)安全性:路面不平度可能导致车辆颠簸、失控等问题,影响驾驶员的 视线和操控稳定性,增加交通事故的风险。
(2)舒适性:路面不平度可能导致车辆振动、噪音等问题,影响乘客的舒 适度,降低道路的使用体验。
路面厚度是影响路面功率谱密度的另一个重要因素。随着路面厚度的增加, 路面对车辆的冲击和振动能量的吸收能力也会增强,从而使路面功率谱密度减小。 因此,在路面设计和维护中,需要考虑路面厚度对功率谱密度的影响。
汽车理论思考题及其部分答案

汽车理论考虑题 20211. 汽车动力性的评价指标及定义【定义:汽车在良好路面上直线行驶时由汽车受到的纵向外力决定的,所能到达的平均行驶速度。
评价指标:最高车速 加速时间 最大爬坡度】2. 应用汽车的行驶方程求取动力性指标的方法。
3. 比较三种不同形式的汽车行驶方程的异同。
4. 汽车的驱动力图,驱动力—行驶阻力平衡图,动力特性图及功率平衡图的绘制方法。
5. 发动机特性曲线有哪几种?[部分负荷特性曲线 速度特性曲线]6. 汽车的驱动附着条件。
[作用在驱动轮上的转矩产生的地面切向反作用不能大于附着力]7. 滚动阻力产生的原因。
【轮胎与路面接触区域产生的法向、切向互相作用力】8. 空气阻力由哪几部分组成?【压力阻力:形状阻力、干扰阻力、内循环阻力、诱导阻力 摩擦阻力】9. 不同驱动形式汽车由地面决定的最大等效坡度。
[后驱L h L a q g -=ϕ 前驱 L h L b q g +=ϕ ]10. 在加速上坡时,四轮驱动汽车前、后轮的转矩如何分配,才能充分利用地面附着条件?【后轴转矩分配系数t2 t1t2T T T +=ψ】11. 画出驱动轮在匀速和加速运开工况下的受力图,并推导地面切向力的表达式。
12. 汽车燃油经济性的评价指标。
【汽车行驶百公里的燃油消耗量、一定燃油量能使汽车行驶的里程。
】13. 汽车等速百公里油耗的计算方法。
【Qs= P e U a ρg 】14. 发动机负荷率与汽车燃油经济性的关系。
【负荷率越高,燃油经济性越高】15. 我国规定商用车、城市客车以及轻型汽车测定燃油经济性分别采用哪种循环行驶工况?16. 要节省燃油消耗,应如何选择行驶车速和挡位,为什么?【接近低俗的中等车速 高档位】17. 什么是发动机的负荷特性曲线?万有特性曲线?【发动机的转速不变时,其性能指标随负荷的变化关系18. 利用发动机最小燃油消耗特性分析无级变速器省油的原因。
【〔1〕把各功率下最经济工况运转的转速与负荷率标明在外特性曲线图上便得到最小燃油消耗特性 〔2〕无级变速器应有的传动比i 与发动机转速n 及汽车行驶车速关系如下其中A 为常数,根据Pe=〔Pf+Pw 〕/T 由最小燃油消耗曲线可以求出发动机经济的工作转速ne ,将ua 、ne 带入上式,就得到无级变速器应有的传动比i 在同一值的路面上,不同车速时无级变速器应有的i 连成曲线就得到无级变速器的调节特性】19.混合动力电动汽车节油的主要原因?【①为了满足急加速、以很高车速行驶行驶与快速上坡对驱动功率的要求,传统的内燃机汽车所装备的发动机功率往往相当很大②在汽车停车等候或低速滑行的等工况下关闭内燃机,几月燃油③利用发电机回收部分制动能量】20.确定传动系最大传动比主要考虑哪些因素?【最大爬坡度,附着率及汽车最低稳定车速】21.确定货车的功率与轿车的功率的方法有什么不同?22.为什么减小最小传动比可以进步汽车的燃油经济性?23.传动系各挡传动比理论上应怎样分配?实际上又是按什么原那么分配的,为什么?【按等比级数分配传动比1〕保证换挡平顺,无冲击2〕充分发挥发动机功率,功率利用区域大3〕有利于进步汽车的动力性。
5.4 路面不平度统计特性
其中: 、输出谱矩阵的对角线元素为输出信号的自功率谱。 其中:1、输出谱矩阵的对角线元素为输出信号的自功率谱。对 输出信号的自功率谱进行积分才能得到输出信号的均方值。 输出信号的自功率谱进行积分才能得到输出信号的均方值。 2、频率响应函数的谱矩阵中,各元素分别为单输入系统的频响函 、频率响应函数的谱矩阵中,各元素分别为单输入系统的频响函 单输入系统 求解此频响函数时,可令其它输入信号为0。 数,例如 H z ~ q ( f ) ,求解此频响函数时,可令其它输入信号为 。
5.4 路面不平度统计特性
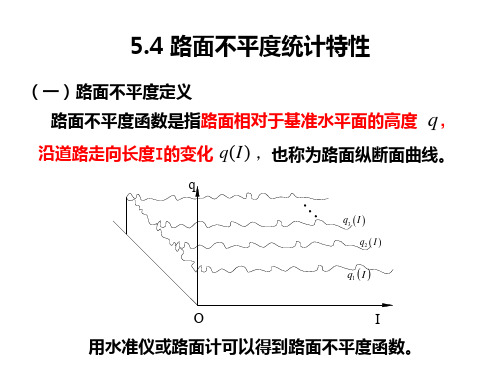
(一)路面不平度定义 路面不平度函数是指路面相对于基准水平面的高度 路面不平度函数是指路面相对于基准水平面的高度 q , 沿道路走向长度I 沿道路走向长度I的变化 q ( I ) ,也称为路面纵断面曲线。 也称为路面纵断面曲线。 也称为路面纵断面曲线
q
q3 ( I )
q2 ( I )
双对数坐标系
2)空间频率下路面不平度的速度功率谱和加速度功率谱 空间频率下路面不平度的速度功率谱和加速度功率谱 由不平度函数q(I 对纵向长度 对纵向长度I 由不平度函数 I)对纵向长度I的一阶导数和二阶导 可得空间频率的速度功率谱和加速度功率谱。 空间频率的速度功率谱和加速度功率谱 数,可得空间频率的速度功率谱和加速度功率谱。
∆f = u∆n
对车辆平顺性有效的路面波长 通常在 0.35m < λ < 91m
−1 0.011 −1 即频率: m < n < 2.83m 即频率:
思考:有效的路面波长如何确定? 思考:有效的路面波长如何确定? 常用车速:36~ 常用车速:36~108km/h u=10~ 即u=10~30m/s 所以,可以保证时间频率范围 所以,可以保证时间频率范围 保证 0.33~28.3Hz, 0.33~28.3Hz,其覆盖车身质量部 分的固有频率1 2Hz和车轮质量部 分的固有频率1~2Hz和车轮质量部 分固有频率10~15Hz。 分固有频率10~15Hz。 10
路面不平度的统计特性-
G42 n G2*4 n Gyx n
16
第二节 路面不平度得统计特性
左、右轮迹间得互谱可以表示为
Gxy n Gxy n e jxy n
两个轮迹得相关函数为
coh
2 xy
n
Gxy n 2 Gxx nGyy n
侧倾角位移功率谱密度Gθ(n)与垂直位移功率谱密度 Gq 得n
比值与相干函数 cohxy n得 关系为
路面不平度的统计特性
第二节 路面不平度得统计特性
一、路面不平度得功率谱密度
1.路面不平度函数
➢路面相对基准平面得高度 q ,沿道路走向长度 I 得变化 q(I)称为路面不平度函数。
➢用水准仪或路面计可以得到路面不平度函数。
2
第二节 路面不平度得统计特性
2.路面不平度得功率谱密度 Gq (n)
1) Gq (n得) 拟合公式
Gq f 2πf 2 Gq f 4π2Gq n0 n02u
Gq f 2πf 4 Gq f 16π4Gq n0 n02uf 2
10
第二节 路面不平度得统计特性
Gq f Gq n0 n02
u f2
对上式得等 式两边取对数 后作图,得到位 移功率谱密度。
u Gq(n0)
Gxy n Gyx n cohxy nGq n
路面对四轮汽车输入得谱矩阵最后可以表示为
1
Gik
n
Gq
n
e j2πnL
coh n
coh
n
e
j2πnL
e j2πnL
1
coh n e j2πnL coh n
coh n coh n e j2πnL
1 e j2πnL
coh n e j2πnL
路面谱

几何平 均值 上限
A B C D E F G H
8 32 128 512 2048 8192 32768 131072
16 64 256 1024 4096 16384 65536 262144
32 128 512 2048 8192 32768 131072 524288
表8-1列出了各组路面不平度系数 Gq (n0 ) 的范 围及其几何平均值,表上还列出了 0.001m1 n 2.83m1 范围路面不平度相应的均方根值的数值。
路面 等级
Gq (n)(106 m 2 / m 1 ) n0 0.1m 1
下限 几何平 均值 上限 下限
q (103 m)
Gq ( f ) Cn1 v 此式说明,车速提高后Gq ( f ) 值变小,激励变弱,
在 n1 n n2 主频带区(波长小于0.3m),由式(8-4) 和式(8-3)得 1 2 1 f 2 Cv (8-5) Gq ( f ) Cn C ( ) 2 v v v f 此式说明,在一定频率时 Gq ( f )随车速而增大,激励强 度也增大,故在主频带区,车速不宜高,由此可见, 不同频区车速的影响是不同的,随着频率的提高,激 励的作用将逐步减小,国外学者提议研究汽车振动的 1 路面激励频率定在 n 0.01 ~ 10m 范围内。上面只讨 论了一个车轮的自谱,如果考虑前,后轮两个输入时 还要考虑两个输入之间的互谱问题,假定前,后车轮 同走一个车辙,则后轮只是比前轮滞后一段长度(轴 距),而左,右两轮迹之间不平度的统计特性,用它 们之间的互功率谱密度函数或相干函数来描述。
1984年国际标准协会在文件ISO/TC108/SC2N67中提出 的“路面不平度表示方法草案”和我国国标都采用路 面功率谱密度描述其不平度的统计特性,而且建议路 面功率谱密度用下式表示: n (8-1) Gq (n) Gq (n0 )( ) n0 1 m ; 式中 n ——空间频率,它是波长 的倒数, 1 m n0 ——参考空间频率, n0 =0.1 ; Gq (n0 ) ——在 n0 频率时的路面谱值,称路面不平度 2 1 系数,m / m ; ——频率指数, =2 。
路面不平度数值模拟研究报告
路面不平度的数值模拟研究[摘要]在汽车设计开发过程中,常需要预测、研究汽车零部件在时域内振动响应,于是在系统参数已知的情况下,需要即需有公路路面的随机不平度数据。
本文研究了一种公路路面不平度的数值模拟新方法,即直接对已知路面不平度的功率谱密度经过一系列处理获得路面的不平度值,研究表明所得路面不平度数据的功率谱密度与所要求的准确一致,并且这种方法简洁实用、便于操作。
关键词:功率谱密度;路面不平度;傅立叶变换;采样1、引言汽车以一定的速度行驶时,路面的随机不平度通过轮胎、悬架等传递到车身上,并通过座椅将振动传递到人体。
当把汽车近似为线性系统处理时,得到了路面不平度功率谱以及车辆系统的频响函数,就可以求出各响应物理量的功率谱,从而可分析车辆振动系统参数对各响应物理量的影响和评价平顺性。
然而,汽车振动系统中包括许多非线性元件,如轮胎(有可能离地>、渐变刚度悬架、液力减振器、橡胶减振块及悬架的干摩擦阻尼等。
为获得更准确的结果,特别是在进行振动幅度较大的汽车可靠性等研究时,需采用非线性振动模型⑴。
对于非线性系统,线性系统中熟知的叠加原理不再成立,不能直接采用频域方法进行研究,只能在时域中进行研究。
另外,最近主动、半主动控制悬架的研究已经了人们充分重视,控制系统的反馈信号是时域信号,所以在进行控制策略研究时,也只能在时域中进行。
对于这两类问题,所需的路面激励是时域或空间域信号,而非频域信号。
获得路面随机不平度的方法有两种,一种是实验测试,一种是将路面不平度的功率谱密度变换为空间域激励函数,近年来受到了广泛重视[1-4]。
1984年国际标准化组织在文件ISO/TC108/SC2N67中提出了路面不平度的功率谱密度表达式模型和分等方法。
1986年,中国学者在进行了大量研究的基础上,也提出了类似的表达式和分等方法,制订了相应的国家标准,即GB7031- 86《车辆振动输入一路面平度表示方法》。
对于路面不平度空间域(或时域>内的问题,各国学者进行了大量研究,早期的研究方法有谐波叠加法(或称三角级数合成法>,该方法的基本思想是将路面不平度表示成大量具有随机相位的正弦或余弦之和。
汽车理论第六章答案

6-1 人体对振动的反应和平顺性的评价
一、人体对振动的反应
97标准用加速度均方根值给出了1~80Hz振 动频率范围内人体对振动反应的三个不同 界限。反应界限(疲劳、不舒服)都是由 人体感觉到的振动强度大小和暴露时间长 短综合作用的结果。
暴露界限 疲劳-工效降低界限 舒适降低界限
6-1 人体对振动的反应和平顺性的评价
∫
2)均方值
T 2 T − 2
q (t )dt
T 2 T − 2
1 2 E q (t ) = μ q = lim T →∞ T 3)方差
[
]
∫
q 2 (t )dt
σ q2
1 = lim T →∞ T
∫ [q(t ) − μ ] dt
T 2 T − 2 2 q
随机过程统计基础知识
q(t)的5种数字特征: 4)自相关函数 1 Rq (t ) = lim T →∞ T 5)谱密度函数
⎡ T a 4 (t )dt ⎤ VDV= ∫ w ⎢0 ⎥ ⎣ ⎦
1 4
ms
−1.75
第六章 汽车的平顺性
§6-2 路面不平度的统计特性
主要内容:
1. 功率谱密度(PSD)-平均能量的谱分布。 2. 空间频率与时间频率的关系。 利用输入的路面不平度功率谱以及车辆系统的频 响函数,可以求出各响应物理量的功率谱,用 来分析振动系统参数对各响应物理量的影响和 评价平顺性。
§6-3 汽车振动系统的简化,单 质量系统的振动
一、汽车振动系统的简化 1.四轮汽车简化的立体模型
汽车的悬挂质量为:m2(车身、车架等) 汽车的非悬挂质量:m1(车轮、车轴) 汽车共7个自由度:
车身垂直、俯仰、侧倾3个自由度 车轮4个垂直自由度
汽车理论 路面不平度的统计特性

速度功率谱密度 Gq(n) (2πn)2Gq(n) 加速度功率谱密度
Gq (n) (2πn)4Gq (n)
当W=2时
Gq(n) (2πn0 )2Gq(n0 )
与n无关——“白噪声”
7
第二节 路面不平度的统计特性
二、空间频率功率谱密度Gq (n)化为时间频率功率谱密度Gq (f )
车速
Gq (n) Gq (f )
16384 65536 262144
σq /(10-3m) 0.011m-1<n<2.83m-1
几何平均值 3.81 7.61 15.23 30.45 60.90 121.80 243.61 487.22
5
第二节 路面不平度的统计特性
路面不平度分级图
6
第二节 路面不平度的统计特性
3)速度功率谱密度和加速度功率谱密度
lim Gq
f
2 q ~Δn
Δf 0 Δf
将f un 代入
Gq
பைடு நூலகம்
f
lim
2 q~Δn
Δn0 uΔn
1 u
Gq
n
9
第二节 路面不平度的统计特性
空间频率和时间频率谱密度的关系
f 1 n 2
2
Gq(f)
时间频率谱密 度Gq(f)
1 1 2
Gq (n) 1
f n
f 2n
f
Δn n
空间频率谱 密度Gq(n)
对上式的等 式两边取对数 后作图,得到 速度功率谱密 度。
u
Gq(n0)
13
第二节 路面不平度的统计特性
Gq f 16π4Gq n0 n02uf 2
对上式的等 式两边取对数 后作图,得到 加速度功率谱 密度。