功能指令(一)
功能指令例题

功能指令例题
例题1设有8盏指示灯,控制要求是:当X0接通时,全部灯亮;当X1接通时,奇数灯亮;当X2接通时,偶数灯亮;当X3接通时,全部灯灭。
试设计电路并用数据传送指令编写程序。
例题2电动机Y-△降压启动控制线路与程序
例题3 台设备具有手动/自动两种操作方式。
SB3是操作方式选择开关,当SB3处于断开状态时,选择手动操作方式;当SB3处于接通状态时,选择自动操作方式,不同操作方式进程如下:
手动操作方式进程:按启动按钮SB2,电动机运转;按停止按钮SB1,电动机停机。
自动操作方式进程:按启动按钮SB2,
电动机连续运转1min后,自动停机。
按停止按钮SB1,电动机立即停机。
例题 4 单按钮的功率控制线路如图所示。
控制要求是:加热功率有7个挡位可调,大小分别是0.5kW、1kW、1.5kW、2kW、2.5kW、3kW和3.5kW。
有1个功率选择按钮SB1和1个停止按钮SB2。
第一次按SB1选择功率第1挡,第二次按SB1选择功率第2挡……第八次按SB1或按SB2时,停止加热。
例题 5 某台设备有两台电动机,受输出继电器Y0、Y1控制;设手动、自动1、自动2和自动3四挡工作方式;使用X0~X4输入端,其中X0、X1接工作方式选择开关,X2、X3接启动/停止按钮,X4接过载保护。
在手动方式中采用点动操作,在3挡自动方式中,Y0启动后分别延时10s、20s、和30s后再启动Y1,用接点比较指令编写程序和分析程序。
第5章 三菱FX 2系列 PLC的功能指令 1

5.3.6 块传送指令 2 图5.29(a)为块传送指令示例梯形图,对应指令为: BMOV D0 D10 K3。
在图5.29(a)中,如X010接通,执行块传送指令。K3 指定数据块个数为3,将D0~D2内容传送到D10~D12 ,如图5.29(b)。当源、目类型相同时,传送顺序自 动决定。如源、目类型不同,只要位数相同就可正确传 送。如源、目软组件号超出允许范围,则只对符合规定 的数据传送。 BMOV指令没有32位操作方式,但有脉 冲方式:BMOV(P)[S· [D· n。 ] ]
注意:按图5.31中的梯形图,数据在每个扫描周期都要 交换1次,而经过两次交换后D10和D20的内容将复原 。解决的办法是使用XCH指令的脉冲方式,只有在驱 动条件由OFF→ON时进行一次交换操作。XCH指令的 32位脉冲方式为:(D)XCH(P)[D1· [D2· ] ]。
5.3.9 BCD变换指令 1 1.指令用法 BCD码变换指令:FNC18 BCD [S· [D· ] ] [S· ]为被转换的软组件,[D· ]为目标软组件。 功能:将指定软组件的内容转换成BCD码并送到指定 的目软组件中去。再译成7段码,就能输出驱动LED。 2.指令说明 BCD码变换指令概要如表5.18。
5.3.2 区间比较指令 1
1.指令用法 区间比较指令:FNC11 ZCP [S1· [S2· [S3· [D· ] ] ] ] [S1· ]和[S2· ]为区间起点和终点,[S3· ]为另一比较软组 件,[D· ]为标志软组件,给出的是标志软组件的首地址 。 2.指令说明 区间比较指令概要如表5.11所示。
5.3.2 区间比较指令 3
图5.24 所示为区间比较指令示例梯形图,对应指令为: ZCP Kl00 K200 C0 M0。 如果X010接通, 则将执行区间比较操 作,即将C0的内容与区 间的上下限去比较,比 较结果写入相邻三个标 志位软组件M0~M2中。 标志位操作规则是: 若K100>C0,则M0被置1; 若K100<C0<K200,则M1被置1; 若K200<C0,则M2被置1。
SLC的功能指令
复位有效电平控制位;0(高电平有 效),1(低电平有效) 启动有效电平控制位;0(高电平有 效),1(低电平有效) 正交计数器计数速率选择,0(4X),1(1X)
计数方向控制位;0(减计数),1(增计数)
SM37.4 SM37.5 SM37.6 SM37.7
向HSC中写入计数方向;0(不更新),1(更 新计数方向)
返回目录
1.高速脉冲输出指令的格式
PLS Q STL指令
2.高速脉冲的输出方式 高速脉冲输出可分为:
高速脉冲串输出(PTO):提供方波输出,用户控制脉冲周期和脉冲数 宽度可调脉冲输出(PWM):提供连续、占空比可调的脉冲输出,用户 控制脉冲周期和脉冲宽度
返回目录
3.输出端子的连接 每个CPU有两个PTO/PWM发生器产生高速脉冲串和脉冲宽度可调
当前值大于预置值状 态位;0(小于等 于);1(大于)
指出了当前计数方向 当前值与预置值是否相等 当前值是否大于预置值的状态
可以通过监视高速计数器的状态位产生相应中断,完成重要操作。 返回目录
5. 高速计数器设置过程 为更好地理解和使用高速计数器,下面给出高速计数器的一般设置过
程。 (1)使用初始化脉冲触点SM0.1调用高速计数器初始化操作子程序。(这个 结构可以使系统在后续的扫描过程中不再调用这个子程序,从而减少了 扫描时间,且程序更加结构化)。
返回目录
2 指令功能 (1) 定义高速计数器指令(HDEF):
“HSC”端口指定高速计数器编号(0~5), “MODE”端口指定工作模式(0~11,各高速计 数器至多有12种工作模式)。EN端口执行条件 存在时,HDEF指令为指定的高速计数器选定一 种工作模式。在一个程序中,每一个高速计数器 只能使用一次HDEF指令。
数控编程中常用的指令(G代码、M代码)
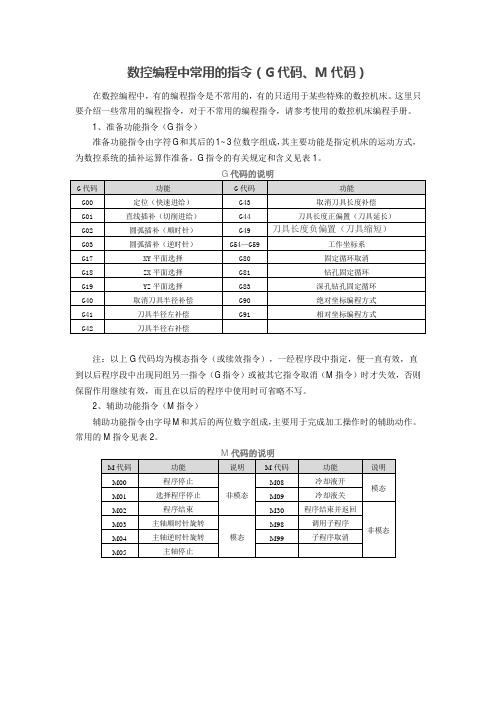
数控编程中常用的指令(G 代码、M 代码)在数控编程中,有的编程指令是不常用的,有的只适用于某些特殊的数控机床。
这里只要介绍一些常用的编程指令,对于不常用的编程指令,请参考使用的数控机床编程手册。
1、准备功能指令(G 指令)准备功能指令由字符G 和其后的1~3位数字组成,其主要功能是指定机床的运动方式,为数控系统的插补运算作准备。
G 指令的有关规定和含义见表1。
G 代码的说明G 代码 功能 G 代码 功能 G00 定位(快速进给) G43 取消刀具长度补偿 G01 直线插补(切削进给) G44 刀具长度正偏置(刀具延长)G02 圆弧插补(顺时针) G49 刀具长度负偏置(刀具缩短)G03 圆弧插补(逆时针) G54—G59 工作坐标系 G17 XY 平面选择 G80 固定循环取消 G18 ZX 平面选择 G81 钻孔固定循环 G19 YZ 平面选择 G83 深孔钻孔固定循环 G40 取消刀具半径补偿 G90 绝对坐标编程方式 G41 刀具半径左补偿 G91 相对坐标编程方式G42刀具半径右补偿注:以上G 代码均为模态指令(或续效指令),一经程序段中指定,便一直有效,直到以后程序段中出现同组另一指令(G 指令)或被其它指令取消(M 指令)时才失效,否则保留作用继续有效,而且在以后的程序中使用时可省略不写。
2、辅助功能指令(M 指令)辅助功能指令由字母M 和其后的两位数字组成,主要用于完成加工操作时的辅助动作。
常用的M 指令见表2。
M 代码的说明M 代码 功能 说明M 代码 功能 说明 M00 程序停止 非模态 M08 冷却液开 模态M01 选择程序停止 M09 冷却液关 M02 程序结束 M30 程序结束并返回 非模态 M03 主轴顺时针旋转 模态 M98 调用子程序 M04 主轴逆时针旋转 M99 子程序取消M05主轴停止。
1-5数控车床编程中的常用功能指令
福建省鸿源技工学校课时授课计划(2013 —2014 学年度第2学期)课程名称:数控机床编程与操作任课教师:王公海章节内容1-5数控车床编程中的常用功能指令授课班级12数控授课日期授课方式讲授作业练习习题册对应部分目的要求掌握数控编程的常用指令重点难点G02/G03,G50复习题巩固上节课知识点仪器教具粉笔黑板审批意见审批人: 20 年月日讲授内容和过程方法与指导一、常用插补指令1.快速点定位指令(G00)(1)指令格式G00 X Z ;X Z 为刀具目标点坐标。
例 G00 X30.0 Z10.0;福建省劳动和社会保障厅制课时授课计划(副页)第页讲授内容和过程方法与指导(2)指令说明G00 不用指定移动速度, 其移动速度由机床系统参数设定。
快速移动的轨迹通常为折线型轨迹,图中快速移动轨迹OA和BD 的程序段如下:OA:G00 X20.0 Z30.0;BD:G00 X60.0 Z0;G00 轨迹实例2.直线插补指令(G01)(1)指令格式G01 X Z F ;X Z 为刀具目标点坐标,F 为刀具切削进给的进给速度。
例图中切削运动轨迹CD的程序段为:G01 X40.0 Z0 F0.2;G01 轨迹实例(2)指令说明G01 指令是直线运动指令,它命令刀具在两坐标轴间以插补联动的方式按指定的进给速度做任意斜率的直线运动。
在G01 程序段中必须含有F 指令。
如果在G01 程序段中没有F 指令,而在G01 程序段前也没有指定F 指令,则机床不运动,有的系统还会出现系统报警。
(3)编程实例例试采用G00和G01指令编写如图所示工件右端轮廓的精加工程序。
G00 及G01 指令应用实例第页讲授内容和过程方法与指导3.圆弧插补指令(G02/G03)(1)指令格式G02(03)X Z R(CR=) ;G02(03)X Z I K ;G02表示顺时针圆弧插补;G03表示逆时针圆弧插补。
X Z 为圆弧的终点坐标值,其值可以是绝对坐标,也可以是增量坐标。
功能指令

6. 循环指令
• 1.指令用法说明 • (1)循环体起点指令: FNC 08 FOR(16) • (2)循环体终点指令: FNC 09 NEXT • 循环指令概要如表5.9所示。能够充当源操作数的为如表中[S·]所指定
2. 区间比较指令
例:试说明下面程序运行时,Y1、Y2、Y3分别在何时得电?
3. 传送指令
• 数据传送指令: FNC12 MOV [S·] [D·] • [S·]为源数据,[D·]为目软元件。 • 功能:将源数据传送到目软元件中去。
3. 传送指令
• 例: • 如X010接通,将D10的内容传送到D20中去,传送结果
3.2.1 程序流向控制功能指令(FNC00 – FNC09)
• FX 系列PLC的功能指令中程序流向控制指 令共有10条,功能号是FNC00~FNC09。 通常情况下,PLC的控制程序是顺序逐条执 行的,但是在许多场合下却要求按照控制 要求改变程序的流向。这些场合有:条件 跳转、调用与返回、中断调用与返回、循 环、警戒时钟与主程序结束。
3.2.1 程序流向控制功能指令
• 1. 条件跳转指令 • 条件跳转指令为CJ或CJ(P)后跟标号,其用法是当跳
转条件成立时跳过一段指令,跳转至指令中所标明的标号 处继续执行,若条件不成立则继续顺序执行。
3.2.1 程序流向控制功能指令
• 1. 条件跳转指令 • 例:
X20
CJ
P20
X21
Y10
• MOV(传送)
SMOV(BCD码移位传送)
▼功能指令及其应用资料
用加1、减1指令及变址寄存器完成,彩灯状态变化的时间单元为1s,用M8013实现。梯形图如下,图中X1为彩灯的控制开关。彩灯共12盏
例三、用一个按钮任意改变定时器的定时值
四、循环与移位类指令
移位指令
功能:两条指令是使位软元件中的状态向右/ 向左移位,n1指定位软元件长度,n2指 定移位的位数。
第一节 应用指令的基础知识
一、应用指令的基本格式
1、应用指令有三部分组成: 功能编号FNC---,助记符,操作数
(1)大多数功能指令有1至4个操作数,有的功能指令没有操作数; (2)[S]表示源操作数,[D]表示目标操作数;如果可使用变址功能,用[S·]和 [D·]表示。 (3)用n和m表示其它操作数,它们常用来表示常数K和H,或作为源和目标操作 数的补充说明
举例:
(1)三相异步电动机即能实现连续运行又能实现点动控制
(2)在工业控制当中经常采用手动和自动两种方式以确保生产控制的安全性和连续性
2、子程序调用指令CALL、子程序返回指令 SRET、主程序结束指令FEND。
程序格式:
如果 X000 = ON,则执行调用指令跳转到标记 P10 步。在这里,执行子程序后,通过执行SRET 指令返回原来的步即CALL指令之后的步
3.BFM写入指令TO
TO指令是将可编程控制器的数据写入特殊模块的缓冲寄存器(BFM)的指令,其使用说明如下:
对FROM、TO指令中的m1、m2、n (1)m1特殊模块编号 (2)m2缓冲寄存器(BFM)号 (3)n传送数据个数
九、触点比较指令
格式:
例二、定时报时器控制程序
应用计数器每15分钟为一设定单位,共96个时间单位。 现控制实现如下: (1) 6:30电铃Y0每秒响一次,6次后自动停止; (2)9:00——17:00,启动校园报警系统Y1; (3)18:00开校内照明Y2; (4)22:00关校园内照明Y2。
数控机床常用准备功能指令的编程方法1
G02 J _ K _ G19 Y _ Z _ F _ G03 R _
ቤተ መጻሕፍቲ ባይዱ号说明:
G02 I _ J _ G17 X _ Y _ F _ G03 R _
B
D C
X
相对坐标半径方式编程:
O0001 N100 G92 X0 Y0; N101 G00 X0 Y18 S600 T01 M03; N102 G02 X18 Y0 R18 F100; Y N104 G03 X68 Y0 R25; N106 G02 X88 Y20 R-20; A N108 M05; N110 M02;
常用指令复习
G00,G01,G02,G03; G90,G91,G92; M指令 F指令 ,S指令 T指令
三、刀具半径补偿指令
在零件轮廓铣削加 工时,由于刀具半 径尺寸影响,刀具 的中心轨迹与零件 轮廓往往不一致。 为了避免计算刀具 中心轨迹,直接按 零件图样上的轮廓 尺寸编程,数控系 统提供了刀具半径 补偿功能
注意:
建立补偿程序段,必须是在补偿平面内不为零的直线移动 建立补偿程序段,一般应在切入工件之前完成 撤销补偿程序段,一般应在切出工件之后完成
4)刀具半径补偿功能的优点:
(1)只需按零件轮廓编程,不需计算刀 具中心运动轨道;
(2)刀具磨损或刀具重磨后,刀具半径 变小,只需改动刀具半径补偿值,而不 必须改程序
G04——暂停指令(非模态指令)
功能:可使刀具作短时的无进给运动 编程格式:G04 X____ 或 G04 P____ 其中:X,P其后的数值表示暂停的时间,单位为s或ms ; 视具体数控系统而定。 用途: 用车削环槽、锪平面、钻孔等光整加工 用作时间匹配,对于那些动作较长的外部,或者为 了使某一操作有足够的时间可靠的完成,可在程序 中插入该指令。
第5章 功能指令
指令TO:从PLC基本单元将数据写到BFM
[m1] [m2] [D] [n]
注意: [m1]扩展模块号;
[m2]扩展模块中BFM的编号;
[D]指定存放数据的元件号;
当X1为ON时,2号扩展模块中BFM的#10~#15 的数据不断传送到PLC中的D10~D15中。
[n]指定扩展模块与PLC基本 单元之间传送的字数。
2021/2/13
第5章 功能指令
1/16
PLC 技术应用
基本元件
2、数据寄存器D 主要用于存储运算数据,可以对数据寄存器进行“读”、“写”
操作。FX系列中为16位(最高位为符号位,0为正,1为负),地址编
号相邻的两个数据寄存器可以组合为32位(最高位为符号位,0为正,
1为负)。
通用数据寄存器:D0~D199
2021/2/13
6
2
8
6
2
4
6
2
12
6
2
3
第5章 功能指令
只传送一次
运算结果存储在D15, D14中。D15中存储数据 为0,D14中存储数据为 16。
运算结果存储在D17, D16中。D17中存储数据 为0(余数),D16中存 储数据为3(商数)。
8/16
PLC 技术应用
功能指令
注意: 1、乘法、除法指令中,如果源操作数是16位,目标操作数是32位;如 果源操作数是32位,目标操作数是64位; 2、除法运算的结果商存储在目标操作数的低16位,余数存储在目标操 作数的高16位。
2021/2/13
第5章 功能指令
4/16
PLC 技术应用
功能指令
2、块传送指令BMOV 将源操作数指定的软元件开始的n点数据传送到指定的目标操作数
第五章功能指令第一至七节
(b)连续执行
脉冲执行/连续执行
图5-3b程序是连续执行方式的例子。当X1为ON状态时上述指 令在每个扫描周期都被重复执行。
某些指令,例如XCH、INC、DEC等,用连续执行方式时要 特别留意。这些指令用“ !”号标示。
注意:当X0和X1为OFF状态时,上述两指令不执行。目标元件的内容不变化,除 非另行指定。
[S.] [D.] n
→ 令(D0)+(D1)+(D2) (D4Z)
3
MEAN D0 D4Z K3
图中[S.]指取值首元件。N指定
0 LD
X0
1 MEAN 45
D0
D4Z
K3
取值个数。[D.]指定计算结果存 放地址。
[S]:(SOURSE)源操 作数。若可使用变址功能时, 表达为[S.]。有时源程序不止一
[D.]
D V,Z
步数:MEAN,MEAN(P)………..7步
MEAN:指令助记符 (P):脉冲执行功能
FNC45:功能号
(16):只能做16bit操作 (16/32):16或32bit操作
某些功能指令只需指定号即可,但许多功能指令在指定功能号的
同时还必须指定操作数。
图5-1所示是取平均值的指
X0
m、n:其他操作数。常常
令;X0=OFF,不执行该指令。 注意,某些功能指令在整个程序中只能出现
一次,即使用跳转指令使其分处于两段不可能同时 执行的程序中也不允许。但可利用变址寄存器多次 改变其操作数。
用来表示数制(十进制、十六 进制)或作为源和目标的补充 注释。需注释的项目多时也可 采用m1、m2等形式。
如图5-4所示,当一个16bit的数据传送到K1M0、K2M0或K3M0 时,只传送相应的低bit数据,较高bit的数据不传送,32bit数据传送 时一样。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[S]
[D]
ZCP K100 K120 C30 M3
M3 [S]<[S1] M4
[S1]<=[S]<=[S2]
M5
[S]>[S2]
3 工程项目管理规划
传送指令MOV (Move)
FNC12,传送指令将源数据传送到指定的目标操作数中
X0
[S]
[D]
MOV K100 D10
当X0闭合时,每扫描到MOV指令时,就把存于源操作数 十进制数100(K100)转换成二进制数,再传送到目标 操作数D10中; 当X0断开时,不执行MOV指令,数据保持不变
IRET
允许中断范围 中断服务程序(1) 中断服务程序(2)
程序结束指令(FEND)
FEND的功能指令编号为FNC06,无操作数,占用一个 程序步
FEND表示主程序结束,执行到FEND指令时PLC进行输 入输出处理、监控定时器刷新,完成后返回第0步
子程序(包括中断子程序)应放在FEND指令之后,END 之前。
功能指令在跳转时不执行,但脉冲输出指令PLSY、脉宽 调制输出PWM、带加减速脉冲输出PLSR,除外。
3 工程项目管理规划
子程序调用与子程序返回指 令
子程序调用指令CALL(Sub Routine Call)的功能指 令编号为FNC01,操作数为P0~P62(不包括P63 ),占3个程序步,允许用变址寄存器修改。
n
MEAN D0 D40 K3
[S]表示源操作数(其内容不随指令执行而变化的操作 数标为源)
在使用变址寄存器时,表示为[S.] 多个操作数用[S1]、[S2]……
3 工程项目管理规划
功能指令与操作数
X1
[S] [D]
n
MEAN D0 D40 K3
[D]表示目标操作数(其内容随执行指令改变的操作数 被称为目标)
3 工程项目管理规划
程序流向控制指令(FNC00FNC09)
CJ
(条件跳转)
CALL (子程序调用)
SRET (子程序返回)
IRET (中断返回)
EI、DI (中断允许与中断禁止、开中断与关中断)
FEND (主程序结束)
WDT (监控定时器刷新)
FOR、Next(循环开始和循环结束)
3 工程项目管理规划
功能指令
FX2N系列PLC的功能指令概述
工程项目 管理
主编:危道军 刘志强
PLC功能指令 PLC的功能指令实际上就是系统定义的许多
功能不同的子程序,用户在使用这些功能 指令时,相当于调用了对应的系统子程序 。
3 工程项目管理规划
FX2N系列PLC功能指令分类
✓程序流向控制 ✓数据传送与比较 ✓算术与逻辑运算 ✓数据移位与循环 ✓数据处理 高速处理
进梯形图指令不可变址修改
3 工程项目管理规划
变址寄存器V,Z
X1
MOV K10
V
X2
MOV K20
Z
X3 ADD D5V D15Z D40Z
当各逻辑行分别满足时,K10送到V,K20送到Z,所 以(V)、(Z)内容分别为10,20
当(D5V)+(D15Z)—— D40Z,即 (D15)+(D35)——(D60)
X0
MOV(P)K125 D20
3 工程项目管理规划
位元件和字元件
位元件:只处理ON/OFF状态的元件,如 X、Y、M、S
字元件:处理数据的元件,如T、C、D
如: 数据寄存器D为16位,在处理32位数据时使用 一 对数据寄存器的组合 将数据寄存器D0指定为32位指令的操作数时处理 (D1,D0)32位数据(D1为高16位,D0为低16位)
CJ(Conditional Jump)
指令编号为FNC00,操作数为P0~P63 CJ和CJ(P)指令用于跳过顺序程序中的某一部分,以减
少扫描时间 两个执行条件不同的跳转指令可以使用相同的标号,但一
个标号只允许出现一次 采用M8000作为跳转条件,则称为无条件跳转,因为
PLC运行中M8000一直接通。
3 工程项目管理规划
CJ(Conditional Jump)
X20 CJ P10
…
X21
Y10
X22 标号
P10
Y11
X20 CJ P10
X21 CJ P10
标号 P10
…
…
3 工程项目管理规划
CJ(Conditional Jump)
对于T、C,如果跳转时定时器或计数器正发生动作 ,则 此时立即中断计数或停止计时,直到跳转结束后继续进 行计时或计数。但是,正在动作的定时器T192-T199 (子程序控制定时器)与高速计数器C235-C255,不 管有无跳转仍旧继续工作。
比较指令CMP(Compare) 区间比较ZCP(Zone Compare) 传送指令MOV(Move) 移位传送SMOV(Shift Move) 取反传送指令CML(Complement) 块传送指令BMOV(Block Move) 多点传送指令FMOV(Fill Move) 数据交换指令XCH(Exchange) BCD变换指令(二进制数转换成BCD码并传送) BIN变换指令(BCD码转换为二进制数并传送)
3 工程项目管理规划
方便指令 外部设备通信 浮点运算 定位运算 时钟运算 触点比较
功能指令格式
采用梯形图和指令助记符相结合形式。 当X0条件满足时,MOV指令执行。
X0
MOV K125 D20
K125——源操作数,D20——目标操作数, X0——执行条件
3 工程项目管理规划
功能指令一般规则
每一条功能指令有一个功能号和一个助记符,功能号按 FNC00~FNC299编排
3 工程项目管理规划
比较指令CMP
FNC10,将源操作数[S1]和源操作数[S2]进行比较, 结果送到目标操作数[D]中,比较结果有三种,大于 、等于、小于
目标操作数[D]由3个软元件组成,梯形图中软元件标出 的是首地址,另外两个软元件紧跟其后
3 工程项目管理规划
比较指令CMP
X0 CMP K100 C20 M0 M0 (C20)<K100 M0=ON M1 (C20)=K100 M1=ON M2 (C20)>K100 M2=ON
在使用变址寄存器时,表示为[D.] 多个操作数用[D1]、[D2]……
3 工程项目管理规划
功能指令与操作数
X1
[S] [D]
n
MEAN D0 D40 K3
m,n表示其他操作数,常用于表示常数或表示[S]、 [D]的补充说明。有多个时用m1、m2或n1、n2
3 工程项目管理规划
功能指令的执行方式
执行方式:连续执行、脉冲执行 在指令助记符号后加符号(P)表示脉冲执行方式
3 工程项目管理规划
位元件组合及数据处理方式
当一个16位数据传送到K1M0、K2M0、K3M0时只传 送相应的低位数据,较高位不传送,32位数据的传送相 同。
在做16位数据操作时,参与操作的位元件由K1~K4指定 ,若仅有K1~K3指定,不足部分的高位均作0处理, 32位数据操作时相同。
被组合的位元件首元件习惯上用以0结尾元件,如K2X0, K4Y10
3 工程项目管理规划
循环指令
FOR, FNC08,指令用来表示循环区的起点,它的源操 作数用来表示循环次数N,可以取任意的数据格式。循 环次数N=1~32767,如N在-32767~0之间,当 作N=1处理,循环可嵌套5层
NEXT是循环区终点指令,功能指令编号为FNC09,占 用一个程序步,无操作数
3 工程项目管理规划
程序结束指令(FEND)
主程序
如 果
X10
CJ P20
主程序
X10=OFF
P20
3
END
如果 X10= ON
程序结束指令(FEND)
主程序
如 果
X11
CALL P21
如 果
主程序
X11=ON X11=OFF
P21 I100
3 工程项目管理规划
3 工程项目管理规划
数据长度与指令执行方式
功能指令可以处理16位数据,也可以处理32位数据; 指令助记符前加(D)符号时,表示该指令处理32位数据 处理32位数据时,用元件号相邻的两个元件组成元件对。
元件对的首地址用奇数、偶数均可,建议元件首地址统 一用偶数
3 工程项目管理规划
数据长度与指令执行方式
3 工程项目管理规划
移位传送SMOV (Shift Move)
FNC13源数据(二进制数)被转换成4位BCD码,然后 将它移位传送
X10
[S] m1 m2 [D] n
SMOV D1 K4 K2 D2 K3
X10满足条件时,源操作数[S]内的16位二进制数自动转换 成4位BCD码,然后将自源操作数(4位BCD码)右起第m1 位开始,向右数共m2位的数,传送到目的操作数(4位BCD 码)的右起第n位开始,向右数共m2位上去,最后自动将 目的操作数[D]中的四位BCD码转换成16位二进制数
子程序可以嵌套调用,最多嵌套5级 子程序返回指令SRET(Sub Routine Return)的功
能指令编号为FNC02,无操作数
3 工程项目管理规划
子程序调用与子程序返回指令 CALL
X0 100 104
标号 P10
…
…
X1 CALL P10
FEND SRET
标号 P11
子 程 序
标号 P12
3 工程项目管理规划
…
…
…
CALL(P) P11 FEND
CALL P12 (1)
SRET
(2) SRET
与中断有关的指令