北航计算固体力学大作业,网格收敛性分析
动网格流沙版完美整理.
动网格让网格动起来(1)—闲谈动网格在固体有限元计算中,网格运动实非什么稀奇事儿。
而且在绝多数固体计算的基本物理量是网格的节点位移,所以,固体计算中,网格节点运动是对的,没有运动反而不正常了。
也可以这么说:正因为计算域内部节点间的相对运动,才导致了内应力的产生。
流体计算与固体完全不同。
其根源在于它们使用的网格类型不同。
当前固体有限元计算采用的是拉格朗日网格,而流体计算则大多数采用的欧拉网格。
如果说把拉格朗日网格中的节点点看作是真实世界的物质原子的话,那么欧拉网格的节点则好比是真实世界中的一个个传感器,它们总是呆在相同的位置,真实的记录着各自位置上的物理量。
正常情况下,欧拉网格系统是这样的:计算域和节点保持位置不变,发生变化的是物理量,网格节点就像一个个布置在计算域中的传感器,记录该位置上的物理量。
这其实是由流体力学研究方法所决定的。
宏观与微观的差异决定了固体力学计算采用拉格朗日网格,流体计算采用欧拉网格。
关于这部分的详细解说,可以参阅任何一本计算流体动力学书籍。
世界是公平的。
有利必有弊。
朗格朗日网格适合计算节点位移,然而对于过大的网格变形却难以处理。
欧拉网格生来可以处理大变形(因为节点不动),然而对于对于节点运动的处理,则是其直接软肋。
然而很不幸的是,现实生活中有太多网格边界运动的实例。
如汽车发动机中的气缸运动、阀门开启与关闭、机翼的运动、飞机投弹等等等等举不胜举。
计算流体动力学计算的基本物理量通常为:速度、温度、压力、组分。
并不计算网格节点位移。
因此要让网格产生运动,通常给节点施加的物理约束是速度。
CFD中的动网格大体分为两类:(1)显式规定的网格节点速度。
配合瞬态时间,即可很方便的得出位移。
当然一些求解器(如FLUENT)也支持稳态动网格,这时候可以直接指定节点位移。
(2)网格节点速度是通过求解得到的。
如6DOF模型基本上都属于此类。
用户将力换算成加速度,然后将其积分成速度。
对于第一类动网格问题,在fluent中通常可以使用profile与UDF进行网格设置,通过规定节点或区域的速度、角速度或位移等方式来显式确定网格的运动,通常大部分的动网格问题都归于此类。
北航数值分析全部三次大作业
北航数值分析全部三次大作业第一次大作业是关于解线性方程组的数值方法。
我们被要求实现各种常用的线性方程组求解算法,例如高斯消元法、LU分解法和迭代法等。
我首先学习了这些算法的原理和实现方法,并借助Python编程语言编写了这些算法的代码。
在实验中,我们使用了不同规模和条件的线性方程组进行测试,并比较了不同算法的性能和精度。
通过这个作业,我深入了解了线性方程组求解的原理和方法,提高了我的编程和数值计算能力。
第二次大作业是关于数值积分的方法。
数值积分是数值分析中的重要内容,它可以用于计算曲线的长度、函数的面积以及求解微分方程等问题。
在这个作业中,我们需要实现不同的数值积分算法,例如矩形法、梯形法和辛普森法等。
我学习了这些算法的原理和实现方法,并使用Python编写了它们的代码。
在实验中,我们计算了不同函数的积分值,并对比了不同算法的精度和效率。
通过这个作业,我深入了解了数值积分的原理和方法,提高了我的编程和数学建模能力。
第三次大作业是关于常微分方程的数值解法。
常微分方程是数值分析中的核心内容之一,它可以用于描述众多物理、化学和生物现象。
在这个作业中,我们需要实现不同的常微分方程求解算法,例如欧拉法、龙格-库塔法和Adams法等。
我学习了这些算法的原理和实现方法,并使用Python编写了它们的代码。
在实验中,我们解决了一些具体的常微分方程问题,并比较了不同算法的精度和效率。
通过这个作业,我深入了解了常微分方程的原理和方法,提高了我的编程和问题求解能力。
总的来说,北航数值分析课程的三次大作业非常有挑战性,但也非常有意义。
通过这些作业,我在数值计算和编程方面得到了很大的提升,也更加深入地了解了数值分析的理论和方法。
虽然这些作业需要大量的时间和精力,但我相信这些努力将会对我未来的学习和工作产生积极的影响。
有限元网格划分和收敛性
一、基本有限元网格概念1.单元概述ﻫ几何体划分网格之前需要确定单元类型.单元类型的选择应该根据分析类型、形状特征、计算数据特点、精度要求和计算的硬件条件等因素综合考虑。
为适应特殊的分析对象和边界条件,一些问题需要采用多种单元进行组合建模。
ﻫ 2.单元分类选择单元首先需要明确单元的类型,在结构有限元分析中主要有以下一些单元类型:平面应力单元、平面应变单元、轴对称实体单元、空间实体单元、板单元、壳单元、轴对称壳单元、杆单元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。
根据不同的分类方法,上述单元可以分成以下不同的形式。
ﻫ3。
按照维度进行单元分类根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。
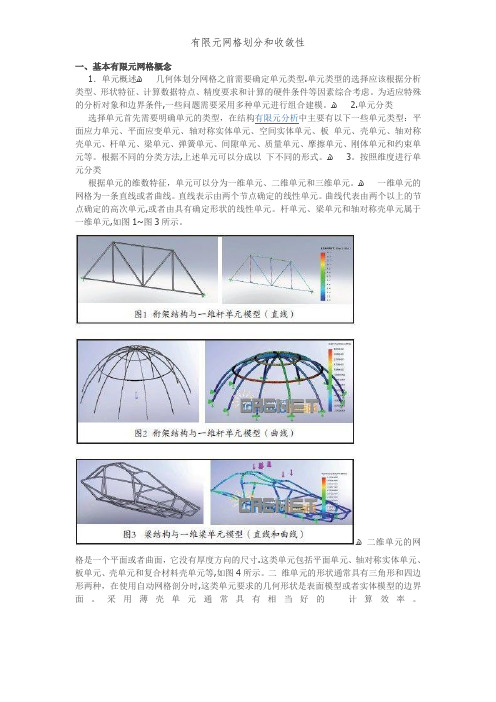
ﻫ一维单元的网格为一条直线或者曲线。
直线表示由两个节点确定的线性单元。
曲线代表由两个以上的节点确定的高次单元,或者由具有确定形状的线性单元。
杆单元、梁单元和轴对称壳单元属于一维单元,如图1~图3所示。
ﻫ二维单元的网格是一个平面或者曲面,它没有厚度方向的尺寸.这类单元包括平面单元、轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图4所示。
二维单元的形状通常具有三角形和四边形两种,在使用自动网格剖分时,这类单元要求的几何形状是表面模型或者实体模型的边界面。
采用薄壳单元通常具有相当好的计算效率。
ﻫﻫ三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元包括空间实体单元和厚壳单元,如图5所示.在自动网格划分时,它要求的是几何模型是实体模型(厚壳单元是曲面也可以)。
ﻫ4.按照插值函数进行单元分类根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次单元和更高次的单元。
线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面.这类单元的优点是节点数量少,在精度要求不高或者结果数据梯度不太大的情况下,采用线性单元可以得到较小的模型规模.但是由于单元位移函数是线性的,单元内的位移呈线性变化,而应力是常数,因此会造成单元间的应力不连续,单元边界上存在着应力突变,如图6所示。
北航数值分析报告大作业二
数值分析大作业(二)学院名称宇航学院专业名称航空宇航推进理论与工程学生姓名段毓学号SY16153062016年11月5日1 算法设计方案首先将矩阵A 进行拟上三角化,把矩阵A 进行QR 分解,计算出RQ 。
要得出矩阵A 的全部特征值,首先对A 进行QR 的双步位移得出特征值。
最后,采用列主元的高斯消元法求解特征向量。
1.1 A 的拟上三角化因为对矩阵进行QR 分解并不改变矩阵的结构,因此在进行QR 分解前对矩阵A 进行拟上三角化可以大大减少计算机的计算量,提高程序的运行效率。
具体算法如下所示,记A A =)1(,并记)(r A 的第r 列至第n 列的元素为()n r r j n i a r ij,,1,;,,2,1)(ΛΛ+==。
对于2,,2,1-=n r Λ执行 若()n r r i a r ir,,3,2)(Λ++=全为零,则令)()1(r r A A =+,转5;否则转2。
计算()∑+==nri r ir r a d 12)(()()r r r r r r r r r r d c a d a c ==-=++则取,0sgn )(,1)(,1若)(,12r rr r r r a c c h +-=令()nTr nrr r r r r r r r R a a c a u ∈-=++)()(,2)(,1,,,,0,,0ΛΛ。
计算r r T r r h u A p /)(=r r rr r Tr r h u p t /=r r r r u t q -=ωT rr T r r r r p u u A A --=+ω)()1(继续。
1.2 A 的QR 分解具体算法如下所示,记)1(1-=n A A ,并记[]nn r ij r a A ⨯=)(,令I Q =1 对于1,,2,1-=n r Λ执行 1.若()n r r i a r ir ,,3,1)(Λ++=全为零,则令r r Q Q =+1r r A A =+1,转5;否则转2。
网格类型对流场计算效率和收敛性的影响

Abstract: In the view of the influence of different unstructured m esh types on the fluid calculation efficien— cy and convergence on premise of the sam e surface mesh size and body mesh unit num ber,the computa— tional efficiency and convergence of tetrahedral m esh,hexahedral m esh and polyhedral mesh in CFD ca1cu— lation are compared. The result shows that under the conditions of same surface mesh size,the conver— gence of hexahedral mesh is better than that of the others. Besides,the time and RA M for calculation of hexahedral m esh are less than that of the others.The convergence rate of polyhedral mesh is m uch better. but the computational efficiency of polyhedral mesh is a little lower than that of tetrahedra1 mesh The
计算固体计算力学-第二章非线性方程组的解法解答

计算固体计算力学
Newton法得到的序列{an}具有二阶收敛速度。 粗略的说,用Newton法迭代一次大约有效数位 增加一倍,例如, a0准确到一位,则迭代3次就 可以得到准确8位的近似解。这意味着Newton 法收敛很快,这是它的主要优点。
Newton法自校正的。也就是说,an+1仅依赖于 Ψ(an)及an,前面迭代产生的舍入误差不会一步步 传下去。
am+1=am+Δam 在以上各式中,下标m表示增量步的步数, 而λm=1的解对应于Ψ(a)=P(a)-R=0的解。
34
计算固体计算力学
在一个自变量的情况下,求解非线性方程 组的过程如下图所示。如果Δλm足够小,则认 为所得解即为方程组的合理的近似解。
但是,在计算的每一步,都会引起某些偏 差,结果使解答漂移,而且随着求解步数的 增多,这种偏差不断积累,以致 最后的解将偏离真解较远。
31
计算固体计算力学
2.4 增量方法
求解非线性方程组的另一类方法是增量方法。 使用这种方法需要知道“荷载”项(R)为零时问 题的解(a)0。在实际问题中,(R)经常代表真实 荷载,(a)0 代表结构位移。在问题的初始状态, 它们均为零。这种从问题的初值开始,随着荷 载列阵(R)按增量形式逐渐增大,研究(a)i的变 化规律的方法,称为增量方法。
Kn
1
an
,
K
n1
an1 an
a n 1
an
,
K n1 K n K n
n 0,1, 2,
其中,ΔKn是Kn的一个低秩修正矩阵,常 用的是秩1或秩2的矩阵,以减小计算量。
ΔKn的选取查阅相关的资料。
北航计算固体力学课件,第三章
Dividing through by dx1dx2dx3 , we have
x1
x3
4
Computational Solid Mechanics, Chapter 3
11 21 31 X1 0 x1 x2 x3
ji x j
X i 0 Cyclic permulation
3
Computational Solid Mechanics, Chapter 3
3 EQUATIONS OF EQUILIBRIUM
11 d x 1 11 dx 2 dx3 11 x 1 21 d x 2 21 dx1dx3 21 x 2 31 31 x dx3 31 dx2 dx1 3 X 1dx1dx2 dx3 0
Computational Solid Mechanics, Chapter 3
CHAPTER3 TWO DIMENSIONAL FEM
1
Computational Solid Mechanics, Chapter 3
§3-1 PLANE ELASTIC PROBLEM 1. CONSTITUTIVE RELATIONS
13
Computational Solid Mechanics, Chapter 3
9. Rectangular Elements Use one dimensional functions:
(1,1)
u( x, y) u( x)u( y)
u ( x) aii ( )
n
4 b 1
Bσ
( p xu p yv)ds
北航计算流体力学大作业题目及分析

无反射边界条件方法
• Thompson特征边界条件(一维到高维) • Giles无反射边界条件(二维) • 要求:要阐述清楚以上两种无反射边界条 件方法的原理以及推导过程,并利用文献 中的算例说明各种边界条件定义方法对模 拟结果的影响
• • • • 当地时间步长方法 残差光顺法 多重网格方法 低速预处理方法
• 要求:三种方法的原理、数值方法、适用 性等要阐述清楚,要有文献的算例和分析
网格生成方法及网格质量控制
• 结构化网格生成方法 • 非结构网格生成方法
• 网格类型及网格质量对模拟结果准确性的 影响分析
• 要求:要阐述清楚常用的网格生成方法, 对网格质量对模拟结果的影响要利用文献 的算例进行分析
通量差分分裂格式
• • • • Riemann问题及近似Riemann解 Godnov格式 Roe格式 膨胀激波问题、Carbuncle问题(运动强激 波的计算不稳定问题)、以及熵修正方法
• 要求:要阐述清楚格式的构造思路和方法、 格式的特点、与其它类型通量格式的计算 比较等
对流迎风分裂格式
• AUSM格式(Liou M.S.)
– 格式构造的思想 – AUSM、AUSMD/P格式(Jameson)
– SLIP格式、CUSP格式、…… – LED概念
• 要求:要阐述清楚格式的构造思路和方法、 格式的特点、与其它类型通量格式的计算 比较等
通量计算的高精度格式
• ENO、WENO概念及格式 • 间断Galerkin方法 • 拟谱方法
– Spectral Difference – Spectral Volume – Penalty Lifting method
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Homework of Computational Solid Mechanics
Element Type : PLANE 183 with 8 nodes
Thick of the plane : 0.01m
Material Properties :
EX=2×105Mpa PRXY=0.3 Density=7800kg/m3
Case1:
Concentrated loads F respectively applied on A and B ,F=10kN Case2:
Uniformly distributed load q applied on line AB ,q=20kN/m
1、1×1 meshing
A and
B have the same displacements .Displacements of A、B is shown in table 1 .
Table 1
Figure 1: X-Component of displacement in Case 1
Figure 2: X-Component of displacement in Case 2 2、5×5 meshing
Displacements of A、B is shown in table 2 .
Table 2
Figure 3: X-Component of displacement in Case 1
Figure 4: X-Component of displacement in Case 2 3、10×10 meshing
Displacements of A、B is shown in table 3.
Table 3
4、The first 10 frequencies
We also get the first 10 frequencies shown in table 4 .
Table 4
Figure 5: X-Component of displacement in Case 1
Figure 6: X-Component of displacement in Case 2
Reorganize the data in table 1 ,table 2 and table 3 we get a new table shown as table 5 .Data in table 5 is the displacements in X direction of A,B in different cases and meshings .
Table 5
Analysis:
1、Analyze the data in table 5 ,we can know ,the displacement of A ,B is larger in case 1 than that in case 2 .That means it has a larger displacement when a concentrate load is applied .
2、Analyze the data in table 5 , we can also know that the numbers with more meshes are a little larger .In fact , the data will be more accurate if we use more meshes .
3、Look at figure 3, figure 4,figure 5and figure 6,we can know that the nodes on line AB have the same displacements when a uniformly distributed load is applied .It’s not suitable for case 1 when a concentrate load is applied .
4、Analyze the data in table 4,the frequencies get smaller when the number of meshes is bigger .。