基于matlab的二阶锁相环仿真设计
优化-二阶系统的MATLAB仿真设计

优化-二阶系统的MATLAB仿真设计随着科技的发展和应用的需求,优化控制在控制系统设计中扮演着越来越重要的角色。
在现代控制理论中,二阶系统是常见的一种模型。
本文将介绍如何利用MATLAB进行二阶系统的仿真设计,并优化其性能。
1. 二阶系统的基本原理二阶系统是指由二阶微分方程描述的动态系统。
它通常包含一个二阶传递函数,形式为:G(s) = K / (s^2 + 2ζωn s + ωn^2)其中,K是增益,ζ是阻尼比,ωn是自然频率。
2. MATLAB仿真设计MATLAB是一种功能强大的工具,可用于系统仿真与优化。
以下是使用MATLAB进行二阶系统仿真设计的基本步骤:2.1. 创建模型首先,我们需要在MATLAB中创建二阶系统的模型。
可以使用`tf`函数或`zpk`函数来定义系统的传递函数。
s = tf('s');G = K / (s^2 + 2*zeta*wn*s + wn^2);2.2. 仿真分析通过对系统进行仿真分析,可以获得系统的时域响应和频域特性。
可以使用`step`函数进行阶跃响应分析,使用`bode`函数进行频率响应分析。
step(G);bode(G);2.3. 控制器设计根据系统的性能要求,设计合适的控制器来优化系统的性能。
可以使用PID控制器等不同类型的控制器来调节系统。
2.4. 优化系统利用MATLAB提供的优化工具,对系统进行参数调节和优化。
可以使用`fmincon`函数等进行系统优化。
2.5. 仿真验证通过对优化后的系统进行仿真验证,评估其性能是否达到预期。
可以再次使用`step`函数或`bode`函数来分析系统。
3. 总结通过MATLAB进行二阶系统的仿真设计,可以帮助工程师优化系统的性能。
本文介绍了MATLAB仿真设计的基本步骤,包括模型创建、仿真分析、控制器设计、系统优化和仿真验证。
希望本文能对相关研究和工作提供一些参考和帮助。
基于matlab的2psk系统设计与仿真
智者论道智库时代·270·基于MATLAB 的2PSK 系统设计与仿真龚猷龙(重庆工商职业学院,重庆 404100)摘要:本文介绍了2PSK 调制及解调原理。
并根据2PSK 系统原理,利用MATLAB 软件编程实现了数字调制方式2PSK 的调制与解调,通过仿真系统的波形图,可以更直观地了解其系统工作流程,进一步验证了原理的正确性。
从理论分析到仿真验证,为通信原理课程的教学设计提供指导。
关键词:数字调制;解调;MATLAB;2PSK 中图分类号:TP274文献标识码:A 文章编号:2096-4609(2019)44-0270-002一、前言2PSK 是二进制相移键控的数字调制方式,它用两个初相相差π的载波来传递二进制信息。
相比于ASK 和FSK,2PSK 具有实现简单、频谱效率高、抗干扰能力强等特点,在无线通信中的应用比较广。
本文采用模拟仿真的方式,利用MATLAB 数学仿真工具进行2PSK 调制解调系统的设计与仿真,实现起来非常方便,易于教学指导。
可以非常直观的认识数字调制原理,加深了调制与解调技术的理解。
二、2PSK 调制解调原理(一)2PSK 系统的基本原理在保持振幅和频率不变的情况下,2PSK 相移键控是利用载波的相位的变换来表示数字基带信号。
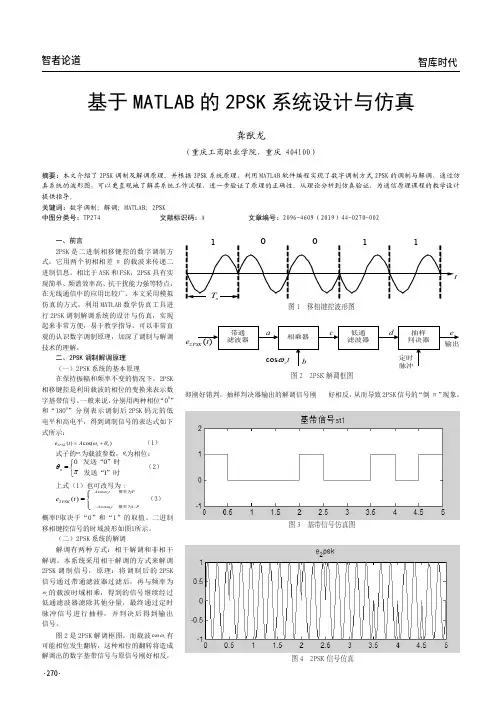
一般来说,分别用两种相位“00”和“1800”分别表示调制后2PSK 码元的低电平和高电平,得到调制信号的表达式如下式所示:)cos()(2n c PSK A t e θω+= (1)式子的c ω为载波参数,n θ为相位:”时发送“”时发送“100=πθn (2)上式(1)也可改写为:P P t A t A PSK c c t e 概率为概率为−− =1cos cos 2)(ωω (3)概率P取决于“0”和“1”的取值。
二进制移相键控信号的时域波形如图1所示。
(二)2PSK 系统的解调解调有两种方式:相干解调和非相干解调。
本系统采用相干解调的方式来解调2PSK 调制信号,原理:将调制后的2PSK 信号通过带通滤波器过滤后,再与频率为c ω的载波时域相乘,得到的信号继续经过低通滤波器滤除其他分量,最终通过定时脉冲信号进行抽样,并判决后得到输出信号。
基于MATLAB锁相环

4.当频率不等时,相位差不为恒定值,鉴相器的输出电压发生变化,调整 VCO的振荡频 率,直至频率相等。
工作任务
本次设计的任务1.在输入信号的相位发生阶跃变化时,分析锁相环 性能;2分析调制作用。
1.
性能
锁定性能
环路性能
稳定性能
2.
调制作用
锁定性能
1.一阶锁相环
当输入相位发生阶跃变化时,如1所示。 Kd *Kv=1,建立时间t1=1.58。 Kd *Kv=4, 建立时间t2=0.4。 当增益增大时,建立时间较短。
在现代集成电路中,锁相环是一种广泛应用于模拟、数字及 数模混合电路系统中的非常重要的电路模块。在通信和数字系 统中可以作为时钟恢复电路应用;在电视和无线通信系统中可 以用作频率合成器来选择不同的频道;PLL还可应用于频率调 制信号的解调。总之,PLL已经成为许多电子系统的核心部分。 因此,研究锁相环具有重要意义。
中间信号: T 2 1 / 100 2 2 / T 2 200 2 0
结论
本次论文完成内容: (1)根据仿真波形,分析一,二阶锁相环的锁定性能,并对 二者进行了比较。 (2)分别对锁相环基本模块的输出进行仿真,根据仿真波形, 分析环路性能。 (3)根据仿真波形,分析不同阻尼系数对稳定性能的影响。 (4)根据仿真波形,分析锁相环的调制作用。
基ห้องสมุดไป่ตู้原理
2.PLL的响应过程
t<t。时,PLL为锁定状态。当t=t。
时,输入信号频率有一个小的阶跃
(为了分析简单,假设阶跃频率比 较小),输入信号的相位领先于输
o o
出信号,两者的相位差将开始随 ur
着时间增加,导致鉴相器产生一
个随时间增加的输出信号ud(t) , uo
基于matlab的数字锁相环DPLL的仿真
2、DPLL 基本模型和原理 全数字锁相环包括数字鉴相鉴频器(PFD) 、数字滤波器 (LPF) 、数字振荡器(NCO)三部分,如下图所示:
与模拟锁相环电路相比, 全数字锁相环实质上是通过将 前者替换成数字电路而得到的,所做的改变是将其中的鉴相 鉴频器(PFD)和环路低通滤波器(LPF)转换到离散系统。 环路低通滤波器(LPF)可以通过一个希望的传输函数的拉普 拉斯变换的 z 变换而得到。压控振荡器需要转换成数控振荡 器(Numerically Controlled Oscilaator) 。 锁相环闭环系统状态的变化依赖于 PFD 输出的相位误差。 相位误差输出一次, 锁相环状态改变一次; PFD 不输出相位误 差,锁相环里的所有信号均不改变状态。根据上面的分析, 可以将仿真过程分为两个过程:1)计算 PFD 输出的相位误 差;2)根据相位误差,计算锁相环里各个模块的状态。 PFD 电路用于检测参考信号和反馈信号之间的相位误差。 它的状态转换如下图所示:
Tk T0 T0 yk 1 N
式中 T0 / N 为数控振荡器周期相对于中心周期 T0 变化的最
Tk 小单位。 当无控制时,yk 1 =0, = T0 ; 有控制时周期以 T0 / N
或其倍数的量相对于 T0 作阶跃式的改变。与 T0 / N 相对应的相 位改变量为:
2 (rad ) N
所以 N 是表示 2 弧度内相位受控变化大小的一个量,也 叫模 2 内状态数。这就是说,数控振荡器输出脉冲的瞬时相 位 0 (k ) ,在 2 弧度内只能以 或其倍数离散地变化。在这时,
T0
/ N = , 为信号钟的周N
T0 Tc
三、参考代码和仿真结果
通过建立以上所介绍的全数字锁相环的仿真模型,在 matlab 中得到其仿真系统如下图所示:
matlab二阶数字锁相环在相位阶跃激励情况下系统的暂态响应
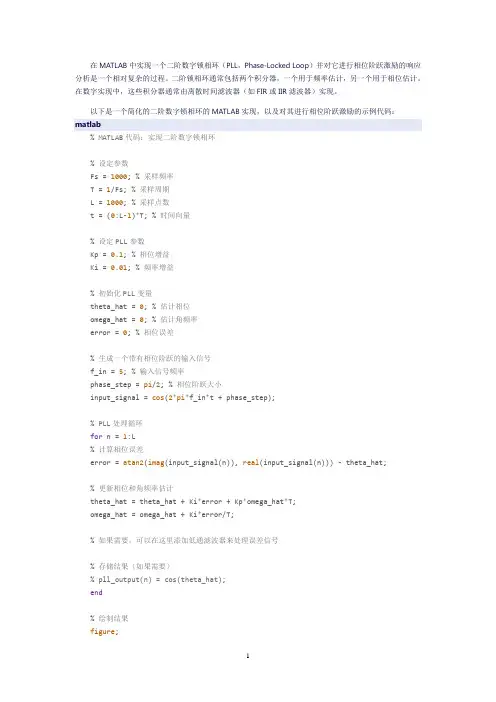
在MATLAB中实现一个二阶数字锁相环(PLL,Phase-Locked Loop)并对它进行相位阶跃激励的响应分析是一个相对复杂的过程。
二阶锁相环通常包括两个积分器,一个用于频率估计,另一个用于相位估计。
在数字实现中,这些积分器通常由离散时间滤波器(如FIR或IIR滤波器)实现。
以下是一个简化的二阶数字锁相环的MATLAB实现,以及对其进行相位阶跃激励的示例代码:matlab% MATLAB代码:实现二阶数字锁相环% 设定参数Fs = 1000; % 采样频率T = 1/Fs; % 采样周期L = 1000; % 采样点数t = (0:L-1)*T; % 时间向量% 设定PLL参数Kp = 0.1; % 相位增益Ki = 0.01; % 频率增益% 初始化PLL变量theta_hat = 0; % 估计相位omega_hat = 0; % 估计角频率error = 0; % 相位误差% 生成一个带有相位阶跃的输入信号f_in = 5; % 输入信号频率phase_step = pi/2; % 相位阶跃大小input_signal = cos(2*pi*f_in*t + phase_step);% PLL处理循环for n = 1:L% 计算相位误差error = atan2(imag(input_signal(n)), real(input_signal(n))) - theta_hat;% 更新相位和角频率估计theta_hat = theta_hat + Ki*error + Kp*omega_hat*T;omega_hat = omega_hat + Ki*error/T;% 如果需要,可以在这里添加低通滤波器来处理误差信号% 存储结果(如果需要)% pll_output(n) = cos(theta_hat);end% 绘制结果figure;subplot(2,1,1);plot(t, input_signal);title('输入信号(带有相位阶跃)');xlabel('时间 (s)');ylabel('幅度');subplot(2,1,2);plot(t, theta_hat);title('估计相位');xlabel('时间 (s)');ylabel('相位 (rad)');% 你可以根据需要添加更多的分析或可视化这段代码创建了一个简单的二阶数字锁相环,并对一个带有相位阶跃的输入信号进行处理。
锁相环设计与MATLAB仿真
锁相环设计与MATLAB仿真锁相环(Phase-Locked Loop,PLL)是一种电路设计技术,用于提取输入信号中的相位信息,并在输出信号中保持输入信号与输出信号的相位差稳定。
PLL广泛应用于通信系统、时钟生成器、频率合成器等领域。
锁相环主要由相位检测器(Phase Detector,PD)、环路滤波器(Loop Filter,LF)、振荡器(Voltage-Controlled Oscillator,VCO)和分频器(Divider)组成。
相位检测器用于比较输入信号和VCO输出信号的相位差,并产生一个低频的误差信号。
传统的相位检测器包括异或门相位检测器(XOR PD)和倍频器相位检测器(Multiplier PD)。
异或门相位检测器适用于窄带相位差测量,倍频器相位检测器适用于宽带相位差测量。
MATLAB提供了用于建模和仿真PLL的工具箱,可以方便地进行相位检测器的设计和性能分析。
环路滤波器用于滤波相位误差信号,根据滤波器的设计方法不同,可以实现不同的环路特性。
传统的环路滤波器包括积分环路滤波器和比例积分环路滤波器。
积分环路滤波器对误差信号进行积分,使得环路系统具有很高的稳定性和抗干扰能力,但响应时间较长。
比例积分环路滤波器在积分环路滤波器的基础上引入比例增益,可以更快地响应相位误差的变化。
振荡器(VCO)根据环路滤波器输出的控制电压来生成输出信号,并提供给分频器进行频率除法操作。
振荡器通常采用压控振荡器(VCO)或电流模式逻辑(Current Mode Logic,CML)结构,可以根据应用需求选择合适的振荡器设计。
分频器用于将振荡器输出的高频信号按照设定的分频比例进行分频,生成与输入信号相位对齐的输出信号。
分频器采用计数器和锁存器设计,计数器用于记录输入信号的周期数,锁存器将计数器的值锁定在一个周期,输出给相位检测器进行相位比较。
锁相环的设计和仿真可以通过MATLAB工具箱进行。
首先,设计相位检测器的传输函数和特性,选择适当的相位检测器类型和设计参数。
锁相环的MATLAB的仿真程序
g13 = [tf([Kd 0],[1 2*pi*kv*kd])] %vco voltage and input signal transmittance
[y13 t] = lsim(g13,u,t)
figure
plot(t,y13)
xlabel('TIME IN SECONDS')
clt_2 = tf([2*zeta*wn wn^2],[1 2*zeta*wn wn^2]);
[out_2 t] = lsim(clt_2,step,t);
figure
subplot(3,1,1)
plot(out_2)
xlabel('Time in seconds')
%techniques are applied here.
%**************************************************************
%STEP RESPONSE OF THE FIRST ORDER CLOSED LOOP TRANSMITTANCE OF PLL
ylabel('Amplitude')
TITLE ('Step Response of 2nd Order transmittance of PLL')
grid on;
Hale Waihona Puke % Step response of 2nd order closed loop error transmittance of pll
grid on;
% Step response of 1st order closed loop error transmittance of pll
基于MATLAB数字锁相环仿真设计
本科生毕业设计(申请学士学位)论文题目基于Matlab的数字锁相环的仿真设计作者专业名称电子信息工程指导教师2014年5月学生:(签字)学号:答辩日期:2014 年 5 月24 日指导教师:(签字)目录摘要 (1)Abstract (1)1 绪论 (2)1.1 本文研究背景 (2)1.2 本文研究意义 (2)1.3 锁相环和仿真方式 (2)1.3.1 锁相环 (2) (2)3 2 模拟锁相环Matlab仿真 (3)2.1 模拟锁相环方案 (3)2.1.1 模拟鉴相器 (3)2.1.2 模拟低通滤波器 (6)2.1.3 模拟压控振荡器 (7)2.2 模拟锁相环仿真 (8)2.3 本章小结 (9)3 数字锁相环Matlab仿真 (10)3.1 数字锁相环方案 (10)3.1.1 数字鉴相器 (10)3.1.2 数字滤波器 (12)3.1.3 数字压控振荡器 (13)3.2 数字锁相环仿真 (14)3.3 本章小结 (15)4 总结与展望 (15)参考文献 (16)致 (18)基于Matlab的数字锁相环的仿真设计摘要:锁相环是一种能够自动跟踪信号相位并达到锁频目的的闭环负反馈系统。
数字锁相环在无线电领域得到较广泛的应用和发展。
而且已经成为雷达、通信、导航等各类电子信号产品不可替代的元器件之一。
锁相环的窄带跟踪性能使其得到较广泛应用。
因为锁相技术在实际应用中较为复杂,所以锁相环的设计通常采用仿真设计这种方式。
本次设计采用Matlab这一软件进行辅助仿真设计,完全能达到设计预期的目标。
Matlab中的Simulink仿真软件,具有很强的灵活性和直观性。
本次设计所采用的方法是在simulink中搭建模拟锁相的模型,并对模拟锁相环的组成、结构、设计进行不断的分析和改进。
然后根据模拟锁相环的原理进行改进,并搭建数字锁相环。
关键词:锁相环;自动跟踪;matlab;simulinkSimulative design of digital phase-locked loop based onMatlabAbstract:PLL is the automatic tracking system of close loop atracking signal phase. It is widely used in various fields of radio. It has become an irreplaceable part of radar, communication, navigation and all kinds of electronicsignal device. PLL is able to be widely used. Because, it has unique narrow-band tracking performance. However, because of the complexity of phase lock technique, for the design of PLL have brought great difficulty. This design uses Matlab, the simulative software for design assistance, can completely meet the design expectations. Simulink simulative software on Matlab, has strong flexibility and intuitive. Methods used by this project is to build the analog phase locked in the Simulink model, and the composition, structure, design of analog phase-locked loop of continuous improvement and analysis. It improved according to the principle of analog PLL, build digital phase-locked loop in Simulink, and then reach the simulation design of digitalphase-locked loop based on Matlab the design objective .Key words: PLL, Automatic tracking, Matlab, simulink1 绪论1.1 本文研究背景19世纪30年代法国H.de Bellescize首次提出同步检波这一概念,并且设计出锁相环电路这一划时代的研究成果[1]。
锁相环的matlab的仿真程序(PLL matlab simulation program)
锁相环的matlab的仿真程序(PLL matlab simulation program)% phasell。
M%锁相环(PLL),调整一个本地振荡器的相位。
%与输入的调制信号。
这样的阶段%输入信号被锁定,信号解调。
%也用于PM和FM。
我们将使用闭环系统来实现它。
控制系统这里应用了%技术。
%*********************************************************** ***锁相环一阶闭环透过率的%阶跃响应% h(s)= 1;%系统类型号= 1;%道/ thetai(输出/输入阶段)关闭所有千伏= 1;KD=1;DT = 0.01T=0:dt:2u =(1,长度(t))G11 = [ TF([ 2 * pi *千* KD ]、[ 1 2 * pi *千* KD ])]为其传递函数在给定的讲义[ 11 ] = lsim(G11,U,T)图形情节(t,Y11)xlabel(秒的时间)ylabel(幅度标准”)标题(第一阶'step响应闭环率”)%*********************************************************** ****锁相环一阶闭环误差透过率的阶跃响应所有其他因素h(s)等在这里都一样。
%中来/ thetai(相同的解释。
如上)G12 = [([ 1,0 ],TF [ 1 2 * pi *千* KD ])]误差透过讲义中给出[ 12 ] = lsim(G12,U,T)图形情节(t,Y12)xlabel(秒的时间)ylabel(幅度标准”)标题(第一阶'step响应闭环误差率”)%*********************************************************** *****锁相环一阶闭环透过率的%阶跃响应VCO与输入信号相位之间的百分比% h(s)= 1;%系统类型号= 1;% v2 / thetaiKD=1;G13 = [ TF([ 0 ] [ 1 KD,2 * pi *千* KD ])]为压控振荡器的电压和输入信号透过率[ 13 ] = lsim(G13,U,T)图形情节(t,Y13)xlabel(秒的时间)ylabel(幅度标准”)标题(第一阶'step响应闭环透光率的B / W的VCO和输入阶段”)%*********************************************************** *********锁相环二阶闭环透射率的阶跃响应%系统类型号= 2;%道/ thetai= 3.15ζ= sqrt((π*千* KD)/(2 *))omegan = sqrt(2 * pi *伏* KD *)G21 = [([ 2 *泽塔* TF omegan omegan ^ 2 ]、[ 1 2 *泽塔* omegan omegan ^ 2 ])]【Y21 T ] = lsim(G21,U,T)图形情节(t,Y21)xlabel(秒的时间)ylabel(幅度标准”)标题(二阶锁相环的环路闭合'step响应率)%*********************************************************** **********锁相环二阶闭环误差透过率的阶跃响应%系统类型号= 2;% / thetai中来G22 = [([ 0 ] 0 TF 1,[ 1 2 *泽塔* omegan omegan ^ 2 ])]【Y22 T ] = lsim(G22,U,T)图形情节(t,Y22)xlabel(秒的时间)ylabel(幅度标准”)标题(二阶锁相环的环路闭合'step响应误差率)%*********************************************************** **********锁相环二阶闭环透射率的阶跃响应VCO与输入信号相位之间的百分比%系统类型号= 2;% v2 / thetaiG23 = [ TF(KD KD * [ 0 ]、[ 1 2 * pi *千* 2 * pi *千* KD KD ])]【Y23 T ] = lsim(G23,U,T)图形情节(t,Y23)xlabel(秒的时间)ylabel(幅度标准”)标题(二阶'step响应闭环透光率的B / W的VCO和输入阶段”)%*********************************************************** ***************%锁相环。
如何使用matlab对2阶PLL(锁相环)电路图形进行分析
GH( s ) = Kφ⋅ R1⋅ C1⋅ s + 1 Kv 1 ωz ⋅ s + 1 Kv 1 ⋅ ⋅ = Kφ⋅ ⋅ ⋅ C1⋅ s s N C1⋅ s s N
The angle of open-loop gain is
(
)
N⋅ 1 + ωu_ ωz⋅ A(s ) = ωu_ ωz⋅
s
ωu
+ ωu_ ωz⋅ s + 1 ω ωu u
s
2
The simplified transfer function is acceptable for most situations, except when optimizing the bandwidth. It tends to underestimate the settling time for low phase margins.The inverse Laplace transform of the true transfer function is
Loop Filter
VCO KV s
_______________________________________
Table of Contents
I. II. III. IV. V. VI. VII. VIII. IX. X. XI. XII. XIII. Introduction Inputs Initial Calculations Loop Filter Design Procedure 2nd Order PLL Design Function Optimal Settling Time for 2nd Order PLLs Outputs Noise, Transfer Function, and Settling Time Analysis Small Signal Transfer Functions Phase Noise Calculations Transient Step Response Plots Copyright and Trademark Notice
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 绪论1.1 课题背景及研究意义在现代集成电路中,锁相环(Phase Locked Loop)是一种广泛应用于模拟、数字及数模混合电路系统中的非常重要的电路模块。
该模块用于在通信的接收机中,其作用是对接收到的信号进行处理,并从其中提取某个时钟的相位信息。
或者说,对于接收到的信号,仿制一个时钟信号,使得这两个信号从某种角度来看是同步的(或者说,相干的)。
其作用是使得电路上的时钟和某一外部时钟的相位同步,用于完成两个信号相位同步的自动控制,即锁相。
它是一个闭环的自动控制系统,它将自动频率控制和自动相位控制技术融合,它使我们的世界的一部分有序化,它的输出信号能够自动跟踪输入信号的相位变化,也可以将之称为一个相位差自动跟踪系统,它能够自动跟踪两个信号的相位差,并且靠反馈控制来达到自动调节输出信号相位的目的。
其理论原理早在上世纪30年代无线电技术发展的初期就已出现,至今已逐步渗透到各个领域。
伴随着空间技术的出现,锁相技术大力发展起来,其应用范围已大大拓宽,覆盖了从通信、雷达、计算机到家用电器等各领域。
锁相环在通信和数字系统中可以作为时钟恢复电路应用;在电视和无线通信系统中可以用作频率合成器来选择不同的频道;此外,PLL还可应用于频率调制信号的解调。
总之,PLL已经成为许多电子系统的核心部分。
锁相环路种类繁多,大致可分类如下]1[。
1.按输入信号特点分类[1]恒定输入环路:用于稳频、频率合成等系统。
[2]随动输入环路:用于跟踪解调系统。
2.按环路构成特点分类[1]模拟锁相环路:环路部件全部采用模拟电路,其中鉴相器为模拟乘法器,该类型的锁相环也被称作线性锁相环。
[2]混合锁相环路:即由模拟和数字电路构成,鉴相器由数字电路构成,如异或门、JK触发器等,而其他模块由模拟电路构成。
[3]全数字锁相环路:即由纯数字电路构成,该类型的锁相环的模块完全由数字电路构成而且不包括任何无源器件,如电阻和电容。
[4]集成锁相环路:环路全部构成部件做在一片集成电路中。
[5]软件锁相环路:借助微处理器、FPGA、CPLD或DSP技术,将锁相环的功能用软件来实现。
锁相环电路由简单的模拟电路发展到数模混合电路和全数字电路,由二阶发展到三阶和更高阶。
它属于闭环相位自动控制系统,它具有独特的窄带跟踪性能,既能跟踪输入信号,又能对输入噪声进行窄带滤波。
长久以来,锁相环一直是相位相干通信系统的基石。
模拟锁相环一直占据着统治地位。
随着微电子学领域的快速发展,具备巨大优势的数字化系统开始取代相应的模拟系统。
目前的趋势是用数字化方式设计和实现锁相环。
锁相环被广泛应用于各类电子产品中,在通信系统、数字电路、硬盘驱动电路及CPU等专用芯片中都是一个必不可少的单元,并且直接决定了整个系统的工作稳定性和各项指标的好坏,研究锁相环对我国微电子产业的发展具有重要意义。
1.2 发展历程及国内外研究现状锁相环(PLL-Phase Locked L00P)是自动频率控制和自动相位控制技术的融合。
人们对锁相环的最早研究始于20世纪30年代,其在数学理论方面的原理,30年代无线电技术发展的初期就己出现。
1930年建立了同步控制理论的基础,1932年法国工程师贝尔赛什(Bellescize)发表了锁相环路的数学描述和同步检波论,第一次公开发表了对锁相环路的数学描述。
锁相技术首先被用在同步接收中,为同步检波提供一个与输入信号载波同频的本地参考信号,同步检波能够在低信噪比条件下工作,且没有大信号检波时导致失真的缺点,因而受到人们的关注,但由于电路构成复杂以及成本高等原因,当时没有获得广泛应用。
到了1943年锁相环路第一次应用于黑白电视接收机水平同步电路中,它可以抑制外部噪声对同步信号的干扰,从而避免了由于噪声干扰引起的扫描随机触发使画面抖动的像,使荧光屏上的电视图像稳定清楚。
随后,在彩色电视接收机中锁相电路用来同步彩色脉冲串。
从此,锁相环路开始得到了应用,迅速发展。
五十年代,随着空间技术的发展,由杰费(Jaffe)和里希廷(Rechtin)研制,成功利用锁相环路作为导弹信标的跟踪滤波器,他们第一次发表了含有噪声效应的锁相环路线性理论的文章,并解决了锁相环路最佳设计化问题。
空间技术的发展促进了人们对锁相环路及其理论的进一步探讨,极大地推动了锁相技术的发展。
六十年代初,维特比(Viterbi)研究了无噪声锁相环路的非线性理论问题,发表了相干通信原理的论文。
最初的锁相环都是利用分立元件搭建的,由于技术和成本方面的原因,所以当时只是用于航天、航空等军事和精密测量等领域。
集成电路技术出现后,直到1965年左右,随着半导体技术的发展,第一块锁相环芯片出现之后,锁相环才作为一个低成本的多功能组件开始大量应用各种领域。
最初的锁相环是纯模拟的(APLL),所有的模块都由模拟电路组成,它大多由四象限模拟乘法器来构建环路中的鉴相器,环路滤波器为低通滤波器(由电阻R电容C 组成),压控振荡器的结构多种多样。
由于APLL在稳定工作时,各模块可是线性工作的,所以也称为线性锁相环LPLL(LinearPhase.Hckedbop)。
APLL对正弦特性信号的相位跟踪非常好,它的环路特性主要由鉴相器的特性决定。
其主要用于对信号的调制。
七十年代,林特赛(Undsy)和查理斯(Chanes)在做了大量实验的基础上进行了有噪声的一阶、二阶及高阶PLL的非线性理论分析。
随着人们对锁相技术的理论和应用进行的深入广泛的研究,伴随着数字电路的发展,鉴相器部分开始由数字电路代替,其它部分仍为模拟电路,这种锁相环就是最初的数字锁相环(DPLL),准确的名称为数模混合锁相环(Mixed-single PLL)。
随着数模混合锁相环技术和理的不断发展和完善,其成为了锁相环的主流。
现在随着通信行中对低成本、低功耗、大带宽、高数据传输速率的需求,集成电路不断朝着高集成度、低功耗的方向发展。
低功耗、高工作频率、低电压的锁相环设计中,主要的挑战是设计合适的压控振荡器和高频率的分频器,针对这方面的研究,设计师们不断提出不同的技术,如压控振荡器和分频器由原来的串接改为堆叠结构、DH-PLL结构等,随着设计人员的不断努力,锁相坏的性能不断提高,现在已经有工作频率达50GHz的锁相环,同时也在通信和航空航天等领域中发挥着越来越重要的作要]2[。
从时间上看,锁相环路的大发展出现在20世纪年代以后,而这个时期正是集成电路技术开始迅速发展的时期。
可以说,是在集成锁相环路出现以后,锁相环的工业应用前景才日益的广阔起来。
总的来说,它朝着集成化、多用化、数字化的方向发展。
自1965年第一个锁相环集成产品问世以来,PLL发展极为迅速,产品种类繁多。
2004年5月美国模拟器件(Analog Device)宣布推出了一款频率上限高、性能好的集成数字锁相环芯片ADF4106,它的最高工作频率达到6.0GHz,只需再合理搭配上一、二块集成电路和少量的外围电路,即可构成一个完整的低噪声、低功耗、高稳定度的可靠性很高的频率合成器,它主要应用于无线发射机和接收机中,为上下变频提供本振信号。
2005年11月美国国家半导体(National Semiconductor)宣布推出的LMX2531芯片,号称当时业界最低相位噪声的PLL/VCO二合一芯片。
它采用全球首创的delta-sigma分数N锁相环路结构,工作频率范围从756MHz至2790MHz,噪声可低至-160dBc/Hz以下,最适用于无线传输、网络设备、移动电话及卫星接收系统、汽车电子系统和测试仪表等产品中。
2007年4月,发布了业界首款带高电压的电荷泵PLL频率合成器。
同年7月德州仪器(TI)宣布推出了一系列高度可编程的1:4锁相环时钟发生器。
该系列产品在系统内编程,能以统一的输入频率生成多达九个输出的时钟源。
以其功耗低、引导时间短和无需重新进行系统设计即能方便灵活的更新时钟等优点,该产品降低了各种应用和消费的成本。
2008年8月,推出的LMX2346及LMH2347是两款高性能的频率合成器,用该公司的先进BiCMOS工艺技术制造,采用专有的数字锁相环路技术,可以为超高频(UHF)及甚高频(VHF)的压控振荡器提供极稳定而噪声较少的控制信号。
2009年3月,该公司又推出了LMK04000系列具备级联式PLLatinum锁相环路的精密抖动消除器;LMK01000系列为抖动低于30飞秒的高性能时钟缓冲器、分频器和分配器,支持的时钟频率高达1.6GHz。
美国模拟器件(Analog Device)2004年5月就推出了一款频率上限高、性能好的集成数字锁相环芯片ADF4106,其最高工作频率达到6.0GHz。
有30多年的历史的卓联半导体(Zar Link Semiconductor),它的高性能模拟锁相环可应用于光学网络设备。
芯片ZL30461满足OC-12光学载波12级的通信要求(速率可以达到12*51.84Mb/s=622Mbit/s),ZL30414可工作在光学载波第192级线路速率的光学线路卡上。
该公司芯片适用于SDH/SONET(同步数字体系/同步光学网络)边缘设备中的线路卡设计。
富士通(Fujitsu),该公司的PLL系列芯片产品MB1501主要在无线通信系统中,设计频率合成器,用来产生本地振荡。
该系列产品覆盖了很宽的频率带宽,从100MHz到6GHz。
富士通用的是自己的Bi CMOS RF工艺,同时它也具有相关的其他产品,如VCO,Resonators等。
该公司的PLL共有三类可以选择:Single Integer PLL,Dual Integer PLL-Low Power,以及Fual PLL(SCCT)-Fast Lockup。
相比之下,我国国内少有企业掌握高性能技术,产品更是少见。
但令人可喜的是,东南大学射频与光电集成电路研究所的研究人员通过参与美国计划,设计出了拥有自主知识产权、具有世界先进水平的集成电路芯片。
它们分别属于光纤传输系统中的复接器、激光驱动器、放大器、时钟恢复、数据判决和分接器的核心芯片,形成了完整的系列。
这批通过鉴定的种芯片也通过了美国工程的全流程验证,速率达到了世界范围内“工艺的最高速率。
这种芯片均采用工艺,比以往采用高速或工艺来实现的芯片,具有工艺成熟、易获得、流片成本低、电路功耗小、集成度高等优势,因此具有广阔的产业化前景。
尽管我国国内的IC设计水平相对落后,国内很少有企业掌握高性能PLL核心技术,但近几年,不少国内公司也自主研发了许多PLL产品,成果仍是可喜的。
比如,2009年4月,美芯(MC Devices)公司推出了MCD2006锁相环芯片,大幅提升红外麦克风性能;浩凯微电子公司自主研发出高性能时钟锁相环IP系列产品Haokai_PLL_130SMIC01~04,广泛应用于国内外高性能微处理器和SOC 产品,提供高速时钟以及进行时钟的频率合成。