第七讲_+弹性本构关系
弹塑性本构关系简介

松比)。
塑性材料受外部作用的反应和变形的历史有关(可称为历 史相关性或路径相关性),本构关系应写成增量关系。
应力空间表述的弹塑性本构关系
韧性(塑性)金属材料单向拉伸试验曲线如下 图示意
强度极限
b
屈服上限
L y
U y
e
屈服下限
弹性极限
强化段
软化段 卸载
残余变形
弹性变形
y
y
卸载、反向加载 包辛格效应
屈服面随内变量改变的规律称强化规律。由 材料试验的资料可建立各种强化模型,目前广 泛采用的有:等向强化;随动强化两种模型。
等 向 强
初始屈服面
2
B
f 0(ij ) 0 B
2
C A o1
化
o A 1
o
1
C
D
随
弹性
动
f 0 (ij ) 0
强 化
后继屈服面
f
( ij
,
p ij
,
k)
0
等向强化认为屈服面形状不变,只是作均匀
称后继屈服面,f
(
ij
,
p ij
,
k
)
0
。
如果一点应力的 f (ij ,ipj,,则k)此 点0 处于弹性状态,如
果
f (,ij则,处ipj ,于k)塑 0性状态。
式变张中形量的为i量j间应。存ip力j在张如和ip量j 下k,关统系称为ipj为塑内性变应量ip力j 。张其D量i中j,klkkp与l为塑标ipj 性志应永变久
d ij
Dt ijkl
d
kl
式中 Ditjk为l 切线弹性张量,形式上仍可表为
Dt ijkl
混凝土本构模型

混凝土本构关系模型 一、线弹性本构模型1、 线弹性均质的本构模型当混凝土无裂缝时,可以将混凝土看成线弹性均质材料,用广义胡克定律来表达本构关 系:kl ijkl ij C εσ=式中,ijklC 为材料常数,为一四阶张量,一般有81个常数,如果材料为正交异性时,常数可减少至9个,如材料为各向均质时,可用两个常数λ、μ来表达,λ、μ称为Lame 常数。
ijkk ij ij δλεμεσ+=2当j i =,μλσε23+=kkkk ,代入上式()kk ijij ij σμμλλσσε2232/+-=E 、ν、λ、μ之间的关系如下:()ν213-=E K ,()ν+=12EG GK KGE +=39,()G K G K +-=3223ν 在工程计算中采用下列形式⎪⎭⎫ ⎝⎛+-=E EE 33221111σσνσε 同样可写出22ε、33ε的表达式。
()12121112τντγEG+==同样可写出22γ、33γ的表达式。
如上述各式用张量表示可写成:ij kk ij ij EE δσνσνε-+=1,()()ij kk ij ij E E δενννενσ2111-+-+=用矩阵形式表达时,可写成张量描述用矩阵形式表达,可写成:3、正交异性本构模型 矩阵描述分块矩阵描述1.3横观各向同性弹性体本构模型其中[]D 表达式为kl ijkl ij C εσ=1、Cauchy 模型Cauchy 模型建立的各向同性一一对应的应力应变关系为()kl ij ij F εσ=可展开为:+++=jk ik ij ij ij εεαεαδασ210根据Caley-Hamilton 定理有:jkik ij ij ij εεϕεϕδϕσ210++=但Cauchy 模型在)2,1,0(=i i ϕ时,一般不能满足ij kk ij ij δλεμεσ+=2。
因而,Cauchy 模型在不同加载途径下得到的应变能和余能表达式不是唯一的或者不存在,不能满足弹性体能量守恒定律,但在单调比例加载途径下还是适用的。
第11章-弹塑性力学--本构关系
xy c41 x c42 y c43 z
y y
图4-2
(a)
z
x
x
z
现在引进坐标系 Ox’y’z’, 原坐 标系 Oxyz 绕 y 轴转动 1800 后可与之重合 (图4-2)
新旧坐标轴间的方向余弦
l11 l33 cos180
1 0 0 1 l22 cos 0 1 0 0 l21 l31 l12 l32 l13 l23 cos 90 0
(11-13)
平面应力问题 用应变分量表示 应力分量
E y x 1 2 x E (11-14) y y x 1 2 G
ij ije 2 ij
(11-3’)
以上证明了各向同性的均匀弹性体的弹性常数只有 两个。
现在考虑一种物体各边平行于坐标轴的特殊情况,并 由此导出工程上常用的弹性常数和广义胡克定律。当物 体边界法线方向与 z 轴重合的两对边上有均匀的σz 作 用,其他边均为自由边时,则由材料力学知道
第11章 本构关系
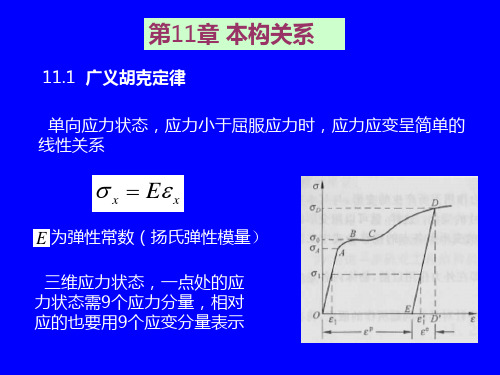
11.1 广义胡克定律 单向应力状态,应力小于屈服应力时,应力应变呈简单的 线性关系
x E x
E 为弹性常数(扬氏弹性模量)
三维应力状态,一点处的应 力状态需9个应力分量,相对 应的也要用9个应变分量表示
07_非线性弹性本构关系_2012_709704628
6
7.1.4 混凝土的本构模型
7.1.5 混凝土的本构模型
常用的混凝土本构模型
理论是完美的,但不是真实的
非线性弹性本构模型(弹性力学) 弹塑性本构模型(塑性力学) 损伤本构模型(损伤力学) 断裂力学本构模型(断裂力学)
以理论模型为基础, 根据试验数据修改理 论模型使之与试验相 吻合
试验是真实的,但不是完美的
保持I1, θ不变,改变J2直至与破坏面相交得到交点
(I1, J2f, θ)
引入调整系数k
k
β=
J2
J2 f
23
σ3 β = σ 3f
0 ≤ k ≤1
24
7.3.2 E-ν 全量模型 全量模型
等效一维应力应变关系
7.3.2 E-ν 全量模型 全量模型
等效一维应力应变关系 割线模量计算式
E
νs
E
Cedolin 模型
σ oct = 3K sε oct τ oct = 3Gsγ oct
0
Ks = ab −ε oct / c + d K0
Gs = pq −γ oct / v + sγ oct + t G0
(1 −ν s ) (1 +ν )(1 − 2ν ) Es s s D=
cosθ cos(31.03D ) σ 1 − 3.466 2 I1 2 J2 D D = − σ θ π cos( ) + = 5.292cos(31.03 − 120 ) − 8 = − 7.905 2 3 3 3 σ − 12.630 cos(31.03D + 120D ) 3 cos(θ + 2 π ) 3
弹性力学_第四章 本构关系

y ν x
其中 是弹性常数,称为泊松比。
Chapter 5.1
§4-1 本构关系概念
线弹性叠加原理
先考虑在各正应力作用
z
z
x
下沿 x 轴的相对伸长,它
由三部分组成,即
y
o
y
z
Chapter 5.1
y
x x x x
x
x
§4-1 本构关系概念
§4-2 广义胡克定律
其中
c11 C11 , c12 C1122 , c14 C1112 , c56 C2331…
即c 的下角标1、2、3、4、5、6分别对应于C 的双指
标11、22、33、12、23、31。应该指出,改写后的
cmn (m, n=1~6) 并不是张量。 由于存在Voigt对称性,所以对于最一般的各向异性 材料,独立的弹性常数共有21个。
弹性张量,共有81个分量。
• 弹性张量的Voigt对称性
Cijkl C jikl Cijlk Cklij
Chapter 5.1
§4-2 广义胡克定律
ij ji
Cijkl kl C jikl kl kl
Cijkl C jikl
kl lk
Cijkl kl Cijlk lk Cijlk kl kl
x x x x
是由于x的作用所产生的相对伸长 其中 x
x
x
E
ν 是由于y的作用所产生的相对缩短 x x E
ν 是由于z的作用所产生的相对缩短 x x
y
z
E
Chapter 5.1
§4-1 本构关系概念
弹塑性本构模型理论课件

。
材料屈服强度影响规律
屈服强度定义
材料开始发生明显塑性变形的最小应力值,反映了材料抵抗塑性变 形的能力。
屈服强度对弹塑性行为的影响
屈服强度越大,材料抵抗塑性变形的能力越强,进入塑性阶段所需 的应力水平越高,材料的塑性变形能力越差。
屈服强度的影响因素
材料的晶体结构、化学成分、温度、应变速率等都会影响屈服强度 的大小。
材料弹性模量影响规律
弹性模量定义
01
材料在弹性阶段内,应力与应变之比,反映了材料抵抗弹性变
形的能力。
弹性模量对弹塑性行为的影响
02
弹性模量越大,材料的刚度越大,相同应力作用下产生的弹性
变形越小,进入塑性阶段所需的应力水平越高。
弹性模量的影响因素
03
材料的晶体结构、化学成分、温度等都会影响弹性模量的大小
弹性阶段
材料在受力初期表现出弹性行为,应 力与应变呈线性关系,卸载后无残余 变形。
屈服阶段
当应力达到屈服强度时,材料进入塑 性阶段,应力不再增加但应变继续增 加,卸载后有残余变形。
强化阶段
材料在塑性阶段表现出应变硬化特性 ,随着塑性应变的增加,屈服强度逐 渐提高。
理想弹塑性模型
无强化阶段的弹塑性模型,屈服后应 力保持恒定,应变无限增加。
通过实验测定金属材料的弹性模量、屈服强度、硬化模量等参 数,为模拟提供准确数据。
利用有限元软件建立金属材料的弹塑性行为模型,进行加载、 卸载等模拟过程。
将模拟结果与实验结果进行对比,验证弹塑性本构模型在金属 材料行为模拟中的准确性和可靠性。
实例二:混凝土结构弹塑性损伤评估
损伤模型选择
针对混凝土结构的损伤特点,选择合适 的弹塑性损伤本构模型,如塑性损伤模
弹塑性力学第四章弹性本构关系资料
产生的x方向应变:
叠加
产生的x方向应变:
同理:
剪应变:
物理方程:
说明:
1.方程表示了各向同性材料的应力与应 变的关系,称为广义Hooke定义。也称 为本构关系或物理方程。
2.方程组在线弹性条件下成立。
. 体积应变与体积弹性模量
令: 则: 令:
sm称为平均应力; q 称为体积应变
eij
1 2G
sij
(4.40)
因为 J1 0, J1' 0 ,所以以上六个式子中独立变量只有5个
因此应力偏张量形式的广义虎克定律,即
eij
1 2G
sij
em
1 3K
sm
(4.41)
用应变表示应力:
或: ✓ 各种弹性常数之间的关系
§4-2 线弹性体本构方程的一般表达式
弹性条件下,应力与应变有唯一确定的对应关系,三维 应力状态下,一点的应力取决于该点的应变状态,应力是应 变的函数(或应变是应力的函数) 6个应力分量可表述为6个应变分量的函数。
式(2)中的系数 有36个.
称为弹性常数,共
由均匀性假设,弹性体各点作用同样应力 时,必产生同样的应变,反之亦然.因此 为 常数,其数值由弹性体材料的性质而定.
式(2)推导过程未引用各向同性假设, 故可适用于极端各向异性体、正交各向异性体、 二维各向同性体以及各向同性体等.
式(2)可用矩阵表示
式(3)可用简写为 称为弹性矩阵.
三、. 弹性常数
1. 极端各向异性体:
物体内的任一点, 沿各个方向的性能都不相 同, 则称为极端各向异性体. (这种物体的材料极 少见)
即使在极端各向异性条件下, 式(2)中的36个 弹性常数也不是全部独立.
弹塑性本构关系简介
2) 势能原理的数学表达
应变能
总势能
Ve=Vε+VP =1/2∫VσijεijdV 外力势能
-∫VFbiuidV- ∫SσFsiuidS = min
2 虚力原理
1)虚力原理的表述
给定位移状态协调的充分必要条件为:对 一切自平衡的虚应力,恒有如下虚功方程成 立(矩阵)
∫V[ε]Tδ[σ]dV=∫Su([L]δ[σ])T [u ]0dS
收敛准则
1、位移模式必须包含单元的刚体位移
2、位移模式必须能包含单元的常应变
3、位移模式在单元内要连续、并使相邻单元间的位移必须协调
满足条件1、2的单元为完备单元
满足条件3的单元为协调单元 多项式位移模式阶次的选择——按照帕斯卡三角形选
几何各向同性:位移模式应与局部坐标系的方位无关
多项式应有偏惠的坐标方向,多项式项数等于单元边界结点的自由度总
变间关系为 octσoct
GKtt
oct 3K s oct oct Gs oct
并有
Gs G
1
a
oct
B c
m
KGss
εoct
oct
K G e s
s (c oct ) p
KG
其中G、K分别为初始切线剪切和体积模量,
B c
为混凝土单轴抗压强度,a、m、c和p为由试验
确定的常数。
POCT
弹性张量Dijkl
ij
Dijkl kl
( 2G 1 2
ij kl
2Giklj ) kl
i 1, j 2, k 1,l 2
12
D1212 12
( 2G 1 2
1212
2G1122 )12
11 1 12 0 22 1
弹性力学—第七章—空间问题的基本理论
几何方程及位移边界条件
采用与平面问题的几何方程一致的推导方法, 可以得到:
位移边界条件:
体应变
单位体积的改变称为体应变,用θ表示:
体应变与位移的关系:
物理方程(1)
:体积应力
体积模量
物理方程(2)
用应变表达应力:
空间问题小结
对于空间问题,一共有15个未知函数,它们 是6个形变分量,6个应力分量,3个位移分量。 而我们也有15个基本方程,它们是6个几何方 程,6个物理方程,3个平衡方程。此外,求 出的解还必须满足位移边界条件以及应力边 界条件。
注:该方程的三个解一 定为实数,即总存在三 个互相垂直的主应力。
主应力(4)
1)在受力物体内任意一点,一定存在三个互相垂 直的应力主面以及对应的三个主应力。 2)在受力物体内的任意一点,三个互相垂直的面 上的正应力之和是不变量(不随坐标系变化),并 且等于该点的三个主应力之和。 3)三个主应力中最大的一个就是该点的最大正应 力,最小的一个就是该点的最小正应力。 4)最大与最小的切应力,在数值上等于最大主应 力与最小主应力之差的一半,作用在通过中间主应 力并且“平分最大主应力与最小主应力的夹角”的 平面上。
弹 性 力 学 及 有 限 元
第七章 空间问题的基本理论
胡 衡
武汉大学土木建筑工程学院
二零零八年五月
平衡方程
空 间 问 题
z
P
y
平 面 问 题
x
应力状态(1)
空 间 问 题
z
n’
pz py
P px
y
平 面 问 题
x
应力状态(2)
z
n’
pz py
P px
y x
注:如果已知空间中一点的六个应力分量,就可以得到任 一斜面上的正应力以及切应力,因此可以说六个应力分量 决定了一点的应力状态。
从力学角度本构关系
从力学角度本构关系
从力学角度来看,材料的本构关系是描述材料力学性能的物理方程或规律。
本构关系可以分为线性本构关系和非线性本构关系。
线性本构关系是指材料的应力与应变之间呈线性关系,即符合胡克定律。
根据胡克定律,应力与应变之间的关系可以用弹性模量或切变模量来描述,这些模量是材料特性的重要参数。
常见的线性本构关系包括弹性模型、弹塑性模型等。
非线性本构关系是指材料的应力与应变之间呈非线性关系,即在外力作用下,材料的变形不再是正比于应力。
非线性本构关系可以更准确地描述材料的行为,如塑性、黏弹性等。
常见的非线性本构关系包括塑性本构关系、粘弹性本构关系等。
无论是线性本构关系还是非线性本构关系,在力学角度上都可以通过实验或理论推导得到。
根据不同材料的力学性质,可以选择不同的本构关系模型来描述材料的行为,在工程应用中起到指导设计和预测材料性能的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面内所有射线方向的弹性性质均相同)。
横观各向同性是正交各向异性的进一步特殊化。
取两个特殊的变换: 将x,y轴互换时,材料弹性关系不变 c11=c22, c13=c23, c55=c66 将坐标系绕z轴旋转450,剪切应力应变关系不变,得 c44=0.5(c11 c12)
• 张量形式表示
ij =Cijklkl
其中Cijkl称为四阶弹性张量,共81个分量。 同样也取
决于坐标系,服从四阶张量的坐标变换定律。
• 弹性张量的对称性
(1)根据应力张量的对称性
Cijkl= Cjikl (σij=σji)
(2)根据应变张量的对称性
Cijkl= Cijlk (εij=εji)
x'
y' z'
1
0 0
0
1 0
0
0 -1
c15=c16=c25=c25=c35=c36=c45=c46=0
x xy xz yx y yz zx zy z
x xy - xz yx y - yz zy z zx
同理,将x轴反向, c14=c16=c24=c26=c34=c36=c46=c56=0 将y轴反向,不产生新的结果 x =c11x+ c12y+ c13z y =c12x+ c22y+ c23z z =c13x+ c23y+ c33z xy = c44xy yz = c55yz zx = c66zx
4.1.1 一般表示
弹性的数学表达:
ij f (ij )
如果材料σij=f(εij)呈单值连续关系(不一定线 性),则称为柯西弹性材料,即为一般意义下 的弹性。
• 应力只取决于应变状态,与达到该状态的过程无关 x= x(x,y,z,xy,yz,zx) y= y (x,y,z,xy,yz,zx) …….
13个独立常数
横观各向异性材料的广义虎克定律可以表示为:
x =c11x+ c12y+ c13z+ c14xy y =c12x+ c22y+ c23z+ c24xy z =c13x+ c23y+ c33z+ c34xy xy =c14x+ c24y+ c34z+ c44xy yz = c55yz+ c56zx zx = c56yz+ c66zx
• 偏应力与偏应变关系
x=2Gx + sx+0=2G(ex +
1 3
)+
将体应力与体应变关系代入: sx=2Gex 同理可得: sy=2Gey sz=2Gez
张量形式表示为 sij = 2Geij 在线弹性范围内,偏应力只产生偏应变,即只产生形状改 变,体积应力只产生体应变,即只产生体积改变。
体内一点P(x,y,z) 的应力和应变为[σ] [ε],则有 [σ] =[C][ε] [C]为一般意义下的各向异性的弹性矩阵。
现将z轴反向,考察其在新坐标系下的本构关系。 由于弹性对称,应力应变关系应该保持不变。 [σ'] =[C][ε'], [σ] =[C][ε] 应力张量的坐标变换: [σ']=[σx σy σz σxy -σyz -σxz]T, [ε']=[εx εy εz εxy -εyz -εxz]T 联立以上各式,比较系数, x y z
有13个独立的弹性常数。 正应变会产生切应力( xy ) 剪应变会产生正应力( x 、 y 、 z )
单斜晶体(如正长石)可简化为横观各向异性弹性体。
• 2. 正交各向异性材料
具有三个相互正交的弹性对称面的材料称为正交各向异性材料。 将z轴反向,由横观各向异性材料的特点可知:
c15=c16=c25=c25=c35=c36=c45=c46=0
广义虎克定律的偏量形式:
sij = 2Geij
0=K
此形式便于塑性分析。
4.1.4 弹性常数的测定
静水压缩实验
11 22
体积模量
1 33 kk 3
kk / 3 3 2G 2 K G kk 3 3
x 0 0 ij 0 0 0 0 0 0 使用物理关系,有弹性模量和泊松比:
独立的分量也是36个。
线弹性本构关系的一般形式:
矩阵形式:
[ ] [C ][ ]
[σ]、[ε]分别为应力和应变列向量, [C]:弹性矩阵,其元素cmn为36个。
x =c11x+ c12y+ c13z+ c14xy+ c15yz+ c16zx y =c21x+ c22y+ c23z+ c24xy+ c25yz+ c26zx z =c31x+ c32y+ c33z+ c34xy+ c35yz+ c36zx xy =c41x+ c42y+ c43z+ c44xy+ c45yz+ c46zx yz =c51x+ c52y+ c53z+ c54xy+ c55yz+ c56zx zx =c61x+ c62y+ c63z+ c64xy+ c65yz+ c66zx
zx= zx (x,y,z,xy,yz,zx)
呈线性单值连续关系的材料性质称为线弹性。
• 对于线性弹性材料,应力与应变是线性关系
x =c11x+ c12y+ c13z+ c14xy+ c15yz+ c16zx
y =c21x+ c22y+ c23z+ c24xy+ c25yz+ c26zx
z =c31x+ c32y+ c33z+ c34xy+ c35yz+ c36zx xy =c41x+ c42y+ c43z+ c44xy+ c45yz+ c46zx yz =c51x+ c52y+ c53z+ c54xy+ c55yz+ c56zx zx =c61x+ c62y+ c63z+ c64xy+ c65yz+ c66zx 系数cmn共36个,取决于材料弹性性质,与坐标系选取有关。 称为广义虎克定律的一般形式。
• 单轴拉伸实验
x G(2G 3 ) E x G
相反,有
y x 2(G )
E (1 )(1 2 )
E G 2(1 )
纯剪实验
0 xy 0 ij yx 0 0 0 0 0
x 1 2 yx 1 zx 2
x 1 2 yx 1 zx 2
1 xy 2 y 1 zy 2
1 xz 2 1 yz 2 z
1 1 xy1 - zy z 2
各向同性弹性体
x =c11x+ c12y+ c12z y =c12x+ c11y+ c12z z =c12x+ c12y+ c11z xy =0.5(c11 c12) xy yz =0.5(c11 c12) yz zx =0.5(c11 c12) zx
令 c12=, 0.5(c11 c12) =G 、G称为Lame(拉梅)弹性常数 x=2Gx + y=2Gy + z=2Gz + =x + y + z 是体积应变 xy =Gxy yz = Gyz zx = Gzx
第四讲 弹性力学基础
胡才博 中国科学院大学地球科学学院 中国科学院计算地球动力学重点实验室
本构关系
4.1 弹性应力应变关系
• • • • • •
4.1.1 一般表示 4.1.2 材料对称性 4.1.3 各向同性弹性体 4.1.4 弹性常数的测定 4.1.5 矩阵形式表达 4.1.6 弹性应变能
张量形式
ij Cijkl kl
cmn和Cijkl的下标关系:
m、n ij、kl 1 11 2 22 3 33 4 12
两种形式是完全等效的。
c22=C2222, c56=C2331
5 23 6 31
根据应力张量和应变张量的对称性,Cijkl也只有36个独立参 数:Cijkl= Cjikl,Cijkl= Cijlk
横观各向同性材料的广义虎克定律可表示为:
x =c11x+ c12y+ c13z y =c12x+ c11y+ c13z
z =c13x+ c13y+ c33z
xy =0.5(c11 c12) xy yz = c55 yz
zx = c55 zx
有5个独立参数 正应变只产生正应力;剪应变只产生剪应力。 工程中, 常用两个杨氏模量(Exy,Ez),两个泊松比(vxy,vz),一个剪切模量(Gz)
地层、层状岩体、复合板材等可简化为横观各向同性弹性体。
4.1.3 各向同性弹性体
• 广义Hooke定律
在横观各向同性材料的基础上,
将x轴与z轴互换,或将y轴与z轴互换时,材料弹性关
系不变, 这种材料称为各向同性材料。
c11=c33, c12=c13, c55=c66=0.5(c11 c12)
于是,独立的弹性常数减少到2个。
x =c11x+ c12y+ c12z y =c12x+ c11y+ c12z z =c12x+ c12y+ c11z