数字信号处理米特拉第四版实验五答案
数字信号处理上机实验 作业结果与说明 实验三、四、五
上机频谱分析过程及结果图 上机实验三:IIR 低通数字滤波器的设计姓名:赵晓磊 学号:赵晓磊 班级:02311301 科目:数字信号处理B一、实验目的1、熟悉冲激响应不变法、双线性变换法设计IIR 数字滤波器的方法。
2、观察对实际正弦组合信号的滤波作用。
二、实验内容及要求1、分别编制采用冲激响应不变法、双线性变换法设计巴特沃思、切贝雪夫I 型,切贝雪夫II 型低通IIR 数字滤波器的程序。
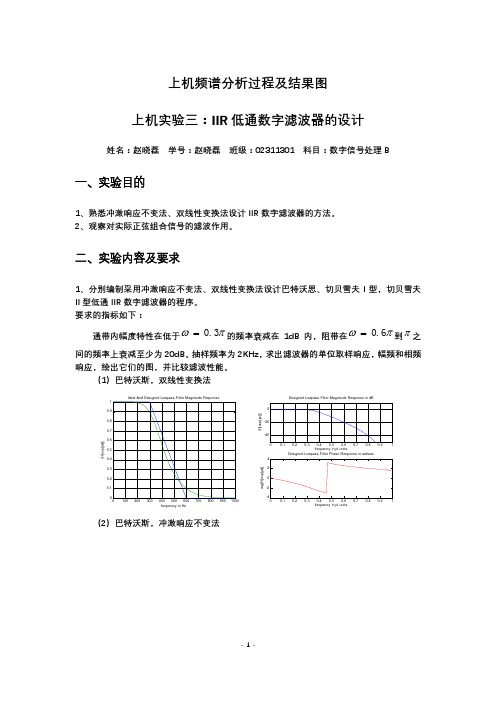
要求的指标如下:通带内幅度特性在低于πω3.0=的频率衰减在1dB 内,阻带在πω6.0=到π之间的频率上衰减至少为20dB 。
抽样频率为2KHz ,求出滤波器的单位取样响应,幅频和相频响应,绘出它们的图,并比较滤波性能。
(1)巴特沃斯,双线性变换法Ideal And Designed Lowpass Filter Magnitude Responsefrequency in Hz|H [e x p (j w )]|frequency in pi units|H [ex p (j w )]|Designed Lowpass Filter Phase Response in radians frequency in pi unitsa r g (H [e x p (j w )](2)巴特沃斯,冲激响应不变法(3)切贝雪夫I 型,双线性变换法(4)切贝雪夫Ⅱ型,双线性变换法综合以上实验结果,可以看出,使用不同的模拟滤波器数字化方法时,滤波器的性能可能产生如下差异:使用冲击响应不变法时,使得数字滤波器的冲激响应完全模仿模拟滤波器的冲激响应,也就是时域逼急良好,而且模拟频率和数字频率之间呈线性关系;但频率响应有混叠效应。
frequency in Hz|H [e x p (j w )]|Designed Lowpass Filter Magnitude Response in dBfrequency in pi units|H [e x p (j w )]|frequency in pi unitsa r g (H [e x p (j w )]Ideal And Designed Lowpass Filter Magnitude Responsefrequency in Hz|H [e x p (j w )]|frequency in pi units|H [e xp (j w )]|frequency in pi unitsa r g (H [e x p (j w )]Ideal And Designed Lowpass Filter Magnitude Responsefrequency in Hz|H [e x p (j w )]|frequency in pi units|H [ex p (j w )]|Designed Lowpass Filter Phase Response in radiansfrequency in pi unitsa r g (H [e x p (j w )]使用双线性变换法时,克服了多值映射的关系,避免了频率响应的混叠现象;在零频率附近,频率关系接近于线性关系,高频处有较大的非线性失真。
数字信号处理,第5章课后习题答案

第五章习题与上机题5.1 已知序列12()(),0 1 , ()()()nx n a u n a x n u n u n N =<<=--,分别求它们的自相关函数,并证明二者都是偶对称的实序列。
解:111()()()()()nn mx n n r m x n x n m a u n au n m ∞∞-=-∞=-∞=-=-∑∑当0m ≥时,122()1mmnx n ma r m aaa∞-===-∑ 当0m <时,122()1m mnx n a r m aaa -∞-===-∑ 所以,12()1mx ar m a =-2 ()()()()N x n u n u n N R n =--=22210121()()()()()1,0 =1,00, =()(1)x NN n n N mn N n m N r m x n x n m Rn R n m N m N m N m m Nm N m R m N ∞∞=-∞=-∞--=-=-=-=-⎧=--<<⎪⎪⎪⎪=-≤<⎨⎪⎪⎪⎪⎩-+-∑∑∑∑其他从1()x r m 和2()x r m 的表达式可以看出二者都是偶对称的实序列。
5.2 设()e()nTx n u n -=,T 为采样间隔。
求()x n 的自相关函数()x r m 。
解:解:()()()()e()e ()nTn m T x n n r m x n x n m u n u n m ∞∞---=-∞=-∞=-=-∑∑用5.1题计算1()x r m 的相同方法可得2e()1e m Tx Tr m --=-5.3 已知12()sin(2)sin(2)s s x n A f nT B f nT ππ=+,其中12,,,A B f f 均为常数。
求()x n 的自相关函数()x r m 。
解:解:()x n 可表为)()()(n v n u n x +=的形式,其中)2sin()(11s nT f A n u π=,=)(n v 22sin(2)s A f nT π,)(),(n v n u 的周期分别为 s T f N 111=,sT f N 221=,()x n 的周期N 则是21,N N 的最小公倍数。
数字信号处理教程第四版答案
z2 x (n ) [z ]z 0 8 1 (z )z 4
当n 0时,围线内部没有极点 ,故x(n) 0
1 x(n) 7 u(n 1) 8(n) 4
n
z2 部分分式法: X(z) 1 z 4 X(z) z2 A1 A2 故 1 1 z z (z )z z 4 4
数 字 信 号 处 理
第二章 z变换与离散时间傅里叶 变换(DTFT)
2.2 z变换的定义与收敛域
序列x(ห้องสมุดไป่ตู้)的z变换定义为:
n x ( n ) z
X ( z)
n
对任意给定序列x(n),使其z变换收敛的所有z值的集合 称为X(z)的收敛域,上式收敛的充分必要条件是满足绝 对可和
1 z2 A1 [(z ) ] 1 7 1 4 (z )z z 4 4 z2 A 2 [z ] 8 1 z 0 (z )z 4
n
7 1 X( z ) 8,| z | 1 1 4 1 z 4
1 x(n) 7 u(n 1) 8(n) 4
1 | z | 4
n 1
jIm[z]
1/4 o
Re[z]
当n 1时,分母中z的阶次比分子中 z的阶次高两阶 或两阶以上,可用围线 外部极点求解
1 (z 2)z n 1 1 n x (n ) [(z ) ] 1 7( ) z 1 4 4 4 z 4
z2 当n 0时,F(z) ,此时围线内部有一阶 极点z 0 1 (z )z 4
1 n x (n ) ( ) u (n ) 2
部分分式法: Z[a n u (n )]
1 , | z || a | 1 1 az
数字信号处理课后习题答案(全)1-7章
第 1 章 时域离散信号和时域离散系统
(6) y(n)=x(n2)
令输入为
输出为
x(n-n0)
y′(n)=x((n-n0)2) y(n-n0)=x((n-n0)2)=y′(n) 故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n2)+bx2(n2) =aT[x1(n)]+bT[x2(n)]
第 1 章 时域离散信号和时域离散系统
题4解图(一)
第 1 章 时域离散信号和时域离散系统
题4解图(二)
第 1 章 时域离散信号和时域离散系统
题4解图(三)
第 1 章 时域离散信号和时域离散系统
(4) 很容易证明: x(n)=x1(n)=xe(n)+xo(n)
上面等式说明实序列可以分解成偶对称序列和奇对称序列。 偶对称序列可 以用题中(2)的公式计算, 奇对称序列可以用题中(3)的公式计算。
(2) y(n)=x(n)+x(nN+1)k 0
(3) y(n)= x(k)
(4) y(n)=x(n-nn0)n0
(5) y(n)=ex(n)
k nn0
第 1 章 时域离散信号和时域离散系统
解:(1)只要N≥1, 该系统就是因果系统, 因为输出 只与n时刻的和n时刻以前的输入有关。
如果|x(n)|≤M, 则|y(n)|≤M, (2) 该系统是非因果系统, 因为n时间的输出还和n时间以 后((n+1)时间)的输入有关。如果|x(n)|≤M, 则 |y(n)|≤|x(n)|+|x(n+1)|≤2M,
=2x(n)+x(n-1)+ x(n-2)
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
自动化_数字信号处理实验5答案
实验五 IIR滤波器设计一、实验目的1. 掌握冲激响应不变法和双线性变换法设计IIR数字滤波器的原理和方法;2. 观察双线性变换法和冲激响应不变法设计的滤波器的频域特性,了解双线性变换法和冲激响应不变法的特点和区别。
二、实验仪器1. 计算机2. MATLAB软件三、预习要求理解冲激响应不变法,双线性变换法,掌握常用 matlab 程序。
四、实验原理1. IIR数字滤波器一般为线性移不变的因果离散系统,N阶IIR滤波器的传递函数为:,式中系数至少有一个不为0。
IIR数字滤波器的设计通常利用模拟滤波器作为原型滤波器,直接由模拟滤波器的频率响经过冲激响应不变法或双线性变换法转换成IIR数字滤波器。
2. 常用模拟原型滤波器(1)巴特沃斯滤波器巴特沃斯滤波器通带和阻带都单调衰减,所有结束的幅度函数-3dB点为同一点。
其幅度响应为:,式中N为滤波器阶数,通带截止频率。
(2)切比雪夫Ⅰ型滤波器切比雪夫Ⅰ型滤波器在通带呈现等波纹特性,阻带单调衰减,其幅度响应为:,式中N为滤波器阶数;,表示通带波纹大小,越大,波纹越大;为截止频率,不一定为3dB带宽;为N阶Chebyshev多项式。
(3)切比雪夫Ⅱ型滤波器切比雪夫Ⅱ型滤波器在阻带呈现等波纹特性,通带单调衰减,其幅度响应为:,式中是阻带衰减达到一定数值时的最低频率。
(4)椭圆滤波器椭圆滤波器在通带和阻带都呈现波纹特性,在带内均匀波动,具有最快的滚降。
,式中为椭圆函数。
3. 冲激响应不变法所谓冲激响应不变法就是使数字滤波器的单位冲激响应序列等于模拟滤波器的单位冲激响应和的采样值,即:,其中,T为采样周期。
令为模拟系统传递函数,且,则冲激响应不变法得到的数字滤波器传递函数。
冲激响应不变法的特点是:(1)时域逼近特性良好;(2)模拟频率和数字频率呈线性关系。
(3)存在频率混叠效应,故只适用于限带的模拟滤波器。
在 MATLAB 中,可用函数 impinvar 实现从模拟滤波器到数字滤波器的冲激响应不变映射,调用格式为:[bz,az]=impinvar(b,a,fs)[bz,az]=impinvar(b,a)其中,b、a 分别为模拟滤波器的分子和分母多项式系数向量;fs为采样频率(Hz),缺省值 fs=1Hz;bz、az分别为数字滤波器分子和分母多项式系数向量。
数字信号处理课后习题答案(全)1-7章
2. 给定信号:
2n+5
-4≤n≤-1
(x(n)=
6
0
0≤n≤4 其它
(1) 画出x(n)序列的波形, 标上各序列值;
(2) 试用延迟的单位脉冲序列及其加权和表示x(n)序列;
第 1 章 时域离散信号和时域离散系统
(3) 令x1(n)=2x(n-2), 试画出x1(n)波形; (4) 令x2(n)=2x(n+2), 试画出x2(n)波形; (5) 令x3(n)=x(2-n), 试画出x3(n)波形。 解: (1) x(n)序列的波形如题2解图(一)所示。 (2) x(n)=-3δ(n+4)-δ(n+3)+δ(n+2)+3δ(n+1)+6δ(n)
第 1 章 时域离散信号和时域离散系统
题8解图(一)
第 1 章 时域离散信号和时域离散系统
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3)
h(n)=2δ(n)+δ(n-1)+ δ(n-2)
由于
x(n)*δ(n)=x(n)
1
x(n)*Aδ(n-k)=Ax(n-k)
2
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ(n-2) 1 2
, 这是2π有理1数4, 因此是周期序
3
(2) 因为ω=
,
所以
1
8
=16π, 这是无理数, 因此是非周期序列。
2π
第 1 章 时域离散信号和时域离散系统
4. 对题1图给出的x(n)要求:
(1) 画出x(-n)的波形;
数字信号处理实验五答案.doc
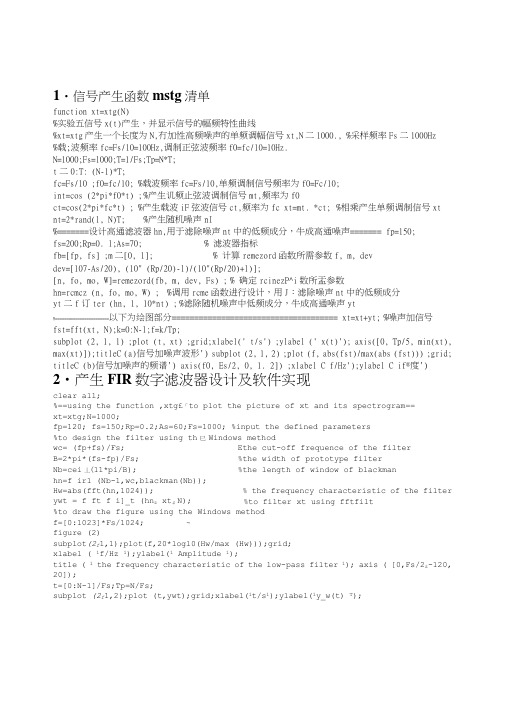
1・信号产生函数mstg清单function xt=xtg(N)%实验五信号x(t)产生,并显示信号的幅频特性曲线%xt=xtg产生一个长度为N,冇加性高频噪声的单频调幅信号xt,N二1000., %采样频率Fs二1000Hz%载;波频率fc=Fs/10=100Hz,调制正弦波频率f0=fc/10=10Hz.N=1000;Fs=l000;T=1/Fs;Tp=N*T;t二0:T: (N-1)*T;fc=Fs/10 ;f0=fc/10; %载波频率fc=Fs/10,单频调制信号频率为f0=Fc/10;int=cos (2*pi*f0*t) ; %产生讥频止弦波调制信号mt,频率为f0ct=cos(2*pi*fc*t) ; %产生载波iF弦波信号ct,频率为fc xt=mt. *ct; %相乘产生单频调制信号xtnt=2*rand(l, N)T; %产生随机噪声nI%=======设计高通滤波器hn,用于滤除噪声nt中的低频成分,牛成高通噪声======= fp=150;fs=200;Rp=0. l;As=70; % 滤波器指标fb=[fp, fs] ;m二[0, 1]; % 计算remezord函数所需参数f, m, devdev=[107-As/20), (10" (Rp/20)-l)/(10"(Rp/20)+l)];[n, fo, mo, W]=remezord(fb, m, dev, Fs) ; % 确定rcinezP^i数所盂参数hn=rcmcz (n, fo, mo, W) ; %调用rcme函数进行设计,用J:滤除噪声nt中的低频成分yt二f订ter (hn, 1, 10*nt) ; %滤除随机噪声中低频成分,牛成高通噪声yt%========================以下为绘图部分===================================== xt=xt+yt; %噪声加信号fst=fft(xt, N);k=0:N-l;f=k/Tp;subplot (2, 1, 1) ;plot (t, xt) ;grid;xlabel(' t/s') ;ylabel (' x(t)'); axis([0, Tp/5, min(xt), max(xt)]);titleC (a)信号加噪声波形') subplot (2, 1, 2) ;plot (f, abs(fst)/max(abs (fst))) ;grid; titleC (b)信号加噪声的频谱') axis(f0, Es/2, 0, 1. 2]) ;xlabel C f/Hz');ylabel C if®度') 2•产生FIR数字滤波器设计及软件实现clear all;%==using the function ,xtg£「to plot the picture of xt and its spectrogram==xt=xtg;N=1000;fp=120; fs=150;Rp=0.2;As=60;Fs=1000; %input the defined parameters%to design the filter using th巳Windows methodwc= (fp+fs)/Fs; Ethe cut-off frequence of the filterB=2*pi*(fs-fp)/Fs; %the width of prototype filterNb=cei丄(11*pi/B); %the length of window of blackmanhn=f ir1 (Nb-1,wc,blackman(Nb));Hw=abs(fft(hn,1024)); % the frequency characteristic of the filter ywt = f ft f i]_t (hn z xt』N);%to filter xt using fftfilt%to draw the figure using the Windows methodf=[0:1023]*Fs/1024; ~figure (2)subplot(2f1,1);plot(f,20*logl0(Hw/max (Hw)));grid;xlabel ( 1f/Hz 1);ylabel(1 Amplitude 1);title ( 1 the frequency characteristic of the low-pass filter 1); axis ( [0,Fs/2z-120, 20]);t=[0:N-1]/Fs;Tp=N/Fs;subplot (2f1,2);plot (t,ywt);grid;xlabel(1t/s1);ylabel(1y_w(t) T);title ( 1 the signal waves after filtering noises 1);axis([0,Tp/2,-1,1]);%to design the filter using the best uniform approximation method fb=[fp z fs];m=[1,0];% define the parameters of remezorddev=[ (10A (Rp/20)-1)/(10A(Rp/20)+1),10A(-As/20)];[Ne z fo, mo z W]=remezord(fb,m, dev,Fs); %define the parameters of remez hn=remez(Ne,fmo z W);Hw=abs(fft(hn z1024)); % the frequency characteristic of the filteryet=fft£i1t(hn/Xt’N);%to filter xt using filt%to draw the figure using the best uniform approximation methodf igure(3);subplot(2,1,1);f=[0:1023]*Fs/1024;plot (f, 20*logl0 (Hw/max (Hw) ) ) ; grid; xlabel ( 1 f/Hz ' ) ; ylabel ( f Amplitude 1 ); title ( 1 the frequency characteristic of the low-pass filter 1);axis([0,Fs/2,-80,10]);subplot (2, 1 z 2 ) ; plot (t, yet) ; grid; xlabel ( 11/s ' ) ; ylabel ( ' y_e (t) 1 ); title ( 1 the signal waves after filtering noises');axis([0,Tp/2,-1,1]);⑻信号加噪声波形105e oX-5-100 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2t/s(b)信号加噪声的频谱1® 0.50 50 100 150 200 250 300 350 400 450 500f/Hz-800 50 100 150 200 250 300 350400 450 500f/Hzthe signal waws after filtering noises050.5 0 0 0.05 0.1 0.15 0.2 0.250.3 0.35 0.4 0.45 0.5 t/s 0-20-40-60the frequency characteristic of the low-pass filter。
数字信号处理习题及解答..
X (e j0 )
n 3
x ( n) 6
x(n)e jn
7
π
π
X (e j )d x(0) 2π 4π
X (e jπ )
n
n 3
7
(1) n x(n) 2
数字信号处理习题及解答
第三章 信号的傅里叶变换 2 试求如下序列的傅里叶变换: (1) x1(n)=δ(n-3)
第一章离散时间信号与离散时间系统数字信号处理习题及解答2解答第一章离散时间信号与离散时间系统数字信号处理习题及解答3第一章离散时间信号与离散时间系统数字信号处理习题及解答3解答第一章离散时间信号与离散时间系统数字信号处理习题及解答4第一章离散时间信号与离散时间系统数字信号处理习题及解答4解答第一章离散时间信号与离散时间系统数字信号处理习题及解答4解答第一章离散时间信号与离散时间系统数字信号处理习题及解答1第二章z变换及离散时间系统分析数字信号处理习题及解答1解答第二章z变换及离散时间系统分析数字信号处理习题及解答1解答第二章z变换及离散时间系统分析数字信号处理习题及解答2第二章z变换及离散时间系统分析数字信号处理习题及解答2解答第二章z变换及离散时间系统分析数字信号处理习题及解答2解答第二章z变换及离散时间系统分析数字信号处理习题及解答2第二章z变换及离散时间系统分析数字信号处理习题及解答2解答第二章z变换及离散时间系统分析数字信号处理习题及解答2解答第二章z变换及离散时间系统分析数字信号处理习题及解答2解答第二章z变换及离散时间系统分析数字信号处理习题及解答2解答第二章z变换及离散时间系统分析数字信号处理习题及解答3已知第二章z变换及离散时间系统分析112122113??????zzzx求出对应xz的各种可能的序列表达式
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
50
100
150
200
250
Time index n
T = 0.02 msec
Continuous-time signal xa(t) 1
0.5
0
-0.5
-1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time, msec Discrete-time signal x[n]
Q5.5 The plots of the continuous-time sinusoidal signal of frequency 3 kHz and its sampled version
generated by running a modified Program P5_1 are shown below: (NOTE: the book is in error about the frequency. Since the “t” in the program is in units of msec, the frequency here is 3 kHz, not 3 Hz.)
Time index n
Amplitude
Based on these results we make the following observations – In all three cases, we have T = 0.1 msec. Originally, in Q5.1. we had f = 13kHz. This gives a maximum sampling period of 1/26 » 0.0385 msec to satisfy the Nyquist criterion, as we observed above.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time index n
Amplitude
Amplitude
4
Based on these results we make the following observations – Since the “analog” waveform goes through 13 cycles in the 1 msec shown in the graph, there will be aliasing unless we get at least two samples per cycle, or 26 samples total on the graph. 26 samples in 1 msec is a sampling rate of 26 kHz, which requires T < 1/26 » 0.0385 msec to avoid
aliasing. With T=0.004 msec. there is no aliasing and the discrete-time waveform has an appearance that is very similar to that of the “analog” waveform. With T=0.02 msec, there is still no aliasing, but the sampling rate is much closer to being “critical,” i.e., much closer to the Nyquist rate. Consequently, the appearance of the discrete-time waveform is less similar to the “analog waveform,” although perfect reconstruction is still possible. With T=0.15 msec, there is significant aliasing and the discrete-time waveform has the appearance of an “analog” waveform of much lower frequency. Finally, with T=0.2 msec, there is again severe aliasing which causes the discrete-time waveform to have the appearance of an “analog” waveform of lower frequency.
The sampling period in seconds is - T = 0.1 msec.
Q5.3 The effects of the two axis commands are – The first axis command sets the minimum and maximum values for the x-axis and the y-axis in the upper plot. The second axis command does the same thing for the lower plot. In each axis command, the first two parameters are the minimum and maximum values for the x-axis. The third and fourth parameters are the minimum and maximum values for the y-axis.
Q5.4
The plots of the continuous-time signal and its sampled version generated by running Program
P5_1 for the following four values of the sampling period are shown below:
Amplitude
Continuous-time signal xa(t) 1
0.5
0
-0.5
-1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time, msec Discrete-time signal x[n]
1
0.5
0
-0.5
-1
0
1
2
3
4
5
6
7
8
9 10
2
Amplitude
Amplitude
T = 0.004 msec
1 0.5
0 -0.5
-1 0
1 0.5
0 -0.5
-1 0
Continuous-time signal xa(t)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time, msec
Discrete-time signal x[n]
1
Answers:
Q5.1
The plots of the continuous-time signal and its sampled version generated by running Program
P5_1 are shown below:
Amplitude
Continuous-time signal xa(t) 1
A copy of Program P5_1 is given below:
% Program P5_1 % Illustration of the Sampling Process % in the Time-Domain clf; t = 0:0.0005:1; f = 13; xa = cos(2*pi*f*t); subplot(2,1,1) plot(t,xa);grid xlabel('Time, msec');ylabel('Amplitude'); title('Continuous-time signal x_{a}(t)'); axis([0 1 -1.2 1.2]) subplot(2,1,2); T = 0.1; n = 0:T:1; xs = cos(2*pi*f*n); k = 0:length(n)-1; stem(k,xs);grid; xlabel('Time index n');ylabel('Amplitude'); title('Discrete-time signal x[n]'); axis([0 (length(n)-1) -1.2 1.2])
1
0.5
0
-0.5
-1
0
1
2
3
4
5
6
Time index n
T = 0.2 msec
Continuous-time signal xa(t) 1 0.5 0 -0.5 -1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time, msec
Discrete-time signal x[n] 1 0.5 0 -0.5 -1
Time index n
Amplitude
5
The plots of the continuous-time sinusoidal signal of frequency 7 kHz and its sampled version
generated by running a modified Program P5_1 are shown below: (Again, the book is in error. For the same reason as above, the frequency here is 7 kHz, not 7 Hz.)