高等机构学第三章 机构结构理论(张)
高等机构学 03 运动学
(5)
3-CS并联角台机构位置分析
位置反解
由于球面副位于一个以C副为中 心线的圆柱面上,则球面副中心点 的坐标应满足如下的约束方程
a12y a12z M 2 2 2 2 a2 x a2 z M 2 2 2 a a M 3y 3x
(6)
3-CS并联角台机构位置分析
位置反解
ox a1 o y oz 6 Mr11 3 6 Mr21 3 6 Mr31 3 ox a2 o y oz 6 Mr11 6 6 Mr21 6 6 Mr31 6 2 Mr12 2 2 Mr22 2 2 Mr32 2 ox a3 o y oz 6 Mr11 6 6 Mr21 6 6 Mr31 6 2 Mr12 2 2 Mr22 2 2 Mr32 2
位置反解
三个球面副在动坐标系中的坐标为:
6 M 3 0 a1 0 6M 6 2M 2 a2 0 6M 6 2M 2 a3 0
(2)
假设动坐标系的原点在定坐标系中的坐标为
这三个约束力在空间交错分布,相互之间线性无 关,约束了机构动平台的三个移动自由由度,机构 只剩下三个“转动”自由度。
3-RPS并联角台机构位置分析
位置反解
机构动平台有3个转动自由度, 三个独立参数可以确定机构的位 姿。 在进行反解时,动平台的姿态 是已知的。可用一个姿态矩阵描 述为:
r11 r12 R r21 r22 r31 r32 r13 r23 r33
《高等机构学》PPT课件

U1x
A
CS1x DS1y E B 2 A
CS1y DS1x F
U1y
A
CS1y DS1x F B 2 A
CS1x DS1y E
U1x 3.182;U1y 4.436
u U1x2 U1y2 (3.182)2 (4.436)2 5.46
arcsin U1y arcsin 4..436 125.7
高等机构学
学号: 主讲:
2、挡风玻璃刮水器
自由度的计算
•
M 3(L 1) 2J1 J2 L6 J1 7 M 3 (6 1) 2 7 1
(e) 折叠椅
L=4; J1=2; M=3(4-1)-2*4=1
折叠椅的结构简图
折叠椅的实物图
(m)可折叠的汽车收音机天线
L=4; J1=3; M=3(4-1)-2*3=3 可折叠的汽车收音机天线的结构简图 可折叠的汽车收音机天线的实
3
d3
dt
d 23
dt 2
故可得
AP
A Pt
A
n P
0 AP *3 je j(331o ) L222 je j2 AP *32 je j(331o )
AP *3[-sin(3 31o ) jcos(3 31o )]
L222[cos2 jsin2 ] AP *32[cos(3 31o ) jsin(3 31o )]
感谢下 载
W1x
A
CZ1x DZ1y E B 2 A
CZ1y DZ1x F
W1y
A
CZ1y DZ1x F B 2 A
CZ1x DZ1y E
W1x 1.468;W1y 3.362
w W1x2 W1y2 (1.468)2 (3.362)2 3.67
高等机构学第三章
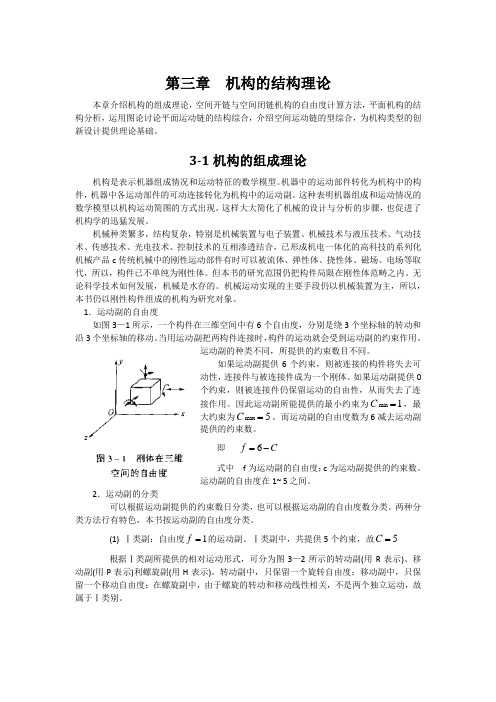
第三章 机构的结构理论本章介绍机构的组成理论,空间开链与空间闭链机构的自由度计算方法,平面机构的结构分析,运用图论讨论平面运动链的结构综合,介绍空间运动链的型综合,为机构类型的创新设计提供理论基础。
3-1机构的组成理论机构是表示机器组成情况和运动特征的数学模型。
机器中的运动部件转化为机构中的构 件,机器中各运动部件的可动连接转化为机构中的运动副。
这种表明机器组成和运动情况的 数学模型以机构运动简图的方式出现。
这样大大简化了机械的设计与分析的步骤,也促进了 机构学的迅猛发展。
机械种类繁多,结构复杂,特别是机械装置与电子装置、机械技术与液压技术、气动技术、传感技术、光电技术、控制技术的互相渗透结合,已形成机电一体化的高科技的系列化机械产品c 传统机械中的刚性运动部件有时可以被流体、弹性体、挠性体、磁场、电场等取代,所以,构件已不单纯为刚性体。
但本书的研究范围仍把构件局限在刚性体范畴之内。
无论科学技术如何发展,机械是水存的。
机械运动实现的主要手段仍以机械装置为主,所以,本书仍以刚性构件组成的机构为研究对象。
1.运动副的自由度如图3—1所示,一个构件在三维空间中有6个自由度,分别是绕3个坐标轴的转动和沿3个坐标轴的移动。
当用运动副把两构件连接时,构件的运动就会受到运动副的约束作用。
运动副的种类不同,所提供的约束数目不同。
如果运动副提供6个约束,则被连接的构件将失去可动性,连接件与被连接件成为一个刚体。
如果运动副提供0个约束,则被连接件仍保留运动的自由性,从而失去了连接作用。
因此运动副所能提供的最小约束为min 1C =,最大约束为max 5C =。
而运动副的自由度数为6减去运动副提供的约束数。
即 6f C =-式中 f 为运动副的自由度;c 为运动副提供的约束数。
运动副的自由度在1~ 5之间。
2.运动副的分类可以根据运动副提供的约束数日分类,也可以根据运动副的自由度数分类。
两种分类方法行有特色,本书按运动副的自由度分类。
高等机构学 03

运动影响系数原理
虚设机构法
容易写出分支1的影响系数矩阵
S1 S2 0 G1 S1 ( P R1 ) S2 ( P R2 ) S3 S4 S5 S6 S4 ( P R4 ) S5 ( P R5 ) S6 ( P R6 )
其中
S1 (0 0 1) R1 A 2 S (1 0 0) R2 A 2 R R R R a S3 (a - A) a - A 4 5 6 3 S 4 S3 S5 S 2 S 6 ( S5 S 4 ) S5 S 4
运动影响系数原理
虚设机构法
(1) -1 (1) [G ]1: 0 (2) (2) -1 0 [G ]1: (3) -1 (3) [G ]1: 0 (1) (1) -1 u 2 [G ]3: (2) -1 (2) [G ]3: 2 (3) (3) -1 2 [G ]3:
[ S2 ( P R2 )]
l1 sin 1 l2 sin(1 2 ) l2 sin(1 2 ) [G ] l1 cos 1 l2 cos(1 2 ) l2 cos(1 2 ) 0 0
H1:1 S1 S1 ( P R1 ) l1 cos 1 l2 cos(1 2 ) l1 sin 1 l2 sin(1 2 ) 0 H1:2 S1 S 2 ( P R2 ) l2 cos(1 2 ) l2 sin(1 2 ) 0 H 2:1 S1 S 2 ( P R2 ) l2 cos(1 2 ) l2 sin(1 2 ) 0
《高等机构学》课件
机构组成
机构是由若干个构件通过一定的方式联接而成的,构件可以是杆、齿轮、轴承等。
机构组成的基本元素包括输入、输出和传动系统,其中传动系统是实现运动和力传 递的核心部分。
机构的运动形式包括平动、转动和复合运动,这些运动形式是由构件之间的相对运 动关系决定的。
机构分类
根据机构的结构特点,可以将机构分为简单机构和复杂机构,其中简单 机构包括连杆机构、齿轮机构等,复杂机构包括机器人、加工中心等。
旨在寻找满足特定性能要求的机构设计方案。
机构优化设计目标
02
提高机构性能、降低制造成本、优化结构参数等。
机构优化设计流程
03
建立数学模型、选择优化算法、进行优化计算、验证优化结果
。
机构优化设计方法
尺寸优化
通过调整机构中零部件的尺寸参数,以达到 优化性能的目的。
形状优化
改变机构中零部件的形状,以改善机构的运 动性能和受力情况。
随着技术的不断发展,其他新型机构的应 用领域将更加广泛,其结构形式和运动特 性也将不断优化。
THANKS
感谢观看
机构选型
机构选型需要考虑的因素包括工作原理、结构特点、材料、制造成本等。
在实际应用中,需要根据具体的工作要求和条件选择合适的机构类型,以 达到最佳的工作效果和经济性。
机构选型还需要考虑机构的可靠性和维护性,选择可靠性高、维护方便的 机构可以降低使用成本和维护成本。
03
机构运动学
机构运动学基本概念
使用计算机仿真技术,模 拟机构的动态行为。
通过微分几何和线性代数 的知识,分析机构中各点
的速度和加速度。
动态仿真与优化
通过优化算法,改进机构 的结构和参数,提高机构
第2讲 机构的结构理论

➢ 开链机构 ✓ 具有固定构件的开式运动链。 ✓ 开链机构中,活动构件数目n和运动副数目P相等。
。
二、机构的自由度
平面机构的自由度: F=3n-2pl-ph
1.空间闭链机构的自由度
F 6n 5 p1 4 p2 3p3 2 p4 p5
6n 6 p1 p1 6 p2 2 p2 6 p3 3p3 6 p4 4 p4 6 p5 5p5
P
L
F fi i f p ft 0
i1
i1
L
i — 各闭环中末杆自由度之和
i 1
✓ 例:计算机构自由度。 RSS4R机构中4R轴线平行
λⅠ=3、fpⅠ=1 λⅡ=6、ftⅡ=1
7
fi 4 2 2 3 12
i1
P
L
F fi i f p ft 0
i1
i1
=12-3-6-1-1=1
⑴Ⅰ类副
✓ 自由度f=1的运动副。
✓ C=5 ✓ 转动副(R):
✓ 移动副(P):
✓ 螺旋副(H):
⑵Ⅱ类副
✓ 自由度f=2的运动副。
✓ C=4
✓ 圆柱副(C):
✓ 球销副(S´):
⑶Ⅲ类副
✓ 自由度f=3的运动副。
✓ C=3 ✓ 球面副(S):
✓ 平面副(E):
✓ 销轴圆柱副:
(C)
运动简图
约束数 5 5 5 4 4 3 3
2
1
2.运动链
✓ 若干构件通过运动副的连接而组成的可动构件系统。 ➢ 闭链 ✓ 构成封闭环式的运动链。 ✓ 闭链中,每个构件上至少有2个运动副元素。
➢ 开链 ✓ 用运动副连接的构件没有构成首尾封闭的系统。 ✓ 开链中,有一个构件上仅有一个运动副。
《高等机构学》课件
课堂参与 小组项目 个人报告 期末考试
20% 30% 30% 20%
结语
通过学习《高等机构学》课程,你将掌握机构的运作和组织原则,为未来的职业发展打下坚实的基础。
学习资源
教科书
指定教科书提供了详细的机构学知识和案例研 究,帮助学生深入学习和理解。
学术期刊
通过阅读学术期刊,学生可以了解最新的机构 学研究和实践。
在线学习平台
提供在线课程、讲座和练习资源,使学生能够 随时随地学习和复习。
虚拟学习社区
参与虚拟学习社区,与同学和教师交流经验和 观点,拓宽学习视野。
课程评估
《高等机构学》PPT课件
敬爱的同学们,欢迎大家参与今天的《高等机构学》PPT课件。在本课程中, 我们将深入探讨机构的运作和组织原则。
课程简介
通过本课程,学生将理解机构的定义、类型和重要性,以及机构对社会和组织的影响。
课程目标
1 学习机构理论
理解机构的核心理论和概 念,包括组织结构、权力 关系和组织文化。
2 分析机构中的问题
掌握分析机构中常见问题 的方法,如决策制定、冲 突解决和变革管理。
3 提升组织效能
学习提高机构效能的策略, 如领导力发展、团队建设 和绩效管理。
课程内容
组织结构
研究不同类型的组织结构,如功 能性、分工和矩阵结构,并了解 其特点和适用性。
团队合作
分析团队合作的关键要素,如协 作、沟通和有效决策,以提高组 织的协同效应。
组织绩效
探讨组织绩效的评估方法,包括 关键绩效指标的设定和绩效管理 的实施。
教学方法
1
讲座和案例分析
通过讲座和案例分析,让学生理解机构理论,并应用于实际场景中。
2
高等机构学

螺旋副 f=117.rm
球销副 f=218.rm
滚转副f=219.rm
球面副f=320.rm
圆柱副f=424.rm
点接触高副f=5 22.rm
第一章 机构结构理论
1.2 空间机构的自由度 2、运动副的分类
第一章 机构结构理论
1.2 空间机构的自由度 2、运动副的分类
• Ⅱ级组
Ⅲ级组
Ⅳ级组
第一章 机构结构理论
1.3 平面机构的分类方法(按杆组分级)(仅限于分析平面低副) 2. 杆组的分类:只讨论平面机构,高副低代
• 杆组具有运动确定性和静力确定性 • 运动确定性:某一外副的运动已知,则杆组中每一构件的
运动均确定 • 静力确定性:若外力已知,则运动副反力可以求出 • 同一机构,原动件不同,则机构的级不一样。 • 运动分析,Ⅱ级组最容易,Ⅳ级组则困难的多。
状不重合。 • 低副——运动副元素几何形状重合。 • 运动链、闭式运动链、开式运动链。 • 闭式运动链成为机构——机架。
第一章 机构结构理论
1.1 基础概念
移 动 副
转 动 副
低副(low pair)
凸轮副
齿轮副
高副(high pair)
第一章 机构结构理论
1.1 基础概念
根据构件间的相对运动分:
y
p
l
l
dp
arccos(l12 d 2 l22 )
pφ
2l1d
d ( p 2x p1x )2 ( p2 y p1y )2
x
(内副)的位置为: p3x p1x l1 cos1 p3y p1y l1 sin1
构件2的角位移
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5) Ⅴ类副:自由度f=5的运动副
Ⅴ类副中,提供1个约束,即C=1。 球平面(SE, sphere even pair)为其代表,
根据Ⅴ类副的自由度特点,通常为空间点接触 高副。
y
x z
二、运动链
若干构件通过运动副的连接而组成的可动构 件系统,称之为运动链。 按构件系统是否封闭,分为闭链系统和开链。 (1)闭链:构成封闭环式的运动链,称为闭链 闭链中,每个构件上至少有2个运动副元素。 闭链中有单环闭链和多环闭链,
pl 机构中低副的数目
ph 机构中高副的数目
空间机构自由度的计算有两种计算方法
根据运动副提供的自由度计算机构自由度
根据运动副提供的约束计算机构自由度 两种计算方法基本相同,但其含义有别。 各有优缺点。 以下分别说明:
1.空间闭链机构的自由度
在空间闭链机构中,每个可动构件在三维 空 间 有 6 个 自 由 度 , 绕 x,y,z 轴 的 转 动 和 沿 x,y,z轴的移动. 如该机构有n个可动构件,则自由度总数为
第三章 机构的结构理论
本章介绍机构的组成理论,空间开链与 空间闭链机构的自由度计算方法,平面机构的 结构分析与运用图论原理讨论平面运动链的结 构综合,介绍空间运动链的型综合。其目的是 为机构类型的创新设计提供理论基础。
§3-1 机构的组成理论
1.运动副 (1)运动副的自由度 运动副所能提供的最小约束为Cmin=1,最大 约束为Cmax=5。而运动副的自由度数为6减去运 动副的约束数。 f=6-C f:运动副的自由度,c:运动副提供的约束数。
闭链示意图
单环闭链 双环闭链
空间闭链
(2)开链:用运动副连接的构件没有形成首 尾封闭的系统,称之为开链。
开链中,首尾构件上仅有一个运动副元素。
3 2
1 0
空间开链
4 2
3 1
平面开链
三、机构 把运动链中的一个构件固定,该运动链成为机构 (1)闭链机构:选择闭式运动链中的某个构件为
机架,则该运动链成为闭链机构。闭链机构 分为单环闭 开链机构:具有固定构件的开式运动链。 开链机构中,活动构件数目n 和运动副数目相等。图示所示 机械手为开链机构。
3
n=p
开链机械手机构
5=5
0
注意:机械手机构不计腕部自由度
第二次课 6学时
§3-2
平面机构自由度的计算公式
F 3n 2 pl ph
n ---活动构件的数目
6n [(6 p1 p1) (6 p2 2 p2 ) (6 p3 3 p3 ) (6 p4 4 p4 ) (6 p5 5 p5 )]
6n [6( p1 p2 p3 p4 p5 ) ( p1 2 p2 3p3 4 p4 5 p5 )]
2.运动副的分类
1)根据运动副的自由度数分类
具有1个自由度的运动副为类副 具有2个自由度运动副为类副 具有3个自由度的运动副为类副 具有4个自由度的运动副为Ⅴ类副 具有5个自由度的运动副为Ⅴ类副
2)根据运动副的约束分类
根据运动副的自由度数分类的运动副
1) Ⅰ类副:自由度f = 1的运动副 Ⅰ类副中,共提供5个约束,故C=5
5
5
6n 6 pi ipi
i 1
i 1
5
pi P 机构中各类运动副数目之和
i 1
5
5
fi ipi 各类运动副的自由度数目之和
i 1
i 1
5
F 6n 6P fi i 1
5
6n P fi i 1
p
写成通式后 F 6n P fi i 1
每个Ⅳ类运动副有4个自由度,提供2个约束,
若机构中有 P4 个Ⅳ类副,将提供 2P4个约束。
每个Ⅴ类运动副有5个自由度,提供1个约束,
若机构中有 P5 个Ⅴ类副,提供 1P5 个约束
机构自由度应为各可动构件自由度之和减 去各类运动副提供的约束总和
F 6n 5 p1 4 p2 3p3 2 p4 p5
转动副(用R表示,revolute pair) 移动副(用P表示,prismatic pair ) 螺旋副(用H表示,helical pair )
2) Ⅱ类副:自由度f=2的运动副
Ⅱ类副中,共提供4个约束,即C=4。
圆柱副 (用C表示,cylindrical pair)
球销副 (用S′表示,slotted spherical pair)
2.空间开链机构的自由度
在开链机构中,可动构件数目与运动副数目相 等。即有n = P,将其代入式上中,可推导出开
链机构的自由度计算公式。
p
F 6n P fi
p
i 1
F fi
i 1
n=P
开链机构自由度为其运动副自由度数总和
例1:计算图示开链机构自由度
C
R
R
P R
R
p
6n。
根据运动副提供的自由度计算机构自由度
每个Ⅰ类运动副有1个自由度,提供5个约束,
若机构中有 P1 个Ⅰ类副,将提供5 P1个约束。
每个Ⅱ类运动副有2个自由度,提供4个约束,
若机构中有P2个Ⅱ类副,将提供4 P2 个约束。
每个Ⅲ类运动副有3个自由度,提供3个约束,
若机构中有 P3 个Ⅲ类副,将提供3 P3 个约束。
计算公式: F f i
i 1
运动副数为P=6
R副=4,自由度数目为4
P副=1,自由度数目为1
C副=1,自由度数目为2
F=1+1+1+2+1+1=7
开链机构的自由度数目一般较多,因此其 所需的原动机数目也较多。 控制技术的发展对开链机构的应用促进明显, 开链机构缺点: 1.承载大载荷时,构件的变形较大,末端执 行部件的运动精度较低; 2.在机构的奇异位置时,出现难以控制的情 况。
圆柱副
球销副
3) Ⅲ类副:自由度f=3的运动副
Ⅲ类运动副中,提供3个约束,即C=3。 球面副(用 S 表示, spherical pair)
平面副(用 E 表示, even pair)
4) Ⅳ类副:自由度f=4的运动副
Ⅳ类副中,提供2个约束,即C=2。 球槽副(用SG表示,sphere groove pair )