2018年武汉科技大学考研真题827自动控制原理
2017年武汉科技大学考研真题827自动控制原理

第 1 页 共 4 页姓名: 报考专业: 准考证号码: 密封线内不要写题2017年全国硕士研究生招生考试初试自命题试题
科目名称:自动控制原理(√A 卷 □B 卷)科目代码:827考试时间:3小时 满分150 分可使用的常用工具:□无 √计算器 √直尺 □圆规(请在使用工具前打√)注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考完后试题随答题纸交回。
一、填空题(共5小题,每小题4分,共20分)1、线性系统正常工作的首要条件是 ,它是控制系统自身的固有特性,取决于系统本身的结构和参数,而与输入信号无关;描述控制系统输出量精度的时域指标是 ;描述控制系统单位阶跃响应过程平稳性的时域指标是 和 。
2、已知在零初始条件下,线性定常系统的单位阶跃响应为 ,t t e e t c --+-=221)(则系统单位脉冲响应为 ,该系统的传递函数()s G 为 。
3、函数的Z 变换为 。
)2(10T t -⋅δ4、某单位负反馈系统的前向通道传递函数为,其速度误差)22()12)(1()(2++++=s s s s s K s G 系数为20,则为 。
K 5、串联超前校正装置的传递函数,该装置提供的最大超前角为 。
113s ++s 二、简述题(10分)一个设计合理的系统,其开环对数频率特性的三段频具有什么特点?三、求传递函数(20分)求如题三图所示系统的传递函数)
()(s R s C 刘A学长1104405515,致力于考研真题、答案、笔记、考研信息咨询辅导。
武汉科技大学825 电子技术-2018(A卷答案)考研真题初试

科目名称:电子技术(√A卷□B卷)科目代码:825 一、单项选择题(共10小题,每小题3分,共30分) 1. D 6. B 2. C 7. C 3. B 8. D 4. A 9. D 5. A 10. C
二、填空题(共24空,每空1分,共24分) 1. (1) 共射极 电 路 (2) 共集 电 极 电 路 (3) 共集 电 极 电 路 (4) 共基极 电 路 (5) 共射极 电 路 (6) 共基极 电 路 2. (7) 电 源 变压 器 (8) 整流 电 路 (9) 滤 波 电 路 (10) 稳压电 路
1 0 =‒ 0 2×2 5
| ||
|
2 .( 16 分)解: 小信号模型如下 图 所示:
Rs
g
+
vs Rg1//Rg2
+
vi
vgs
s
+
gmvgs R rds vo
������������ = ������������ ∥ 1 ������������ = 2 1 ������������ = ������ ������������ ������������ = ������ ∥ ������������ 2Ω 0
2 6 0 ) 0= 1 0 ������ . ٠7 0 . 5 9
分 分
������������ = ������ ‒
2
0 ×1 0 0 ≈‒ 1 1 0 . 7
单端输出时,
��Байду номын сангаас���������
������= 1
������������ 2
=‒ 9 ������������ =‒
������
3
自动控制原理题目(含答案)

自动控制原理题目(含答案)自动控制原理题目(含答案)《自动控制原理》复习参考资料一、基本知识11、反馈控制又称偏差控制,其控制作用是通过输入量与反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统与程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 与外作用及初始条件无关。
7、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为G1(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
8、系统前向通道传递函数为G(s),其正反馈的传递函数为H (s),则其闭环传递函数为G(s)/(1- G(s)H(s))。
9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s)/(1+ G(s))。
10、典型二阶系统中,ξ=0.707时,称该系统处于二阶工程最佳状态,此时超调量为4.3%。
11、应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17、对于典型二阶系统,惯性时间常数T愈大则系统的快速性愈差。
18、应用频域分析法,穿越频率越大,则对应时域指标t越小,即快速性越好s19最小相位系统是指S右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、补偿校正与复合校正四种。
(NEW)武汉科技大学信息科学与工程学院《828微机原理》历年考研真题汇编
目 录第一部分 历年考研真题汇编2014年武汉科技大学信息科学与工程学院828微机原理考研真题第二部分 兄弟院校真题汇编2015年中山大学862微机原理及应用考研真题2014年中山大学861微机原理及应用考研真题2013年中山大学857微机原理及应用考研真题2012年中山大学863微机原理及应用考研真题第一部分 历年考研真题汇编2014年武汉科技大学信息科学与工程学院828微机原理考研真题科目名称:微机原理科目代码:828注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考完后试题随答题纸交回。
一、单项选择题(共15小题,每小题2分,共30分)1.最大的10位无符号二进制数转换成十进制数是( )。
A.512B.511C.1024D.10232.在中断矢量表0000H:0028H-0000H:002BH处存储的中断矢量所对应的中断类型号为( )。
A.8B.9C.10D.113.总线周期的T1状态下,数据/地址线传输的上是( )信息。
A.数据B.地址C.控制D.状态4.在下列伪指令中定义字变量的是( )。
A.DBB.DWC.DDD.DT5.DOS系统功能(INT 21H)的9号调用要求将待显示字符串的首址送入( )。
A.DS: BXB.CS: BXC.DS: DXD.CS: DX6.设SP =2FFAH,执行下列指令后,SP寄存器的值是( )。
PUSH CXPUSH DXA.2FF6HB.2FF8HC.2FFEHD.2FFBH7.对于掉电,8086/8088是通过( )来处理的。
A.软件中断B.DMA请求C.可屏蔽中断D.非屏蔽中断8.某10位的A/D转换器输入电压范围为0-5V,当输入电压为1.5伏时,其转换结果为( )。
A.204B.307C.409D.5129.一个RAM芯片,有8条数据线和14条地址线,则该芯片最多能存储ASCII码的个数是( )。
A.16384B.32768C.256D.1410.8086/8088使用标准I/O寻址方式进行外设访问的最大地址空间范围是( )。
(完整word版)自动控制原理试卷包含答案

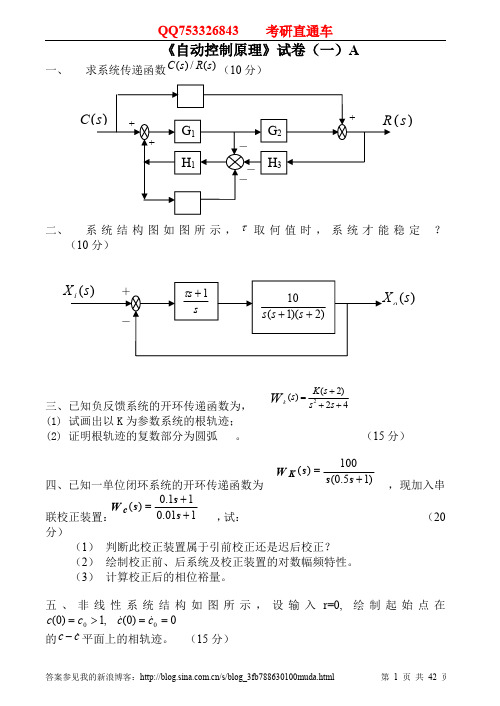
自动控制原理试卷一. 是非题(5分):(1)系统的稳态误差有系统的开环放大倍数k 和类型决定的( );(2)系统的频率特性是系统输入为正弦信号时的输出( );(3)开环传递函数为)0(2>k s k 的单位负反馈系统能跟深速度输入信号( );(4)传递函数中的是有量纲的,其单位为 ( );(5)闭环系统的极点均为稳定的实极点,则阶跃响应是无 调的( );二. 是非题(5分):(1)为了使系统的过度过程比较平稳要求系统的相角裕量大于零( );(2)Bode 图的横坐标是按角频率均匀分度的,按其对数值标产生的( );(3)对于最小相位系统,根据对数幅频特性就能画出相频特性( );(4)单位闭环负反馈系统的开环传递函数为)()()(s D s N s G =,劳斯稳定判据是根据)(s D 的系数判闭环 系统的稳定性( );奈奎斯特稳定判据是根据)(s G 的幅相频率特性曲线判闭环系统的稳定性 ( )。
三. 填空计算题(15分):(1)如图所示:RC 网络,其输出)(t u c 与输入)(t u r 的微分方程描述为 ,假定在零初始条件下,系统的传递函数)(s φ= ,该系统在)(1)(t t u r =作用时,有)(t u c = 。
(2)系统结构如图,该系统是 反馈系统,是 阶系统,是 型系统,若要使系统的放大系数为1,调节时间为0.1秒(取%σ的误差带),0k 应为 ,t k 应为 。
(3)如果单位负反馈系统的开环传递函数是))(()()(b s a s c s k s G +++=,该系统是 阶系统,是 型系统,该系统的稳态位置误差系数为 ,稳态速度误差系数为 ,稳态加速度误差系数为速度误差系数为 。
四. 是非简答题(5分):(1)已知某系统的开环传递函数在右半s 平面的极点数为,试叙述Nyquist 稳定判据的结论。
(2)试叙述系统稳定的充分必要条件。
(3)系统的稳定性不仅与系统结构有关,而且与输入信号有关,该结论是否正确。
自动控制原理试卷及答案20套
第 5 页 共 42 页
QQ753326843
3.当输入为
1 2 2
考研直通车
r (t ) 1(t ) t * 1(t ) t * 1(t ) 时,求稳态误差 e ss 。
R(s)
E (s)
1 e sT s
K s2
C (s)
0.5s
七、判断下列三个非线性系统闭环稳定性。 (15 分)
j
× -6 × -3 × 0
A.
1
B. K 162
C.
2.42
D.
0
答
( ) 7、(本小题 5 分) 下列线性系统判断中正确的是――
A.(1)稳定
B.(2)稳定
C.(3)稳定
D. 全不稳定 答
( ) 8、(本小题 5 分) 在采样控制系统中,为使采样信号不失真的恢复为原来的连续信号,则采样频率 应至少大于――
(10 分)
X i (s)
+ -
K ( s 1) 3 s as 2 2 s 1
K ( s 1) W k ( s) 2 s 2s 2
X o (s)
三、已知负反馈系统的开环传递函数为, 的根轨迹;并求系统稳定时 K 的取值范围。
试画出以 K 为参数系统 (15 分)
W K ( s)
10 c K1
-2
-3
0
c
c
-1
c
10 c K1
-2
第 3 页 共 42 页
QQ753326843
图(a) 要求: 1. 写出系统的开环传递函数。
考研直通车
图(b)
s )和恒速输入下的稳态误差。 2. 比较两系统的稳定性,暂态性能( 3. 将图(a)所示的系统校正为图(b)所示的系统,应采用什么形式的串联校正装
武汉科技大学823汽车理论2018——2020年考研真题都有答案试卷试题
2. (15 分)简述汽车加速上坡时,车轮受到的地面法向反作用力由哪几部分构成,
并比较在此工况下,前轮驱动与后轮驱动汽车的动力性的差异。
1
要点:① 地面法向反作用力有四部分:静态载荷的法向反力、动态分量、空气升力、 滚动阻力偶矩引起的法向反力;
② 动态分量、坡道引起的静态载荷的法向反力及滚动阻力偶矩引起的法向反力使后轮 受到的地面法向反作用力增大;
4. (10 分)试比较刚性车轮发生侧偏与弹性轮胎车轮发生侧偏有何不同。
要点:① 车轮侧偏指车轮平面与车轮接地中心的瞬时速度方向不重合。 ② 刚性车轮发生侧偏是因为侧向附着力不够,发生了侧向滑动; ③ 弹性轮胎车轮发生侧偏则是在侧偏力的作用下,轮胎发生了侧向弹性变形。
5. (15 分)为什么轿车悬架系统的固有频率比越野汽车悬架系统的固有频率要低?
5. (15 分)为什么轿车悬架系统的固有频率比越野汽车悬架系统的固有频率要低?
6. (15 分)画出车身单质量振动系统模型(车身质量 m2 、悬架弹簧刚度 k 、减
振器阻尼系数 c),列出系统振动方程,推导有阻尼固有频率的计算方法。
五、计算题(共 1 小题,共 15 分)
某中型货车装有前后独立的双管路制动系统,总质量 m=4080 kg,质心至前轴距离
2020 年全国硕士研究生招生考试初试自命题试题 ( B 卷)
科目代码: 823 科目名称: 汽车理论
准考证号码:
密封线内不要写题
报考专业:
注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考
完后试题随答题纸交回。
一、解释下列术语(共 5 小题,每小题 3 分,共 15 分)
1. 驱动轮附着率
第2页共2页
2018年武汉科技大学考研真题827自动控制原理
第 1 页 共 7 页 姓名
:
报
考
专
业
:
准考
证号码
:
密
封
线
内
不
要
写
题
年全国硕士研究生招生考试初试自命题试题科目名称:自动控制原理(□A 卷 √B 卷)科目代码:考试时间:3小时 满分150 分可使用的常用工具:□无 √计算器 √直尺 □圆规(请在使用工具前打√)注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考完后试题随答题纸交回。
8小题,每空4分,共40分) 典型欠阻尼二阶系统无阻尼自然振荡频率越低,过渡过程时间越阻尼比越大,超调量越 (大?小?) 、根据系统开环传递函数中包含积分环节的数目,确定系统的。
武汉科技大学自动控制原理2019年考研真题试题(含标准答案)
求如图 5 所示线性离散系统的输出 z 变换 C(z) 。
R(s)
G1 ( s)
C1 ( s) T
G2 (s)
C2 (s) T
H (s) 图5
C(s) G3 (s)
第4页共4页
!"#$ %& %'()* +,- .+/0 1 0
G2(s)
图2
四、计算题(30 分) 已知某单位负反馈系统的开环传递函数 G(s) K ,试选择参数 K 和 的值以满足
s(s 1)
如下指标:
①当输入信号为 t 时,系统的稳态误差 0.05 ; ②当输入信号为单位阶跃信号时,超调量 25% ,调节时间 0.4s ( 0.02 )。
第2页共4页
defghijkl'hmnopqorstuvwxy"CzL k@stu{w |vw]^lu}~"C 1 G"C"ijB2 /j # 1M1()78 21E9Rd 3()
1()&jj U r
要条件?
R(s)
K
C(s)
T -
s(s 1)
图3
Байду номын сангаас
10
3、(10 分)已知某控制系统开环传递函数为
,试绘出该系统的 Nyquist
s(s 1)(0.25s 1)
图(幅相频率特性曲线);并用奈氏判据判定闭环系统的稳定性。
六、计算题(25 分)
已知线性最小相位系统开环对数幅频特性如图 4 所示,
db
40dB / dec
注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考
完后试题随答题纸交回。
新版武汉科技大学机械专硕考研经验考研参考书考研真题
在我决定考研的那一刻正面临着我人生中的灰暗时期,那时发生的事对当时的我来讲是一个重大的打击,我甚至一再怀疑自己可不可以继续走下去,而就是那个时候我决定考研,让自己进入一个新的阶段,新的人生方向。
那个时刻,很大意义上是想要转移自己的注意力,不再让自己纠结于一件耗费心力和情绪的事情。
而如今,已相隔一年的时间,虽然这一年相当漫长,但在整个人生道路上不过是短短的一个线段。
就在短短的一年中我发现一切都在不知不觉中发生了变化。
曾经让自己大为恼火,让自己费尽心力和心绪的事情现如今不过是弹指的一抹灰尘。
而之所以会有这样的心境变化,我认为,是因为,在备考的这段时间内,我的全身心进入了一个全然自我,不被外界所干扰的心境,日复一日年复一年的做着同样枯燥、琐碎、乏味的事情。
这不正是一种修行吗,若说在初期,只是把自己当作机器一样用以逃避现实生活的灾难的话,但在后期就是真的在这过程中慢慢发生了变化,不知不觉中进入到了忘记自身的状态里。
所以我就终于明白,佛家坐定,参禅为什么会叫作修行了。
本来无一物,何处惹尘埃。
所以经过这一年我不仅在心智上更加成熟,而且也成功上岸。
正如我预期的那样,我开始进入一个新的阶段,有了新的人生方向。
在此,只是想要把我这一年备考过程中的积累的种种干货和经验记录下来,也希望各位看到后能够有所帮助,只不过考研毕竟是大工程,所以本篇内容会比较长,希望大家可以耐心看完,文章结尾会附上我的学习资料供大家下载。
武汉科技大学机械专硕的初试科目为:(101)思想政治理论(204)英语二(302)数学二和(818)液压传动或(819)机械原理或(827)自动控制原理参考书目为:1.《机械原理》(第三版),廖汉元、孔建益,机械工业出版社,2013 年2.《机械原理》(第七版),孙桓、陈作模、葛文杰,高等教育出版社,2010 年先说英语,最重要的就是两个环节:单词和真题。
关于单词单词一定要会,不用着急做题,先将单词掌握牢,背单词的方式有很多,我除了用乱序单词,我还偏好使用手机软件,背单词软件有很多,你们挑你们用的最喜欢的就好,我这里就不做分享了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 (s)
(5 s 2)
5、已知系统的开环传递函数为
,则系统的开环增益
(3s 1)(s 2 2s 5)
为。 2
6、系统开环对数幅频特性具有
特性时,称为对称最佳系统,而当两个转
折频率的倍数 n=4 时,常称为三阶工程最佳系统。 -2/-1/-2
7、 某线性连续系统的特征方程为 5s 4 10s 3 5s 2 3s 2 0 ,
1
R 3C 3s 3 5R 2C 2s 2 6RCs 1
三、稳定性判定及计算(30 分)
已知某负反馈系统的开环传递函数为:G(s)H(s)
K
,
s(s 3)(s 5)
(1)确定使闭环系统稳定,且全部极点的实部的绝对值都大于 1 的条件?
(2)若给定输入信号 r(t) 3t 1 时,要求系统稳态误差������������������ ≤ 0.25,确定 K 的取值
E(s)
1
s
1
E(j)
,
j 1
R(s) 1 G(s) s 11 R(j) j 11
E(j) 2 1 2 0.13
R(j)
2 112
122
E(j) arctan 1 arctan 1 45 5.19 39.810
是
。(稳定的? 不稳定的?)
不稳定的
第1页共7页
该系统
6
8、某系统的闭环传递函数为
,在单位阶跃信号作用下,其调节时间(误差带
s3
取 95%)为
,稳态输出为
。
12
二、求传递函数(20 分) C(s)
已知系统结构如图 1 所示,试求传递函数
R(s)
R(s)
1
1
R
Cs
1
1
R
Cs
1
1 C(s)
R
Cs
图1
注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;
考完后试题随答题纸交回。
一、填空题(共 8 小题,每空 4 分,共 40 分)
1、典型欠阻尼二阶系统无阻尼自然振荡频率越低,过渡过程时间越
长?),阻尼比越大,超调量越
(大?小?)
长小
(短?
2、根据系统开环传递函数中包含积分环节的数目,确定系统的
C(z) GR(z) G(z)D(z)GHR(z) 1 GH(z)D(z)
范围?
第2页共7页
解答: (1)
系统闭环传递函数 (s) G(s)
K
1 G(s) s3 8s2 15s K
则特征式 D(s) s3 8s2 +15s+K 因为极点在 s 1 之左,令 s s1 1
代入 D(s) 得 D1(s) s13 5s12 +2s1-8+K 0 劳斯阵列表为
姓 名 : 报 考 专 业 : 准 考 证 号 码 : 密封线内不要写题
2018 年全国硕士研究生招生考试初试自命题试题
科目名称:自动控制原理(□A 卷 √B 卷)科目代码:827 考试时间:3 小时 满分 150 分
可使用的常用工具:□无 √计算器 √直尺 □圆规(请在使用工具前打√)
R(j)
11
ess(t) 1 * 0.13 sin(t 300 39.810 ) 0.13 sin(t 69.810 ) 五、求采样系统的输出(10 分)
图 2 为某离散控制系统的结构图,求系统的输出C(z )
R(s)
G(s)
C(s)
解答:
D(z)
图2
C 1(s)
T1
H (s)
列劳斯表可得
18 K 系统稳定,则 5 8 0
(2)
解: D(s) s3 8s2 +15s+K
列劳斯表可得
系统稳定范围: 0 K 120
由静态误差系数法
当
r(t) 3t 1
时,令 ess
3 K/15
0.25
得
K 180 。
C(s) G(s)R(s) D(z)C 1*(s) G(s)R(s) G(s)D(z)C 1*(s)
C 1(s) H(s)C(s)
因此有:
C 1(s) H(s)C(s) H(s)G(s)R(s) H(s)G(s)D(z)C 1*(s)
C 1*1(s) H(s)G(s)R(s) * H(s)G(s)D(z) *C 1*(s)
s 11
j 11
1;
(j)
10
10 0.9
2 112
122
arctan 1 5.19 11
cw(t) 1 * 0.9 sin(t 300 5.190 ) 0.9 sin(t 24.810 )
第3页共7页
下面求稳态误差
解答:
前向通道 P1
1 R 3C 3s 3
5 个独立回路 L1
L2
L3
L4
L5
1 -
RCs
1
6 个两两互不接触回路,每个传输为
R 2C 2s 2
1 个三三互不接触回路 1 R 3C 3s 3
1
G(s)
R 3C 3s 3
1 5 6 1
RCs R 2C 2s 2 R 3C 3s 3
G(s)H(s)R(s) * G(s)H(s) * D(z)C 1*(s)
C 1*1(s)
1
G(s)H(s)R(s) * G(s)H(s) * D(z)
C(s) G(s)R(S ) G(s)D(z) G(s)H(s)R(s)* 1 G(s)H(s)* D(z)
。
型别(或型次,型数)
3、高阶系统中离虚轴最近的闭环极点,其实部小于其他闭环极点的实部的
,
并且附近不存在闭环零点,则该极点称为系统的主导极点。
1/5
4、 已知单位正负反馈系统的闭环传递函数是∅(s),则其开环传递函数
是
。
(s )
(s )
(s )
,或:正反馈
,负反馈
1 (s)
1 (s)
综合考虑稳定性与稳态误差要求可得: K 无取值,即不可能存在这种情况
四、计算题(20 分)
已知单位负反馈系统的开环传递函数为 G(s) 10 ,当系统的给定信号为 s 1
r1 (t) sin(t 300 ) 时,求求系统的稳态输出和稳态误差。
解答:下面求稳态输出
(s) 10 (j) 10