线性系统的输出反馈解耦控制
合集下载
异步电机反馈线性化解耦控制
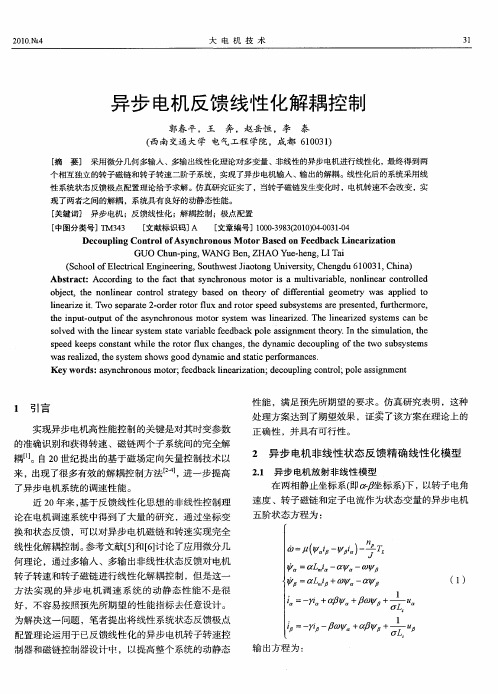
wa e l e , es se s o o dd n mi n tt ef r a c s s ai d t y tm h ws o y a ca dsai p rom n e . r z h g c
Ke r s a y c o o s o o ; e d a k l e rz t n d c u l g c n r l p l s i n e t y wo d : s h n u t r f e b c n a ia i ; e o p i o t , o e a sg n r m i o n o m n
1 引言
实现 异步 电机高 性能 控 制 的关 键 是对 其 时变参 数 的准 确识 别 和获得 转 速 、磁 链 两个 子 系统 间 的完 全解
性 能 ,满 足预 先所 期望 的要 求 。仿 真 研究 表 明 ,这种
处理方案达到了期望效果 ,证卖了该方案在理论上的
正 确 性 ,并具 有 可行性 。
l e rz . wo s p ae 2 o d rr t rf x a d r t rs e d s b y t msa e p e e t d f r h r r , i a i ei T e a t . r e o o u n o o p e u s se r s n e u t e mo e n t r l r t e i p to t u ft e a y c r n u t r s se wa i e r e . h n a ie y t m sC e h n u — u p to s n h o o s mo o y t m s l a i d T e l e rz d s s h n z i e a b n s l e t el e tm t t a ib ef e b c o e a sg me t h o . n t e smu ai n t e o v d wi t n a s e sa ev ra l e d a k p l s i n n e r I i l t , h h h i r ys t y h o s e d k e s c n t n i l h o o u h n e . h y a cd c u l g o e t o s b y tm s p e e p o sa tWh e t e r t rf x c a g s t e d n mi e o p i fm l n w u s se
线性系统解耦
(2)
0
0 gmm(s)
则称该系统是解耦的。
2021/5/4
3
串联动态补偿解耦
设耦合系统的传递函数矩阵为Gp (s), 要设计一个 传递函数矩阵为Gc (s)的串联补偿器,使得通过反馈矩
阵H 实现如图所示的闭环系统为解耦系统。
R(s)
-
2021/5/4
ε(s)
U (s)
Gc (s)
Gp (s)
线性系统的解耦
耦合:控制量与被控量之间是互相影 响、互相关联的,一个控制量的变化同 时引起几个被控制量变化的现象。
❖ 解耦:消除系统之间的相互耦合,使各 系统成为独立的互不相关的控制回路。
❖ 解耦方法:
2021/5/4
消除耦合 串联补偿解耦 状态反馈解耦
减小耦合 选择变量配对 调整控制器参数 减少控制回路
2
设系统 A, B,C 是一个 m 维输入 m 维输出的系统,
x Ax Bu
y
Cx
若其传递函数矩阵转化为对角形有理分式矩阵
(1)
g11(s) g12(s)
G(s)
g21
(s)
g22 (s)
gm1
(s)
g1m(s)
gmm (s)
g11(s) 0
0
G(s)
0
g22 (s)
0
水位表1
f1
h1
h2
f12
水位表2 泵2
f2
2021/5/4
31
偏差状态空间开环模型:
x1 x2
4
4
4 4
x1 x2
u1 u2
y1 y2
x1 x2
这里对水箱的结构进行了改造,两个水箱的水位偏 差均可测量。
现代控制理论-第6章-多变量输出反馈控制和解耦控制
(6-78) (6-79)
其闭环特征多项式H2 s可由分块矩阵的行列式恒等关系
det
A11 A21
A12 A22
detA11
det
A22 A21A111A12
(6-80)
展开为
H2 s
det sI A1* C*
B*
q
k
sIq
det
sI A1*
det sIq C*
馈矩阵,将3p q 1个 闭环极点配置在规定位置。对于n 3p的
多变量系统,利用上述方法所设计的PID控制器能任意配置全
部n q个闭环极点;对于n 3p 的多变量系统,则有n 3p 1
个极点位于未加规定的位置,与设计中所取的Q、q 有关。实际
上通常是n
3p
1个小的数目,通过重复设计
及
Q
,从而重
式(6-87),即
kWi k1
k2
2 2
2k1
2k2
0
任取 k1 1,则k2 1,故k 1 1。闭环特征多项式由式(6-
85)给出为
H3
s
s
1
s6
2 1
p2 r2
s5
6
q2 1 r2
9r2
s4
12
9 p2 1
r2
r1
9r2
s3
5 p1 9 p2 9q2 2r1 2r2 s2 31 2 p1 2 p2 q1 9q2 s
例6-3 设能控能观测、循环的多变量受控对象动态方程为
0 1 0 0 0 0 1
0
0
1
0
0
0 0
x& 0 0 0 1 0 x 0 2 u
00Βιβλιοθήκη 0010 0
设计串联解耦环节实现系统的解耦控制 (自动保存的)

馈。由于状态变量不一定具有物理意义,所以状态反馈往往不易实现。而输出变量则有明
显的物理意义,因而输出反馈易实现。
对于式(2.1)描述的线性系统,当将系统的控制量 取为输出 的线性函数
(2.4)
时,称之为输出反馈,其中其中 为 维参考输入向量, 为 矩阵,称为输出反馈增益矩阵。
将式(2.4)代入式(2.1),可得到采用输出反馈后闭环系统的状态空间方程
3.
3.
3.
对于具有相同输入、输出个数的MIMO线性定常系统
(3.8)
设 为系统的输入输出个数,可采用控制规律 ,即存在输入变换阵和状态反馈矩阵对 进行解耦的充要条件是:可解耦性判别矩阵 为非奇异。且当选取 为 时,解耦控制系统的传递函数矩阵为
(3.9)
其中 , 与 是解耦控制中两个基本特征量。对 对角线上第一个元素可提出第 个极点要求,并有
2.
设不完全能控的多输入系统为
(2.21)
经过坐标变换,即经过能控结构分解,式(2.21)可写成
(2.22)
式中, 为能控子系统,由于坐标变换不改变系统的极点,所以式(2.21)与式(2.22)系统的极点相同,它们的极点集为
(2.23)
极点 为能控极点, 为不能控极点,考虑式(2.22)系统的任意状态反馈
设计主要内容:
(1)求出系统的传递函数。
(2)设计串联解耦环节,并求出解耦后的系统传递函数。
(3)对解耦后的系统进行极点配置,并求出配置后系统的传递函数。
(4)绘制原系统及配置极点后系统的输出响应曲线图,并进行分析。
3.
3.
线性定常系统的状态空间表达式包括状态方程和输出方程,简写形式如下
(3.1)
式中, 分别为 维, 维, 维向量。式(3.1)中,上式为状态方程,下式为输出方程。状态空间表达式实际上是对MIMO系统的时域描述,而传递函数阵则是对系统的频域描述,把时域的数学模型转换成频域的数学模型,其基本方法是在零初始条件下取拉氏变换。因此,对式(3.1)在零初始条件下取拉氏变换,则有
显的物理意义,因而输出反馈易实现。
对于式(2.1)描述的线性系统,当将系统的控制量 取为输出 的线性函数
(2.4)
时,称之为输出反馈,其中其中 为 维参考输入向量, 为 矩阵,称为输出反馈增益矩阵。
将式(2.4)代入式(2.1),可得到采用输出反馈后闭环系统的状态空间方程
3.
3.
3.
对于具有相同输入、输出个数的MIMO线性定常系统
(3.8)
设 为系统的输入输出个数,可采用控制规律 ,即存在输入变换阵和状态反馈矩阵对 进行解耦的充要条件是:可解耦性判别矩阵 为非奇异。且当选取 为 时,解耦控制系统的传递函数矩阵为
(3.9)
其中 , 与 是解耦控制中两个基本特征量。对 对角线上第一个元素可提出第 个极点要求,并有
2.
设不完全能控的多输入系统为
(2.21)
经过坐标变换,即经过能控结构分解,式(2.21)可写成
(2.22)
式中, 为能控子系统,由于坐标变换不改变系统的极点,所以式(2.21)与式(2.22)系统的极点相同,它们的极点集为
(2.23)
极点 为能控极点, 为不能控极点,考虑式(2.22)系统的任意状态反馈
设计主要内容:
(1)求出系统的传递函数。
(2)设计串联解耦环节,并求出解耦后的系统传递函数。
(3)对解耦后的系统进行极点配置,并求出配置后系统的传递函数。
(4)绘制原系统及配置极点后系统的输出响应曲线图,并进行分析。
3.
3.
线性定常系统的状态空间表达式包括状态方程和输出方程,简写形式如下
(3.1)
式中, 分别为 维, 维, 维向量。式(3.1)中,上式为状态方程,下式为输出方程。状态空间表达式实际上是对MIMO系统的时域描述,而传递函数阵则是对系统的频域描述,把时域的数学模型转换成频域的数学模型,其基本方法是在零初始条件下取拉氏变换。因此,对式(3.1)在零初始条件下取拉氏变换,则有
6第六章 线性反馈系统的状态空间
[
[
]
]
]
k1 K = M k p
( A − BK )bi = Abi − b1 b2
令 c1i = k1bi , L c pi = k p bi
[
k1bi L bp M k p bi
]
( A − BK )bi = Abi − (c1i b1 + c2i b2 + L c pi b p )
第六章
线性反馈系统的状态空间综合
状态反馈 通过状态反馈进行极点配置和镇定 基于状态反馈的解耦控制 通过状态反馈进行跟踪控制设计 状态观测器
1
6.1 常用的反馈结构及其对系统特性的影响
1、常用的反馈结构 1)输出反馈 当系统为n阶状态,p个输入,q个输出时 u(t ) = r (t ) − H y(t )
& (t ) = ( A − BK ) x(t ) + Br (t ) x & (t ) = ( A − Bρk ) x(t ) + Br (t ) = ( A − bk ) x(t ) + Br (t ) x
其中 b = Bρ , b − n × 1 表明将多输入极点配置问题(A,B,K)转化成了单输入极点 配置问题(A,b,k)。 第三步:对单输入问题(A,b,k)证明若(A,b)能控,则 一定可以任意配置极点。
10
线性定常系统可用状态反馈任意配置极点的充要条件是系统完 全能控。 证明:必要性,即系统可任意配置极点,那么系统一定能控。 用反证法,当系统可任意配置极点,但系统不能控。 那么可以进行能控性分解 & (t ) = Ax (t ) + Bu (t ) x
y (t ) = Cx (t )
现代控制理论6.4 解耦控制

� 用[I+Gp(s)Gc(s)]左乘上式,有 [I+Gp(s)Gc(s)]W(s)=Gp(s)Gc(s) 即
Gp(s)Gc(s)[I-W(s)]=W(s)
补偿器解耦(3/7)
−1 ( s) , [I-W(s)]-1左乘与右乘上式,有 � 分别用 Gp 1 Gc ( s) = G − p ( s )W ( s ) [ I − W (s ) ] −1
状态反馈解耦(14/16)
� 由于E是非奇异阵,所以系统可以解耦。 � 因此,状态反馈解耦矩阵为 ⎡0 0 −1⎤ K = −E F = ⎢ ⎥ 1 2 3 ⎣ ⎦ ⎡ 1 0⎤ −1 H =E =⎢ ⎥ 0 1 ⎣ ⎦
−1
状态反馈解耦(15/16)
� 此时闭环系统状态方程和输出方程为: ⎡0 ̇ (t ) = ⎢0 x ⎢ ⎢ ⎣0 ⎡1 y (t ) = ⎢ ⎣0 0 −1⎤ ⎡1 0 ⎤ ⎢ 0 0 ⎥ v (t ) 0 1⎥ x ( t ) + ⎥ ⎢ ⎥ ⎢ 0 0⎥ ⎦ ⎣0 1 ⎥ ⎦ 1 0⎤ x (t ) ⎥ 0 1⎦
� 根据补偿器Gc(s)的求解公式,有
1 Gc ( s) = G − p ( s )W ( s ) [ I − W ( s ) ] −1 −1
⎡ 1 ⎤⎡ 1 ⎤⎡ s ⎤ 0 0 0 ⎢ 2s + 1 ⎥ ⎢ s +1 ⎥ ⎢ s +1 ⎥ =⎢ ⎥⎢ ⎥⎢ ⎥ 1 ⎥⎢ 1 ⎥⎢ 5s ⎥ ⎢ 1 0 0 ⎢ ⎥ ⎢ ⎥ ⎢ ⎣ s + 1⎦ ⎣ 5s + 1⎦ ⎣ 5s + 1⎥ ⎦ 2s + 1 ⎡ ⎤ 0 ⎥ ⎢ s =⎢ ⎥ ⎢ −( s + 1)(2 s + 1) s +1 ⎥ ⎢ s 5s ⎥ ⎣ ⎦
Gp(s)Gc(s)[I-W(s)]=W(s)
补偿器解耦(3/7)
−1 ( s) , [I-W(s)]-1左乘与右乘上式,有 � 分别用 Gp 1 Gc ( s) = G − p ( s )W ( s ) [ I − W (s ) ] −1
状态反馈解耦(14/16)
� 由于E是非奇异阵,所以系统可以解耦。 � 因此,状态反馈解耦矩阵为 ⎡0 0 −1⎤ K = −E F = ⎢ ⎥ 1 2 3 ⎣ ⎦ ⎡ 1 0⎤ −1 H =E =⎢ ⎥ 0 1 ⎣ ⎦
−1
状态反馈解耦(15/16)
� 此时闭环系统状态方程和输出方程为: ⎡0 ̇ (t ) = ⎢0 x ⎢ ⎢ ⎣0 ⎡1 y (t ) = ⎢ ⎣0 0 −1⎤ ⎡1 0 ⎤ ⎢ 0 0 ⎥ v (t ) 0 1⎥ x ( t ) + ⎥ ⎢ ⎥ ⎢ 0 0⎥ ⎦ ⎣0 1 ⎥ ⎦ 1 0⎤ x (t ) ⎥ 0 1⎦
� 根据补偿器Gc(s)的求解公式,有
1 Gc ( s) = G − p ( s )W ( s ) [ I − W ( s ) ] −1 −1
⎡ 1 ⎤⎡ 1 ⎤⎡ s ⎤ 0 0 0 ⎢ 2s + 1 ⎥ ⎢ s +1 ⎥ ⎢ s +1 ⎥ =⎢ ⎥⎢ ⎥⎢ ⎥ 1 ⎥⎢ 1 ⎥⎢ 5s ⎥ ⎢ 1 0 0 ⎢ ⎥ ⎢ ⎥ ⎢ ⎣ s + 1⎦ ⎣ 5s + 1⎦ ⎣ 5s + 1⎥ ⎦ 2s + 1 ⎡ ⎤ 0 ⎥ ⎢ s =⎢ ⎥ ⎢ −( s + 1)(2 s + 1) s +1 ⎥ ⎢ s 5s ⎥ ⎣ ⎦
[课件]线性系统解耦PPT
![[课件]线性系统解耦PPT](https://img.taocdn.com/s3/m/113d1ee70c22590102029d67.png)
R (s)
-
ε(s)
G c(s)
U (s)
G p (s)
Y (s)
H
2018/12/19 4
由上图可以求得解耦系统的闭环传递函数矩阵为
Φ ( s ) I G ( s ) H ( s ) G
1
(3 )
其中 G ( s )
前向通道传递函数矩阵
G () s G () sG () s p c
+
+
r2
2018/12/19
-
G c22 ( s )
2
u
G p22 ( s )
2
y
2
8
g (s )g (s ) c 1 1 p 1 1 1 g (s )g (s ) c 1 1 p 1 1
(s ) 1 1
g s )g s ) c 2 2( p 2 2( 1 g s )g s ) c 2 2( p 2 2(
0 g11(s) 0 0 g (s) 22 (2) G(s) 0 0 0 g ( s ) m m
2018/12/19
则称该系统是解耦的。
3
串联动态补偿解耦
设耦合系统的传递函数矩阵为 G p ( s ) , 要设计一个
传递函数矩阵为G c ( s ) 的串联补偿器, 使得通过反馈矩 阵 H 实现如图所示的闭环系统为解耦系统。
s ) 2 2(
g ( s ) g ( ss ) ( ) g ( s ) g ( ss ) ( ) 0
c 2 2 p 1 2 2 c 1 2 p 1 1 2
g ( s ) g ( ss ) ( ) g ( s ) g ( ss ) ( ) 0 c 1 1 p 2 1 1 c 2 1 p 2 2 1
线性系统课件解耦控制问题讲解精品文档

5.5 解耦控制问题
一 .动态解耦问题
对象:p个输入,p个输出
x Ax Bu y Cx G (s) C (sI A)1 B
若系统的初始状态为0,则
y1(s)g11(s)u1(s)g12(s)u2(s)g1p(s)up(s) y2(s)g21(s)u1(s)g22(s)u2(s)g2p(s)up(s) yp(s)gp1(s)u1(s)gp2(s)u2(s)gpp(s)up(s)
w
Bw
Dw
xc
r-xc 来自cxc BceKc{A,B,C,D}
-
y
伺服补偿器
K
镇定补偿器
• 对象
x Ax Bu B w w
y Cx Du D w w { A, B, C}能控 , 能观
•
干扰信号
xw Awxw, xw(0)未知
w(t) Cwxw
• 参考信号 xr Arxr, xr(0)未知 r(t) Crxr
1 (s)
使闭环系统稳定的部分 N c (s) D c (s)
在回路中引入(复制)参考信号和扰动信号的模型
1
(s)
这种方法常称为内模原理.
1 (s)
称为内模.
对象 G(s) N(s)
D(s)
的参数变化称为参数摄动.
• 在以上方法中,对象和补偿器的参数变化即使很大,但只
要 D c (s) D (s) (s) N c (s) N (s) 0
令
r(s),w(s)
(s) 是
分别是 Ar , Aw 的最小多项式
r(s),w(s) 位于右半闭S平面上的根
因式的最小公倍式.
一 .动态解耦问题
对象:p个输入,p个输出
x Ax Bu y Cx G (s) C (sI A)1 B
若系统的初始状态为0,则
y1(s)g11(s)u1(s)g12(s)u2(s)g1p(s)up(s) y2(s)g21(s)u1(s)g22(s)u2(s)g2p(s)up(s) yp(s)gp1(s)u1(s)gp2(s)u2(s)gpp(s)up(s)
w
Bw
Dw
xc
r-xc 来自cxc BceKc{A,B,C,D}
-
y
伺服补偿器
K
镇定补偿器
• 对象
x Ax Bu B w w
y Cx Du D w w { A, B, C}能控 , 能观
•
干扰信号
xw Awxw, xw(0)未知
w(t) Cwxw
• 参考信号 xr Arxr, xr(0)未知 r(t) Crxr
1 (s)
使闭环系统稳定的部分 N c (s) D c (s)
在回路中引入(复制)参考信号和扰动信号的模型
1
(s)
这种方法常称为内模原理.
1 (s)
称为内模.
对象 G(s) N(s)
D(s)
的参数变化称为参数摄动.
• 在以上方法中,对象和补偿器的参数变化即使很大,但只
要 D c (s) D (s) (s) N c (s) N (s) 0
令
r(s),w(s)
(s) 是
分别是 Ar , Aw 的最小多项式
r(s),w(s) 位于右半闭S平面上的根
因式的最小公倍式.