模拟电磁曲射炮设计
基于STM32的模拟电磁曲射炮
最终可得抛物体的轨迹方程为
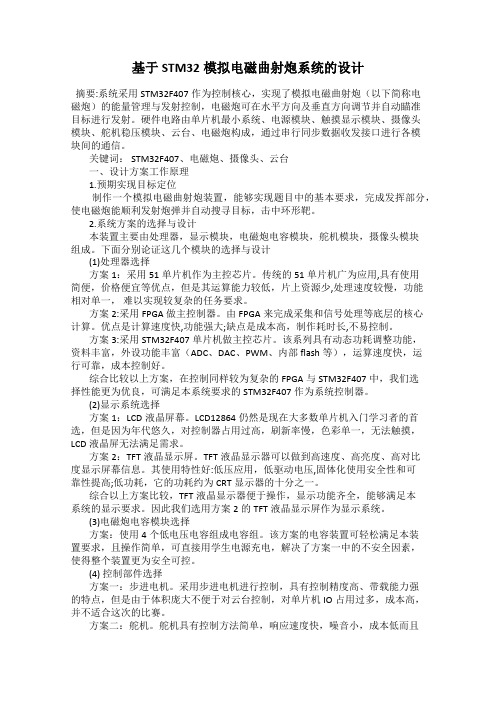
5、电磁炮电路设计 由直流电源为电磁炮供能,升压模块将电源较低的电压转变 为高电压并给储能电容充电,储能电容用来储存电能和向线圈释放 电能,控制开关用来控制充电和放电(放电即为开启发射装置)。 其中组成元件有 12V 直流电源、整流二极管、阻尼二极管、电解电容、 电感线圈以及电阻。电容作为储能器件 , 具有容量大、内部电感极小、 耐压高的特性 , 储能达数千焦耳至数兆焦耳。开关采用继电器,能 极好的保证电路的安全性,当电路发生故障时能及时切断电路。阻 尼二极管的作用是防止反向电压对电容反向充电 , 避免损坏电容 器。 6、控制理论分析 利用舵机搭建云台,控制方向和角度。舵机是控制电路接收信 号源的控制脉冲,进而驱动电机转动;齿轮组将电机的速度成大倍 数缩小,并将电机的输出扭矩放大相应倍数,然后输出;电位器和 齿轮组的末级一起转动,测量舵机转动角度;单片机检测并根据电 位器转动角度,然后控制舵机转动到目标角度或保持目标角度。 7、STM32F103R 单片机程序编写 由于炮管的角度调整是依据舵机进行调整,而舵机的控制是 靠 PWM 的输出,所以代码的开始要先进行 PWM 的初始化以及 其它模块(OLED 显示屏等)的初始化。代码的整体结构是在一个 while 循环里面进行 switch 的选择判断执行。首先刚进入 while 时先对所选引脚 PG(11) 进行高电平的输出(因为电磁炮的最终发 射是继电器在控制,而继电器的相关引脚就是 PG(11)),然后执行 按键读取函数读取按键的第一个键入数值从而区分电磁炮的不 同发射情况,switch 判断后在进入所选择的情况后就去执行该情 况下所对应的代码 --- 执行按键读取函数等待键入参数,键入 参数完毕后一键发炮,而发炮键在代码中即将继电器的对应引脚 PG(11) 代码改为输出低电平,通过延时低电平持续时间控制大电 容充电时间从而控制开炮。 8、实物图
基于STM32的模拟电磁曲射炮实验系统设计

ISSN1006-7167CN31-1707/TRESEARCHANDEXPLORATIONINLABORATORY第39卷第10期 Vol.39No.102020年10月Oct.2020 基于STM32的模拟电磁曲射炮实验系统设计张清勇, 吕笑天, 李志勇, 李嘉豪(武汉理工大学自动化学院,武汉430070)摘 要:在实验教学中,为帮助学生更好地掌握电磁场和计算机视觉领域相关知识,设计了一种基于STM32的模拟电磁曲射炮实验系统。
该系统机械结构包括2自由度可控云台和电磁炮结构。
硬件部分由主控、识别、运动控制、电磁炮控制以及人机交互等模块组成,系统采用STM32VGT6作为主控制器。
软件部分通过使用颜色追踪算法结合PID算法实现电磁炮自动追随引导标识并集中环形靶心。
测试结果表明,模拟电磁曲射炮系统可以完成色块追随,使炮口精准对准引导标识。
也可通过手动输入距离和角度,完成对环形靶的精准打击。
该系统易于实现,且具有定位打击精度高、追踪色块打击速度快的优点。
关键词:电磁曲射炮;机器视觉;PID算法;颜色追踪算法中图分类号:TP39 文献标志码:A 文章编号:1006-7167(2020)10-0077-06SimulationDesignofElectromagneticCurvedGunExperimentSystemBasedonMachineVisionZHANGQingyong, L Xiaotian, LIZhiyong, LIJiahao(SchoolofAutomation,WuhanUniversityofTechnology,Wuhan430070,China)Abstract:Intheexperimentalteaching,inordertohelpstudentsbettergrasptheelectromagneticfieldandcomputervisionrelatedknowledge,amachinevisionbasedSTM32curvedgunexperimentalsystemwasdesigned.Themechanicalstructureofthesystemincludestwodegreesoffreedomcontrollablecradleheadandelectromagneticgun.Thehardwarepartconsistsofthemaincontrolmodule,identificationmodule,motioncontrolmodule,electromagneticguncontrolmoduleandman machineinteractionmodule.ThemaincontrolmoduleUSESusesSTM32VGT6asthemaincontroller.Inthesoftwarepart,thecolorblocktrackingalgorithmandcascadePIDalgorithmareusedtorealizetheelectromagneticguntoautomaticallyfollowtheguidancemarkandconcentratetheannulartargetcenter.Thetestresultsshowthatthesimulatedelectromagneticcurvedgunsystemcanfollowthecolorblocks,sothatthegunmuzzlecanpreciselyalignwiththeguidancemark.Youcanalsomanuallyinputtheangulardistancetoachieveaprecisestrikeonthetarget.Thesystemiseasytoimplement,andhastheadvantagesofhighprecisionofpositioningandfastspeedoftrackingcolorblock.Keywords:electromagneticcurvedgun;machinevision;PIDalgorithm;colorblocktrackingalgorithm收稿日期:2020 01 02基金项目:湖北省自然科学基金项目(2019CFB571);武汉理工大学教学改革研究项目重点项目(2019024);国家级大学生创新创业训练计划(20191049711003)作者简介:张清勇(1984-),女,湖北仙桃人,博士,高级实验师,研究方向为智能交通系统优化与控制。
模拟电磁曲射炮的设计与反思——以2019年全国大学生电子设计竞赛h题为例

37
信息:理论与观点 信息记录材料 2019年10月 第20卷第10期
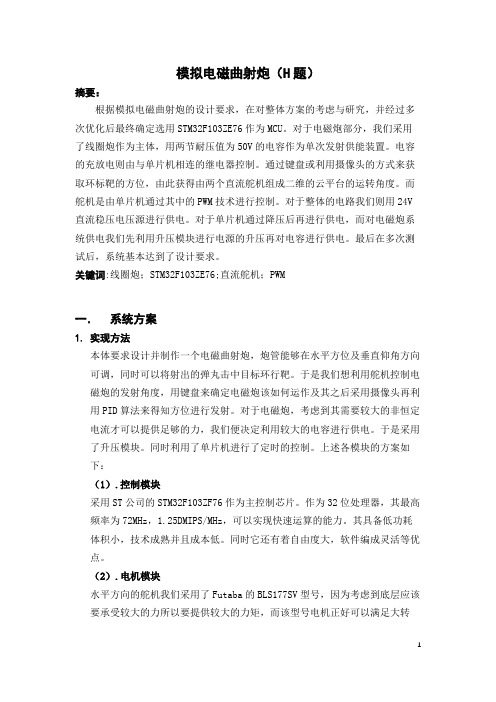
我们原计划按照以下电路图搭建了我们的电磁炮:
率数字舵机才能够稳定旋转。好在,这并不会影响我们实 际使用,因为根据题目要求,初始时炮管需保持水平。这 仅仅是给我们测试数据带来了一点难度。最终的数据表格 和拟合结果如下:
这并不是我们的最终电路。由于我们方向普遍缺乏模 电知识,因此在实际使用中,三极管频繁炸裂,所以我们 最终选用了现成的 DC-DC 升压模块替换掉原本电路图中的 三极管和变压器线圈组成的升压电路 [3]。
H 题的任务是自行设计并制作一个模拟电磁曲射炮(以
下简称电磁炮),炮管应采用线圈炮 [1],水平方位及垂直 仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶 和引导标识(以下简称标靶),发射周期不得超过 30 秒。 电磁炮由直流稳压电源供电,电磁炮系统内允许使用容性 储能元件。基础要求是:(1)要求电磁炮能做到通过输 入设备设定目标的距离,并发射炮弹,按击中环形靶的环 数得分;(2)要求电磁炮能做到通过输入设备设定目标 的距离和水平偏转角,并发射炮弹,按击中环形靶的环数 得分。发挥部分是:(1)要求电磁炮能在规定时间内找 到偏离中心 -30°至 30°的红色标靶,测定距离并发射炮 弹,按击中环形靶的环数得分;(2)要求电磁炮能在规 定时间内找到偏离中心 -30°至 30°,距离 250c m 的红色 标靶,并在运动过程中发射炮弹,按击中环形靶的环数得 分。 4 实际系统的选择和搭建
[3] 宋昌统,王辉 . 虚拟现实技术在高职高专计算机专业中的教 学研究 [J]. 信息与电脑 ( 理论版 ),2015(24):161-162. [4] 赖蘋华 . 基于虚拟现实和项目教学的高职计算机软件专业建 设改革的探索与研究 [J]. 职教论坛,2014(36):63-66.
基于stm32的模拟电磁曲射炮设计
廊坊师范学院学报(自然科学版) Journal of Langfang Normal University (Natural Science Edition)
Mar.2020 Vol.20 No.l
基于STM32的模拟电磁曲射炮设计
郑桂林,姚楠,苏文鹏
(滁州学院,安徽滁州239000)
33电磁炮的控制算法炮弹在运动过程中会受到空气阻力阻力与速度的关系可近似如下fkv2由此可根据牛顿第二定律得水平和竖宜方向的加速度如下mavvmmrdt靳mgkvyymayym我们已知初始状态下也就是匸0时voxv0c0s0v0sind所以结合3式可得vvxxv0cos00ewm萨忖鬪筝严罕将dxvvxxdtdyvvyydt代入4式再进行积分运算得xfvocos0ljk5尸吋觸罕1严竽所以迪amp
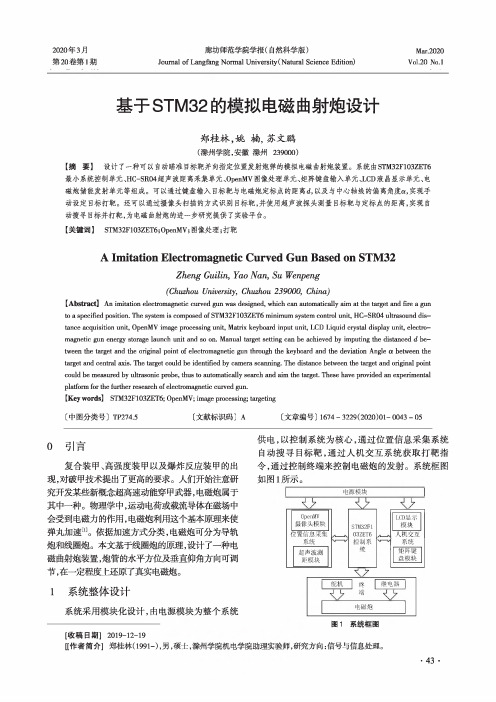
本文设计的模拟电磁曲射炮及其目标靶均垂 直放置于同一水平面上,且打靶时目标靶的中心始 终沿靶面的法线方向指向电磁炮的定标点,炮筒绕 定标点做圆周运动即可完成对靶的瞄准 。位置信 息采集系统由OpenMV摄像头模块和超声波测距模 块构成。OpenMV摄像头模块采集到位置信息后, 通过串口通信的方式传递给STM32F103ZET6最小 系统控制单元。控制单元通过对位置信息的计算、 处理,控制水平舵机偏转相应的角度 ,完成对目标 靶的水平方向瞄准。之后再通过超声波测距模块 测量目标靶与定标点的距离,该距离与OpenMV摄 像头模块获得的水平位置信息共同确定靶心的位 置。距离信息采集完毕之后,送入STM32F103ZET6 最小系统控制单元,通过公式计算,得到炮筒的仰 角,即可控制垂直舵机旋转到指定角度,从而完成 打靶过程。
摄像头模块
位置信息采集 系统
超声波测 距模块
基于STM32模拟电磁曲射炮系统的设计
基于STM32模拟电磁曲射炮系统的设计摘要:系统采用STM32F407作为控制核心,实现了模拟电磁曲射炮(以下简称电磁炮)的能量管理与发射控制,电磁炮可在水平方向及垂直方向调节并自动瞄准目标进行发射。
硬件电路由单片机最小系统、电源模块、触摸显示模块、摄像头模块、舵机稳压模块、云台、电磁炮构成,通过串行同步数据收发接口进行各模块间的通信。
关键词: STM32F407、电磁炮、摄像头、云台一、设计方案工作原理1.预期实现目标定位制作一个模拟电磁曲射炮装置,能够实现题目中的基本要求,完成发挥部分,使电磁炮能顺利发射炮弹并自动搜寻目标,击中环形靶。
2.系统方案的选择与设计本装置主要由处理器,显示模块,电磁炮电容模块,舵机模块,摄像头模块组成。
下面分别论证这几个模块的选择与设计(1)处理器选择方案1:采用51单片机作为主控芯片。
传统的51单片机广为应用,具有使用简便,价格便宜等优点,但是其运算能力较低,片上资源少,处理速度较慢,功能相对单一,难以实现较复杂的任务要求。
方案2:采用FPGA做主控制器。
由FPGA来完成采集和信号处理等底层的核心计算。
优点是计算速度快,功能强大;缺点是成本高,制作耗时长,不易控制。
方案3:采用STM32F407单片机做主控芯片。
该系列具有动态功耗调整功能,资料丰富,外设功能丰富(ADC、DAC、PWM、内部flash等),运算速度快,运行可靠,成本控制好。
综合比较以上方案,在控制同样较为复杂的FPGA与STM32F407中,我们选择性能更为优良,可满足本系统要求的STM32F407作为系统控制器。
(2)显示系统选择方案1:LCD液晶屏幕。
LCD12864仍然是现在大多数单片机入门学习者的首选,但是因为年代悠久,对控制器占用过高,刷新率慢,色彩单一,无法触摸,LCD液晶屏无法满足需求。
方案2:TFT液晶显示屏。
TFT液晶显示器可以做到高速度、高亮度、高对比度显示屏幕信息。
其使用特性好:低压应用,低驱动电压,固体化使用安全性和可靠性提高;低功耗,它的功耗约为CRT显示器的十分之一。
2019全国电赛H题省二论文模拟电磁曲射炮
模拟电磁曲射炮(H题)摘要:根据模拟电磁曲射炮的设计要求,在对整体方案的考虑与研究,并经过多次优化后最终确定选用STM32F103ZE76作为MCU。
对于电磁炮部分,我们采用了线圈炮作为主体,用两节耐压值为50V的电容作为单次发射供能装置。
电容的充放电则由与单片机相连的继电器控制。
通过键盘或利用摄像头的方式来获取环标靶的方位,由此获得由两个直流舵机组成二维的云平台的运转角度。
而舵机是由单片机通过其中的PWM技术进行控制。
对于整体的电路我们则用24V 直流稳压电压源进行供电。
对于单片机通过降压后再进行供电,而对电磁炮系统供电我们先利用升压模块进行电源的升压再对电容进行供电。
最后在多次测试后,系统基本达到了设计要求。
关键词:线圈炮;STM32F103ZE76;直流舵机;PWM一.系统方案1.实现方法本体要求设计并制作一个电磁曲射炮,炮管能够在水平方位及垂直仰角方向可调,同时可以将射出的弹丸击中目标环行靶。
于是我们想利用舵机控制电磁炮的发射角度,用键盘来确定电磁炮该如何运作及其之后采用摄像头再利用PID算法来得知方位进行发射。
对于电磁炮,考虑到其需要较大的非恒定电流才可以提供足够的力,我们便决定利用较大的电容进行供电。
于是采用了升压模块。
同时利用了单片机进行了定时的控制。
上述各模块的方案如下:(1).控制模块采用ST公司的STM32F103ZF76作为主控制芯片。
作为32位处理器,其最高频率为72MHz,1.25DMIPS/MHz,可以实现快速运算的能力。
其具备低功耗体积小,技术成熟并且成本低。
同时它还有着自由度大,软件编成灵活等优点。
(2).电机模块水平方向的舵机我们采用了Futaba的BLS177SV型号,因为考虑到底层应该要承受较大的力所以要提供较大的力矩,而该型号电机正好可以满足大转矩。
在水平方向的捕捉速度一般较快,且要有较快的反应速度,其次水平方向会有较大的角度转变,因此要有尽可能小的死区,所以我们选用了这款高价位的电机,其可以满足整体要求。
嵌入式模拟电磁曲射炮系统设计
关键词:嵌入式;STM32;大数据技术;电磁曲射炮电磁曲射炮顾名思义是用电磁力发射弹丸并力求准确命中目标[1],而能够通过电磁力发射的弹丸一般使用铁珠或者钢珠[2,3]。
为了更好地研究电磁曲射炮,结合电磁学、力学等理论,本文模拟设计一种基于嵌入式与大数据技术的模拟电磁曲射炮系统。
结合嵌入式技术目的是为了设计的电路系统体积小,运算速度快,稳定性强,低功耗,而且功能强大[4];结合大数据技术目的是为了建立控制专家库数据[5],记录每一次发射前后的所有电路参数和发射效果,通过算法模型不断优化自动控制参数,以提高电磁曲射炮控制效果。
文章采用内核是ARM32位Cortex-M3CPU的STM32单片机,并采用DC-DC升压恒压恒流可调电路和ADXL345倾斜度角度传感器,程序设计时在每次发射任务初始化时通过无线网络连接云端服务器获取控制专家库数据进行对比和参考,且在发射完成后注意更新控制专家库数据。
相比市面已有的模拟电磁曲射炮,本次设计的控制系统精度更高、稳定性更强,可以在实际应用中进行推广。
1电路模块的设计1.1电路硬件系统总体设计本系统由嵌入式单片机主控芯片电路、按键电路、角度传感器、继电器模块、舵机云台控制电路、AD采集电路、图像处理电路、显示电路、语音播报电路及无线网络收发电路十个电路模块组成。
首先主控芯片采集舵机控制电路中的角度传感器和图像处理电路中的信息数据,同时通过无线网络收发电路接收云端服务器控制专家库数据进行参考,再由主控芯片发送指令到舵机控制电路,从而自动搜寻目标,再由继电器电路控制大功率电容的充放电,从而来实现电磁曲射炮的发射。
电路硬件系统总体框图如图1所示。
1.2嵌入式单片机主控芯片电路嵌入式单片机主控芯片电路包括单片机最小系统、复位按键和OLED液晶显示,主控芯片采用STM32系列的ARM32位Cortex-M3CPU。
若复位按键按下,则单片机的所有数据恢复到最初始的状态,PA、PB、PC、PD口则用于传输显示数据,OLED则是实时显示系统工作时的电压值、仰角角度。
基于 STM32 与 OpenMV 的双主控模拟电磁曲射炮系统
基于 STM32 与 OpenMV 的双主控模拟电磁曲射炮系统摘要:本系统采用STM32F103 为控制核心,采用 OpenMV 为辅助主控,两主控间采用串口进行通信,设计出一个电磁曲射炮系统。
系统由主控部分、电容充放电部分以及电磁炮炮体等部件构成。
通过电磁系统中电磁场产生的磁场力来对金属炮弹进行加速,使其能击中目标。
关键词:STM32F103;OpenMV;磁场力;1 系统方案本系统的设计思路如图 1,直流稳压源通过全桥电路得到交流电压,加在变压器一次侧,通过改变开关的占空比来改变输出电压 U,再通过四倍压整流,将较低的交流电压整流得到一个较高的直流电压,进而为电容充电,再利用电容对线圈放电,通过电磁系统中电磁场产生的磁场力来对金属炮弹进行加速。
图 1 方案框图1.1 电路方案方案一:反激电路指当开关管接通时,输出变压器充当电感,电能转化为磁能,此时输出回路无电流;相反,当开关管关断时,输出变压器释放能量,磁能转化为电能,输出回路中有电流。
但当电路工作在断续模式时,在负载为零的极限情况下,将损坏电路中的元件。
方案二:全桥电路+四倍压整流,其中的逆变电路由四个开关组成(这里可以采用单相逆变电路),互为对脚的两个开关同时导通,而同一侧半桥上下两开关交替导通,将直流电压逆变的交流电压加在变压器一次侧,再通过四倍压整流得到一个较高的直流电压。
通过对以上两种方案的比较可知,方案二具有全波整流电路的优点,且同时在一定程度上克服了它的缺点。
所以选择方案二。
2 理论分析与计算2.1 炮弹路线规划计算2.2 炮弹发射所需能量计算四倍压整流后的输出电压:24V电压输入,经单相逆变+变压器+四倍压整流电路后输出约 200V 电压。
电容器电势能:,根据我们所采用的电容计算可得,电容器所存储的能量约为 20J 左右。
3 电路与程序设计3.1 硬件电路设计输入直流稳压电源,通过驱动电路驱动单相桥式逆变电路后接变压器,通过四倍压整流电路,即可得到数倍于输入电压的直流电压。
模拟电磁曲射炮
18 | 电子制作 2020年09月系统整体框图如图1所示。
其设计的基本思想为:采用STM32F103RBT6单片机作为系统的核心控制器,并通过单片机输出两路(周期20ms)PWM 信号实现舵机在水平和垂直方向上转动角度的控制。
对于指定距离和角度的发射目标,本系统采用人机交互系统,利用矩阵键盘输入电磁炮的中心轴偏离角度α和目标距离d,在基础上通过单片机编程计算出电磁炮的仰角并输出高电平触发电子开关发射炮弹,击中目标。
对于具有引导标识的靶标,首先采用单片机控制舵机,实现电磁炮水平方向的旋转,并带动OpenMV 摄像头完成引导标识的扫描,确定导引标识的角度;然后利用VL53L1X 测距模块测量电磁炮与导引标识的距离,并将该距离反馈给单片机用于计算垂直舵机的仰角;最后单片机输出高电平触发电子开关发射炮弹。
2 系统理论分析与计算■2.1 电磁炮弹道分析0 020cos 1sin 2S V t H V t gt θθ=⋅−=⋅−(1)推出电磁炮与环形靶中心位置的距离S 的表达式为: 20sin 2cos 2V S g θ =+(2)■2.2 能量计算根据炮弹初始动能表达式:()2/2E mV =,选取炮弹质量m=5g,只需计算出炮弹的速度,即可推出炮弹的初始动能。
而该动能即为电容经线圈放电损耗之后,炮弹飞至最远距离所需的能量。
炮弹速度计算如下:发射角θ=45°,云台和底座的高度H=16cm,根据模拟要求,设定S=3m,将以上条件带入公式(2)推得炮弹的最低初速度V=5.3m/s。
由此计算出炮弹的初始动能为0.07J。
若考虑空气阻力等其他因素www�ele169�com | 19电子电路设计与方案的影响,并要求线圈转化效率尽可能高,则选取提供能量的电容的容值为C=1000uF,耐压值为100V。
电容满电时所具有的能量为5J。
故理论上算得线圈最低能量转化效率为:/1E Q η==1.4%Q 。
而实际方案中,当电容充电值约为50V 时()21/2 1.25J Q CU ==′。
基于STM32的模拟电磁曲射炮设计
关键词:电磁炮;单片机;磁场;电容
中图分类号:TN98
文献标识码:A
DOI:10.14022/j.issn1674-6236.2020.17.040
文章编号:1674-6236(2020)17-0185-04
摘要:本设计实现了手动设置发射和自动搜寻目标发射两种射击模式自由转换的模拟电磁曲射
炮。本设计采用单片机 STM32F407 作为主控制系统,整体系统由主控制模块、按键模块、电磁炮发
射模块、电容充放电模块、电磁炮电源模块、控制系统电源模块等组成。本设计实现了电磁炮成功
发射;可按键输入预设距离值和预设角度值,实际测得电磁炮发射至目标位置的误差≤ 20 cm,测试
key module,an electromagnetic artillery launch module,a capacitor charging and discharging module,
an electromagnetic artillery power module,and a control system power module and so on. This design has
the following functions.The first,the design achieves the successful launch of the electromagnetic
artillery;The second,the preset distance value and the preset angle value can be entered by pressing
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模拟电磁曲射炮设计
张泽旭
邵化壮
刘
鹏
徐辑林
胡志成
(山东农业大学机械与电子工程学院,山东泰安271018)
摘
要:模拟电磁曲射炮在军事、工业等方面都有实际应用意义。
现设计了模拟电磁曲射炮系统,该设计以STM32单片机作为主控
芯片,通过OpenMV3采集数据给单片机进行数据处理,通过舵机对云台进行角度和方向调整,还可以手动通过按键输入距离和角度对云台进行调整,瞄准标识物体,通过继电器控制电磁炮的充电和放电,通过程序对弹丸初速度和舵机角度进行调整,间接控制弹丸运动,最终实现对目标靶的精准射击。
关键词:STM32单片机;数据处理;云台;继电器
1系统方案设计
本设计主要采用STM32单片机作为主控芯片,用OpenMV3
采集数据,用双舵机云台控制炮台角度和摄像头方向,通过OLED 显示模块作为整个系统的交互界面,按键可以进行模式选择和距离角度的输入,以调整云台角度,电源模块、电磁炮、继电器控制电磁炮的充电和发射。
下面将其中主要模块的选择与设计方案进行详细介绍。
系统整体框架如图1所示。
1.1控制方案选择
方案一:采用STM32单片机。
STM32系列单片机拥有高性
能、低成本、低功耗嵌入式应用设计的ARM Cortex -M3内核,程序库比较齐全,并且程序为模块化,接口相对简单,应用较为广泛。
但也存在一定不足,如针对多路信号处理需要多片DSP 并行处理。
方案二:采用MSP430F5529作为主控芯片。
MSP430系列单片机是美国德州仪器(TI )1996年开始推向市场的一种16位超低功耗、具有精简指令集(RISC )的混合信号处理器(Mixed Signal Processor )。
MSP430单片机具有处理能力强、运行速度快、功耗低、内部资源丰富等优点。
但是I /O 口无保护,易被过压过流击穿。
在综合比较上述两种方案后,基于本系统的特点采用方案一,使用STM32单片机作为主控芯片。
1.2
测距装置的选择
方案一:采用激光测距模块ATK -VL53L0X 测量标识物体与炮台间的距离,但是激光测距模块测量范围较小,在规定射程内容易受光线强度影响,会产生较大的测量误差。
方案二:采用OpenMV3测量炮台与标识物间的距离,测量较为精准,误差较小,并且用OpenMV3还可以代替摄像头寻找目标,实现自动搜寻目标。
在OpenMV3与STM32单片机之间采用串口通信,实时回传OpenMV3所测量的数据。
考虑到整个系统的稳定性与所实现的功能等方面进行分析,本设计决定采用功能更为全面的OpenMV3作为测距装置。
1.3电源模块设计
电源模块不仅给单片机和云台供电,还要给电磁炮电容
进行充电,给电磁炮提供足够动力。
电源的选择还要首先在保证安全的前提下考虑。
经过多次实验验证,在采用双电源对电
路进行供电时,既能保证各个模块运行,还可减少各模块间的相互干扰,提高系统运行的稳定性,且可保障安全。
通过降压稳压模块分别对STM32单片机、OpenMV3和舵机进行供电,对电磁炮电容进行充电时,所需电压较高,为避免对其他模块运行造成影响,本设计采用单独电源S -15-24AC -DC 变压器给电容充电,通过继电器控制电容充电和放电时间。
1.4电容的选择
电容在整个电磁炮组成中起着至关重要的作用,作为整个电磁设备的储能装置,可以为电磁炮的发射提供足够能量。
所以电容的电荷和电压决定了电磁炮的发射动力。
方案一:采用小电容并联方式给电磁炮提供动力,当采用并联方案时,电容容量变大,耐压值变为并联电容中电压最小值,此方案会使用较多电容,使用更多资源,但成本较低。
方案二:采用一个大电容给电磁炮提供动力,大电容可以储存更多电量,还可以优化电路结构,减少资源使用,且大电容更能保证安全。
经过多次实验和理论分析,本设计决定采用一个100V 、10000滋F 的大容量电容给电磁炮提供动力。
2
理论分析和计算
2.1
电容大小计算
电容器电势能计算公式:e =cu 2/2=qu /2多电容器并联计算公式:c =c 1+c 2+c 3+…+c n 多电容器串联计算公式:1/c =1/c 1+1/c 2+…+1/c n
式中,e 为电势能;c 为电容;u 为电压;q 为电荷量。
2.2弹丸发射角度与距离的计算
当电磁炮供电电源和弹丸大小一定时,通过调整舵机角度测得以下实验数据,如表1所示。
经过多次实验调试和数据采集分析,当舵机角度为40°时,发射距离最大。
经过数据分析和计算,理论距离与舵机角度公式:
S =-2.18X 2+91.83X +101.8
式中,S 表示距离;X 表示角度。
3
电路与程序设计
3.1
电路总体设计方案
电路总体设计方案如图2所示。
图1系统整体框架
Sheji yu Fenxi
111
3.2程序设计
本系统采用模块化结构设计,以KEIL 为STM32单片机开
发环境,提供了C 编译器及功能强大的仿真调试等完整的开发方案,以OpenMV IDE 为OpenMV 的开发环境,使用python 进行语言编译,实现数据采集和单片机之间的通信,二者协同工作,使各功能组态更简洁明了,使用更便捷。
3.2.1
OpenMV 实现主要思想
导入所需模块,完成初始化设置,然后进行图像处理。
设置QQVGA 模式,即屏幕大小为180mm ×120mm ,根据先前设置的颜色阈值(红色目标),实现颜色追踪功能,再调用OpneMV 相关库,将目标标记出来,然后选取目标最大色块进行标记,即最后屏幕上只标记目标最大色块,然后读取目标色块的横坐标、纵坐标,并通过串口通信发送给STM32单片机,进行相关处理后,进一步控制舵机,同时根据摄像头成像相关原理,依据实际距离和像素关系,读取目标与摄像头直线距离,同样通过串口通信发送给STM32单片机。
3.2.2
STM32实现主要思想
STM32作为控制板,分为基础部分和发挥部分。
首先通过按键输入,整体上分为5个模式,分别对应基本方法的3种功能实现。
通过按键进入模式2,OLED 会进行显示,比较清晰。
模式2实现输入距离,控制线圈炮将炮弹打出。
然后再次按键,切换到模式3,通过函数的调用,实现输入距离和角度,控制炮弹发射。
发挥部分主要通过串口通信接收来自OpenMV 的数据,包括点坐标和距离,并读取写入STM32程序,实现对云台舵机的调整,进而对移动目标进行跟踪。
3.2.3
程序流程图
程序流程图如图3所示。
4
系统测试
4.1
测试仪器
(1)卷尺;(2)220V 交流电源;(3)靶子;(4)目标标识物;
(5)量角器;(6)秒表。
4.2
测试方案
(1)搭建好场地后,连接电路电源。
(2)分别对基本部分和发挥部分进行测试。
(3)通过按键选择测试内容。
(4)观察弹丸击中的目标靶数并记录靶数和所用时间。
4.3测试结果
基本要求测试结果如表2所示,发挥部分测试结果如表3
所示。
4.4
测试结果分析
通过测试结果可以看出,测量值存在较大偏差,且在发挥
部分的测试结果并不理想,离预期还有一定的差距。
经过对这个运动过程的分析发现:舵机在转动过程中产生的震动会对摄像头数据的采集和弹丸的发射产生一定影响,并且所使用的弹丸材质不同也会对结果有一定影响,经过多次实验发现,带磁性的物质发射距离更远,运动过程也更加稳定。
5结语
本设计利用所学专业知识,完成了模拟电磁曲射炮的设
计与调试工作。
模拟电磁曲射炮经过测试,可以较为精准地击中目标,但是模拟电磁炮在调试过程中也还存在一些问题,例如,OpenMV 在不同光照环境下的识别可能会出现识别结果错误,或者OpenMV 的识别会受到与目标相似干扰物的影响等。
这些问题都需要在以后的改进和调试过程中解决。
收稿日期:2019-10-09
作者简介:张泽旭(1999—),男,山东淄博人,研究方向:机电。
表1
实验数据
舵机角度/毅
距离/
cm
第
一次第二次第三次第四次第五次平均值010510099.5101.5103101.810185169170.0172.0170173.220250230234.0226.0220232.025*********.0251.0254252.430260253270.0268.0272264.635269276271.0273.0273272.440270285277.0271.0272275.045
270
274
270.0
273.0
270
271.4
图2
电路总体设计方案
图3程序流程图
表2
基本要求测试结果
题目靶数及完成情况(所用时间)
第一次测试第二次测试第三次测试1完成,5s 完成,4s 完成,5s 28环,9s 6环,9s 9环,8s 3
9环,10s
9环,9s
7环,9
s
表3发挥部分测试结果
题目
靶数及完成情况(所用时间)
第一次测试第二次测试第三次测试16环,8s 5环,11s 7环,9s 23环,7s
7环,9s
4环,10s
yu Fenxi
112。