急回运动特性
最新《急回特性、死点位置》教案

《机械基础》教案教学环节教学内容教学说明组织教学1、学生与老师互致问候;2、清点人数;3、点评上次课的作业。
提示学生集中注意力回顾旧课1、铰链四杆机构的组成:机架、连架杆、连杆2、铰链四杆机构的分类:曲柄摇杆机构、双曲柄机构双摇杆机构3、铰链四杆机构的:1)、曲柄摇杆机构以最短杆的相邻杆作为机架2)、双曲柄机构以最短杆作为机架3)、双摇杆机构以最短杆的相对杆作为机架4、曲柄存在的条件:1)、最短杆与最长杆的长度之和小于或等于其他两杆长度之和2)、连架杆和机架中必有一杆是最短杆三种基本类型的运动过程一定再演示一遍,加深学生的印象,一方面因为这是上次课的重点,另外它还是今天新课内容的铺垫。
通过对上一节知识的复习,将问题引入到本节的教学课题上来讲授新课动画导入、提出问题、引发思维、诱趣探求1、动画导入、设疑1)动画导入1)问题通过提问和动画演示的方式激发学生的兴趣,同时增加学生的感性认识培养学生的观察能力和分析问题的能力讲授新课“影片中刨刀的往复运动速度是否相同?”学生很快可以看出,刨刀的运动速度不一样,当它进行切削加工时速度较慢,而不做功的回程速度较快,这时我会告诉学生刨刀的这种运动特性称为急回特性。
那么这急回特性是如何产生的呢?它产生的条件是什么,它在生产中又有什么意义呢?带着这些问题进入新课。
2、探索研究新课的第一个问题是要找出急回产生的原因,这是本节中的第一个难点,为了突破这个难点,我把它的探究过程分为以下四步:第一步:演示曲柄摇杆机构,提出问题。
学生根据前面的复习内容,结合图片演示不难看出,曲柄做等速回转时,会使从动的摇杆获得变速摆动,也就是它的空回行程比工作行程速度要快,从而得到这样一个结论:在曲柄摇杆机构中存在有急回特性。
第二步:继续演示机构,提出共线的问题。
学生很快会发现在曲柄回转这一周的过程中会和连杆出现两次共线,而且两者共线时,摇杆刚好处于一左一右两个极限位置,这时我会给出极位夹角的概念,并在图中明确的表示出来,这个重点概念的给出为后面的推导做好了铺垫。
铰链四杆机构的急回特性

V空 V工
空回行程
工作行程 C
C1
C2
K=
Φ1 Φ2
=
180º+θ 180º-θ
θ B
B2 ω φ1 A
φ2 B1
ψ D
分析θ
?极位夹角θ
摇杆位于两极限位置时, 曲柄所夹的锐角。(定义)
空回行程 工作行程 C
C1
?由K=
180º+θ 180º-θ
得θ的大小?
θ
θ=180º
K-1 K+1
B B2
φ1 A
感谢领导和同事们的光临指导!
再见
ψ
曲柄等速转动情况下,摇杆往
复摆动的平均速度一快一慢,
机构的这种运动性质称为急回
D
特性。
(空回行程的平均速度大于
φ2
工作行程的平均速度的这种
B1
C1D C2D φ1 C1D C2D φ2
性质)
Φ1>φ2
t1 > t2
v2 > v1
摇杆C点平均速度
演示
二、急回特性系数K
从动件空回行程平均速度 K= 从动件工件行程平均速度 =
《机械基础》
教学目标
1、掌握急回特性的有关概念 2、掌握衡量急回特性大小的参数并 能进行简单的计算
3、能分析急回特性机构的应用实例
一、急回特性的概念
空回行程
工作行程 C
C1
C2
1. 机构极位: 曲柄回转一周,与连杆两次共
线,此时摇杆分别处于两极限 位置,称为机构极位。
θ B
B2 ω φ1 A
2. 急回特性:
★曲柄摇杆机构应用实例
破碎机
★ 双曲柄机构应用实例
不等长双曲柄机构: 如:惯性筛
平面四杆机构的急回特性
A C ; + A B ; - B 2 C  ̄
—
—
,
经过 计算 可 知 该值 为0 . 1 7 3 , 即 c , A B ’ =
‘ ‘
2 AC 2 ‘ AB 2
8 0 . 1 。 ; 按 照类 似 的方 式 , 能 够 计 算 出C O S C A B . = O . 9 1 9 , 即 C
凸 ^ D
详 细计 算 方 式 可 采 用 公 式 : t a n  ̄= t X D, 而该角度确定之后 , 速
关 键 词 :四 杆 机 构 平 面 机 构 极 住 夹 角
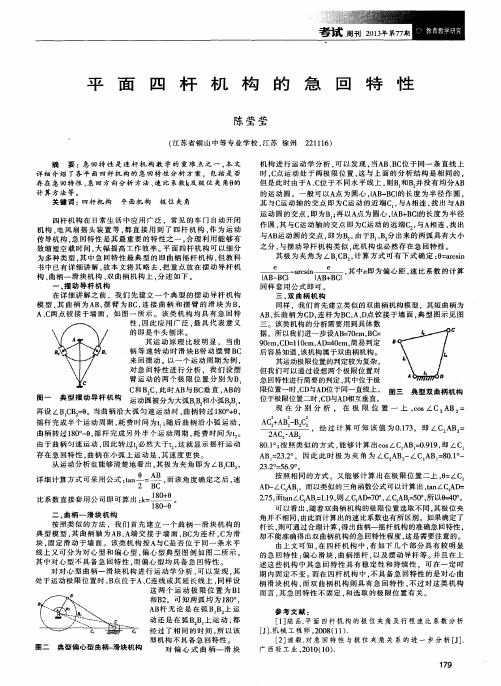
机构 进行 运 动 学 分 析 , 可 以 发现 , 当A B 、 B C 位 于 同 一 条 直 线 上 时. C 点运动处于两极限位置 . 这与上面的分析结构是相 同的. 但 是 此 时 由于A、 C 位 于 不 同 水平 线上 , 则B . 和B , 并 没有 均分 A B
平
面
四 杆
机
构
的
急
回
Hale Waihona Puke 特性 陈 莹 莹
( 江 苏 省 铜 山 中等 专 业 学 校 , 江苏 徐州 2 2 1 1 1 6 )
摘 要 :急 回 特 性 是 连 杆 机 构 教 学 的 重 难 点之 一 , 本 文 详 细介 绍 了各 平 面 四杆 机 构 的 急 回 特 性 分 析 方 案 , 包括 是 否 存在 急 回特 性 、 急回方向分析方法 、 速 比 系数 k 及 极 位 夹 角0 的 计算方法等。
的运 动 圆 。一 般 可 以A 点为圆心 , l A B — B C I 的长 度 为 半 径 作 圆 , 其 与C 运 动轴 的交 点 即为 C 运 动的近端C . , 与A 相连, 找 出 与A B
铰链四杆机构的运动特性急回特性

这时摇杆CD处于最左和最右的位置:C1D和C2D。
也就是摇杆的两个极限位置。
B
C1
C C2
A
B2
D
B1
曲柄摇杆机构
3
铰链四杆机构的急回特性
一、概念: 1、极位:当曲柄摇杆机构处于两个极限位置时,称为 极位。 2、极位夹角:曲柄与连杆两次共线位置之间的夹角称
为极位夹角,用字母 表示。
15
作行程(慢行程)的平均速度小于空回行程(快行程) 的平均速度,则称该机构具有急回特性。
工作行程: 切制工件 空回行程:刀具返回
8
铰链四杆机构的急回特性
四、急回特性系数 为能定量描述急回运动,将回程平均速度V2与工作行
程平均速度V1之比定义为行程速度变化系数即急回特性 系数,用K来表示。
由上式可观察出:
3、摆角:摇杆在两个极限位置的夹角称之为摆角,用
字母 表示。
思考:
极位夹角是取其所夹的锐角还是取其所夹的钝角?
为讨论及计算方便:取锐角。
4
铰链四杆机构的急回特性
二、分析:曲柄运转一周:
1、行程 1:曲柄由AB1顺时针转动到AB2时,转过的角度是1
=180º+ ;耗时为t1; 行程 2
B
C1
1
6
铰链四杆机构的急回特性
因为:
1 > 2 且曲柄匀速旋转
所以:
t1
1 1
180 1
又因为:
> t2
2 1 > t2
所以:
_
_
V1 C1C2 t1 < V2 C1C2 t2
即:摇杆返回速度较快;
这里就称它具有急回特性。
急回特性

如: 车门启闭机构
★ 摆动导杆机构应用实例
练一练 计算
如图所示,θ=30° 如图所示,θ=30°,该机构的急回特性 空回行程 系数k为多少? 系数k为多少?
工作行程
C1 C
解: k= 180º+θ 180º-θ 180º+30º = 180º-30º
=1.4
ψ θ B φ1 B2 A φ2 D
B1
θ B ω φ1 B2 A φ2
C
C2
ψ
K=
Φ1 Φ2
D
B1
分析θ 分析
?极位夹角θ 极位夹角
摇杆位于两极限位置时, 摇杆位于两极限位置时, 曲柄所夹的锐角 所夹的锐角。 定义) 曲柄所夹的锐角。(定义)
180º+θ º+θ ?由K= 180º-θ º K-1 θ=180º K+1 的大小? 得θ的大小? 的大小
三、机构急回特性的作用及应用实例分析 1、作用 、 实现变速要求,节省空回时间, 实现变速要求,节省空回时间, 提高工作效率
2、应用实例分析
★曲柄摇杆机构应用实例
破碎机
★ 双曲柄机构应用实例
不等长双曲柄机构: 不等长双曲柄机构: 如:惯性筛
惯性筛机构
插床主运动机构:自学
反向平行双曲柄 反向平行双曲柄 机构: 机构:
空回行程 工作行程
C
ψ θ
B φ1 B2 A φ2 D
B1
分析关系: 分析关系:
180º+θ º+θ 观察 K= 180º-θ º ?θ=0º,k=?,表示? , ,表示? k=1,无急回特性 , ?θ≠0º,k=?,表示? , ,表示? K>1,有急回特性 , 如何变化, ?θ↗,k如何变化,表示? ↗ 如何变化 表示? k ↗ ,急回特性愈显著
连杆机构-4.铰链四杆机构

9.3平面四杆机构的设计
设计类型 :
1.实现给定的运动规律:给定行程速 比系数以实现预期的急回特性、实现 连杆的几组给定位置等。 2.实现给定的运动轨迹:要求连杆上 某点沿着给定轨迹运动等。
设计目标 :
根据给定的运动条件,选定机构的类 型,确定机构中各构件的尺寸参数。
设计方法 :图解法、实验法和解析法等。
9.2 铰链四杆机构的基本性质
1.急回特性 :
—摇杆的摆角, —极位夹角。
为描述从动摇杆的急 回特性,在此引入行
K = 180 +
程速比系数 K,即:
180 -
K值的大小反映了急回运动特性的显著程度。K值的大
小取决于极位夹角 ,角越大,K值越大,急回运动 特性越明显;反之,则愈不明显。当时 0 ,K=1 ,
2.按给定的行程速比系数设计四杆机构
设计具有
急回特性
的四杆机
构,关键
是要抓住
机构处于
极限位置
时的几何
关系,必
要时还应
考虑其他
辅助条件。
例:已知摇杆长度L=100,摆角 =50 和行程速比
系数k=1.4,试设计曲柄摇杆机构。
解:由给定的行程速比系 数求出极位夹角 :
180 K1
K1
=
30
C1
Fn Fsin Ft Fcos
压力角愈小,机构的传力效果愈好。所以, 衡量机构传力性能,可用压力角作为标志。
Fn
F
Ft vC
在连杆机构中,为度 量方便,常用压力角 的余角即连杆与从动 件间所夹的锐角(传 动角)检验机构的传 力性能。
传动角愈大,机构的传力性能愈好,反之则不利于机构 中力的传递。机构运转过程中,传动角是变化的,机构 出现最小传动角的位置正好是传力效果最差的位置,也 是检验其传力性能的关键位置。
具有急回特性的平面四杆机构的比较与应用

具有急回特性的平面四杆机构的比较与应用急回特性是平面四杆机构的一个十分显著的特征,一般情况下,会用行程速比系数K来科学衡量急回运动的程度,准确科学分析平面连杆机构的急回运动特性在结构中的运运情况,这对提高我国机构生产的效率具有非常重要的现实指导意义与理论意义。
急回特性;平面四杆机构;应用;比较平面四杆机构[1]的重要特性就是急回特性,这种特性不仅能够显著提高我国工业生产的效率,而且可以进一步缩短机构在非工作行程中的运行时间,从而使工作运行的速度大幅度提升。
本文正式基于这样的研究背景,对四种典型平面四杆机构的急回特征进行分析,在此过程中对这四种不同的急回特征平面机构的动力传递以及运动变化情况、急回程度等内容展开论述,从实际的应用中针对上述问题进行阐述,从而希望平面四杆机构为我国的工程实践提供科学的技术与理论指导。
平面四杆机构急回特性的比较应用分析从实践中可以发现,双曲柄机构、曲柄摇杆机构、摆动导杆机构以及偏置曲柄滑块机构[2]这四种四杆结构都具有急回性特征,因此在一定程度上都能够满足我国现代工业中对某些机械的急回性要求。
但是研究发现,这几种不同类型的四杆机构的急回性特征都存在一定的区别,其中曲柄摇杆机构、摆动导杆机构以及偏置曲柄滑块机构这三种四杆机构如果组成各机构杆件的具体尺寸一旦确定,则意味着科学衡量四杆机构急回性特征的行程速比系数K与其参数极位夹角θ的值也就得到确定。
所以,在这过程中四杆机构的急回性特征并不发生变化。
与后三种四杆机构的急回性特征不同,在双曲柄四杆机构中用来科学衡量四杆机构的行程速比系数K与急回特性的参数极位夹角θ,同四杆机构主动件的起始相互位置存在一定的关系,如果主动曲柄的起始部位存在变化,就会导致机构的相关参数发生变化,因此四杆机构的急回程度也就存在差异。
从上述分析中可以发现,双曲柄四杆机构的急回性并不是固定不变的。
平面四杆机构运动转化的比较应用分析具有急回特性的平面四杆机构的主动件一般都是曲柄,因此机构在进行运动的过程中,曲柄的主动件就会环绕机架进行转动,而连杆通常情况下都在进行平面运动,但是曲柄的从动件则会有多种不同类型的机构形式以及多种不同类型的运动形式。
(完整版)铰链四杆机构的运动特性——急回特性

即:摇杆返回速度较快;
这里就称它具有急回特性。
8
铰链四杆机构的急回特性
三、急回特性: 从动件作往复运动的平面连杆机构中,若从动件工
作行程(慢行程)的平均速度小于空回行程(快行程) 的平均速度,则称该机构具有急回特性。
工作行程: 切制工件 空回行程:刀具返回
9
铰链四杆机构的急回特性
四、急回特性系数 为能定量描述急回运动,将回程平均速度V2与工作行
程平均速度V1之比定义为行程速度变化系数即急回特性 系数,用K来表示。
由上式可观察出:
1、只要极位夹角 0 , 就有 K>1,机构就具有急回
特性。 2、而且越大,K值越大,机构的急回性质越明显。
10
铰链四杆机构的急回特性
五、急回特性的意义 当曲柄摇杆机构具备了急回运动特性后,就可以
利用急回运动特性来缩短机械空回行程的时间,提高 机械的工作效率。
2
铰链四杆机构的急回特性
曲柄摇杆机构的运动动画
3
铰链四杆机构的急回特性
分析: 当曲柄AB为主动件时,在其运动一周中,有两次与连杆
共线: 即AB1C1和AB2C2:C1D和C2D。
也就是摇杆的两个极限位置。
B
C1
C C2
A
B2
D
B1
曲柄摇杆机构
4
铰链四杆机构的急回特性
13
铰链四杆机构的急回特性
复习巩固: 1、摆角和极位夹角的含义? 2、何为急回特性? 3、急回特性系数K与什么有关? 4、急回特性有何意义?
14
铰链四杆机构的急回特性
作业: 练习册 P59 一、6—15、6—16 二、6—18、6—19 三、6—22、6—23 四、6—25。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
急回运动特性
四杆机构中,当曲柄为主动件做匀速回转时,从动件摇杆的往返摆动行程和往返速度往往是不一样的,返程比往程要快,这种运动特性称为急回特性。
急回运动的特性广泛应用于生产实际,它可以使工作行程平均速度小,因而工作行程平稳,非工作行程速度加快,以缩短非工作时间,达到提高工作效率的目的。
平面连杆机构的特性
(1)急回特性:很多机械设备利用这个特性来缩短非生产时间,提高生产率。
(2)死点位置:会使从动件出现卡死或运动不确定的现象,一般采用飞轮的惯性使机构通过死点位置。
(3)压力角:作用在从动件上的驱动力与该力作用点的绝对速度之间所夹的锐角称为压力角。
压力角越小,有效分力越大,即压力角可作为判断机构传动性能的标志。
(4)传动角:为度量方便,习惯上采用压力角的余角来判断机构的传动性能,这个余角称为传动角。
因此传动角越大,机构的传动性能越好。