SSC32舵机控制器用户手册
DC-IIIS型自动操舵仪使用说明书
DC-ⅢS型自动操舵仪使用说明书上海航海仪器责任公司2011年5月DC-ⅢS自动操舵仪使用说明书技术责任会签单编制:校对:标审:审核:质量会签:审定:批准:目录1. 概述------------------------------------------------------------------------------------------- 32. 主要技术参数------------------------------------------------------------------------------- 33. 系统组成------------------------------------------------------------------------------------- 4 3.1 配套------------------------------------------------------------------------------------------- 43.2 必需的配套仪器----------------------------------------------------------------------------- 44. 仪器组成-------------------------------------------------------------------------------------- 4 4.1 主操舵台-------------------------------------------------------------------------------------- 4 4.1.1 1#泵启动和报警模块、2#泵启动和报警模块--------------------------------------- 4 4.1.2 电源开关------------------------------------------------------------------------------------- 4 4.1.3 系统选择开关-------------------------------------------------------------------------------- 5 4.1.4 模式选择开关-------------------------------------------------------------------------------- 5 4.1.5 应急操舵开关-------------------------------------------------------------------------------- 5 4.1.6 主随动发令模块---------------------------------------------------------------------------- 5 4.1.7 显示器模块---------------------------------------------------------------------------------- 5 4.1.8 1#电源滤波组件、2#电源滤波组件---------------------------------------------------- 6 4.1.9 KZQ-I控制器和KZQ-II控制器------------------------------------------------------------ 6 4.1.10 报警器--------------------------------------------------------------------------------------- 7 4.2 舵角反馈器------------------------------------------------------------------------------------ 7 4.3 操舵控制箱------------------------------------------------------------------------------------- 74.4 1#、2#舵机启动箱---------------------------------------------------------------------------- 75 操作说明-------------------------------------------------------------------------------------- 7 5.1. 操舵仪的启动与停止----------------------------------------------------------------------- 7 5.1.1 启动-------------------------------------------------------------------------------------------- 7 5.1.2 停止-------------------------------------------------------------------------------------------- 8 5.2. 控制系统的选择----------------------------------------------------------------------------- 8 5.3 手动应急操舵--------------------------------------------------------------------------------- 8 5.3.1. 舵机舱应急操舵---------------------------------------------------------------------------- 8 5.3.2 主操舵台应急操舵------------------------------------------------------------------------- - 9 5.4. 随动操舵-------------------------------------------------------------------------------------- 9 5.4.1 主操舵台随动操舵-------------------------------------------------------------------------- 9 5.5 自动操舵------------------------------------------------------------------------------------- 9 5.5.1 自动操舵方法------------------------------------------------------------------------------- 9 5.5.2 航向的设定---------------------------------------------------------------------------------- 10 5.5.3 自动限舵角度的设定---------------------------------------------------------------------- 10 5.5.4 自动操舵参数设定-------------------------------------------------------------------------- 10 5.5.5 自动操舵性能的优化------------------------------------------------------------------------ 115.6 操舵仪的报警系统------------------------------------------------------------------------- 12 5.6.1 操舵仪控制器报警------------------------------------------------------------------------- 12 5.6.2 舵机警报------------------------------------------------------------------------------------- 12 5.6.3 操舵仪控制器失电报警------------------------------------------------------------------- 12 5.7 照明调光------------------------------------------------------------------------------------- 12 5.7.1 显示器调光--------------------------------------------------------------------------------- 12 5.7.2 随动发令模块调光------------------------------------------------------------------------- 135.8 语言选择------------------------------------------------------------------------------------- 136. 安装------------------------------------------------------------------------------------------- 137. 试验------------------------------------------------------------------------------------------- 13 7.1系泊试验------------------------------------------------------------------------------------- 13 7.2航行试验------------------------------------------------------------------------------------- 147.2.1 舵角倍率的设定--------------------------------------------------------------------------- 148. 安全和维护保养---------------------------------------------------------------------------- 159. 备品与备件---------------------------------------------------------------------------------- 1510. 保证事项------------------------------------------------------------------------------------- 15 附图1------------------------------------------------------------------------------------------------- 16DC-ⅢS型自动操舵仪使用说明书1 概述DC-ⅢS型自动操舵仪是船舶航行的重要设备。
舵机控制教程
舵机控制教程Title: A Tutorial on Servo Motor ControlChapter 1: IntroductionIntroduction to Servo Motors- Definition and functionality of servo motors- Applications of servo motorsChapter 2: Working Principle of Servo Motors Components of Servo Motors- DC motor- Control circuit- Feedback systemWorking Mechanism- Position control- Speed control- Torque controlChapter 3: Controlling Servo MotorsUnderstanding PWM (Pulse Width Modulation)- Definition and working principle- PWM frequency and duty cycleConnecting Servo Motors to Microcontrollers- Pin configurations- Power supply requirementsProgramming Servo Control- Initializing PWM output- Setting pulse width for desired position- Adjusting parameters for speed and torque control- Handling servo motor signals for smooth motor movementChapter 4: Tips for Efficient Servo Motor ControlCalibrating Servo Motors- Mapping servo positions to PWM pulse widths- Determining servo motor range- Fine-tuning servo motor movements- Correcting for non-linearityMinimizing Electrical Noise and Interference- Grounding techniques- Shielding servo and control wires- Using external filtersOptimizing Power Supply- Adequate voltage and current requirements- Reducing voltage drops and fluctuations- Considering power supply capacitorsImplementing Safety Measures- Using limit switches- Overcurrent and overheat protection- Error handling in control programsConclusion- Recap of servo motor control basics- Importance of accurate calibration and proper electrical setup for effective servo motor control- Potential future developments and advancements in servo motor technologyIn this tutorial, we have covered the basic principles of servo motor control, including their components, working mechanisms, and how to control them using Pulse Width Modulation (PWM). Wealso discussed the importance of calibrating servo motors, minimizing electrical noise, optimizing power supply, and implementing safety measures. By following this guide, readers should have a solid understanding of servo motor control and be able to apply it to their own projects.如何有效处理学习压力?在现代社会中,学习压力已成为许多人的普遍现象。
32路舵机控制器说明书

32路舵机控制器使用说明书舵机控制器说明图解如下:1)安装驱动详见《驱动》文件夹,按照里面的说明自行操作。
2)上位机软件页面介绍说明左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口。
舵机图标位置保存窗口如下图,舵机图标可自由拖拉,拖拉后保存位置。
舵机图标窗口,可自由拖拉如下人形的图标窗口,然后保存位置保存的位置一定要跟上位机软件在同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效COM口选择端,默认通讯速度为高速模式115200。
动作组调试运行窗口,上面是调试窗口,下面是运行窗口。
初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作。
擦除:对下载到主板上的动作组做清空操作。
运行动作组:运行已经下载到主板上的动作组。
停止:停止运行动作组。
脱机动作组:运行已经下载到主板上的动作组,并且下次开机直接执行该动作组。
禁用:禁用脱机动作组功能舵机口滑竿可以随意拖动B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100P表示舵机位置(默认为中位1500)范围为500-2500而导入动作组中的是绝对位置P0=B+P#表示几号舵机,P表示舵机的位置,T表示舵机运行到该位置的时间。
串口发送接收区输入代码点击发送按键即可,一般不常用。
调试好的舵机偏差值B 和动作文件P,B跟P需要独立保存,打开使用也需要独立操作,不能用P的打开窗口打开B保存好的文件。
所保存的文件皆是XML格式。
3)舵机板供电接口说明注意:如果USB一直插着只需要提供舵机供电电压,因为主板供电由USB提供,但是依然接着VSS电压不影响使用。
首先确定自己使用的舵机的供电电压(一般舵机为5V-7.2V),主板供电电压VSS为7V-12V,舵机控制板带有VSS供电低压报警喇叭,当VSS电压低于7V则喇叭一直报警,以提醒用户充电,也有效的保护电池过放.基本的供电方案可分为三种,实物接线图如下:第一种供电方案,此供电方案比较常用,主要用于给9个舵机以下的机器人或者机械手臂供电。
sscom32使用说明

注意:把文件夹拷贝到硬盘后,取消其只读属性,再运行。
如上图设置好通讯的参数,波特率要和仪表一致。
发送的第2、3 字符30 31 为仪表地址。
当仪表地址Addr 设为2时,相应发送数据为30 32。
Addr为25时,发送的第2、3 字符为32 35。
特别注意:字符串输入框中的数据格式。
显示方式选HEX显示则以16进制显示仪表返回的数据。
不同的型号仪表发送的数据格式不同,要根据说明书的通讯协议格式。
如智能测控仪仪表和巡检仪表一般发送:04 30 31 52 30 30 05
PID调节仪读PV发送04 30 31 52 30 30 05
读HA发送04 30 31 52 30 31 05
写HA =1230发送04 30 31 57 30 31 2B 31 32 33 30 2E 03
流量积算仪表读测量值累计量发送04 30 31 52 05
注意:把文件夹拷贝到硬盘后,取消其只读属性,再运行。
Super32用户使用说明书

第1章
1.2.1 程序要求 ..........................................................................................3 1.2.2 通讯要求 ..........................................................................................4 1.2.3 I/O要求 .............................................................................................4 1.2.4 电源要求 ..........................................................................................5 1.2.5 控制器选型 ......................................................................................5 第2章 2.1 2.2 尺寸与安装 ....................................................................................7 外形尺寸 ................................................................................................7 安装 ........................................................................................................7
舵机控制板使用说明
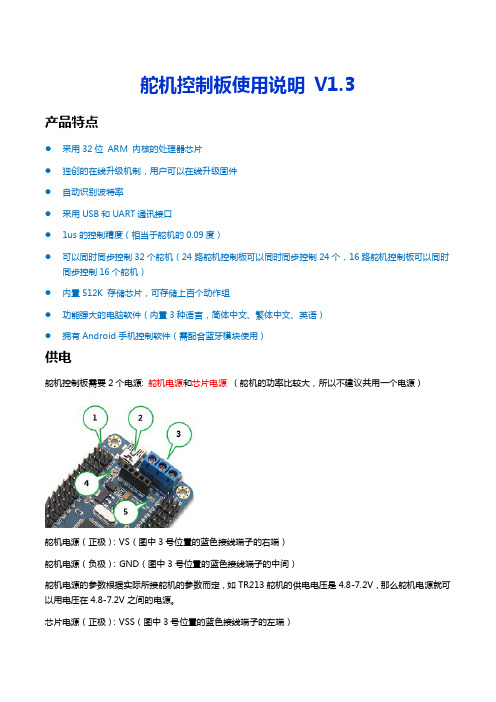
舵机控制板使用说明V1.3产品特点●采用32位ARM 内核的处理器芯片●独创的在线升级机制,用户可以在线升级固件●自动识别波特率●采用USB和UART通讯接口●1us的控制精度(相当于舵机的0.09度)●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时同步控制16个舵机)●内置512K 存储芯片,可存储上百个动作组●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语)●拥有Android手机控制软件(需配合蓝牙模块使用)供电舵机控制板需要2个电源: 舵机电源和芯片电源(舵机的功率比较大,所以不建议共用一个电源)舵机电源(正极):VS(图中3号位置的蓝色接线端子的右端)舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间)舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。
芯片电源(正极):VSS(图中3号位置的蓝色接线端子的左端)芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间)VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。
另外:1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。
2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必须是5V。
3. 1234. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表示芯片供电异常。
5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表示舵机供电异常。
2安装驱动驱动下载地址:/down/usc_driver.exe (全部是小写)直接双击usc_driver.exe ,点击下一步即可安装驱动。
应急舵操作说明

应急舵及操舵操作说明
应急舵操作说明
1.舵机房内,将操作地点选择开关(左、右舵机控制箱各一只)转至“舵机舱”
位置
2.给舵机操纵系统和动力机组供电
3.用简易操舵台进行操纵,使用操纵手柄控制舵角
4.联系方法,使用驾驶台-舵机房直通电话,或VHF与驾驶台联系
驾驶台操舵
1.舵机房内,将操作地点选择开关(左、右舵机控制箱各一只)转至“驾驶台”位
置
2.给舵机操纵系统和动力机组供电
3.选择操舵台上的操纵形式,进行操纵
自动舵操作说明
1.自动舵在工作时,一、二号舵号请勿同时使用,并且经常转换使用
舵机
2.每班至少试验一次自动舵的手动操作
3.在通航密度大的海区、狭水道航行、进出港航行、能见度受限等
情况下以及在其他航行危险时,应立即转至人工操舵
4.转换手动操舵或自动操舵必须值班驾驶员操作或在其监控之下进
行。
海洛斯操作手册(说明书)
HIROSS恒温恒湿机房精密空调操作手册HIMOD系列北京****科技有限公司技术部2009年01月01日目录第一章HIMOD系列海洛斯空调概述 (2)型号多 (3)控制技术先进 (3)制冷系统 (3)送风系统 (3)加湿系统 (3)加热系统 (4)1.7其它 (4)第二章HIMOD系列海洛斯空调型号含义 (4)第三章有关空调的一些资料 (5)气流组织方式(详见下图) (5)盖板纽开启方式(详见下图) (5)空调重量(单位:Kg) (5)机组尺寸及维护空间 (6)第四章制冷循环管路示意图 (7)风冷却(A型) (7)水冷却(W型) (8)双冷源(D型) (9)单系统(C型) (10)双系统(C型) (10)第五章调速风机调速接线示意图 (11)第六章MICROF ACE概述 (12)概述 (12)面板简介液晶显示屏 (13)液晶显示屏介绍 (13)第七章MICROF ACE面板的操作 (13)第八章控制器的使用 (14)控制器(HIROMATIC)概述 (14)控制器的操作 (15)菜单结构 (17)第九章日常维护及特殊维护 (18)日常维护 (18)特殊维护 (19)第十章常见报警及处理 (20)低压报警 (20)高压报警 (21)加湿报警 (21)失风报警 (21)电加热过热报警 (22)显示器发黑 (22)空调不制冷 (22)附录1:参数列表 (22)附录2:报警内容列表 (26)附录3:各菜单项含义: (28)第一章HIMOD系列海洛斯空调概述HIMOD系列海洛斯空调(HIMOD空调)是当今世界上最先进的机房专用恒温恒湿机房专用精密空调。
随着IT业的突飞猛进的发展,各种布局、面积差别很大的机房如雨后春笋般纷纷出现了,使用环境也不一而同。
为适应各种不同要求的机房,新开发的海洛斯HIMOD系列空调应运而生。
她是在保留她的前一代产品HIRANGE系列机房空调的优点,又应用了当今世界上提高了的制冷技术及制冷部件制造工艺,使用当今最先进的模块化设计理念生产出来的高科技机房空调产品。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
概述:USBSSC32路舵机控制是专为人形机器人、蜘蛛机器人、机械手等多舵机使用而量身定做的多路舵机控制器。
该控制器不但保留了原版的所有功能,还在原版的基础上作了升级,将原来的RS232串口改成了USB接口,方便电脑没有串口的用户使用。
控制器还增加蓝牙接口,可实现无线远程控制。
USBSSC32路舵机控制控制方式包括实时、定时、定速控制等,与lynxmotion的控制软件完全兼容.参数:1.输出通道:32路(脉冲调制输出或TTL电平输出);2.舵机供电:根据所接舵机额定电压供电,典型DC4.8V~6V;3.逻辑供电:DC6V~12V或USB供电(具有自恢复保险丝,调试时使用);4.驱动分辨率:1uS,0.09°;5.驱动速度分辨率:1uS/秒,0.09°/秒;6.通讯接口:USB/TTL串口接口;7.串口波特率:2400、9600、38.4k、115.2k可设置;接口描述:SSC32舵机控制板接口如下图所示:1.16-31号舵机信号控制引脚,其中G表示GND(黑色排针);V表示VCC(红色排针);S表示信号控制引脚(白色排针)。
使用时不要把线接反。
2.0-15号舵机信号控制引脚,其中G表示GND(黑色排针);V表示VCC(红色排针);S表示信号控制引脚(白色排针)。
使用时不要把线接反。
3.主控制芯片,采用DIP28脚的Atmega8L单片机,工作频率14.7456MHZ。
4.16-31号舵机控制电源输入,可以用来驱动一般的模拟或者是数字舵机。
工作电压4.8V -6V,可以使用5片镍氢电池组供电,其中VS2接电源正极,GND接电源负极。
5.0-15号舵机控制电源输入,可以用来驱动一般的模拟或者是数字舵机。
工作电压4.8V -6V,可以使用5片镍氢电池组供电,其中VS1接电源正极,GND接电源负极。
6.逻辑供电输入端,输入电压范围7.5-15V,通过内部的降压给电源提供稳定的5V电源,其中VIN接电源的正极,GND接电源的负极。
7.通信速率选择,通过两组指拨开关选择不同的通信波特率,对应关系如下:8.ABCD四组模拟/数字输入端子,可以设置为静止或者是锁存。
9.FT232rl通信芯片,提高通信的稳定性。
10.串口选择,默认通过跳线帽连接T、R引脚,去除引脚可以将串口留作它用。
B接口,用来连接控制板到电脑。
12.内部降压模块,采用78D05降压模块为控制单元提供稳定的5V电源。
13.扩展功能,暂时用不到。
14.蓝牙接口,可以通过额外的蓝牙模块轻松实现无线控制。
15.VS1与VS2短接跳线,当两组都插有跳线时,VS1=VS2.这时只需要在VS1或者VS2任意输入一组舵机电源即可;如果去除跳线,VS1与VS2为两组不同的电源输入,不同的舵机电源从VS1与VS2分别输入。
控制器命令集一.单个舵机和舵机群运动命令#<ch>P<pw>S<spd>...#<ch>P<pw>S<spd>T<time><cr><ch>:舵机通道号,0–31。
<pw>:脉冲宽度,单位微秒(us),500–2500。
<spd>:单通道的运动速度,单位us/秒。
(可选)<time>:所有通道的速度,单位毫秒(ms),最大65535。
(可选)<cr>:结束回车符,ASCII码中的13。
(必选)<esc>:取消当前的命令,ASCI码中的27。
一.单个舵机运动实例:#5P1600S750<cr>通道5将以750us/秒的速度移动到1600us位置。
为了更好的理解速度这个概念,举个例子,如上图所示的舵机与脉冲信号(PWM)的关系,当舵机从-90度到0度时,脉冲宽度为1ms 时间即1000us,也就是说1000us脉冲宽度舵机就会转90度,那么100us/秒的速度就表示舵机花10秒的时间就可以转到90度,2000us/秒的速度就表示舵机花0.5秒的时间就可以转到90度。
公式:运行时间(秒)=脉冲宽度(us)/速度(us/秒)。
#5P1600T1000<cr>通道5将在1秒内从任何位置移动到1600us位置。
舵机群运动实例:#5P1600#10P750T2500<cr>通道5移动到1600us位置,通道10移动到750us的位置,2个都同时在2500us内完成,这个命令能协调多个舵机的速度,即使2个舵机的初始位置相差很远,都可以使他们同时开始转动并同时停止到指定位置上。
这条命令非常适合人形双足机器人多舵机同时运动,可自动协调所有舵机的速度,完成复杂步态的同步。
你可以使用该命令进行速度和时间组合,组合必须根据下面的规则:1.所有通道的开始和结束将同时完成。
2.如果某个通道指定了速度,那么它将不会快于指定速度(可以根据需要调节移动速度)。
3.如果某个通道指定了时间,那么它将在指定的时间移动到指定位置(可根据需要调节移动时间)。
#5P1600#17P750S500#2P2250T2000<cr>通道5移动到1600us位置,通道17移动到750us的位置,通道2机移动到2250us的位置,整个动作需要2000us,但是通道17的舵机不会按500us/秒的速度运行,这个需要取决于通道17的初始位置。
假设通道17的初始位置在2000us,它被指定移动1250us,超过500us/秒的限制,那么他将至少花2500us完成动作,再假设通道17初始位置在1000us,只需要它移动250us,那么在500us/秒以内,那么他将花2000us完成动作。
注意:第一条定位命令不能包含速度和时间的,格式为“#<ch>P<pw>”,例如先发送一条“#0P1500<cr>”指令,确定舵机位置后,才可以发送带有速度和时间控制的指令,否则会发生不可意料的动作。
二.数字输出:#<ch><lvl>...#<ch><lvl><cr><ch>:舵机通道号,0–31。
<lvl>:通道输出逻辑电平,高‘H’或低‘L’。
<cr>:结束回车符,ASCII码中的13。
该通道将在接受到回车指令20ms内输出电平。
数字输出实例:#3H#4L<cr>该命令使通道3输出高电平(+5V),通道4输出低电平(0V)。
三.字节输出:#<bank>:<value><cr><bank>:0=通道0-7,1=通道8-15,2=通道16-23,3=通道24-31。
<value>:十进制输出(0-255),Bit0=LSB。
该命令允许一次性写入8位二进制,并将同时更新bank里的所有通道,更新将在接受到回车符号后20ms内完成字节输出实例:#3:123<cr>该命令使bank3输出十进制123,123(十进制)=01111011(二进制),bank3为通道24-31,那么bank3中通道26和31为0,其他通道为1。
四.查询运动状态:Q<cr>如果舵机正在转动,返回值为“+”,如果移动到指定位置,返回“.”。
这条命令的返回值可能延迟50us至5ms。
五.查询脉冲宽度:QP<arg><cr>返回值为一个字节(二进制),表示舵机当前的脉冲宽度,分辨率10us,比如脉冲宽度是1500us,那么返回为150(二进制)。
该命令可查询多个舵机的脉冲宽度,每个舵机一个字节,返回值将延迟50us至5ms,典型为100us。
六.数字输入读取:A B C D AL BL CL DL<cr>控制器上的A,B,C,D作为数字输入端,以二进制方式读取,输入低电平(0V)时返回ASCII“0”,输入高电平(5V)时返回ASCII“1”。
AL,BL,CL和DL将以ASCII方式返回数字输入读取值,如果输入为低电平(0V)或者自前一个*L指令后该端口曾经出现过低电平,则返回值为ASCII“0”。
如果输入一直是高电平(5V)并且自前一个*L指令后一直保持高电平,则返回值为ASCII“1”。
上电后ABCD初始被配置为数字输入口,有50K的弱上拉,平均每1ms检测输入值一次,去抖动需要15ms。
读出的逻辑电平在新的逻辑电平维持15ms前不会改变。
该读取指令可以群发,支持8个指令同时发送。
数字输入读取实例:A B C DL<cr>读取A,B,C和D(带锁存),如果A=0,B=1,C=1,D=0,那么返回值为“0110”。
八.模拟输入读取:VA VB VC VD<cr>控制器上的A,B,C,D作为模拟输入端,读取输入的模拟信号,将返回一个8位的二进制数。
A,B,C,D做模拟口时,禁止内部上拉,同时开启数字滤波功能以减噪,滤波后只读取端口电压8ms内变化量的最终值,返回“0”表示0V,返回“255”表示4.98V。
返回值=(输入电压*256)/5。
上电初始A,B,C,D将配置为数字输入并有内部上拉,第一次使用“VA VB VC VD<cr>”后,将配置为模拟输入并禁止内部上拉。
在设置成模拟输入后的第一次返回值无效。
模拟输入读取实例:VA VB<cr>以A、B为例,将会返回2个字节,比如A输入2V,B输入3.5V,那么返回102(二进制)和179(二进制)。
控制器的测试:SSC32舵机控制器使用之前需要安装USB驱动程序,否则无法使用。
驱动程序:/Drivers/VCP.htm下面将介绍使用Lynx Terminal软件来进行测试,软件安装步骤省略,完成后如下图所示:1.端口选择,在驱动安装完成后,系统硬件设备管理里会多出一个虚拟COM口,根据实际映射端口号选择。
2.通信参数设置,如右图所示,波特率默认115200,通过板上的指拨开关设置,数据通信格式为8N1。
3.通信参数设置完成后,点击“Connect”连接控制板。
4.Timeouts可以用来检测版本号,及“VER”测试。
5.命令行输入区,以键盘上敲击回车键结束,此命令行内不需要加<cr>。
6.清空命令行显示。
*在命令行内所有指令均以敲击回车键发送,不需要再加<cr>。
连接成功后,测试就正式开始了,在黑色框中输入命令:#0P1500#1P1500#2P1500回车后,你会看见L指示灯会闪烁,同时通道0、1、2的舵机会转动到中间位置。
#0P750#1P1000#2P2000T3000回车后,你会看见通道0比通道1和2运动的慢一些,但都会同时到达指定位置。