三阶随动系统串联校正的频率
实验五三阶系统串联校正
阶系统串联校正.实验目的1.知道系统开环放大倍数对系统稳定性的影响;2.根据要求,设计串联矫正环节.并适当地调整控制系统参数;3.通过对控制系统参数的调整,熟悉控制系统中校正装置的作用。
二.实验设备及仪器1 .模拟实验箱;2.虚拟仪器(低频示波器)3.计算机;4.MATLAB仿真软件。
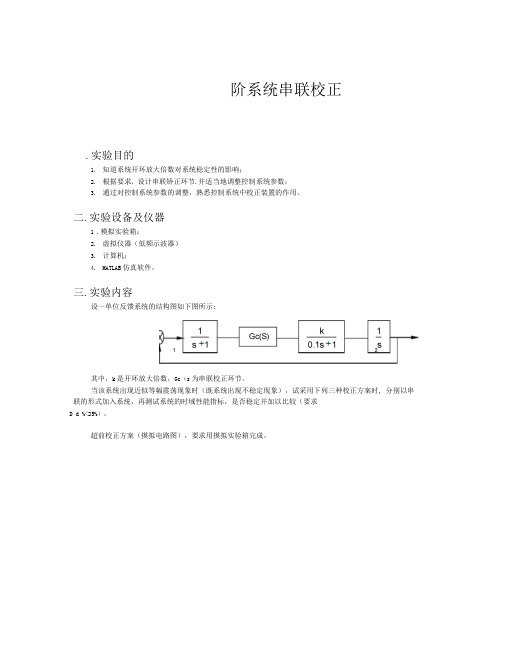
三.实验内容设一单位反馈系统的结构图如下图所示:其中,k是开环放大倍数,Gc(s为串联校正环节。
当该系统出现近似等幅震荡现象时(既系统出现不稳定现象),试采用下列三种校正方案时, 分别以串联的形式加入系统,再测试系统的时域性能指标,是否稳定并加以比较(要求D d %<25%)。
超前校正方案(摸拟电路图),要求用摸拟实验箱完成。
C 、T i s+1Gc(s)=:^^ , T I>T2T2S +121 2滞后校正方案(摸拟电路图)用 MAT L AB 仿真软件完成。
GcGA^^ , T2>T1C1R2I R3 II ~H ------ ---------- 1-<3-- ■+(摸拟电路图),用MATLAB 仿真软件完成。
G2(T 1S +1 i T 2s +1)Gc (s )= ----------------------- , T1>T2 , T3>T4(T 3s + 1f T 4s + 1)四.实验方法及步骤1. Gc(s)=1r(t)*R1A1ROc(t)----- a■R1i------ ig—1_____R0d —1 --R2 「(t)A1R4I R6 R5 r Jc(t)—•T 2S+1滞后一超前校正方案观测并记录该系统 K=5时的阶跃响应是否稳定,记录波形和有关数据;2Time offset: 02. 逐渐增大K 值,直到系统出现近似等幅震荡为止,记录 K=81.50.510Time offset: 0K=100.5 -1.50.54G 8 10Km 值;K=112Time offset; 0由图示可知:K=11时,出现等幅震荡。
三阶系统时域频域分析及校正

c)
Kc=3时,校正后单位阶跃响应曲线
x 10
22
Step Response
8 6 4 2 0
System: g0b Time (seconds): 99.3 Amplitude: 7.53e+22
Amplitude
-2 -4 -6 -8 -10 -12
System: g0b Time (seconds): 100 Amplitude: -1.14e+23
三、 进度计划
序号 设计内容 下发课程设计任务书,介绍课程设计的要求,介绍 MATLAB 软件及控制系统工具箱用法的基本知识。 完成时间 备注
1
1 月 19 日上午 (周一上午) 1 月 22 日 (周四) 1 月 23 日(周五)
2
利用 MATLAB 软件按任务书的要求进行控制系统分析和 校正设计,并撰写设计报告。
time=[0:0.01:200]; Kc=0.01; g0=zpk([],[0 -2 -5],50*Kc); g0b=feedback(g0,1); figure(1); step(g0b,time); grid; Kc=0.5; g0=zpk([],[0 -2 -5],50*Kc); g0b=feedback(g0,1); figure(2); time=[0:0.01:50]; step(g0b,time); grid; Kc=3; g0=zpk([],[0 -2 -5],50*Kc); g0b=feedback(g0,1); figure(3); time=[0:0.01:100]; step(g0b,time); %Kc=3时,校正后系统单位阶跃响应 %Kc=0.5时,校正后系统单位阶跃响应 %Kc=0.01时,校正后系统单位阶跃响应
(自动控制原理)频率法串联校正

分析频率法串联校正在系统自动化控制中的应用场景和优势。
PID控制器的频率法串联校正
PID控制器结构与调 节方法简介
介绍PID控制器的基本结构和调 节方法,为后续内容做准备。
频率法串联校正的 PID控制器实现
详细解释如何使用频率法进行 PID控制器的串联校正。
仿真实验结果分析和 控制效果评估
展示频率法串联校正在PID控制 器中的仿真实验结果和评估。
(自动控制原理)频率法串 联校正
本演示将介绍自动控制原理中的频率法串联校正方法。通过清晰地讲解基本 原理和实际应用,希望能够帮助大家理解和应用这一重要的控制技术。
简介自动控制原理
什么是自动控制原理?
解析自动控制系统的基本原 理和概念,为后续内容打下 基础。
为什么需要自动控制?
探讨自动控制的意义、优势 和应用领域,引发观众的思 考。
介绍模型预测控制法中模型建立和参数优化的方法。
3 控制效果的评估方法
评估模型预测控制法的控制效果和应用成果。
频率法串联校正的基本原理
1
频率法与串联校正的结合
探讨频率法与串联校正的结合,为后续内容铺垫。详细解释频率法串联校正的核心算法和计算过程。
3
系统自动化控制的应用场景和优势
实际应用案例
分享一些世界各地的成功自 动控制实例,增加实用性和 吸引力。
频率法的基本原理
频率响应特性
解释频率法在自动控制中的基本原理和特点。
相角和幅值的定义和测量方法
介绍相角和幅值的测量方法,展示实际情况。
模型预测控制法
1 MPC的基本原理
讲解模型预测控制法的基本原理和应用场景。
2 模型建立与参数优化
探讨频率法串联校正的未来研究方向和发展趋势。
自动控制原理7-2频率域中的无源串联超前校正
R1 R 2 1 R2
8
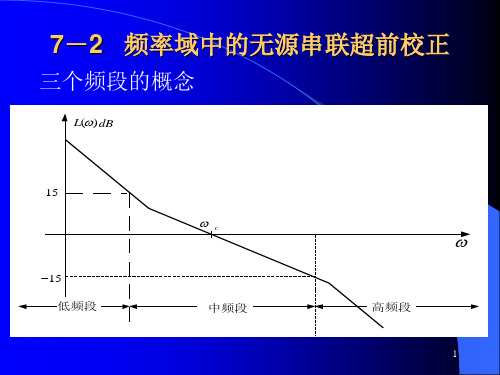
特点: 1. 幅频特性小于或等于0dB。是一个低通滤波器。 2. ()小于等于零。可看作是一阶微分环节与惯性环
节的串联,但惯性环节时间常数T大于一阶微分环节时间 常数T(分母的时间常数大于分子的时间常数),即积分效 应大于微分效应,相角表现为一种迟后效应。
L ( )
1
α 1 2 α
1 sin m 1 - sin m
α 1
α
12
10lg
50
10
8 6 10lg(dB)
m
40
30
20
10
4
2
0
1 3 5 7 9
0
11 13 15 17
19
当α大于15以后, m的变化很小,α一般取115之间。
6
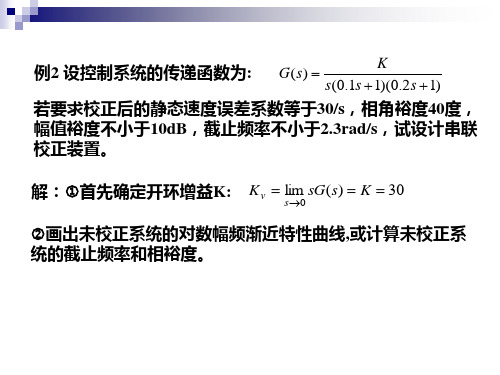
例1 若单位反馈系统开环传递函数为
13
L ( )
.
dB
60 40 20
20 40
L0
L
20
1
40
2 .1
0.01 20 20
0.1
Lc
0.5
40
10
( )
0
60
60
c
0
90
180
40
0 20
14
(3) 求值。确定原系统频率特性在=c处幅值下降 到0dB时所必需的衰减量ΔL。由等式 ΔL=20lg求取值。 由图得原系统在c处的幅频增益为20dB,为了 保证系统的增益剪切频率在ωc处,迟后校正装置应 产生20dB的衰减量:ΔL=20dB,即 20=20lgβ β=10 (4) 选取T值。为了使迟后校正装置产生的相位迟后 对校正后系统的增益剪切频率c处的影响足够小,应 满足,一般取 ωc=(5—10) 1/T 取
自动控制原理6.3 串联校正

10lg
1
,所对应的
就是
' c
,且 m
'。
c
§6—3 串联校正
4) 1
1 T
,m
1
T
,2
1
T
,
1
m
c' ,
2
m
c'
s
1
Gc s
1
s
1
Ts 1
Ts 1
2
5)画 Lc、L'、c、 ' 曲线。
1 sin 350 1 sin 350
1 0.57 1 0.57
0.27
则10lg 1
5.6db ,在L 上量
5.6db
所对
L
0
( )
db
-20 -20
1 c
1
'
2
c
+20
-40
-40
m
0
90
0
m '
校正装置
校正后系统
Gk s
100.45s 1 ss 10.12s 1
§6—3 串联校正
' 1800 c1 1800 900 tg10.45 4.3 tg14.3
tg1 0.12 4.3 900 62.70 76.90 27.30 48.50 450
3、步骤:
1)根据ess确定K;
2)根据K、υ绘制原系统的 L、,确定未校正
用频率法对系统进行串联滞后校正的一般步骤
100 50
0dB 0
-50 -100
10-2
100 0
-100
180
-200 -300
-2
10
-20dB/dec
-40dB/dec c0 12.6rad / s
-60dB/dec
10-1
2 100
6 101
102
0 55.5
-1
0
1
2
10
10
10
10
Mr
1
sin
2
K 2 1.5(M r 1) 2.5(M r 1)2 3.05
j )
6
a
100
c
180 arctg c a
90 arctg c
6
arctg 50c a
arctg c
100
接上页
c
180 arctg c a
90 arctg c
6
arctg 50c a
arctg c
100
57.7 arctg 3.5 arctg 175
a
a
a 0.78rad / s
这种校正方法兼有滞后校正和超前校正的优点,即已校正 系统响应速度快,超调量小,抑制高频噪声的性能也较好。 当未校正系统不稳定,且对校正后的系统的动态和静态性能 (响应速度、相位裕度和稳态误差)均有较高要求时,显然, 仅采用上述超前校正或滞后校正,均难以达到预期的校正效 果。此时宜采用串联滞后-超前校正。
这种选法可以降低已校正系统的阶次,且可保证中频区斜率 为-20dB/dec,并占据较宽的频带。
(1 s )(1 s )
Gc (s)
(Ta s 1)(Tb s 1)
(aTa s
三阶系统的分析与校正
三阶系统的分析与校正引言:在控制系统中,三阶系统是一种常见且重要的系统。
它具有更高的阶数,因此对于控制系统的性能和稳定性有着更高的要求。
因此,对于三阶系统的分析和校正具有一定的复杂性。
本文将围绕三阶系统的分析和校正展开讨论,并介绍常见的校正方法。
一、三阶系统的基本特点和模型表示三阶系统是一个具有三个自由度的系统,可以用如下的传递函数表示:G(s)=K/(s^3+a*s^2+b*s+c)其中,K为传递函数的增益,a、b、c分别为系统的阻尼、震荡频率和系统自然频率。
二、三阶系统的稳定性分析稳定性是控制系统设计和校正的基本要求。
对于三阶系统的稳定性分析可以采用Bode图和Nyquist图等方法。
1. Bode图分析通过绘制传递函数的幅频响应和相频响应曲线,可以得到系统的幅度余弦曲线和相位余弦曲线。
根据Bode图的特点,可以确定系统的稳定性。
2. Nyquist图分析Nyquist图是对传递函数的极坐标表示。
通过绘制传递函数的Nyquist图,可以分析系统的稳定性。
以上两种方法都可以用来评估系统的稳定性。
如果系统的Bode图和Nyquist图图像均在单位圆内,则系统是稳定的。
三、三阶系统的校正方法校正是为了使控制系统具有所需的性能指标,通过调整系统中的参数和控制器等手段实现。
1.PID控制器的设计PID控制器是最常用的控制器之一,具有简单、稳定、易于实现等特点。
PID控制器由比例控制、积分控制和微分控制三部分组成。
通过调整PID控制器中的三个参数,可以实现对三阶系统的控制。
2.根轨迹法根轨迹法是一种经典的校正方法,通过分析系统的根轨迹来设计合适的校正器。
根轨迹是描述系统根位置随参数变化而变化的曲线。
通过调整参数,可以使根轨迹满足设计要求,进而实现对系统的校正。
3.频率响应方法频率响应方法基于传递函数的幅频响应和相频响应特性进行校正。
根据系统的特性,通过调整增益和相位等参数,可以实现对系统的校正。
以上是常见的三阶系统的校正方法,可以根据实际需求选择合适的方法进行校正。
自动控制原理 第五章第十二节频率法串联校正——超前校正

① 由 e*ss
K
② 由 G0 (s) L0 (w ) wc0 g 0 wc0 , g 0 均不足
③ 确定 m = g * − g 0 + (5 ~ 10)
a = 1 + sinm , 10lg a 1 − sinm
④ 作图设计 A − B − C − D Gc (s)
⑤ G(s) = Gc (s) G0 (s) 验算是否满足要求
g = 180 + (wc1 )
= 180 + arctan 5.16 − 90 − arctan 5.16 − arctan 5.16
1.94
13.73
= 180 + 69.4 − 90 − 79 − 20.6 = 58.8 ( 60)
5.12 频率法串联校正——超前校正
例1
G(s) = K s(s + 1)
− +
1 1
a = 1 + sinm 1 − sinm
● 超前网络特点:相角超前,幅值增加
● 最有效的 a (4, 10)
● 一级超前网络最大超前角为60º
5.12 频率法串联校正——超前校正
2. 串联超前校正 实质 — 利用超前网络相角超前特性提高系统的相角裕度
超前校正步骤 (设给定指标 e*ss , wc* , g *)
= 1 aTs + 1 a Ts + 1
a = R1 + R2 1 R2
T = R1R2C R1 + R2
a Gc(s)
=
aTs + 1 Ts + 1
=
Gc (s)
5.12 频率法串联校正——超前校正
1. 超前网络特性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕 业 设 计 (论 文)设计(论文)题目:_ 三阶随动系统串联校正的频率__ 特性法设计及仿真研究_______单 位(系别):______自动化系______学 生 姓 名:___ 陈海龙_________专 业:__电气工程及其自动化__班 级:___ 05111106________学 号:___ 0511110629______指 导 教 师:_______汪纪锋_________答辩组负责人:______________________填表时间: 20 15 年 6 月重庆邮电大学移通学院教务处制编 号:____________审定成绩:____________重庆邮电大学移通学院毕业设计(论文)任务书设计(论文)题目三阶随动系统串联校正的频率特性法设计及仿真研究学生姓名陈海龙系别自动化系专业电气工程及其自动化班级 05111106 指导教师汪纪峰职称教授联系电话 42871150 教师单位自动化系下任务日期__2014 __年_12_月_ 20_ 日毕业设计(论文)开始后一周内完成。
重庆邮电大学移通学院毕业设计任务书(简明)技术资料一、设计题目:题目16 三阶随动系统串联校正的频率特性法设计及仿真研究二、系统说明:设三阶系统开环结构如下 (s)(s)(s)(0.11)(0.21)y k Gp r s s s =++ 三、系统参量:校正前:系统输入信号:r (t );系统输出信号:y (t );校正后:系统输入信号:u (t );系统输出信号:y (t );四、设计指标:1. 设定:在输入为r (t )=u (t)=a+bt ,(其中:a=4,b=1sec. ) 2. 在保证静态速度误差系数Kv =30 1sec.的前提下,其动态期望指标:040︒γ≥ ; 2.3c rad s ω≥ 。
五、设计要求:基于频率特性法,试设计一个串联校正闭环系统(如图示),以满足系统设计指标。
重庆邮电大学移通学院 自动化系指导教师: 汪纪峰2014.12摘要自动控制技术不仅广泛应用于工业控制中。
而且在军事、农业、航空、航海、核能利用等领域也发挥着重要作用,已经成为现代生产生活中不可缺少的部分。
而在控制系统中设计分析系统的方法很多,主要有根轨迹法,频域法,状态变量法及其设置观测器法等。
本文主要讨论的系统是三阶随动系统,通过串联校正的频率特性法来使其达到预期的性能指标,最后应用MATLAB/SIMULINK(或物理模拟)对设计系统进行仿真验证。
频率法校正是基于频率特性的方法来作系统校正,他与根轨迹校正一样,可以通过频率法校正来实现校正所要求的动态性能与稳定性能,所不同的是,在频率法校正中,校正所依据的是给定的频域性能指标。
在控制系统的分析与综合设计中,首先要建立系统的数学模型。
控制系统的数学模型是描述系统内部的物理量(或变量)之间关系的数学表达式。
在自动控制理论中,数学模型有多种形式。
时域中常用的数学模型有微分方程,差分方程和状态方程;复频域中有传递函数,结构图;频域中有频域特性;S平面的根轨迹特性等。
【关键词】自动控制三阶 MATLAB/SIMULINKABSTRACTAutomatic control technology is not only widely used in industrial control. And in military, agriculture, aviation, marine, nuclear energy also plays an important role, has become a modern production indispensable part of life. The design and analysis system in the control system in many ways, mainly root locus method, frequency domain method, the state variable method and set observer method. This article focuses on the system third-order servo system, through a series of frequency characteristic correction method to reach the desired performance. Finally MATLAB / SIMULINK (or physical analog) design system simulation.Frequency correction method is based on the method used to make the system frequency characteristic correction, he and root locus correction, as can be achieved by correcting frequency method of dynamic performance and stability required for calibration, the difference is in the frequency correction method, the correction It is based on a given frequency domain performance.In the analysis and synthesis design of control systems, the first to establish a system of mathematical models. Mathematical model of the control system is to describe the mathematical expression of the relationship between physical quantities within the system (or variable). Automatic control theory, mathematical model has many forms. The mathematical model used in the time domain have differential equations, differential equations and the equation of state; there is the complex frequency domain transfer function block diagram; the frequency characteristics in the frequency domain; root locus characteristics S plane and the like.【Key words】Automatic control third-order MATLAB/SIMULIN前言自动控制,就是在没有人参与的情况下,通过控制器或者控制装置来控制机器或者设备等物理装置,使得机器设备的受控物理量按照希望的规律变化,达到控制的目的。
对于一个控制系统首要的要求是系统的绝对稳定性。
否则系统无法正常工作,甚至可能导致设备毁坏,造成重大损失。
在系统稳定的前提之下,要求系统的动态性能和稳态性能都要好。
系统的动态性能和稳态性能都是由相应的性能指标来描述的,对于系统的性能要求可以简要概括为:响应动作要快,动态过程要平稳,跟踪值要准确。
在自动控制系统中,按阶数分类,可以分为一阶,二阶,高阶等。
在本次设计中主要涉及到线性定常三阶系统。
控制系统的校正问题,是自动控制系统设计理论的重要分支,也是具有实用意义的一种改善系统性能的手段与方法。
系统的设计问题,传统的提法是根据给定的被控对象和自动控制的基本要求,单独进行控制器的设计,使得控制器与被控对象组成的系统,能够较好的完成不可改变的部分。
但是近代控制系统的设计问题已经突破了上述的传统观念,例如,近代的不稳定飞行对象的设计,就是事先考虑了控制的作用,亦即控制对象不是不可改变的部分了,而是对象与控制器进行的一体化的设计。
系统的校正问题,是一种原理性的局部设计。
问题的提法是在系统的基本部分,通常是对象、执行机构和测量元件等主要部件,已经确定的条件下,设计校正装置的传递函数和调整系统放大系数。
使系统的动态性能指标满足一定的要求。
这一原理性的局部设计问题通常称为系统的校正或动态补偿器设计。
由于校正方式加入系统的方式不同,所起的作用不同,名目众多的校正设计问题或动态补偿器设计问题,成了控制理论中一个极其活跃的领域,而且它是最有实际应用意义的。
第一章系统的简介第一节线形控制系统当系统中各组成环节或元件的状态或特性可以用线性微分方程(或线性差分方程)来描述时,称这种这种系统为线性控制系统。
线性控制系统的特点是具有叠加性和均匀性(齐次性),及当系统存在几个输入时,系统的输入分别作用于系统时系统输出之和;当系统输入增加或缩小时,系统的输出也按同样比例增大或缩小。
如果描述系统运动状态的微分(或差分)方程的系数是常数且不随时间变化,则这种线性系统称为线性定常(或时不变)系统。
这种系统的响应形状只取决于输入信号的形状和系统的特性,与输入信号施加的时刻无关。
若微分(或差分)方程的系数是时间的函数,则这种线性系统称为线性时变系统,这种系统的响应不仅取决与输入信号的形状和系统的特性,而且与输入信号施加的时刻有关。
第二节自动控制系统的性能指标一个自动控制系统要完成预定的控制任务,必须满足一定的性能指标。
在实际控制系统中,往往由于具体对象和控制任务的不同,对控制系统性能指标的要求特不同。
虽然如此,仍可对各种控制系统的性能指标概括为3个方面,即稳(定性),快(速性),准(确性)。
具体的说,对于随动系统,就要求系统能迅速,准确地跟随给定值输入的变化而变化,而不受干扰的影响;对于定植控制系统,就要求系统能迅速克服干扰的影响,使被控量准确地恢复至给定值。
在自动控制系统中,把被控量不随时间变化的平衡状态称为“稳态”,而被控量随时间变化的不平衡状态为“动态”。
系统在动态阶段中,其被控量是不断变化的,这一随时间变化的过程称为动态过程,也称为过渡过程,瞬态响应过程或控制过程。
在本次设计中,主要研究的是三阶系统。
在保证静态速度误差系数Kv=30 1sec,要使其动态期望指标:040︒γ≥, 2.3c rad sω≥。