六旋翼飞行器容错飞行控制
六旋翼飞行器飞行原理

六旋翼飞行器飞行原理
六旋翼飞行器是一种具有六个旋翼的无人机,它通过旋转六个螺旋桨产生的升力来实现飞行。
这种飞行器的飞行原理可以简单地归纳为"旋翼产生升力,控制旋翼转速来实现飞行方向的调整"。
六旋翼飞行器中的每个旋翼都通过电动机驱动,使其快速旋转。
旋翼的旋转产生了气流,这种气流对着旋翼产生的螺旋桨叶片施加了一个向上的力,也就是升力。
通过控制旋翼的转速,可以控制升力的大小,从而实现飞行器的升降。
六旋翼飞行器通过调整旋翼的旋转速度来实现飞行方向的调整。
当飞行器需要向前飞行时,它会增加前方的旋翼转速,使得飞行器倾斜向前,而向后飞行则相反。
通过控制旋翼转速的差异,可以实现飞行器的转向、左右平移等操作。
六旋翼飞行器还配备了多个传感器和控制系统,以保证飞行器的稳定性和安全性。
例如,陀螺仪可以感知飞行器的姿态,从而调整旋翼转速来保持平衡;加速度计可以感知飞行器的加速度,从而调整旋翼转速来保持稳定。
这些传感器和控制系统的配合使得飞行器能够在空中保持平稳飞行。
六旋翼飞行器的飞行原理是依靠旋翼产生的升力和控制旋翼转速来实现飞行方向的调整。
通过精确控制旋翼的转速和调整飞行器的姿态,六旋翼飞行器能够实现高度灵活的飞行,并广泛应用于航拍、
搜救等领域。
六旋翼无人机飞行原理

六旋翼无人机飞行原理
六旋翼无人机是一种采用六个电动马达和旋翼组成的飞行器。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
六旋翼无人机采用的是旋翼的飞行方式。
旋翼是一种产生升力的设备,它的旋转使空气产生向下的压力,从而使飞机升空。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
六旋翼无人机采用的是电动马达产生动力。
电动马达是通过电能转化成机械能,带动旋翼旋转产生上推力。
六旋翼无人机的电动马达需要具有高功率和高效率,能够产生足够的推力以支持无人机的飞行。
六旋翼无人机还采用了先进的控制系统。
控制系统可以通过无线电通讯,实现对无人机的遥控和自主控制。
遥控器可以通过无线电信号,控制无人机的上下、前后、左右和旋转方向。
自主控制则是通过内置的传感器和计算机,实现对无人机的自主飞行和导航。
六旋翼无人机还具有良好的稳定性能。
六旋翼无人机采用的是六个旋翼,比四旋翼多两个旋翼,能够更好地保持平衡,并具有更好的机动性能和稳定性能。
此外,六旋翼无人机还采用了先进的控制系统,能够实现对无人机的精确控制和稳定飞行。
六旋翼无人机的飞行原理是通过电动马达带动旋翼高速旋转,产生上推力,从而使无人机升空并实现平稳飞行。
它采用了先进的控制系统,能够实现对无人机的遥控和自主控制,并具有良好的稳定性能。
未来,六旋翼无人机将会被广泛应用于物流配送、农业植保、环境监测和消防救援等领域,成为未来无人机市场的重要组成部分。
小型无人机容错控制系统设计
小型无人机容错控制系统设计
多旋翼小型无人机,越来越多的使用在工业级和消费级的领域,
随着世界各国对民用航空低空的开放,对低空航空器的限制日益严格,对其安全性要求也日益提高。
此类小型无人机安全性主要包括两个方面:一方面是严格管理操作人员,提高其操作能力来保证无人机工作
时的安全性;另一方面是采用性能稳定的控制系统,对控制系统进行
容错设计和其他安全性设计来保证无人机系统的可靠性和安全性。
本文针对小型六旋翼无人机的控制系统进行了容错设计来提高其控制
系统的可靠性和安全性。
主要包括传感器容错设计、控制器容错设计和执行机构容错设计,对其容错的原理进行分析,将容错系统与非容
错系统的可靠性进行了对比,并采用消费级电子器件完成了容错控制系统原理件设计。
根据小型多旋翼无人机的特点,对传感器采用物理余度方法进行容错设计,简化设计以利于工程实现。
对控制器,通过选择具有看门狗设计和电源监控设计的微控制器,结合软件功能实现故障检测与隔离。
对执行机构即旋翼驱动系统,采用基于模型的故障检测方法进行故障检测,并结合多模式切换的控制律设计,实现执行机
构故障的容错控制。
本文建立了六旋翼无人机的详细模型,并完成了控制算法设计。
以此为基础,重点针对旋翼控制的故障进行了故障模式的分析,实现了模式切换控制律设计和仿真。
设计结果表明,以现有微机电技术和微控制器技术基础,对小型无人机控制系统进行容错设计,在略微提高系统成本和重量的情况下,很大提高小型无人机系统
可靠性,而且工程实现可行性很高。
基于PIDNN的六旋翼无人机飞行控制算法研究

基于PIDNN的六旋翼无人机飞行控制算法研究徐会丽;石明全;张霞;王晓东;井光辉【摘要】Aiming at problem that parameters of six-rotor unmanned helicopter proportion integration differentiation(PID) controller are difficult to be optimized,a PID neural network (PIDNN)method which has characteristics of nonlinear mapping and self-learning,is developed and employed.It can adjust attitude control parameters dynamically and promote the self-adaptability of controller system.To prove the effectiveness of the method,the mathematical modeling for six-rotor is established by Simulink module in Matlab,PIDNN controller based on back propagation(BP) algorithm is obtained by S-function.Simulation results are compared with control effects of PID,verifying that control effect of PIDNN is more valid in reducing attitude adjustment time and decreasing overshoots.%针对六旋翼无人机比例-积分-微分(PID)控制器参数优化困难的问题,采用了PID神经网络(PIDNN)控制方法,利用其非线性映射和自学习的特性,实现了姿态控制参数的动态调整,增加了系统的自适应性.为验证方法的有效性,通过Matlab的Simulink模块构建了六旋翼无人机数学模型;利用S函数实现了基于反向传播(BP)算法的PIDNN控制器;将仿真结果与传统PID控制效果进行对比,结果表明:在缩短姿态调整时间与减少超调量方面,PIDNN方法控制效果优于PID方法.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)012【总页数】3页(P25-27)【关键词】六旋翼无人机;比例-积分-微分神经网络算法;姿态控制【作者】徐会丽;石明全;张霞;王晓东;井光辉【作者单位】中国科学院大学中国科学院重庆绿色智能技术研究院,重庆400714;中国科学院大学中国科学院重庆绿色智能技术研究院,重庆400714;中国科学院大学中国科学院重庆绿色智能技术研究院,重庆400714;中国科学院大学中国科学院重庆绿色智能技术研究院,重庆400714;中国科学院大学中国科学院重庆绿色智能技术研究院,重庆400714【正文语种】中文【中图分类】V249.1目前,无人机研究大多数以四旋翼无人机为对象,但与四旋翼相比,六旋翼无人机在机体空间利用、负载能力等方面更具优势。
临近空间飞行器的自适应积分滑模容错控制
Ab t c I r e o i p o e t e s c r y a d r l b e o h e r s a e v h c e ,a d p i e i — s r t n o d rt m r v h e u i n e i l ft en a p c e il s n a a t a t a v n
制 效益 损失 故 障和 漂移 故 障 , 文 提 出一 种 自适 本 应 积分 滑模 容错 控 制方 法 设 计 容错 控 制 器 , 飞 使 行器 在故 障条件 下获得 期望 的动态 性能 。
fP X 。一 [ 5 6 0 1 0 0 0 0 1 o 1 0 1 0 . 3 0 0 5 3 U 0一 E . 8 — 0 0 6 ] O 13 . 0 6
临 近 空 间 飞 行 器 的 自适 应 积 分 滑 模 容 错 控 制
林 常 青 李 学虎 ,
( 勤指挥学院 后勤指挥系, 后 北京 1 0 5 ) 0 8 8
摘
要 为提高 临近 空 间飞行器 的安全 性 和 可 靠性 , 对 飞行 器 中未 知 的 针
执行 器故 障 , 出 了一种 自适 应 积分 滑模容 错控 制方 法。设 计积分 滑模 面 , 滑 动模 提 使
b afre , r oc ) 1磅 推 力 一 4 4 、 ( 推 力 ) . 5N) D 磅 、 丁( 推力 ) 磅 、 ( 推力 ・英 尺 ) 别 为 升力 、 磅 分 阻
构 。文献 [ ] 于 自适 应 机 制在 线 估计 执 行 器 故 5基
障, 并将 其用 于 滑模 控 制 律 线性 部 分 的设 计 。文
V291 4 .
A
文 章 编 号
1 7— 1 7 2 1 ) 10 7 —5 6 30 2 (0 2 0 —0 90
六旋翼飞行器飞行原理

六旋翼飞行器飞行原理
六旋翼飞行器是一种六自由度垂直起降飞行器,相邻的两个旋翼一个顺时针转动,另一个逆时针转动,相邻两个桨一个为正桨,而另外一个为反桨。
这种设计使得飞行器自身扭矩相互抵消,从而保持飞行器的稳定。
在飞行过程中,当6个桨的升力之和等于飞行器的起飞重量时,飞行器保持悬停状态。
如果桨的升力大于飞行器本身的起飞重量,飞行器就会起飞;反之,飞行器就会下降。
通过调整飞行器6个旋翼的转速,可以实现偏航和转换飞行器姿态的目的。
以上内容仅供参考,如需更多信息,建议查阅六旋翼飞行器相关文献或咨询专业技术人员。
基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术研究

基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术研究随着无人机技术的迅速发展,六旋翼飞行器作为其中一种重要的类型,具有广泛的应用前景。
然而,六旋翼飞行器的飞行控制问题一直是研究的热点之一。
为了提高六旋翼飞行器的飞行性能和稳定性,研究人员提出了各种各样的控制方法。
本文将重点研究基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术。
动态逆控制是一种常用的控制方法,它通过将系统的非线性动力学模型转化为一个线性的模型来实现控制。
然而,由于六旋翼飞行器具有高度非线性和复杂的动力学特性,传统的动态逆控制方法往往难以满足其控制要求。
为了解决这个问题,本文提出了一种自适应动态逆控制方法。
首先,利用Pixhawk飞控板采集的传感器数据,获取六旋翼飞行器的状态信息。
然后,利用这些数据构建一个精确的非线性动力学模型,将其作为逆控制器的输入。
接着,通过自适应学习算法对逆控制器进行参数调整和优化,以实现对六旋翼飞行器的精确控制。
最后,利用实验验证了该方法的有效性。
实验结果表明,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术具有明显的优势。
与传统的动态逆控制方法相比,该方法能够更准确地模拟六旋翼飞行器的非线性动力学特性,并能够在不同工况下实现精确控制。
此外,该方法还具有较强的鲁棒性和适应性,能够有效应对飞行器系统参数变化和外部干扰。
综上所述,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术具有广泛的应用前景。
它为六旋翼飞行器的飞行控制问题提供了一种新的解决方案,能够提高飞行性能和稳定性,为无人机技术的发展做出贡献。
然而,该方法仍然存在一些问题和挑战,需要进一步的研究和改进。
相信随着技术的不断发展和创新,基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术将会得到更广泛的应用和推广。
多旋翼无人机的发展及应用免费范文
多旋翼无人机的发展及应用在2010年之前,固定翼模型飞机和模型直升机是航拍和航模运动领域的主力军。
但在近几年,因优良的操控性能,多旋翼飞行器异军突起,迅速成为航拍和航模运动领域的新星,并得到越来越多相关行业的关注。
当前,围绕多旋翼飞行器相关创意、技术、产品、应用和投资的新闻层出不穷,而随着产品的火爆,多旋翼技术的发展更是迅猛,已成为微小型无人机的主流。
多旋翼为何在沉寂数十年之后迅速走红,在未来又有哪些新的发展趋势?本文将针对这些问题进行论述。
早期的多旋翼飞行器人类总是在不断探索中进步。
18世纪后期蒙哥费尔热气球的成功升空,开创了人类飞行的新时代。
1903年世界上第一架重于空气、有动力、可控飞机的诞生,则拉开了人类近代航空发展史的序幕。
1907年,法国Breguet兄弟制造了最早的四旋翼直升机,不过它只飞了几英尺高,且飞行稳定性很差、无法控制。
1922年,美国人Dr.George de Bothezat试验了名叫Flying Octopus的四旋翼飞行器,其最大飞行高度有5米,留空时间2分45秒。
但是该飞行器的稳定性依然不好,未能满足美国军方的要求。
1956年,柯蒂斯-怀特公司为美国陆军设计了VZ-7四旋翼飞行器,并交付给军方两架原型机。
虽然这款飞机的飞行相对稳定,却依然没有达到军方对飞行高度和速度的要求,故该计划没有进一步推进。
此后50年过去了,尽管通过世界各国科学家的不断探索,四旋翼直升机在技术上有了一些进步,但还是不能满足军事方面的要求。
从20世纪初到20世纪中期,直升机的发展进入探索期,包括多旋翼在内的各种试验性机型相继问世。
最终,单旋翼带尾桨式直升机成为至今最流行的形式。
到20世纪后期,传统构型的直升机技术问题基本解决,进入了航空实用期。
其应用领域不断扩展,数量迅速增加。
而多旋翼构型则被慢慢冷落。
此后十几年,有关多旋翼直升机的技术都没有什么进展。
究其原因,主要有3个问题:首先是系统本身不稳定,导致飞行员的负担太重;其次是发动机技术不能满足要求,油门反应速度慢;第三是其运动主要依赖于螺旋桨速度的及时改变,而这种方式不宜推广到大尺寸机型上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
75
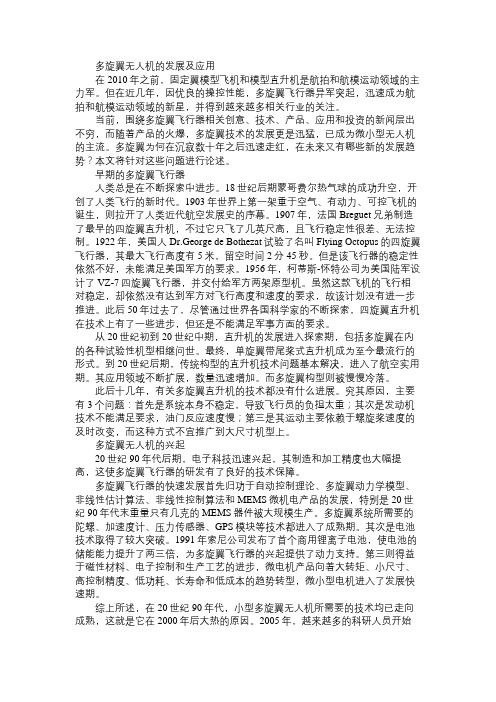
对电子调速器程序的总体架构进行说明如下:
开始
刷新PPM控 制指令 否
≥2.5ms
是 否
是否需要启 动
是
电机启动程 序
否
是否启动成 功
是 开启软件测 速
发送转速信息 和电机状态
图2 Fig. 2
电子调速器程序流程图 Program flow diagram for ESC
25
30
0 引言
近年来, 世界无人飞行器技术不断发展和完善, 尤其在多旋翼飞行器领域取得了长足的 进步。另一方面,随着电网规模的不断扩大,社会发展对输电线路安全运行的需求增大,若 35 不及时对线路进行检测并实施有效维护,极可能导致重大电网安全事故。 无人机在电力巡线方面的成功应用, 极大提高了电力巡线的工作效率, 有效地降低了电 力巡线的人工费用。 但是由于无人机电力巡检技术对飞行器的安全性和可靠性要求极高, 一 旦多旋翼飞行器在空中发生偶然性故障 (如电机卡死堵转、 旋翼翼面破损、 遥控器信号丢失) , 往往会导致对电网的次生灾害(如撞上输电杆塔、缠住输电线路)。因此,研究多旋翼飞行 40 器的容错控制,提高其应对偶然性故障的能力则具有重要意义。 本文依据电力巡线[1]这一应用背景,结合近年来国内外对容错飞行控制的理论研究,提 出一种六旋翼飞行器容错飞行控制的控制方法, 可以依据飞行器电调的反馈信息, 实时调节
中国科技论文在线
六旋翼飞行器容错飞行控制#
陈阳,王世勇,李少斌,杨成顺,杨忠**
5 (南京航空航天大学自动化学院,南京 210016) 摘要:无人机在电力巡检方面的推广,要求飞控系统更加可靠和稳定。针对六旋翼飞行器执 行机构卡死故障,本文提出一种可实现的容错控制方案。首先,设计一款具有反馈信息功能 的电子调速器, 能够实时获得执行机构的工作状态, 并将状态信息反馈给飞控计算机。 其次, 依据六旋翼的机械结构,建立数学模型,设计滑模控制律,实现六旋翼飞行器的姿态控制。 然后,当发生执行机构卡死故障时,根据电子调速器返回的状态信息,改变控制量的分配, 消除故障电机对飞行器的不良影响。最后,采用仿真软件对控制律进行模拟验证,并进行飞 行器的试验飞行。 关键词:容错控制;六旋翼飞行器;电子调速器;执行机构卡死 中图分类号:V249.122+.9
50
量出飞行器机体坐标系下三个轴上的加速度; 陀螺仪能够测量出飞行器机体坐标系下绕着三 个轴的角速度。IMU 将飞行器的加速度信号与角速度信号发给飞控计算机进行处理。 飞控计算机通过从 IMU 采集到的原始姿态信息,通过一定的滤波,运用四元数法或者 DCM 算法进行姿态解算,得到飞行器当前在惯性坐标系下的真实姿态信息。同时飞控计算 机从 RC 接收机中解算出用户或者飞控地面站发出的控制指令,结合当前的真实姿态信息,
1.2
软件程序设计
当今的电子调速器无法提供无刷电机的转速与运行状态,故需要重新设计电子调速器[3]
并建立电子调速器与飞控计算机之间的通讯。
-2-
中国科技论文在线
表1 Tab. 1 电子调速器技术参数 Technical parameters of electric speed controller 耐受电压/V 耐受电流/A 刷新率/Hz 30 40 400
基金项目:博士点基金(20113218110013); 作者简介:陈阳(1989-),男,硕士研究生,主要研究方向:多旋翼飞行器容错飞行控制 通信联系人:杨忠(1969-),男,教授,主要研究方向:无人器智能控制与管理技术、智能飞行控制与机 电综合控制、机器视觉与智能测控技术. E-mail: YangZhong@
10
15
Fault-tolerant Control of Hexa-copters
Chen Yang, Wang Shiyong, Li Shaobin, Yang Chengshun, Yang Zhong
20 (College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China) Abstract: The promotion of UAVs(Unmanned Aerial Vehicle) on the power lines inspection requires the flight control system to be more raliable and stable.This paper puts forward a realizable fault-tolerant control project against failures of Hexa-copter's actuators.Firstly,an ESC (Electronic Speed Controller)is designed which can get access to the working status in real time and send status information back to the FCC (Flight Control Computer).Secondly, design sliding mode control law to achieve attitude control after a mathematical model is built based on the Hexa-copter's mechanical structure.Then change the distribution of control to eliminate adverse affects on copters from fault motors according to the status information received from ESCs when there meets actuator stuck faults.Finally testify the control law with simulation software and conduct a testing flight of Hexa-copters. Key words: fault-tolerant control; Hexa-copters; ESCs; actuator stuck
U c TF F = MU c
(3)
115
其中,F 为六旋翼飞行器的实际输入, 表示飞行器 6 个无刷电机产生的升力。T R36 表 示实际输入量合成虚拟控制量的转换矩阵,由飞行器的机械结构决定。 M R63 表示虚拟控 制量分配为实际输入量的转换矩阵,为 T 的广义逆矩阵,满足 TM = I3 。
1.3
80
通讯协议
为了实现飞控计算机与电子调速器之间的信息沟通,必须采用一主机多从机的通讯方
式。AVR ATmega 系列单片机片内集成两线串行接口 TWI[4]模块,通过两根双向总线(包括 一根时钟线 SCL 和一根数据线 SDA),可以连接 128 个设备,具有简便、高效、快速的特 点。故在飞控计算机与电子调速器之间采用 TWI 通信协议实现状态信息的交流,如图 4 所 示:
v P T z gz g R F b v m
(1)
105
其中, P 为飞行器位置向量, v 为飞行器速度向量, TF 为飞行器总升力, R 为机体坐 标系 ob xb yb zb 与地面惯性坐标系 og xg yg zg 的转换矩阵。 m 为飞行器的质量, g 为重力加速度,
主机 从机
Start
Address+W
ACK
Data
ACK
...
ACK
Restart
Address+R
ACK
Data
NACK
...
NACK
Stop
图4 Fig. 4
TWI 通信流程
Communication procedure for TWI protocol
100
2 容错飞行控制
2.1 模型建模
由文献[5]可以得到六旋翼飞行器的运动学模型为:
zg 、 zb 分别为 og xg yg z g 和 ob xb yb zb 单位向量。
WΩ ξ JΩ Ω JΩ LU c
(2)
110
其中, ξ 表示飞行器的欧拉角, Ω 为飞行器绕质心的角速度向量, J 为转动惯量矩阵。 W 为绕机体轴角速率与欧拉角速率的转换矩阵。 L 为相应滚转、俯仰、偏航通道的等效力 臂,根据不同机型结构, L 阵的取值不同。 U c 为六旋翼飞行器的虚拟控制量,表示滚转、 俯仰、偏航通道的等效力。
主机 从机
飞 控 计 算 机
SDA SCL
电 子 调 速 器
1
电 子 调 速 器
2
电 子 调 速 器
n
85
图 3 TWI 协议连接示意图 Fig. 3 Dtion
-3-
中国科技论文在线
飞控计算机与多个电子调速器之间的通信流程如图 5 所示。 飞控计算器作为主机先控制 SDA 总线发出 Start 命令,传输开始。主机先将需要查询状态信息的从机地址进行广播,只 90 有符合相应地址的电子调速器作为从机响应,并返回 ACK 信号。主机接收到 ACK 信号后, 开始传输相应的查询命令,一旦从机接收到相应的查询命令,则返回 ACK 信号。主机发送 从机接收这一过程结束。 主机控制 SDA 总线发出 Restart 命令, 开始从机发送主机接收过程。 主机将需要读取状态信息的从机地址进行广播, 相应地址的电子调速器作为从机响应, 返回 ACK 信号。相应的从机将状态信息发送给主机,主机接收到命令之后返回 NACK 信号。当 95 从机把主机所查询的所有状态信息发送给主机后,主机控制 SDA 总线发出 Stop 命令,完成 了一次查询过程。