空间定位几种常用的空间定位技术
空间定位-几种常用的空间定位技术
混合定位技术的组成
全球定位系统(GPS)
无线局球的 优点。
利用无线信号覆盖范围内的网络接入点(AP) 进行定位,适用于室内环境。
蓝牙(Bluetooth)
包括一个主控站、一个数据注入站 和若干监测站。
用户部分
包括GPS接收机和数据处理软件等。
GPS的优缺点
优点
覆盖全球、实时性强、定位精度 高、抗干扰能力强等。
缺点
受环境影响较大,如建筑物、山 体等遮挡物可能影响信号接收; 同时需要一定的时间进行初始化 ,不能实现快速定位。
02
惯性导航系统
惯性导航系统的工作原理
THANKS FOR WATCHING
感谢您的观看
惯性导航系统通过测量载体在运动过程中的加速度和角速度,经过积分运算得到速 度、位置和姿态信息。
载体运动过程中,加速度计测量载体的线加速度,陀螺仪测量载体的角速度,通过 积分运算得到速度和位置信息。
惯性导航系统不需要外部信号源,可以在任何环境下独立工作,因此具有较高的自 主性。
惯性导航系统的组成
惯性测量单元
其他辅助定位技术
通过蓝牙信号传输进行定位,适用于短距 离、小范围的定位需求。
如惯性传感器、磁场传感器等,用于辅助 和补充其他定位技术,提高定位精度和稳 定性。
混合定位技术的优缺点
优点
混合定位技术结合了多种定位技术的优点,提高了定位精度 和可靠性,同时可以满足不同场景下的定位需求。
缺点
混合定位系统实现较为复杂,需要处理不同定位技术的数据 融合和互补问题;同时,不同定位技术的覆盖范围和精度可 能存在差异,需要合理配置和优化。
空间定位几种常用的空间定位技术

△t3为信号 传播时间改正 ,从激光脉冲离开测距仪至到达卫星间的时间 , △t3=S/c
3)大气延迟改正
4)卫星上的反射棱镜偏心改正
5)潮汐改正
h
12
五、SLR的用途现状及前景
1、激光测卫站
1)中国已经建立的武汉、上海、长春、北京和昆明等5个激光测卫站。 2)流动激光测卫站:乌鲁木齐,拉萨
长春
TROS, Urumqi, China
h
5
§4.3、激光测卫和激光测月
一、激光测卫(SLR) 2、原理(续) D=C.⊿t/2+ ⊿D ⊿D为测距改正数
激光测距 仪
带反射棱镜的激光 卫星
h
6
§4.3、激光测卫和激光测月
二、激光测距卫星
1、激光测距专用卫星 Lageos卫星 Starlette卫星
Starlette
h
7
§4.3、激光测卫和激光测月
背景的噪声,从而大大提高信噪比。 ⑶激光的发散角极小,在很远的距离上光能量仍能集中在一个很
小的范围内,有的激光测距系统发散角只有2″,在月球表面上 光斑直径也只有4km。
h
4
§4.3、激光测卫和激光测月
一、激光测卫测距原理
2、原理
用安装在地面测站的激光测距仪向安 装了后向反射棱镜的激光卫星发射激光脉 冲信号,该信号被棱镜反射后返回测站, 精确测定信号的往返传播时间,进而求出 仪器到卫星质心间的距离的方法和技术称 为卫星激光测距或激光测卫( SLR:Satellite Laser Ranging) 。目前的 测距精度可达1cm左右
三、人卫激光测距仪 1 激光仪分类 1)按激光类型来分 脉冲式 相位式激光测距仪:是用无线电波段的频
带你玩转VR虚拟现实章节测试题库及答案
带你玩转VR虚拟现实章节测试题库及答案带你玩转VR虚拟现实章节测试题库及答案第一章测试1、虚拟现实(Virtual Reality)它是用计算机营造出一种虚拟的世界,让你感觉它就像是真的一样,下面虚拟现实名称错误的是( )A、VRB、灵镜技术C、虚幻镜像D、人工环境答案:C2、虚拟现实将对( )产生深远影响A、人类生活B、文化教育C、认知D、科学答案:ABCD3、整个VR产业生态系统涉及到( )。
A、头盔设备B、交互设备C、开发工具D、内容分发平台答案:ABCD4、VR在未来将会是一个巨大的市场,将辐射各个行业,覆盖( ) 等多个方向。
A、软件B、硬件C、平台D、项目孵化答案:ABCD5、下面哪一项不是虚拟现实的特征( )A、引用性B、沉浸性C、交互性D、构想性答案:A6、虚拟现实系统需要具备人体的感官特性,其中( )是虚拟现实最重要的感知接口。
B、视觉C、嗅觉D、触觉答案:B7、到了20世纪30年代,斯坦利?G?温鲍姆(Stanley G. Weinbaum)的科幻小说《皮格马利翁的眼镜》,这是被认为探讨虚拟现实的第一部科幻作品,简短的故事中详细地描述了佩戴者可以通过( )来体验一个虚构的世界。
A、嗅觉、触觉和全息护目镜B、听觉、触觉和全息护目镜C、听觉、视觉和全息护目镜D、嗅觉、视觉和全息护目镜答案:A8、发明家莫顿海利西成功造出了一台能够正常运转的3D视频机器。
它能让人沉浸于虚拟摩托车上的骑行体验,感受声响、风吹、震动和布鲁克林马路的味道,他给它起名为( )。
A、3D视频机B、全传感仿真器C、头戴式立体显示器D、头部位置跟踪系统9、纵观VR的发展史,基本上可以分为( )个阶段.A、1B、2C、3D、4答案:D10、( )发现了人类之所以能洞察立体空间,主要是由左右眼所看到的图像不同而产生的,这种现象被叫做双眼视差。
在19世纪三四十年代,有科学家利用双目视差原理发明出了可以看出立体画面的立体镜。
虚拟现实技术考试题及答案
虚拟现实技术试题(一)1、虚拟现实是一种高端人机接口,包括通过视觉、听觉、触觉、嗅觉和味觉等多种感觉通道的实时模拟和实时交互。
2、虚拟现实与通常CAD系统所产生的模型以及传统的三维动画是不一样的。
3、虚拟现实技术应该具备的三个特征:Immersion(沉浸) Interaction(交互) Imagination(想象)4、一个典型的虚拟现实系统的组成主要由头盔显示设备\多传感器组\力反馈装置5、从虚拟现实技术的相关概念可以看出,虚拟现实技术在人机交互方面有了很大的改进。
常被称之为“基于自然的人机界面”计算机综合技术,是一个发展前景非常广阔的新技术。
6、根据虚拟现实对“沉浸性”程度和交互程度的不同,可把虚拟现实系统划分为四种典型类型沉浸式\桌面式\增强式\分布式。
7、有关虚拟现实的输入设备主要分为两类。
三维位置跟踪器8、在虚拟现实系统的输入设部分,基于自然交互设备主要有力反馈设备\数据手套\三维鼠标.9、三维定位跟踪设备是虚拟现实系统中关键设备之一,一般要跟踪参与对象的宽度、高度、深度、俯仰角(pitch)、转动角(yaw)和偏转角(roll),我们称为6自由度(6DOF)。
10、空间位置跟踪技术有多种,常见的跟踪系统有机械跟踪器\电磁跟踪器\超声波跟踪器\惯性跟踪器\光学跟踪器。
11、所谓力反馈,是运用先进的技术手段将虚拟物体的空间无能运动转变成物理设备的机械运动,使用户能够体验到真实的力度感和方向感,从而提供一个崭新的人机交互界面。
该项技术最早应用于尖端医学和军事领域。
12、立体显示技术是虚拟现实系统的一种极为重要的支撑技术。
要实现立体的显示。
现已有多种方法与手段进行实现。
主要有互补色\偏振光\时分式\光栅式\真三维显示 .12、正是由于人类两眼的视差,使人的大脑能将两眼所得到的细微差别的图像进行融合,从而在大脑中产生有空间感的立体物体视觉。
13、HMD(Head_Mounted_Display),头盔式显示器,主要组成是显示元件\ 光学系统14、洞穴式立体显示装置(CAVE Computer Automatic Virtual Enviroment)系统是一套基于高端计算机的多面式的房间式立体投影解决方案,CAVE主要组成由高性能图形工作站\投影设备\跟踪系统\声音系统。
VR设备中常见的五大动作捕捉及空间定位技术对比

VR设备中常见的五大动作捕捉及空间定位技术对比在目前的消费级VR设备中,除了三大(HTC vive、Oculus rift、PS VR)头显外,大部分的VR头显都不具备配套的体感交互(需要第三方设备),而正因为缺少了体感交互,使得这些设备未能构成完善的虚拟现实体验。
支持体感交互的VR设备能有效降低晕动症的发生,并大大提高沉浸感,其中最关键就是可以让你的身体跟虚拟世界中的各种场景互动。
在体感交互技术中又可以细分出各种类别及产品,比如:体感座椅、跑步机、体感衣服、空间定位技术、动作捕捉技术等。
下面主要来聊聊关于VR目前市面上常见的动作捕捉及空间定位技术。
1.激光定位技术基本原理就是在空间内安装数个可发射激光的装置,对空间发射横竖两个方向扫射的激光,被定位的物体上放置了多个激光感应接收器,通过计算两束光线到达定位物体的角度差,从而得到物体的三维坐标,物体在移动时三维坐标也会跟着变化,便得到了动作信息,完成动作的捕捉。
代表:HTC Vive - Lighthouse定位技术HTC Vive的Lighthouse定位技术就是靠激光和光敏传感器来确定运动物体的位置,通过在空间对角线上安装两个高大概2米的灯塔,灯塔每秒能发出6次激光束,内有两个扫描模块,分别在水平和垂直方向轮流对空间发射激光扫描定位空间。
HTC Vive的头显和两个手柄上安装有多达70个的光敏传感器,其通过计算接收激光的时间来得到传感器位置相对于激光发射器的准确位置,利用头显和手柄上不同位置的多个光敏传感器从而得出头显/手柄的位置及方向。
优缺点激光定位技术的优势在于相对其他定位技术来说成本较低,定位精度高,不会因为遮挡而无法定位,宽容度高,也避免了复杂的程序运算,所以反应速度极快,几乎无延迟,同时可支持多个目标定位,可移动范围广。
不足的是,其利用机械方式来控制激光扫描,稳定性和耐用性较差,比如在使用HTC Vive 时,如果灯塔抖动严重,可能会导致无法定位,随着使用时间的加长,机械结构磨损,也会导致定位失灵等故障。
CORS相关定位技术

浅谈CORS相关定位技术陈允约摘要:作为卫星定位技术、计算机网络技术、数字通讯技术等高新科技多方位、深度结晶的产物,CORS系统已成为城市GPS应用的热点之一,它在城市测量中的作用也越来越重要。
本文主要讨论的CORS系统的相关定位技术,并对网络RTK技术作重点阐述。
关键词:CORS;网络RTK;VRS1 绪论1.1 引言GPS技术是一种空间定位技术,它的发展过程包括定位精度逐渐提高、应用范围逐渐广泛和服务系统逐渐完善,具有标准定位服务(SPS)、精密定位服务(PPS)、实时动态定位技术(RTK)、精密单点定位技术(PPP)等多种应用形式。
其中,CORS连续运行参考站系统作为GPS发展的一个重要方向,是一个集GPS技术、计算机技术和网路技术于一身,可以作为一个区域的能满足多层次、多用途的空间数据基础设施。
CORS系统的定义CORS是网络技术与GNSS(Global Navigation Satellite System)定位技术、现代大地测量、地球动力学交叉融合的产物,并组合成网络,是一种提供移动定位、动态连续的空间参考框架和地球动力学参数等服务的信息系统;是动态地、快速地、高精度地获取空间数据和地理特征的现代信息基础设施。
该系统通过建立覆盖一定区域的一个或多个固定的连续运行的GNSS参考站,利用计算机网络技术,实时或准实时地根据用户需求提供准确的、多样的数据,包括不同类型的GNSS观测值(载波相位、伪距等),对流层、电离层等各种GNSS误差改正数、状态信息以及授时等其他用户需要的信息。
1.3CORS系统的组成典型的CORS系统是一个分布式网络系统,通常由五个子系统组成:连续运行参考站子系统(Reference Station Sub System, RSS);系统控制与数据处理中心(System Monitor and Control Center, SMC);数据通讯子系统(Data Communication Sub-System, DCS);)用户服务中心(User Servings Sub-System,USS);用户应用子系统(User Application Sub-System,UAS)。
如何设计和实现增强现实应用的空间定位和3D建模功能
如何设计和实现增强现实应用的空间定位和3D建模功能增强现实应用的空间定位和3D建模功能在近年来得到了广泛的关注和应用。
随着技术的发展,人们对于现实场景与虚拟世界的融合有了更高的期望。
本文将从设计和实现的角度详细探讨如何利用增强现实技术进行空间定位和3D建模。
一、空间定位功能的设计与实现空间定位是增强现实应用中的基础功能之一,它能够使用户在现实世界中准确地定位虚拟对象。
下面介绍两种常用的空间定位技术:视觉标记和深度感知。
1. 视觉标记视觉标记是一种通过扫描特定二维码或标记,实现空间定位的技术。
这些标记可以是特定形状、颜色或者图案的二维码,相机通过拍摄标记并对其进行图像处理,从而确定用户所在的空间位置。
在设计视觉标记空间定位功能时,需要考虑以下几个关键问题:- 标记设计:选择合适的标记形状、颜色和图案,以确保相机能够准确地检测到标记并进行识别。
- 标记识别算法:开发出高效准确的算法,使相机能够快速地检测和识别标记,并获得其空间位置信息。
- 坐标转换:将相机坐标系与标记坐标系进行转换,得到相对于标记的空间位置信息,以便正确定位虚拟对象。
2. 深度感知深度感知技术利用摄像头和特定的传感器来获取用户在现实世界中的深度信息,以实现空间定位。
最常见的深度感知技术是通过结构光或时间飞行原理实现的,例如 Microsoft Kinect。
在设计深度感知空间定位功能时,需要考虑以下几个关键问题:- 传感器选择:根据应用场景的需求,选取合适的深度感知传感器,例如结构光传感器或时间飞行传感器。
- 深度图像处理:采集到的深度图像需要进行处理,提取用户的空间位置信息,并与虚拟对象进行精确对齐。
- 算法优化:为了提高深度感知的准确性和实时性,在深度图像处理的过程中需要研究并优化相关算法。
二、3D建模功能的设计与实现3D建模功能是增强现实应用中的重要组成部分,它能够将虚拟对象与现实场景进行精确对齐,并呈现逼真的虚拟体验。
下面介绍两种常用的3D建模技术:SLAM和云点云重建。
UWB简介及其定位方法
UWB简介及其定位方法1前言本文阐述有关UWB的简介及其定位的方案,定位方法介绍了TOA、AOA/DOA、TDOA、RSSI这几种定位方法。
2概述随着现在无线技术的发展,无线室内定位技术也得到了飞速的发展,现在常用的室内无线定位技术就有很多种,包括了基于WiFi的定位、蓝牙定位、小基站定位、LED可见光定位、超宽带定位、RFID、惯性导航、地磁定位、伪卫星等多种室内定位技术。
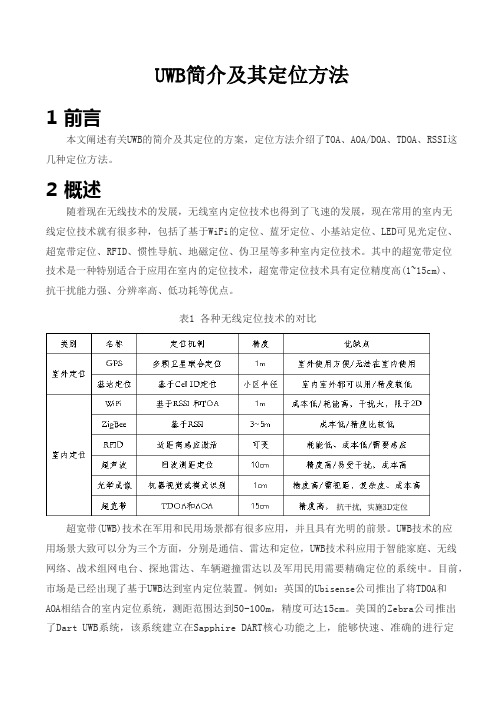
其中的超宽带定位技术是一种特别适合于应用在室内的定位技术,超宽带定位技术具有定位精度高(1~15cm)、抗干扰能力强、分辨率高、低功耗等优点。
表1 各种无线定位技术的对比超宽带(UWB)技术在军用和民用场景都有很多应用,并且具有光明的前景。
UWB技术的应用场景大致可以分为三个方面,分别是通信、雷达和定位,UWB技术科应用于智能家庭、无线网络、战术组网电台、探地雷达、车辆避撞雷达以及军用民用需要精确定位的系统中。
目前,市场是已经出现了基于UWB达到室内定位装置。
例如:英国的Ubisense公司推出了将TDOA和AOA相结合的室内定位系统,测距范围达到50-100m,精度可达15cm。
美国的Zebra公司推出了Dart UWB系统,该系统建立在Sapphire DART核心功能之上,能够快速、准确的进行定位,精度达到30cm,测距范围达到100m。
根据是否需要测量距离,无线定位方法分成测距定位和非测距定位两类。
从测距方法来看,以RSSI为主,也有使用TOA、TDOA、AOA/DOA以及多种测距手段联合的系统。
3UWB技术3.1UWB国内研究现状我国对于UWB技术的研究相对较。
2001年,第一次将超宽带技作为无线通信的共性技术与创新技术的研究内容列入国家终点研究课题,才开始对UWB技术进行研究。
在国家科研项目的支持和鼓励下,我国的不少高校在UWB技术上取得了积极的进展,对UWB天线的设计、UWB信号的发送、UWB定位算法以及多种定位方式融合进行了研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章、几种常用的空间定位技术(2)
B A
S2 S1 B
A
S1
S2
S3 S4
B
A
.
1
第四章、几种常用的空间定位技术(2)
§4.1、甚长基线干涉测量 §4.2、人卫摄影观测 §4.3、激光测卫和激光测月 §4.4、多普勒定位(Transit,DORIS) §4.5、卫星测高
.
2
§4.3、激光测卫和激光测月
t=φ/ω,
D=1/2 ct=1/2 c·φ/ω
=c/(4πf) (Nπ+Δφ)=c/4f
(N+ΔN)
.
9
§4.3、激光测卫和激光测月
三、人卫激光测距仪 1 激光仪分类(续) 2)根据其构造及精度大体可以分为三
代 • 第一代
脉冲宽度在10~40ns,测距精度 约为1—6m。多数采用带调Q开关的 红宝石激光器。 • 第二代:
.
25
3、激光测月的激光观测站
• 在光学谐振腔内沿腔轴方向传播的光 受安置在两端的反射镜反射而往返传 播,在此过程中不断引起其他原子的 受激跃迁,产生同频率的光子,使光 迅速放大。
• 与腔轴不平行的光则在往返几次后逸 出腔外,从而形成方向性极好的激光。
.
3
§4.3、激光测卫和激光测月
• 激光具有下列特点 ⑴高功率激光器的输出功率可达GW级。 ⑵激光的谱线很窄,便于在接收系统中用窄带滤
.
14
美国:Mcdonald
德国:GFZ
.
15
2、用途
1)确定地心坐标, 绝对定位精度很高。
2)定轨
3)测定极移、地球 自转、板块运动、 地壳形变等
4)确定地球重力场
.
16
§4.3、激光测卫和激光测月
六、激光测月(LLR)
Lunar Laser Ranging
1、原理
用大功率激光测距
仪向安置在月球表面上
脉冲宽度2~5ns,测距精度为 30~100cm,多数采用了脉冲分析法 第三代:
脉冲宽度为0.1~0.2ns,测距精度 为1~3cm,多数采用锁模Nd:YAG 激光器 。能在计算机控制下实现对 卫星的自动跟踪和单光子检测技术。
.Байду номын сангаас
10
§4.3、激光测卫和激光测月
三、人卫激光测距仪 2.人卫激光测距仪的结构
一、激光测距的基本原理
1.激光
激光LASER(Light Amplication by Stimulated Emission of Radiation) 是指光的受激辐射以实现光放大。
• 当激光物质处于粒子数反转分布状态 时,由自发辐射而产生的光子将引起 其它原子受激跃迁,从而使光得到受 激放大。
8
§4.3、激光测卫和激光测月
三、人卫激光测距仪
1 激光仪分类
1)按激光类型来分
• 脉冲式
• 相位式激光测距仪:是用无线 电波段的频率,对激光束进行 幅度调制并测定调制光往返测 线一次所产生的相位延迟,再 根据调制光的波长,换算此相 位延迟所代表的距离。即用间 接方法测定出光经往返测线所 需的时间,如右下图所示。
.
22
Lunakhod 2
.
23
3、激光测月的激光观测站
• 美国Texas州的McDonald 天文台
• 美国Hawaii州的Haleakala 天文台
• 法国的Grasse观测站 • 澳大利亚Orrorral站 • 德国的Wettzell观测站
.
24
3、激光测月的激光观测站
• 美国Texas州的McDonald天文台
1、激光测卫站
1)中国已经建立的武汉、上海、长春、北京和昆明 等5个激光测卫站。
2)流动激光测卫站:乌鲁木齐,拉萨
长春
TROS, Urumqi, China
北京
武汉
上海
TROS, Lhasa, Tibet
昆明
.
13
1、激光测卫站
2)国际上
目前在工作的SLR站如图所示,图中红色三角形 测站表示正在工作的测站,大约有44个站。
可达1cm左右
.
5
§4.3、激光测卫和激光测月
一、激光测卫(SLR) 2、原理(续) D=C.⊿t/2+ ⊿D ⊿D为测距改正数
激光测 距仪
带反射棱镜的 激光卫星
.
6
§4.3、激光测卫和激光测月
二、激光测距卫星
1、激光测距专用卫星 • Lageos卫星 • Starlette卫星
Starlette
△t1为工作钟与标准时间之间的差异;
△t2为工作钟取样时刻和激光脉冲信号的发射时刻之间的 差异,也称为触发延迟改正
△t3为信号传播时间改正,从激光脉冲离开测距仪至到达 卫星间的时间,△t3=S/c
3)大气延迟改正
4)卫星上的反射棱镜偏心改正
5)潮汐改正
6)相对论改正
.
12
五、SLR的用途现状及前景
的反射棱镜发射激光脉
冲信号,测定信号的往
返传播时间,进而求出
仪器到反射棱镜之间距
离的方法和技术称为激
光测月。
.
17
§4.3、激光测卫和激光测月
2、月球表面上的反射棱镜
L1 A15 L2 A11 A14
.
18
Apollo-11
.
19
Apollo-14
.
20
Apollo-15
.
21
Lunakhod 1
整个测距仪是由: (1)激光器 (2)望远镜 (3)光电头 (4)脉冲测量系统 (5)时频系统 (6)伺服系统 (7)计算机等部分组成
的
.
11
§4.3、激光测卫和激光测月
四、激光测距观测值误差改正
1)测距仪仪器常数改正
– 不同仪器之间的常数改正
– 地面大气延迟改正
2)观测时间改正△t= △t1+ △t2+ △t3
光片来消除天空背景的噪声,从而大大提高信 噪比。 ⑶激光的发散角极小,在很远的距离上光能量仍 能集中在一个很小的范围内,有的激光测距系 统发散角只有2″,在月球表面上光斑直径也只 有4km。
.
4
§4.3、激光测卫和激光测月
一、激光测卫测距原理
2、原理
用安装在地面测站的激光测 距仪向安装了后向反射棱镜的 激光卫星发射激光脉冲信号, 该信号被棱镜反射后返回测站, 精确测定信号的往返传播时间, 进而求出仪器到卫星质心间的 距离的方法和技术称为卫星激 光测距或激光测卫 (SLR:Satellite Laser Ranging) 。目前的测距精度
.
7
§4.3、激光测卫和激光测月
二、激光测距卫星(续) 2、非专用卫星 • ATS-6 • 海洋卫星Seasat-1 • 海洋地形试验卫星
Topex/Poseidon • 部分GPS卫星等。
这些卫星之所以安 装激光反射棱镜,主要 是把激光测距也作为一 种定轨的手段。
.
ATS-6
Tope x
Seasat-1 GPS卫星