球杆系统课程设计
自制球杆系统课程设计
综合课程设计:自制球杆控制系统院(系、部):信息工程学院姓名:学号:年级:三年级专业:测控技术与仪器任课教师:摘要:球杆系统是控制理论研究中最为著名的实验设备之一,许多学者在控制理论中的研究都通过球杆系统进行验证。
球杆系统受到如此广泛的应用,是因为它有一些很重要的性质,例如其非线性特性、开环不稳定特性等,许多经典的或者现代的设计方法都可以应用到球杆系统中,它成为检验控制理论的理想的实验装置。
对球杆系统进行控制的方法多种多样,本文的目的就是设计一种PID控制器,对球杆系统进行控制。
本次课程设计以实验室现有的典型球杆控制装置为原型平台,设计开发一套相应的典型球杆控制系统装置。
我们的单片机选用arduino328,传感器选用自制红外传感器,电机选用SG5010。
根据左右两侧红外线传感器(不同距离的障碍物反射回来的红外线强弱不同得到的电压值不同)测得小球实际位置后传给单片机,单片机控制电机转动从而带动球杆上下运动,改变小球位置,减小误差使小球逐渐稳定于指定位置。
在此次课程设计中我们以自制球杆系统为研究对象,建立它的系统模型,采用时域和频域设计方法,设计PID或其他控制器,完成它的调试和控制。
关键字:自制球杆系统、红外线传感器、线性化、系统建模、PID控制、Arduino328Abstract: The ball and beam system is one of the most famous theoretical research laboratory equipment, research in control theory, many scholars are verified by the club system. Cue systems are so widely used, because it has some very important properties, such as its non-linear characteristics, the open-loop unstable characteristics, many classic or modern design methods can be applied to the club system, it an ideal experimental device inspection and control theory. Method for controlling a variety of club system, the purpose of this paper is to design a PID controller to control the system for the club.we choose arduino328 single-chip computer, sensor chooses homemade infrared sensor,motor selection of SG5010 steering gear. Infrared sensors (different distance barriers reflected infrared weak voltage value of different) measured ball after the actual position to the single-chip microcomputer, single chip microcomputer control motor rotation to drive the club moves up and down, change the ball position, gradually reduce the stable error ball in the specified location. In the course design with our homemade cue system as the research object, its system model is set up, using time domain and frequency domain design method, design PID or other controllers, to complete its commissioning and control.Keywords: Homemade system、Infrared sensor、linearization、System modeling、PIDcontrol、Arduino328目录引言------------------------------------------------------------------------------------------------------2一、整体方案设计1.1需求分析----------------------------------------------------------------------------------------5 1.2目标设定----------------------------------------------------------------------------------------5 1.3概念设计----------------------------------------------------------------------------------------51.4整体开发方案设计及评估-------------------------------------------------------------------5二、系统设计2.1功能分析-----------------------------------------------------------------------------------------52.1.1产品图纸----------------------------------------------------------------------------------62.1.2原料清单----------------------------------------------------------------------------------62.1.3设计原型----------------------------------------------------------------------------------72.1.4产品分析----------------------------------------------------------------------------------7 2.2机械系统设计2.2.1机械系统数学模型建立---------------------------------------------------------------72.2.2传感器检测及其接口设计------------------------------------------------------------82.2.3控制电动机------------------------------------------------------------------------------92.2.4控制器及其接口设计------------------------------------------------------------------10三、理论分析3.1控制系统建模----------------------------------------------------------------------------------10 3.2时域和频域分析-------------------------------------------------------------------------------11 3.3设计PID控制器-------------------------------------------------------------------------------13 3.3.1直接加入PID控制-------------------------------------------------------------------------153.3.2线性化后的PID控制----------------------------------------------------------------------15四、元器件、设备选型4.1单片机-------------------------------------------------------------------------------------------174.1.1单片机型号参数及性能分析----------------------------------------------------------174.1.2单片机购买渠道-------------------------------------------------------------------------184.1.3优劣性分析-------------------------------------------------------------------------------18 4.2控制电机----------------------------------------------------------------------------------------184.2.1控制电机型号参数及性能分析-------------------------------------------------------184.2.2控制电机购买渠道----------------------------------------------------------------------194.2.3改进方案----------------------------------------------------------------------------------19 4.3传感器-------------------------------------------------------------------------------------------194.3.1红外线传感器购买渠道----------------------------------------------------------------194.3.2优劣性分析-------------------------------------------------------------------------------194.3.3改进方案----------------------------------------------------------------------------------19五、加工制作5.1加工图纸----------------------------------------------------------------------------------------19 5.2材料选择----------------------------------------------------------------------------------------205.3加工方案----------------------------------------------------------------------------------------20六、安装调试6.1实验过程----------------------------------------------------------------------------------------206.2实验数据分析----------------------------------------------------------------------------------20七、经济性分析---------------------------------------------------------------------------------------207.1市场分析----------------------------------------------------------------------------------------20 7.2市场运作----------------------------------------------------------------------------------------217.2.1自制球杆系统优点----------------------------------------------------------------------217.2.2市场营销方案----------------------------------------------------------------------------21 7.3成本分析----------------------------------------------------------------------------------------217.3.1成本分类及估算-------------------------------------------------------------------------217.3.2劳动力成本估算-------------------------------------------------------------------------217.3.3产品定价----------------------------------------------------------------------------------21八、结论------------------------------------------------------------------------------------------------21 致谢------------------------------------------------------------------------------------------------------22参考文献------------------------------------------------------------------------------------------------22引言球杆系统(Ball & Beam )是为自动控制原理等基础控制课程的教学实验而设计的实验设备。
基于球杆的控制系统分 析与设计实验教程
实验一 实验二 实验三 实验四 实验五 小 结
第三章
球杆控制系统分析设计提高 ................................. 32
实验一 实验二 实验三 实验四 实验五
1
前
言
自动控制理论是自动控制及相关专业的必修专业基础课, 自动控制理论实验是学习和掌 握控制系统分析和设计方法最有效的途径之一。 机电控制系统分析设计是机电类相关专业学生的培养目标, 如何从机电系统总体设计的 角度出发,以性能指标为依据,深入分析机械结构、电气部分、控制算法对机电系统性能指 标影响的情况,是机电类控制系统分析设计的主要内容之一。 控制系统分析的标准是仿真与实际测试的性能指标满足误差范围。 控制系统设计的标准是通过分析机械结构、 电气部分的特性, 选择控制算法达到系统最 好的性能指标。并为改进机械、电气、控制算法提出依据。 球杆系统是典型的单输入单输出的机电类控制系统, 通过改变平衡杆与水平方向的夹角, 而控制平衡杆上的滚动的小球位置。球杆系统实验现象直观、明显,不仅可以表现出很多控 制系统的基本概念如:跟随特性,鲁棒性等,而且很吸引学生注意力,是不可多得的实验平 台。 本实验教程根据球杆系统的数学模型, 以性能指标为依据, 通过比较控制系统仿真与实 现的现象不同,分析影响球杆控制系统性能指标的机械、电气因素,并改进以提高系统性能 指标。使学生了解和掌握机电控制系统分析、设计的基本原理和基本方法。 通过若干次的反复实践, 学生可以深入理解机电类控制系统分析、 设计的基本过程和概 念。 本教程不仅是一个关于自动控制的实验教程, 还是一个机电系统设计的实验教程, 主要 包含以下内容: 第一章,介绍机电控制系统的几个基本概念理解,在长期的教学中,控制系统概念主要 是不理解因而不会用。这几个概念会在后面的设计中用到。 第二章,球杆控制系统分析设计入门,从推导简化模型入手,设计控制器。通过分析实 际测试的性能指标和仿真的不同,引申出影响系统性能的因素。 第三章,通过深入分析影响球杆控制系统性能的因素,加入到仿真模型中,在和实际控 制系统模型比较后,设计出性能优异的控制系统。 本实验教程实验项目包括:系统建模和稳定性分析、PID 校正、根轨迹校正、频域法校 正、状态反馈共五个实验。 其中综合性实验 1 个,为 PID 校正;设计性实验 3 个,为根轨迹校正、频域法校正、 状态反馈;验证性实验 1 个,为系统建模和稳定性分析。综合性、设计性试验占全部实验的 比例为 80%。 经典控制理论实验为 4 个,系统建模和稳定性分析、PID 校正、根轨迹校正、频域法校 正。综合型设计性实验比例为 75%.现代控制理论实验为 1 个,状态反馈, 综合型设计性实 验比例为 100%。 本实验教材适用于机电类控制专业的本科学习自动控制理论应用和机电控制系统分析 设计课程,以及非机电类控制专业的研究生学习自动控制理论之用。
1球杆系统
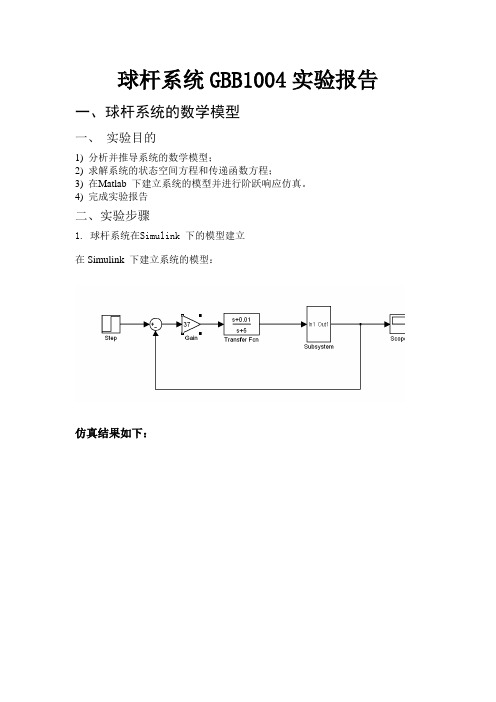
球杆系统GBB1004实验报告一、球杆系统的数学模型一、实验目的1) 分析并推导系统的数学模型;2) 求解系统的状态空间方程和传递函数方程;3) 在Matlab 下建立系统的模型并进行阶跃响应仿真。
4) 完成实验报告二、实验步骤1. 球杆系统在Simulink 下的模型建立在Simulink 下建立系统的模型:仿真结果如下:二、球杆系统的数字控制器实验报告一、实验目的学习使用根轨迹法设计一个稳定的系统,进一步理解根轨迹的基本概念和根轨迹图所代表的含义,通过实验来验证增加零、极点以及开环增益对系统性能有何影响。
二、实验步骤1、开环根轨迹实验程序:m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;K=(m*g*d)/(L*(J/R^2+m));num=[-K]; den=[1 0 0];plant=tf(num,den);rlocus(plant)运行结果:2、可以看到系统在原点有两个极点沿虚轴伸向无穷远处使用sgrid 命令可以将设计目标也显示在根轨迹上m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;K=(m*g*d)/(L*(J/R^2+m));num=[-K];den=[1 0 0];plant=tf(num,den);rlocus(plant)sgrid(0.7,1.9)axis([-5 5 -2 2])运行结果:3、超前补偿器;在上面那个程序前添加以下程序:zo=0.01;po=5;contr=tf([1 zo],[1 po])rlocus(contr*plant)sgrid(0.7,1.9)运行结果:4、现在,根轨迹的分支已经在设计目标范围内。
使用rlocfind 命令来确定系统的增益。
在m文件中加入以下几行[k,poles]=rlocfind(contr*plant)到图形显示窗口选择用十字形光标一点。
自动控制球杆系统实验指导书-2016资料
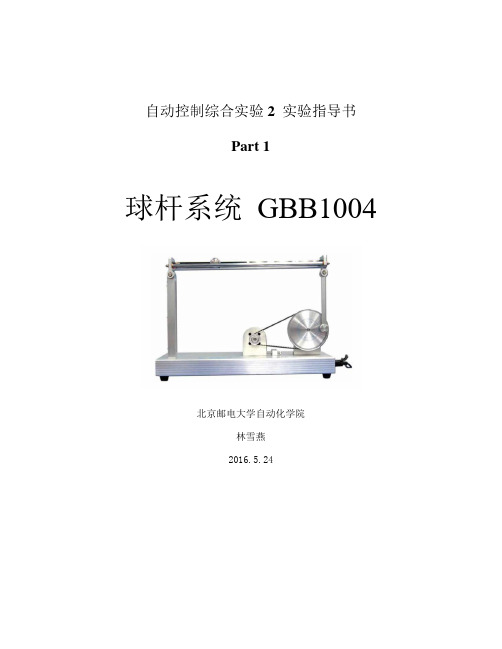
自动控制综合实验2 实验指导书Part 1球杆系统GBB1004北京邮电大学自动化学院林雪燕2016.5.24前言自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实验独立设置成一门实验课:自动控制综合实验。
自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW 等。
上学期开设的自动控制综合实验(1)主要内容为控制系统的Matlab/simulink 仿真和基于实验箱的硬件模拟,以电路系统为研究对象。
本学期开始的自动控制综合实验(2)的内容是基于典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和设计方法。
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统要完成的实验有:实验一:小球位置的数据采集处理实验二:球杆系统的PID法控制实验三:球杆系统的根轨迹法控制实验四:球杆系统的频率响应法控制倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
倒立摆系统要完成的实验有:实验五:倒立摆的数学建模及稳定性分析实验六:倒立摆的状态反馈控制实验七:不同状态下状态反馈控制效果比较实验八:倒立摆的LQR 控制同学们完成实验后,要完成相应的实验报告,并及时提交。
球杆定位控制系统实验指导书
球杆定位控制系统实验指导书实验指导书深圳市鸥鹏科技有限有限公司二○○五年十月目录目录 (2)一、球杆定位控制系统认知实验 (5)实验目的 (5)实验内容 (5)实验步骤 (5)实验报告 (7)二、系统建模分析 (8)1、机械建模分析 (8)2 电机建模分析 (8)三、球杆定位控制系统控制实验 (11)实验目的 (11)实验内容 (11)1、P控制器设计 (11)2、PD控制器设计 (12)2、PID控制器设计 (12)实验步骤 (12)实验报告 (20)四、球杆定位控制系统扩展控制实验 (21)4. 1 根轨迹算法设计 (21)4.2. 频率响应法设计 (21)前言球杆定位控制系统是为自动化,机械电子,电气工程等专业的基础控制课程教学实验而设计的实验设备。
通过对球杆系统进行分析和实验,学生可以学习对物理系统的建模和控制系统的设计,熟悉PID控制的设计和调节,以及利用别的控制理论和算法进行实验。
一、球杆定位控制系统认知实验实验目的认知球杆定位控制系统的结构和工作原理,熟悉系统的工作流程,并检验系统各通道的工作状况是否正常。
实验内容球杆定位控制系统结构如下图,有连杆机构及相应的电气驱动,传感部分组成,其工作流程为通过电机驱动,带动连杆运动,改变钢球所在滑道的倾斜角度,使钢球在重力作用下沿滑道运动。
本实验内容是要详细了解系统的结构,关键部件,并联机测试各部件工作是否正常。
实验步骤1、认真观察球杆定位控制系统,指出系统的各个部分,打开后盖,认知相关的电气控制部分及机械传动部分,并做好记录。
2、安装好后盖,将电源线,通讯线与电源箱,电脑正常连接。
3、接通电源,打开测试软件:1)在matlab下打开QGTEST.MDL进入测试界面:2)点击运行:3)设置运动位置POS,观察球杆运动情况,4)切换伺服开关,运动,停止开关,测试硬件响应5)改变运动速度,加速度及位置,观察运动情况6)打开各个示波器7)用手轻拨钢球,让钢球在滑道上缓慢滚动,观察采集到钢球的位置数据8)停止实时仿真,观察各示波器数据,并保存到相应的文件实验报告1写出球杆定位控制器通的主要组成,并描述各模块的功能与实现。
1-球杆系统建模分析

1-球杆系统建模分析-CAL-FENGHAI.-(YICAI)-Company One1《线性系统理论》课程设计报告书课题名称球杆系统姓名孟禹漆铖刘泽文孟凡强杨佐龙日期2013年2 月 25日老师陈玮1 球杆系统建模分析本章将对球杆系统进行简单的介绍,然后采用拉格朗日方程建立其数学模型,并在此基础上分析其特性。
1.1球杆系统介绍球杆系统(Ball & Beam )是由球杆执行系统、控制器和直流电源等部分组成。
该系统对控制系统设计来说是一种理想的实验模型。
正是由于系统的结构相对简单,因此比较容易理解该模型的控制过程。
球杆执行系统(如图1 所示)由一根V 型轨道和一个不锈钢球组成。
V 型槽轨道一侧为不锈钢杆,另一侧为直线位移电阻器。
当球在轨道上滚动时,通过测量不锈钢杆上输出电压可测得球在轨道上的位置。
V 型槽轨道的一端固定,而另一端则由直流电机(DC motor )的经过两级齿轮减速,再通过固定在大齿轮上的连杆带动进行上下往复运动。
V 型槽轨道与水平线的夹角可通过测量大齿轮转动角度和简单的几何计算获得。
这样,通过设计一个反馈控制系统调节直流电机的转动,就可以控制小球在轨道上的位置。
图1 球杆系统执行机构原理图1.2拉格朗日方程介绍建立一个力学体系的动力学方程所需要的独立坐标称为广义坐标,广义坐标一旦确定,体系在空间的位置状态也就可以唯一确定。
广义坐标可以是坐标变量,也可能是是角动量或其他独立变量,凡能用来表述体系的位形、运动和动力学状态的独立参量都可作为广义坐标。
广义坐标的条件是:互相独立、满足约束方程、唯一确定体系的位形式动力学状态。
拉格朗日方程方法建模可以表述为:设一个机械系统的自由度为n ,对于系统可以采用广义坐标12(,,...,)n q q q q =,12(,,...)n q q q q =来描述,记该系统的总体动能为(,)T q q ,总体势能为()V q ,系统的运动特性可以用以下的拉格朗日方程描述:d 1,2,...,d i i iL Li n t q q τ⎛⎫∂∂-== ⎪∂∂⎝⎭ (1.1)其中,方程组中方程式的数目等于质点系的自由度数,i τ为作用在第i 个广义坐标i q 方向的外部力或力矩之和。
4球杆控制系统课程设计解答
指导教师评定成绩:审定成绩:重庆邮电大学自动化学院自动控制原理课程设计报告设计题目:球杆控制系统单位(二级学院):自动化学院学生姓名:***专业:****班级:****学号:****指导教师:****设计时间:20**年*** 月重庆邮电大学自动化学院制一、设计题目:球杆控制系统设计一位置控制系统,已知:横杆长40CM,横板上全程设滑线变阻器,横板初始角度为0,小球质量为110g,半径0.015m,d=0.03m,齿轮传动比为10,球的转动惯量为0.00001kg.m.s2不计摩擦,球上有触点与变阻器及控制电路相连形成反馈,设要求系统在单位阶跃信号下:调节时间小于5秒,超调量小于20% ,求出系统地传递函数并探讨采用PID校正和频率法校正的方法,并确定校正装置。
初始位置x=0,电机及减速器的转动惯量为I=1kg.ms2,减速器传动比为10,不计所有摩擦和小球重量带来的阻力,输入设定电位器RW 的灵敏度为:±0.5V/±CM。
直流电机:励磁线圈电阻R f=20,电感L f忽略,扭矩常数Kt=1(N.M/A) 直流电机励磁电流和控制电压的关系为:u=R f *i f,转矩为:T=Kt i f ,工作原理为:电机通过减速齿轮带动横杆转动,小球在重力作用下移动并停止在设定位置。
二、设计报告正文执行系统是一个典型的四连杆机构,横杆由一根带刻度的不锈钢杆和一根直线位移传感器组成,可以绕其左边的支点旋转,通过控制横杆的角度,就可以控制小球的在横杆上的位置。
执行系统采用直流伺服电机驱动,通过控制电机轴的转角,就可以实现对横杆角度的控制。
小球的位置通过直线位移传感器采集,控制器根据位置误差计算控制量,控制电机轴的转角,从而控制横杆的角度,使小球稳定到目标位置。
球杆系统的非线性体现在驱动导轨运动的电机主轴与导轨仰角之间以及齿轮和导轨之间的传动存在多处非线性关系。
称球杆系统是不稳定系统,是因为即便导轨的仰角是固定的,小球的位置仍然是未知的。
球杆系统控制器设计及MATLAB仿真
摘要以球杆系统作为主体,系统中的小球作为被控对象,设计一个模糊控制器,控制小球在装置导轨上的运行状态,分析小球在导轨上的运行状态,以此来反映模糊控制器的控制性能。
设计首先对球杆系统组成结构及其基本原理进行分析之后,建立一个相对简化后的球杆系统模型;运用相关的模糊控制原理,建立球杆系统模糊控制规则,再对球杆系统进行模糊控制器设计。
并在MATLAB仿真环境下建立控制器的仿真模型,对球杆系统进行仿真,测试模糊控制器的控制性能。
针对球杆系统自身存在的不稳定特性,在进行仿真时加入闭环反馈控制环节,这样不但可以提高系统的稳定性,还可以提高控制的精度,相较于其他一般控制,它更具有独特优势,更符合人类思维。
球杆系统作为如今研究控制理论的经典案例,与模糊控制融合之后,能更好地表现模糊控制在自动控制方面的优良特性。
关键词:球杆系统;模糊控制;MATLAB建模ABSTRACTIn the ball and beam system as the main body, the ball as a controlled object,design a fuzzy controller , to control the ball in the guide rail device running status. Analysis the ball movement on the guide rail, in order to reflect the fuzzy controller performance. First,the design analysis the composition structure and the basic principle of the ball and beam system , then establish a relatively simplified of the ball and beam system model; using the principle of fuzzy control, to establish fuzzy control rules of the ball and beam system, design a fuzzy controller to the ball and beam system. And in the MATLAB simulation environment, establish the simulation model of the controller, simulate the club system and test the control performance of the fuzzy controller.For the ball and beam system own existence the instability characteristics, in the simulation by adding closed loop feedback control link, which can not only improve the system stability, but also can improve the control accuracy, compared with other general control, it is more unique advantages, more in line with human thinking.Club system as a classic case in study control theory, and after fusion with fuzzy control, can performance the excellent characteristics of fuzzy control in the automatic control .Key words: the ball and beam system;fuzzy control;MATLAB modeling目录1 绪论 (1)1.1 课题背景和研究意义 (1)1.1.1 课题背景 (1)1.1.2 课题的研究意义 (1)1.2 模糊控制的发展及研究状况 (2)1.2.1 模糊控制论的产生与发展 (2)1.2.2 模糊控制论的研究和现状 (3)2 球杆系统建模及仿真 (5)2.1 球杆系统介绍 (5)2.1.1 系统简述 (5)2.1.2 系统组成 (5)2.2 球杆系统建模 (6)2.2.1 球杆系统数学模型建立 (6)2.3 MATLAB建模 (7)2.3.1 MATLAB软件介绍 (7)2.3.2 球杆系统在MATLAB的模型建立 (7)3 模糊控制器设计 (13)3.1 模糊控制器概述及原理 (13)3.2 模糊控制器结构 (13)4 球杆系统的模糊控制器设计 (15)4.1 模糊控制的实现 (16)4.1.1 各个变量个论域 (16)4.1.2 隶属度划分 (16)4.1.3 模糊规则的建立 (18)4.2 模型仿真 (20)结束语 (22)参考文献 (23)致谢 (24)1 绪论1.1 课题背景和研究意义1.1.1 课题背景如今的世界已经迎来一场重要的信息革命了,而模糊理论的发展正好充分的印证了这次革命的必要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.固高球杆系统课程设计目录一、整体方案设计 (3)1.1需求 (3)1.2 设定目标 (3)二、系统设计 (4)2.1功能分析 (4)2.2设计规和约束 (5)2.3 机械系统设计 (7)2.4 传感器输出信号的数字滤波 (9)三、理论分析 (10)3.1 控制系统建模 (10)3.2 原系统稳定性分析 (10)3.2.1 原系统概述 (10)3.2.2待校正系统单位阶跃响应分析: (10)3.2.3伯德图分析 (11)3.3频率响应法设计球杆系统控制器 (13)3.3.1设计要求 (13)3.3.2相位超前控制器 (13)3.3.3相位超前-滞后控制器 (16)3.4 P/PD/PID 控制器设计 (19)3.4.1 球杆系统的P 控制器设计 (19)3.4.2 球杆系统的PD 控制器设计 (20)3.4.3 球杆系统的PID 控制器设计 (24)3.5 各种控制方法比较总结 (28)3.5.1频域校正方法的比较 (28)3.5.2 PID校正方法的比较 (29)四、元器件、设备选型 (30)4.1激光位移传感器 (30)4.2 IPM240-5E 智能伺服驱动器 (31)4.3 70W伺服电机 (31)五、加工安装调试 (33)5.1超前校正实际检验: (33)5.2 超前-滞后校正实际检验: (34)5.3 PD校正实际检验: (35)5.4 PID校正实际检验: (36)六、经济性分析 (38)6.1市场分析 (38)6.2市场运作 (38)6.3成本分析 (38)七、结论 (40)八、心得体会 (41)一、整体方案设计1.1需求球杆系统是为自动控制原理等基础控制课程的教学实验而设计的实验设备。
该系统涵盖了许多经典的和现代的设计方法。
这个系统有一个非常重要的性质——它是开环不稳定的。
不稳定系统的控制问题成了大多数控制系统需要克服的难点,有必要在实验室中研究。
但是由于绝大多数的不稳定控制系统都是非常危险的,因此成了实验室研究的主要障碍。
而球杆系统就是解决这种矛盾的最好的实验工具,它简单、安全并且具备了一个非稳定系统所具有的重要的动态特性。
1.2 设定目标球杆的控制问题就是使小球尽快地达到一个任意的设定位置,并且使之没有较大的超调量和过大的调节时间。
当小球达到期望的位置后,系统能克服随机扰动而保持在稳定的位置不变。
球杆控制系统的目的是:小球和球杆组成的系统在受到干扰后,小球处于轨道的任意的设定位置,小球将保持在该位置不变。
二、系统设计2.1功能分析(1)被控对象:球杆的被控对象为球杆和小球。
球杆通过传动杆连接在齿轮上,并可以根据齿轮的角度变化来控制球杆的倾角,进而控制小球平衡在设定的平衡位置。
通过给小球施加适当的力可以将球杆倾斜起来并最终使小球保持在平衡位置。
(2)控制装置:电机的运动通过IPM100智能伺服驱动器进行控制,IPM100是一个智能的高精度、全数字的控制器,嵌100W的驱动电路,适合于有刷和无刷电机。
基于反馈控制原理,在得到传感器信号后,对信号进行处理,然后给电机绕组施加适当的PWM电压信号,这样,一个相应的扭矩作用于电机轴,使电机开始运动,扭矩的大小决定于用户程序中的控制算法。
IPM100是一款智能的控制器,它除了板载的用于放大控制信号的驱动放大器和PWM 调制电路,还有一个全数字的DSP处理芯片,存以及其它逻辑元件,有了这些,就可以实现先进的运动控制技术和PLC的功能,它产生实时的轨迹路径,实现闭环伺服控制,执行上位机的操作命令,完成板载IO信号的处理,所有这些都依照储存器的程序指令或是主机的在线命令执行,这种嵌入式的智能控制可以提供一个实时性非常好的控制效果,即使因为PC的非实时操作系统而产生延时的情况下。
因为控制器可以独立运行,也可以采用从动模式,本手册介绍的球杆系统将采用两种模式。
IPM100安装于控制箱部,通过RS232和上位计算机进行通讯,直流电源也置于控制箱部。
2.2设计规和约束用现代控制理论中的状态反馈方法来实现球杆系统的控制,就是设法调整闭环系统的极点分布,以构成闭环稳定的球杆系统,它的局限性是显而易见的。
只要偏离平衡位置较远,系统就成了非线性系统,状态反馈就难以控制。
实际上,用线性化模型进行极点配置求得的状态反馈阵,不一定能使球杆系统稳定起来,能使球杆系统稳定起来的状态反馈阵是实际调试出来的,这个调试出来的状态反馈阵肯定满足极点配置。
这就是说,满足稳定极点配置的状态反馈阵很多,而能使球杆系统稳定起来的状态反馈阵只有很少的一个围,这个围要花大量的时间去寻找。
2.3 机械系统设计机械部分包括底座、小球、横杆、减速皮带轮、支撑部分、马达等。
如图2.2图2.4 球杆系统机械设计图选用直流伺服电机,采用齿轮箱减速机构进行减速,在输出齿轮上距齿轮圆心d(小于齿轮半径)处连接一杠杆臂Leaver Arm,此连接处螺钉不能固定太紧,杠杆臂的另一端与轨道Beam铰链,机构的另一端是一固定座,此固定座上端与轨道的左侧铰链。
如上图2.3,在一长约0.4 米的轨道上放置一不锈钢球,轨道的一侧为不锈钢杆,另一侧为直线位移传感器,当球在轨道上滚动时,通过测量不锈钢杆上输出的电压信号可获得球在轨道上的位置x 。
电机转动带动齿轮系驱动杠杆臂转动,轨道随杠杆臂的转动与水平方向也有一偏角α,球的重力分量会使它沿着轨道滚动,设计一个控制系统通过调节伺服角度θ使得不锈钢球在杆上的位置能被控制。
系统执行机构原理图如上图2.3。
图2.5 球杆系统实物简化图机械系统数学模型如下:为了便于分析我们将实物模型简化如图2.3。
实际上使小球在导轨上加速滚动的力是小球的重力在同导轨平行方向上的分力同小球受到的摩擦力的合力。
考虑小球滚动的动力学方程,小球在V 型杆上滚动的加速度:ααμsin cos g g a -= 式(2.1-1)其中μ为小球与轨道之间的摩擦系数,而α为轨道杆与水平面之间的夹角。
但在进行数学建模的过程中,我们忽略了摩擦力,因此,其基本的数学模型转换成如下方式:x m mg=αsin 式(2.1-2) 当α<<1时,将上式线性化,得到传递函数如下2)()(sg s s x =α 式(2.1-3) 其中X(s)为小球在轨道上的位置。
但是,在实际控制的过程中,杆的仰角α是由电动机的转角输出来实现的。
影响电动机转角θ和杆仰角α之间关系的主要因素就是齿轮的减速比和非线性。
因此,我们可以得到它们的关系如下:)()(s dL s αθ•= 式(2.1-4) 把式(2.1-4)式代入式(2.1-3)式,我们可以得到另一个模型: 2)()(Ls gd s s x =θ 式(2.1-5)因此,球杆系统实际上可以简化为一个二阶系统。
由建模分析我们得到球杆系统的开传递函数为:2)()(Ls gd s s x =θ 式(2.1-6)其中X(s)为小球的实际位置,θ(s)为电机转角。
2.4传感器输出信号的数字滤波在系统的输入信号中,一般都含有各种干扰信号,它们入要来自被测信号本身、传感器或者外界的干扰。
为了提高信号的可靠性,减小虚假信息的影响,可采用软件方法实现数字滤波。
数字滤波就是通过一定算法程序的计算或判断来剔除或减少干扰信号成分,提高信噪比。
它与硬件RC滤波器相比具有以下优点:(1) 数字滤波是用软件程序实现的,不需要增加任何硬件设备,也不存在阻抗匹配问题,可以多个通道共用,不但节约投资,还可提高可靠性、稳定性。
(2) 可以对频率很低的信号实现滤波,而模拟RC滤波器由于受电容容量的限制,频率不可能太低。
(3) 灵活性好,可以用不同的滤波程序实现不同的滤波方法,或改变滤波器的参数。
正因为用软件实现数字滤波具有上述特点,所以在机电一体化测控系统中得到了越来越广泛的应用。
三、理论分析3.1 控制系统建模由以上理论分析可得系统的方块图如图3.1图3.1 系统方块图 其中Xd 为输入的阶跃信号,θ为齿轮的转角,X 为输出的信号。
在我们使用的球杆系统中,建模部分主要包括对电机执行机构的建模和对传动杆和球杆的建模,机械系统的建模如上一章机械系统设计部分容,在此我们忽略对电机部分的建模,将其在S 域中所对应的部分传函视为1。
综上,我们可得系统的开环传递函数为:2298.0)()(s Ls gd s s x ==θ其中X(s)为小球的实际位置,θ(s)为电机转角,L 为横杆长度0.4m ,d 为小球直径0.04m 。
3.2 原系统稳定性分析3.2.1 原系统概述球杆系统的原系统就是一个未加任何控制器的模型,是对其分析得出的物理模型,并对其加以建模,然后分析它的稳定性。
3.2.2待校正系统单位阶跃响应分析:g=9.8;L=0.4;D=0.04;Num=[(g*D)/L];Den=[1 0 0];Plant=tf(Num,Den);%系统的开环传函kp=0.0001;Sys_cl=feedback(kp*Plant,1,-1);%求系统的闭环传函Step(Sys_cl);由待校正系统的根轨迹图及单位阶跃响应,可知该系统不稳定。
3.2.3伯德图分析num0=98;den0=[1 0 0];margin=tf(num0,den0);grid;xlabel('伯德图及稳定度分析margin')由Bode图可以看出系统相角裕度为0°,所以原系统处于临界稳定状态。
原系统根轨迹:num=[0.98];den=[1 0 0 ];rlocus(num,den);图3.4 原系统根轨迹3.3频率响应法设计球杆系统控制器3.3.1设计要求要求系统经过校正后相角裕度达到45°,保证系统达到稳定。
3.3.2相位超前控制器相位超前补偿器具有如下形式:1Ts 1Ts α(s)G c ++=α , 1α>通过频率围1/aT 和1/T (被称为角频率),相位超前补偿器将使系统增加正的相位。
超前补偿器最大可补偿的相位是90度。
我们希望大于42度的相位裕度。
计算步骤: 1、求0c ω和0γ由开环传递函数可知:K=0.980c ω=98.0=0.99rad /s , 0γ=0°2、根据要求相角裕量,估算需补偿的超前相角 ΔγΔγ =Δθ+ε=γ-0γ+ε=45°-0°+8°=53°其中 ε是为了补偿校正后,由于截止频率变大而导致的原系统相位滞后,一般取5° —12°。
3、求α:令 γϕ∆=m =53°所以4、求T为了充分利用超前网络的相位超前特性,应使校正后系统的截止频率ωc 正好在ωm 处,即取:ωc=ωm而在ωm 在点上G0(j ω)的幅值应为:-10lgα= -9.51dB从原系统的伯德图上,我们可求得:ωm=1.73rad /s93.8sin53-153sin 1=︒︒+=αωm 位于1/αT 与1/T 的几何中点,求得:5、将以上数据带入校正函数,得系统闭环传递函数为G(s)=Go(s)X αGc(s)=0.98(1.78S+1)/S2(0.20S+1)6、作出仿真伯德图 程序:Go=tf([0.98],[1 0 0]); Gc=tf([1.78,1],[0.20,1]); G=series(Go,Gc); Margin(G); Grid on;校正后的仿真伯德图为: 由仿真可知: γ=52.9°ωc=1.73rad/s校正后系统单位阶跃响应: g=9.8; L=0.4; D=0.04; Num=[(g*D)/L]; Den=[1 0 0]; Plant=tf(Num,Den);Contr=tf([1.78 1],[0.20 1]); Sys_cl=feedback(Contr*Plant,1,-1); T=0:0.01:5; Step(0.2*Sys_cl);20.0wm 1==αT图3.6 超前校正后阶跃响应仿真图由以上两图可以看出超前校正可以使系统达到稳定。