MC33886 的IN1
毕业设计基于图像传感器的自动循迹智能车
系统软件流程图
软件的开发工具和系统的调试
• 1.CodewarriorV4.7软件及其应用 • Codewarrior软件是Metrowerks公司开发的软件集 成开发环境及IDE(intergrated develop inviroment),Freescale的单片机都可以在 codewarior IDE软件下进行开发,codewarrior IDE 为软件开发提供了一系列的工具
智能车系统的分析
• 1.系统模型总体框图
• 2.系统控制电源模块分析
• 3.系统软件模块的分析
• 从该结构图中可以看出,系统的软件模块主要有: • 1. 单片机系统的初始化,包括单片机系统时钟的初始化、 ATD模块的初始化、PWM模块的初始化、增强型时钟模 块的初始化,还有一些输入输出口的初始化; • 2. 图像信号的采集:通过对图像信号波形的学习,根据图 像信号的特点,采集有效图像信号; • 3. 图像信号的处理:将采集到的信号存储在单片机中,通 过对图像信号的分析和判断来识别路径,判断黑线中间位 置,判断道路是直线还是曲线,以及通过计算判断出曲线 的斜率,从而进一步的控制舵机的转角和驱动电机的转速。 • 4. 舵机转角的控制和电机转速的控制:通过控制PWM口 的信号输出可以实现对舵机转角和轮速的控制
研究课题:基于图像传感器的自 动循迹智能车系统设置
指导老师: 学生: 专业:车辆工程
智能车概述
• 智能车是一种轮式移动机器人,它能够自主进行路径识别、 决策规划以选择最佳的行驶状态,智能车集中运用了自动 控制、传感器技术、汽车电子、电气、计算机、机械等多 个学科的知识。随着控制技术、计算机技术和信息技术的 发展,智能车在工业生产和日常生活中已扮演了非常重要 的角色。车辆智能化是汽车工业今后的发展趋势,也是人 们对安全性、智能化要求越来越高未来汽车的发展方向。 随着计算机技术和信息技术为代表的高新技术的发展,智 能车辆技术的研究将会有突破性的进展。智能车辆系统的 实用化是智能车辆发展的前进方向,适应性强、环境适应 性好的智能车辆将是研究的重点。
33886资料

9 –12
PGND
Power Ground
Device high-current power ground.
13
D2
Disable 2
Active Low input used to simultaneously tri-state disable both H-Bridge outputs. When D2 is logic Low, both outputs are tri-stated.
5.0 V Reguullator
IN1
IN2
Gate Drive
D1
D2
OOvver--
255 uµAA
Control Logic
tteemmppeerraattuurree
FS
Undervoltage
CSCSOeuuhvnrrorrSCeseerretiennrcCcntutCusiLLrrierircitiemcmunuiiitttitt,,
Document Number: MC33886 Rev 8.0, 2/2007
33886
H-BRIDGE
VW SUFFIX (PB-FREE) DH SUFFIX
98ASH70702A 20-PIN HSOP
ORDERING INFORMATION
Device
MC33886DH/R2 MC33886VW/R2
Logic Input Control 2 True logic input control of OUT2 (i.e., IN2 logic High = OUT2 logic High).
Analog Integrated Circuit Device Data Freescale Semiconductor
智能车电机驱动模块使用详解(1)
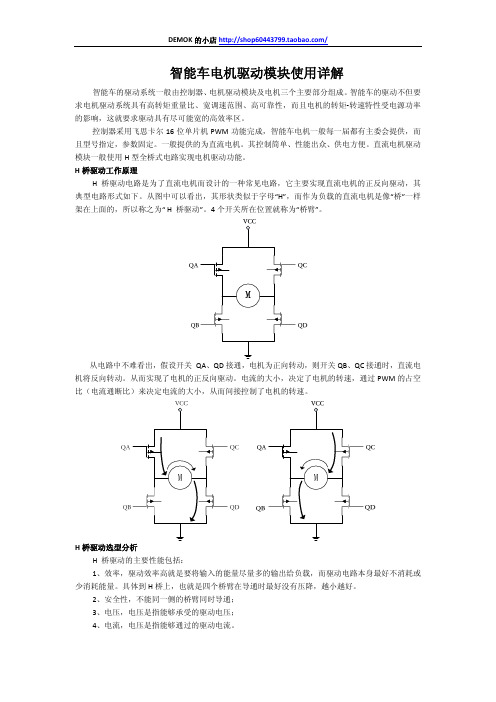
智能车电机驱动模块使用详解智能车的驱动系统一般由控制器、电机驱动模块及电机三个主要部分组成。
智能车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩‐转速特性受电源功率的影响,这就要求驱动具有尽可能宽的高效率区。
控制器采用飞思卡尔16位单片机PWM功能完成,智能车电机一般每一届都有主委会提供,而且型号指定,参数固定。
一般提供的为直流电机。
其控制简单、性能出众、供电方便。
直流电机驱动模块一般使用H型全桥式电路实现电机驱动功能。
H桥驱动工作原理H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下。
从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关 QA、QD接通,电机为正向转动,则开关QB、QC接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
电流的大小,决定了电机的转速,通过PWM的占空比(电流通断比)来决定电流的大小,从而间接控制了电机的转速。
H桥驱动选型分析H 桥驱动的主要性能包括:1、效率,驱动效率高就是要将输入的能量尽量多的输出给负载,而驱动电路本身最好不消耗或少消耗能量。
具体到H桥上,也就是四个桥臂在导通时最好没有压降,越小越好。
2、安全性,不能同一侧的桥臂同时导通;3、电压,电压是指能够承受的驱动电压;4、电流,电压是指能够通过的驱动电流。
根据H桥驱动的主要特性分析,安全性主要由控制部分决定。
在智能车设计中,电机是固定型号的(一般组委会会提供车模和电机),所以所需的电流和电压时有限的,所以H桥驱动的选型会重点关注H桥驱动的效率,即关注MOS管的压降上。
因此我们选择H桥驱动遵循以下原则:(1)由于驱动电路是功率输出,要求开关管输出功率较大;(2)开关管的开通和关断时间应尽可能小;(3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。
驱动芯片的选择
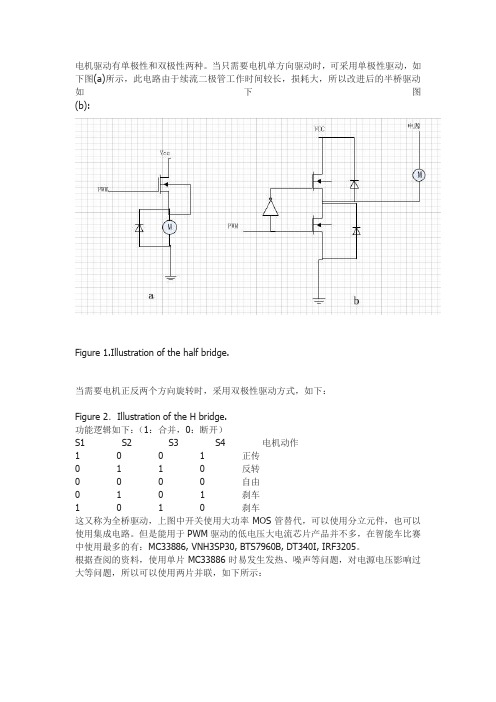
电机驱动有单极性和双极性两种。
当只需要电机单方向驱动时,可采用单极性驱动,如下图(a)所示,此电路由于续流二极管工作时间较长,损耗大,所以改进后的半桥驱动如下图(b):Figure 1.Illustration of the half bridge.当需要电机正反两个方向旋转时,采用双极性驱动方式,如下:Figure 2.Illustration of the H bridge.功能逻辑如下:(1:合并,0:断开)S1 S2 S3 S4 电机动作1 0 0 1 正传0 1 1 0 反转0 0 0 0 自由0 1 0 1 刹车1 0 1 0 刹车这又称为全桥驱动,上图中开关使用大功率MOS管替代,可以使用分立元件,也可以使用集成电路。
但是能用于PWM驱动的低电压大电流芯片产品并不多,在智能车比赛中使用最多的有:MC33886, VNH3SP30, BTS7960B, DT340I, IRF3205。
根据查阅的资料,使用单片MC33886时易发生发热、噪声等问题,对电源电压影响过大等问题,所以可以使用两片并联,如下所示:该接法降低了MOS管的导通内阻,增大了驱动电流,可以起到增强驱动能力、减小芯片发热的作用,但是起始频率受限,电机噪声大且发热严重。
VNH3SP30是意法半导体公司生产的专用于电机驱动的大电流功率集成芯片。
芯片核心是一个双单片上桥臂驱动器(HSD)和2个下桥臂开关,HSD开关的设计采用ST的ViPowe 技术,允许在一个芯片内集成一个功率场效应MOS管和智能信号/保护电路。
下桥臂开关是采用ST专有的EHD(STripFET)工艺制造的纵向场效应MOS管。
3个模块叠装在一个表面组装MultiPowerSO- 30引脚框架电绝缘封装内,具体性能指标如下: ①最大电流30 A、电源电压高达40 V; ②功率MOS管导通电阻0.034 Ω; ③5 V兼容的逻辑电平控制信号输入;④内含欠压、过压保护电路;⑤芯片过热报警输出和自动关断。
双轮平衡车的控制系统硬件设计方案小车机器人论文
摘要双轮自平衡车是一个高度不稳定两轮机器人,是一种多变量、非线性、绝对不稳定的系统,需要在完成平衡控制的同时实现直立行走等任务因其既有理论意义又有实用价值,双轮自平衡小车的研究在最近十年引起了大量机器人技术实验室的广泛关注。
本文主要介绍了双轮平衡车的控制系统硬件设计方案。
此方案采用ATmega328 作为核心控制器,在此基础上增加了各种接口电路板组成整个硬件系统,包括单片机最小系统,姿态检测模块,直流驱动电机控制模块,电源管理模块,测速编码模块,串口调试等模块。
对于姿态检测系统而言,单独使用陀螺仪或者加速度计,都不能提供有效而可靠的信息来保证车体的平衡。
所以采用一种简易互补滤波方法来融合陀螺仪和加速度计的输出信号,补偿陀螺仪的漂移误差和加速度计的动态误差,得到一个更优的倾角近似值。
本文先阐述了系统方案原理,再分别就各模块工作原理进行详细的介绍与分析,最终完成车模的制作和电路原理图以及1PCB 板的绘制。
最后根据调试情况对整个系统做了修改,基本达到设计要求。
关键词双轮自平衡车模块设计传感器AbstractTwo-wheeled self-balanced car is a highly unstable robots, it is a system with Multivariable, nonlinear and absolute instability, it needs to complete the balance control tasks such as walking upright because of both theoretical significance and practical value. Two-wheeled self-balanced car in the last decade has aroused widespread concern in the robotics laboratory.This paper describes the control system hardware design of the wheel balanced car.This program uses ATmega328 as the core controller,base on this increase of various interface circuit board to building the hardware system. Peripheral circuits including the smallest single-chip system, the gesture detection module, the DC drive motor control module, power management module, velocity encoding module and serial debugging module. For the posture monitoring system,the information solely depends on the gyroscope or the accelerometer couldn’t make sure the balance of vehide.So the signals from the gyroscope and accelerometer were integrated by a simple method of complementary filtering for an optimal angle to compensate the gyroscope drift error and the accelerometer dynamic error.This article first describes the principle of the system program,then described in detail each module how to working out, the final completion of car models produced and circuit schematics and the PCB drawing.In the end, according to debug the situation on the whole system changes, the hardware system basically reached the design requirements.Keywords two-wheeled self-balanced car modular design sensor目录前言 (1)第1章绪论 (2)1.1 设计的依据与意义 (2)1.2 国内外同类设计的概况综述 (3)1.3 设计要求与内容 (3)第2章总体硬件方案设计 (5)2.1 总体分析 (5)2.2 总体方案设计 (5)2.3 方案框图 (7)第3章单元模块设计 (8)3.1 姿态检测模块 (8)3.2 单片机控制单元模块电路 (14)3.3 电机驱动模块 (19)3.4 串行通信模块 (21)3.5 电源管理模块 (24)结论 (26)参考文献 (27)致谢 (28)附录 (29)前言自平衡车自动平衡运作原理主要是建立在一种被称为“动态稳定”(DynamicStabilization)的基本原理上,也就是车辆本身的自动平衡能力。
AGV观光车运行控制系统设计毕设说明书
AGV观光车运行控制系统设计摘要AGV即自动导引小车,指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。
一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴于地板上,自动导引车则依循电磁轨道所带来的讯息进行移动与动作。
本次设计完成原车的总体结构分析和电路图的绘制,在原车的基础上融入新的自动控制系统,选定以单片机微控制器的作为核心进行运动控制系统设计。
设计过程如下: 首先,搜集关于AGV的资料,了解AGV的国内外发展现状及趋势,对课题有一个明确的把握,同时熟悉电动车的驱动系统原理及其控制方式,掌握本课题设计中所用到的辅助软件并能熟练使用;其次,通过对原车相关资料的学习及对车体必要的拆卸,对原车进行总体结构分析,包括车的主要部件构成,各部件作用及相互之间的连接关系。
在此基础上,通过对线路的实际观察、电流检测及线路去向检测,绘制出原车的总体电路图,从而对该观光车的构造有较全面的认识,并对下一步的改造设计打好基础;再次,设计电机驱动部分.本次设计中包含两种电机,驱动电机和转向电机,要能够实现小车的前进、后退、停止,及转向角度的控制,转向需要编码器作为角度测量反馈.驱动电机上装有旋转编码器,能对小车的速度进行实时检测;最后,CAN总线传输设计.确定CAN信息格式,本车作为CAN接收时,接受上位机控制指令,作为发送器时,发送本车运行状态参数.关键词:AGV,电动车,单片机,伺服驱动,转向控制,速度检测,CAN通信The Design of Servo Operation Control System of AGVSightseeing VehicleABSTRACTAGV automatic guided vehicles,equipped with electromagnetic or optical automatic guiding device, such as can be guided by the along a prescribed path,with security protection as well as a variety of transfer function of transporters,industrial applications do not need the driver's truck, with the rechargeable battery as its power source。
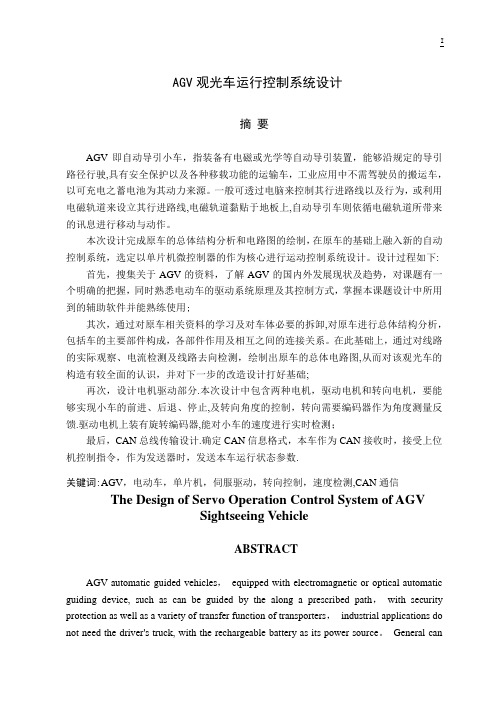
MC33886不同接法电路
电机速度控制的不同接法速度控制原理(包括正反转):通过改变电机驱动芯片MC33886所输入的PWM波的占空比,来控制对电机的供电电压的大小,从而控制电机的转动速率。
MC33886芯片的真值表如下:在设计过程中通过了向IN1,IN2口送出PWM波来控制电机的正转和反转,使用了电机的正转为智能车加速,当转弯的时候利用了反转PWM波来控制电机的减速,在无倍频的情况下,输出方波为5kHz,。
PWMPER XY= 2400;MC33886芯片内含错误报告管/FS,,通过将其接到单片机PT2口来进行错误捕捉。
通过PWM5,PWM7的开启,送数和关断,向IN1和IN2送PWM波,自动控制电机的正反转,通过反转来刹车。
接法一:单片MC33886-正反转引自《基于HCS12的小车智能控制系统设计》2.5 车速控制单元车速控制单元采用RS-380SH型直流电机对小车速度进行闭环控制,并用MC33886电机驱动H-桥芯片作为电机的驱动元件。
车速检测元件则采用日本Nemicon公司的E40S-600-3-3型旋转编码器,其精度达到车轮每旋转一周,旋转编码器产生600个脉冲。
系统通过MC9S12DG128输出的PWM信号来控制直流驱动电机。
考虑到智能车由直道高速进入弯道时需要急速降速。
通过实验证明:当采用MC33886的半桥驱动时,在小车需要减速时只能通过自由停车实现。
当小车速度值由80降至50时(取旋转编码器在一定采样时间内检测到的脉冲数作为系统速度的量纲),响应时间约为0.3 s,调节效果不佳;当采用MC33886的全桥驱动时,其响应时间约为0.1 s。
因此系统利用MC33886的全桥结构,实现了小车的快速制动。
其电机驱动电路如图7所示。
VCC为电源电压7.2 V,IN1和IN2分别为MC33886的PWM信号输入端口。
MC33886的输出端口OUT1和OUT2分别接驱动电机的两端。
D1、D2为芯片的使能端。
接法二:双片MC33886-可正反转引自《西安理工技术报告》3.2 转速控制电路3.2.1 直流电机驱动直流电机驱动采用飞思卡尔公司的5A 集成H 桥芯片MC33886。
几种电机驱动的比较
智能车竞赛中直流电机调速系统的设计与比较王名发,江智军,邹会权 时间:2009年12月04日字 体:关键词:直流电机调速系统MC33886VNH3SP30BTS7960BDT340IIRF3205摘 要:针对大学生智能车竞赛中直流电机的驱动设计了6种方案,经过实验比较分析了各种方案的优缺点,最后确立了一套驱动能力强、体积小、性能稳定的驱动方法,可广泛应用于40 V以下的大功率直流电机驱动的场合。
关键词:直流电机;调速系统; MC33886; VNH3SP30; BTS7960B; DT340I; IRF3205目前大电流直流电机多采用达林顿管或MOS管搭制H桥PWM脉宽调制,因此体积较大;另一方面,由于分立器件的特性不同,使得驱动器的特性具有一定的离散性;此外,由于功率管的开关电阻比较大,因此功耗也很大,需要功率的散热片,这无疑进一步加大了驱动器的体积。
随着技术的迅猛发展,基于大功率MOS管的H桥驱动芯片逐渐显现出其不可替代的优势。
但目前能提供较大电流输出的集成芯片不是很多。
例如飞思卡尔半导体公司推出的全桥驱动芯片MC33886和33887、意法半导体公司推出的全桥驱动芯片VNH3SP30、英飞凌公司推出的高电流PN半桥驱动芯片BTS7960。
ST微电子公司推出的TD340驱动器芯片是一种用于直流电机的控制器件,可用于驱动N沟道MOSFET管。
本文在第三、四届大学生智能车大赛中分别尝试了上面提到的5块电机驱动芯片设计的驱动电路,通过现场调试发现它们的优缺点,确定了驱动能力强、性能稳定的驱动方案,并得到了很好的应用。
1 直流电机驱动原理目前直流电机的驱动方式主要有2种形式:线性驱动方式和开关驱动方式。
其中线性驱动方式可以看成一个数控电压源。
该驱动方式的优点是驱动电机的力矩纹波很小,可应用于对电机转速要求非常高的场合;缺点是该方式通常比较复杂,成本较高,尤其是要提高驱动的功率时,相应的电路成本将提升很多[1]。
几种电机驱动的比较
智能车竞赛中直流电机调速系统的设计与比较王名发,江智军,邹会权 时间:2009年12月04日字 体:关键词:直流电机调速系统MC33886VNH3SP30BTS7960BDT340IIRF3205摘 要:针对大学生智能车竞赛中直流电机的驱动设计了6种方案,经过实验比较分析了各种方案的优缺点,最后确立了一套驱动能力强、体积小、性能稳定的驱动方法,可广泛应用于40 V以下的大功率直流电机驱动的场合。
关键词:直流电机;调速系统; MC33886; VNH3SP30; BTS7960B; DT340I; IRF3205目前大电流直流电机多采用达林顿管或MOS管搭制H桥PWM脉宽调制,因此体积较大;另一方面,由于分立器件的特性不同,使得驱动器的特性具有一定的离散性;此外,由于功率管的开关电阻比较大,因此功耗也很大,需要功率的散热片,这无疑进一步加大了驱动器的体积。
随着技术的迅猛发展,基于大功率MOS管的H桥驱动芯片逐渐显现出其不可替代的优势。
但目前能提供较大电流输出的集成芯片不是很多。
例如飞思卡尔半导体公司推出的全桥驱动芯片MC33886和33887、意法半导体公司推出的全桥驱动芯片VNH3SP30、英飞凌公司推出的高电流PN半桥驱动芯片BTS7960。
ST微电子公司推出的TD340驱动器芯片是一种用于直流电机的控制器件,可用于驱动N沟道MOSFET管。
本文在第三、四届大学生智能车大赛中分别尝试了上面提到的5块电机驱动芯片设计的驱动电路,通过现场调试发现它们的优缺点,确定了驱动能力强、性能稳定的驱动方案,并得到了很好的应用。
1 直流电机驱动原理目前直流电机的驱动方式主要有2种形式:线性驱动方式和开关驱动方式。
其中线性驱动方式可以看成一个数控电压源。
该驱动方式的优点是驱动电机的力矩纹波很小,可应用于对电机转速要求非常高的场合;缺点是该方式通常比较复杂,成本较高,尤其是要提高驱动的功率时,相应的电路成本将提升很多[1]。
mc33886驱动板说明书
mc33886电机驱动器说明书尊敬的客户:您好!感谢您选用本店的电机驱动模块,为了更快更好的使用本产品,请您仔细的阅读本使用说明书。
一、基本介绍本驱动板是一款大电流电机驱动板,采用飞思卡尔公司生产的电机驱动芯片mc33886.本驱动板可同时驱动两个电机,输出电流可以达到5A,可以实现电机PWM调速,正反转,制动等实时控制功能。
并具有过流,欠压和温度过高自动保护,以及故障状态提示功能.输入电压:单一电源供电, 6.5V~28V分开供电(+5V与电机电源分开)5V~28V温度范围:-40℃~125℃PWM波频率:≤10KHZ输入控制与与电机运行状态(1表示高电平,0表示低电平,X表示任意状态)表一真值表(以1号电机为例)注:2号电机完全一样二、应用说明各个控制功能接线端子序号如下图所示,1、电源指示灯,上电后灯亮表示正常。
2、电机电源输入接线端子,驱动器的工作电流小于1A 时,可以使用该接线端子。
3、电机供电电源输入接线端子,如果驱动器的工作电流比较大(≥1A ),建议使用2号接线端子输入输入电机运行状态F1D1P1111正转110停止11PWM 正转调速101反转100停止10PWM 反转调速0XX刹车4、短接端子,当驱动器只由一个电源供电时,该端子用短线帽短接,如果电机供电电压大于等于12V,请将5V电源单独供电。
5、+5V电源单独供电的输入接线端子。
6、两路驱动器故障指示灯,驱动器工作时,如果mc33886芯片出现过流,欠压,或者温度过高的现象,对应的led将点亮,并FS1或者FS2接线端子处于低电平。
7、两路电机旋转方向指示灯,L_M1对应第一路电机。
L_M2对应第二路电机。
灯亮和灯灭分别表示一个旋转方向。
8、电机控制信号输入接口。
其中P1、P2分别为两路电机的PWM控制信号输入端,D1、D2分别为两路电机的旋转方向控制信号输入端,具体的控制逻辑请查看表一。
该插槽的插针与信号的对应关系如下(俯视,豁口朝上,x表示未连接)9、第二路电机控制输出端子,当电动机的工作电流比较小的时侯(≤1A),可以使用该接线端子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MC33886 的IN1,IN2 口一般用于PWM 的输入,D1,D2 使能信号接I/O 口。
但是根据MC33886 的真值表和大量试验发现,当IN2 不接,OUT2 输出高电平,若此刻IN1 输入PWM 方波处于高电平的时候,OUT1 也处于高电平,如果电机采用
OUT1,OUT2 驱动,则相当于电机两端此刻短接,电机刹车,带来两个后果,一个是电机、芯片发热严重,另外一个,电机转速低,从微观上看,相当于一会加速,一会刹车;但是,如果让D1,D2 作为PWM 输入口,使能禁止的时候,OUT1 (或相应的OUT2)成高阻态,电机滑行,而不是刹车,很好的解决了以上两个
由CPU 发出PWM 波通过33886 驱动芯片控制电机的电压. PWM2 输出
PWM波,经由IN1 口输入。
OUT1 输出电机调速信号。
通过预设的DUTYCYCLE 电机的转速进行调解。
工作电压:5-40V
导通电阻:120 毫欧姆
输入信号:TTL/CMOS
PWM 频率:< 10KHz
具有短路保护、欠压保护、过温保护等;
驱动芯片MC33886 内部具有短路保护、欠压保护、过温保护等功能。
MC33886 部集成有两个半桥驱动电路,本设计中,因为只需控制小车前进的速度不需
其中D1、D2是MC33886的使能端,IN1、IN2为输入端,OUT1、OUT2
为其输出端。
单片机通过PWM通道的占空比控制电机速度,IN2 和IN1分别接
到PP1和PP0上控制电机的正转和反转速度(因为电机工作频率小于10KHz,
所以一个通道控制电机速度就够了),正转为智能车加速,当转弯时利用了反转
PWM波来控制电机的减速;D1和D2接到单片机的IO口上控制电机转动方向(正转或反转)。