步态相位关系
步态分析完整版PPT课件

31
www,
2评定内容
步态分析是在详细了解患者病史和全面体格 检查的基础上进行的。
1.病史 了解与步态相关的症状,如行走时 有无伴随疼痛、持续的时间;通过询问既往 史,可以了解既往有无与影响步态的疾病, 如骨折、肌肉或神经疾病、肿瘤等。
(二)、定量分析
步态的定量分析是通过器械或专门的设备获得 的客观数据对步态进行分析的方法。所用的器械 或设备可以非常简单,如卷尺、秒表、量角器等 测量工具以及能留下足印的设备;也可以是较为 复杂,如利用电子角度计、肌电图、录像、高速 摄影,甚至步态分析仪等设备,通过运动学参数、 动力学参数、肌电活动参数及能量参数进行这项 工作。
①确定观察角度 ②观察分析表的应用
(见表14-3)
33
www,
RLA八分法
是由美国加州Rancho Los Amigos康复医院 的步态分析实验室提出的。它在传统步态时相 分期的基础上,利用步态分析棍图处理技术全 面、系统阐述了视觉观察分析技术,如在一个 步行周期中求出八个典型动作姿位点,即支撑 前期(initial contact)、支撑初期(loading response)、支撑中期(midstance)、支撑 末期(terminal stance)、摆动前期( preswing)、摆动初期(initial swing)、摆 动中期(midswing)、摆动末期(terminal) 。
• 任何环节的失调都可能影响步态, 而某些异常也有可能被代偿或掩 盖。
3
www,
二、自然步态的要点 (1) 合理的步长、步宽、步频。 (2) 上身姿势稳定。
四足机器人腿部机械机构设计
摘要机器人的研发和使用现已经成为世界各国的重要科研项目,用它来代替人的操作项目或帮助残疾人完成自己不能完成的项目活动。
在工业,手工业,重工业等方面机器人的辅助功能尤为突出,大大提高了工作效率,节省开支。
四足机器人的行走机构是四足机器人运动的载体。
其中四足机器人的腿部是行走机构的重要组成部分。
因此,本文系统的介绍了国内外四足机器人的发展历史和发展情况,着重分析了四足机器人的腿部的机械结构并对此进行设计研究。
极大的提高了四足机器人的负载能力,减少了驱动原件的使用,同时结合模仿四足生物形态做出本次设计。
对设计的四足机器人腿部机械结构进行了细致的分析。
关键词:四足机器人;腿部机械机构;结构设计;2.1.2闭环平面四杆机构这种机构可以克服开链结构承载能力低的缺点,刚度更好,功耗更低,所以在机器人的领域当中收到了非常大的欢迎。
如图 2.5中的机构是我们经常使用的一种闭环平面四杆行走机构,如图 2.6中机器人承受的机体质量是由Z轴的驱动器完成,让机体前进的动力是由X轴和Y驱动器提供的,这样的话,它的内部就得到了非常好的协调和优化。
此缩放式腿机构还有成比例的特点,进而将驱动器的运动推进距离成比例放大成足端部的运动距离。
它的缺点是:缩放机构的直线驱动关节不管是圆柱坐标系还是笛卡尔坐标系都至少需要两个,从而使机械结构复杂,质量重,旦驱动距离影响机器人脚端的运动范围,运动空间较小。
图2. 5平面四杆行走机构图2. 6平面四杆行走机构坐标系模型建立如图所示的坐标系模型,髓关节为B点,围绕Z轴旋转,角度为a,悬长为 A 大腿杆A0绕0点旋转,杆长为妇,其与的延长线的夹角为。
;大腿杆。
2绕0 点旋转,杆长为其与8。
|的延长线的夹角为(P:由此可推出A点的运动轨迹方程为:-x A =ucosay A = it sin a式(2-5)「N = A + L?cosJ3 + L3COS^.v= L2sin /7 + Z^sin^众所周知,当四杆机构的两杆发生重合时,机构就会出现死点,为了阻止四杆机构出现死点情况,现有的办法是规定大、小腿杆之间的角度,最大角度为吮心,最小角度为Ymin,在各种情况之下的两杆之间的角度Y,都应该做到满足Ymax> Y > Ymin约束自己的情况。
第三章 4.步态分析

小腿与地面垂直
摆动相末期
指迈步即将结束,足在落地
之前的阶段,主要动作是下 肢前向运动减速,准备足着 地的姿势,步行周期的13%。
肌肉:髂腰肌、臀大肌、腘
绳肌、股四头肌、胫前肌。
此期肌肉控制最复杂。
步态周期中的肌肉活动
肌肉活动是步行的动力基础。 关节运动与肌肉活动关联复
运动学分析
动力性分析
动态肌电图
zhengdawufuyuan
25
步态分析
运动学分析:研究步行时肢体运动时间和空间变化规律的
方法。
主要包括: 人体重心 廓清机制
时间-空间参数测定
节段性运动测定
zhengdawufuyuan
中枢神经疾病常见异常步态 脑瘫步态
痉挛型 股内收肌、小腿三头肌
步态分析:中枢神经疾病常见异常步态
和胫后肌痉挛踮足剪刀步态
严重内收肌痉挛,腘绳肌痉挛代
偿出现款屈曲、膝屈曲和外翻, 足外翻 蹲伏步态。
共济失调型 肌张力不稳定,步
行摇晃不稳醉汉步态。
zhengdawufuyuan 47
支撑相欢喜支撑力降低,膝过伸代偿足下垂 健腿在前,患腿在后,侧身患足在地面拖行
中枢神经疾病常见异常步态 截瘫步态
L3平面以下损伤
小腿三头肌、胫前肌瘫痪,
步态分析:中枢神经疾病常见异常步态
跨槛步态。足落地缺乏踝
关节控制,通过膝过伸增 加膝踝关节稳定。
L3平面以上损伤步态变化
很大
zhengdawufuyuan 46
重心向对侧转移,又称摆动
前期。
摆动相早期
指支撑腿足趾离地之前的一段
【康复评定】步态分析康复评定,一文读懂

【康复评定】步态分析康复评定,一文读懂步行周期指行走过程中足地至该侧足跟再次着地时所经过的时间。
每一侧下散有其各自的步行周期。
每一个步行周期分为站立相和迈步相两个阶段。
站立相又称支撑相为足底与地面接抽的期边远步相亦称摆动根指支离开地面向动的阶。
站步行周期的60%短步相约占其中的40%一条腿与地面接触并负重时称“单支撑期体重从一侧下肢向另一侧下肢传递,双足同时与地面接触时称为“双支撑期”。
(1)首次着地:步行周期和站立相的起始点指足跟或足底的其他部位第一次与地面接触的瞬间。
正常人行走时的首次着地方式为足跟着地。
不同的病理步态中,首次着地方式表现各异,如前脚掌(即跖骨头)着地、足底外侧缘着地、足跟与前脚掌同时着地。
(2)负荷反应期:指足跟着地后至足底与地面全面接触瞬间的一段时间,即一侧足跟着地后至对侧下肢足趾离地时(0~15%步行周期),为双支撑期,是重心由足跟转移至足底的过程,又称承重期,指正常行走时足跟着地至膝关节屈曲角度达到站立相期间的最大值(约发生在10%~15%步行周期)。
(3)站立中期:指从对侧下肢离地至躯干位于该侧(支撑)腿正上方时(15%~40%步行周期),为单腿支撑期,此时重心位于支撑面正上方。
(4)站立末期:为单腿支撑期,指从支撑腿足跟离地时到对侧下肢足跟着地(40%~50%步行周期)。
(5)迈步前期:指从对侧下肢足跟着地到支撑腿足趾离地之前的一段时间(50%~60%步行周期),为第二个双支撑期。
(6)迈步初期:从支撑腿离地至该腿膝关节达到最大屈曲时(60%~70%步行周期)。
此阶段主要目的是使足底离开地面(称为足廓清),以确保下肢向前摆动时,足趾不为地面所绊。
(7)迈步中期:从膝关节最大屈曲摆动到小腿与地面垂直时(70%~85%步行周期)。
保持足与地面间的距离仍是该期的主要目的。
(8)迈步末期:指与地面垂直的小腿向前摆动至该侧足跟再次着地之前(85%~100%步行周期)。
该期小腿向前摆动的速度减慢并调整足的位置,为进入下一个步行周期做准备。
基于SVM-KNN的人体步态相位识别
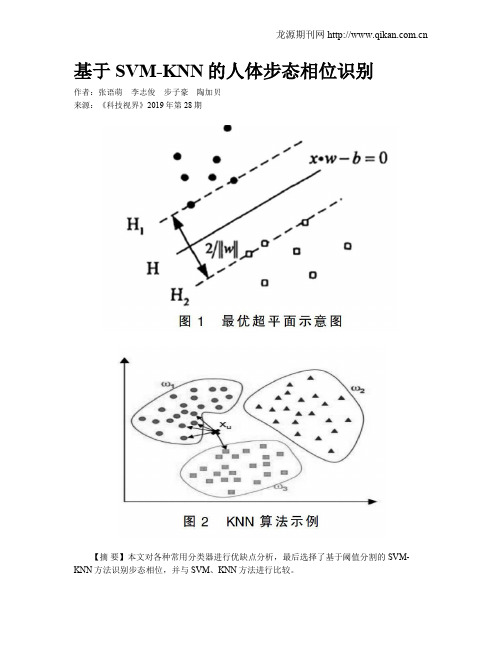
基于SVM-KNN的人体步态相位识别作者:张语萌李志俊步子豪陶加贝来源:《科技视界》2019年第28期【摘要】本文对各种常用分类器进行优缺点分析,最后选择了基于阈值分割的SVM-KNN方法识别步态相位,并与SVM、KNN方法进行比较。
【关键字】外骨骼机器人;步态相位识别;SVM-KNN;阈值分割中图分类号: TP242 文献标识码: A 文章编号: 2095-2457(2019)28-0023-002DOI:10.19694/ki.issn2095-2457.2019.28.006【Abstract】In this paper, the advantages and disadvantages of various classifiers are analyzed. Finally, SVM-KNN method based on threshold segmentation is selected to identify gait phase, and compared with SVM and KNN methods.【Key words】Exoskeleton robot; Gait phase recognition; SVM-KNN; Threshold segmentation外骨骼机器人技术现如今已广泛地应用在军事、生活、医疗等方面,外骨骼的控制方式是基于人的运动意图来进行控制的。
目前有很多种方式可以获取人体的运动意图信号,根據不同的获取方式,可以简单地将控制方法分为三种:基于图像的方式、基于运动传感器的方式和基于生物电信号方式。
分类算法的选择对于判断人体的运动意图的准确性,提高人体平地行走的步态相位模式分类的准确率非常重要。
目前常用于模式分类的算法主要有神经网络、隐马尔可夫、模糊分类器、动态时间规整、支持向量机、K近邻法等。
1 基于SVM与基于KNN的分类识别方法1.1 基于SVM的分类识别方法支持向量机是一种二分类器,是针对线性可分类问题的最优化分类而提出的。
步态的基本组成

步态的基本组成一、步态的周期步态的周期是指每一个步态循环所包含的全部阶段。
在正常步态中,步态周期由两个步长(stride length)和一个双足支撑(double support)阶段组成。
步长是指一个步态周期中每一步的距离,双足支撑阶段是指行走时两只脚同时接触地面的时间段。
二、步态的相位步态的相位是指两只脚走路时各自相对于步态周期所处的不同阶段。
正常步态中,两只脚之间的相位差是50%,即步态周期的一半。
相对相位是指两只脚在行走过程中相对于垂直地面的角度。
三、步态的节奏步态的节奏是指步态周期中每个阶段所持续的时间。
不同身体部位的动作需要协调,不同节奏的连续性不断起伏,才能保证正常的步态和动作。
步态的节奏与速度、身体姿态和肌肉协调有关。
具体来说,步态的节奏主要由双足支撑期和单足支撑期的协调来维持。
四、步态的步长步长是指两个步态周期中,每一步前进的距离。
根据行走的速度和参与者的生理因素,步长可以有很大的变化。
步长通常以脚尖或脚跟的位置为基准进行测量,并以单位长度来表示。
步频是指在规定时间内,身体完成的步数。
步频是步态的核心要素之一,它直接影响着人体的节奏和力度。
步频通常以每分钟步数为单位进行测量,并可以通过在跑步机上进行心率监测来评估步频和步行质量。
支撑期是指使用脚来支撑身体时,脚与地面接触的时间。
该阶段包括单足支撑期和双足支撑期。
单足支撑期是指只有一个脚在地面上,另一个脚处于摆动期。
当支撑期结束时,脚离地并进入了摆动期,同时另一只脚离开地面并进入支撑期。
而双足支撑期是指两个脚同时接触地面。
七、步态的大腿、小腿、脚掌的摆动步态的大腿、小腿、脚掌的摆动是指在步态周期中不同阶段下各个身体部位的运动和角度变化。
通常来说,脚掌和小腿同步向后摇摆,大腿则向前摆动,并在向前摆动时发生一系列的肌肉变化。
总结步态是人的基本动作之一。
它由步态周期、相位、节奏、步长、步频、支撑期和大腿、小腿和脚掌摆动等组成。
人体的这些行走特征是通过神经系统和肌肉系统协同合作完成的。
仿生机器狗机构特性与步态规划
中文摘要近年来,随着人工智能的兴起,机器人技术得到蓬勃的发展,成为当今世界研究的热门领域之一。
与轮式或者履带式机器人相比,足式机器人的离散式落足支撑更能适应非连续地面,比如山地、沟渠、坑洼地面等,这使得足式机器人成为机器人研究领域的热点。
足式机器人的灵感最早来源于生物,是对生物形态和运动的模仿。
本文机器人的模仿对象为犬类,研制的机器人为仿生机器狗。
首先,研究生物狗的结构特征和运动特性。
第一步即研究犬类的生理结构,分析犬类四肢的作用,然后利用高速摄像机对标记好的生物狗进行运动捕捉,拍摄生物狗在不同运动状态下的运动视频。
通过PHOTRON软件提取视频中标记点的有效数据,提取出的数据在软件MATLAB中分析处理,最终得到生物狗的结构特性和运动规律。
其次,根据研究所得的生物狗运动规律,参考生物狗的关节角变化范围、关节连接方式和形体尺寸等,设计仿生机器狗的本体结构,包括四肢和腰部。
接着建立仿生机器狗的运动学模型,对单腿和整机进行运动学分析,通过运动学正解得到足端运动空间,通过运动学逆解得到各关节的转角以及电机驱动角。
接下来,规划出仿生机器狗的快速步态、慢速步态和转换步态。
根据实验中生物狗的摆腿顺序规划出各个步态下相应腿的相位,并根据生物狗的足端轨迹特性规划快速步态和慢速步态的足端轨迹。
其中针对快速步态的足端轨迹研究对比了多项式与复合摆线,选出更适合仿生机器狗的多项式足端轨迹,并根据其稳定性判据判断快速步态的稳定性。
慢速步态足端轨迹则采用多项式与直线结合的形式,使机器人相对于地面匀速运动,根据稳定裕度判断慢速步态稳定性。
转换步态中提出在同一时间内四足相位与足端轨迹同时转换的方式,快速完成步态切换,且保证在任何时刻都有至少两条腿与地面接触。
三种步态都在ADAMS软件中进行仿真,仿真结果表明三种步态均可平稳运动。
最后,搭建仿生机器狗的实验平台,对所规划的三种步态进行实验,实验表明,三种步态与规划的运动一致,可进行稳定的快速步态行走、慢速步态行走、并且快速的完成步态转换。
9.1步态的基本概念
步态的基本概念一、步态分析1.定义:是利用力学原理和人体解剖学、生理学知识对人类行走状态进行对比分析的一种研究方法,包括定性分析和定量分析。
2.步态(gait):是指人体步行时的姿势。
包括步行(walking)和跑(running)二、正常步态的基本构成1.步长:行走时一侧足跟着地到紧接着的对侧足跟着地所行进的距离。
2.步频:行走中每分钟迈出的步数。
3.步速:行走时单位时间内在行进的方向上整体移动的直线距离。
4.步幅:行走时,由一侧足跟着地到该侧足跟再次着地所进行的距离。
5.步行周期:在行走时一侧足跟着地到该侧足跟再次着地的过程。
6.步行时相:一个步行周期可分为支撑相和摆动相。
三、步行周期1.支撑相支撑相是指在步行中足与地面始终有接触的阶段,支撑相包括单支撑相和双支撑相。
(1)单支撑相:通常指一侧下肢足跟着地到同侧足尖离地的过程,一般占一个步行周期的40%。
(2)双支撑相:在一个步行周期中,当一侧下肢完成足跟抬起到足尖向下蹬踏离开地面的时期内,另一侧下肢同时进行足跟着地和全足底着地动作,所以产生了双足同时着地的阶段。
2.摆动相摆动相是指在步行中始终与地无接触的阶段,通常指从一侧下肢的足尖离地,到同侧足跟着地的阶段,一般占一个步行周期的40%。
四、正常步态的运动学变化人体在行走过程中承受着来自地面的地反应力和力矩。
地反应力分为垂直分力、前后分力和侧向分力.五、正常行走状态的动力学区别静态站立时,地面反应力等于体重。
走路时人的重心在不断地上下移动,双支撑相时重心最低,相当于以双腿为边步长为底的等腰三角形的高。
而摆动相中期的重心最高,相当于腿长(实际上还要加一个常量)。
六、参与的主要肌肉活动1.竖脊肌:在步行周期支撑相初期和末期,竖脊肌活动达到高峰,以确保行走时躯干保持正直。
2.臀大肌:收缩活动始于摆动相末期,并于支撑相中期达到高峰。
在摆动相后期臀大肌收缩,约在步行周期的85%.3.髂腰肌:髋关节于足跟离地至足趾离地期间伸展角度达到峰值(10°~15°)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步态相位关系
步态相位关系是指步态周期中不同步态事件之间的时间关系。
常见的步态相位关系包括:
1.踏步相位关系:踏步相位是指一只脚从着地到离地再到着地的一个周期。
踏步相位关系指两只脚的踏步相位之间的时间关系。
正常步行时,左右脚之间的踏步相位关系为180度,即左脚着地时,右脚已经完成了一个踏步相位。
2.摆臂相位关系:摆臂相位是指步态周期中上肢前摆和后摆的时间关系。
摆臂相位关系指左右上肢的摆臂相位之间的时间关系。
正常步行时,左右上肢之间的摆臂相位关系为0度,即左臂前摆时,右臂也在前摆。
3.踵扫相位关系:踵扫相位是指步态周期中足跟着地到离地的时间关系。
踵扫相位关系指两只脚的踵扫相位之间的时间关系。
正常步行时,左右脚之间的踵扫相位关系为0度,即左脚的足跟着地时,右脚的足跟也接近着地。
步态相位关系可以用来评估步态的正常性和异常性,以及评估运动障碍患者的治疗效果。