空间解析几何-第5章 正交变换与仿射变换
仿射变换
或
a11 a12 x a13 x' . ka y ' 21 a22 y a23
其中(x, y)与(x', y')为φ的任一对对应点P, P'的坐标, 矩阵
a11 a12 A 称为的矩阵, 满足AA ' A ' A E,即A为二阶正交矩阵. a21 a22
{
A为非异矩阵 存在k>0, A可化为k乘以一个正交阵, A为正交矩阵
仿射变换 相似变换. 正交变换
其中(x, y)与(x', y')为φ的任一对对应点P, P'的坐标, 矩阵
a11 a12 A 称为的矩阵, 满足AA ' A ' A E,即A为二阶正交矩阵. a21 a22
几何变换
二 相似变换
设 φ 为平面上的一个点变换,平面上任意的相异两点 P,Q在φ下的像分别为P’,Q’,满足
几何变换
三种几何变换 对于平面上取定的直角坐标系, 如下点变换φ x ' a11 a12 x a13 a y ' 21 a22 y a23
a11 a12 设A ,若 a 21 a22
或
a11 其中(x, y)与(x', y')为任一对对应点P, P'的坐标, 矩阵 A a21
满足|A|≠0, 称为仿射变换φ的矩阵.
a12 a22
注:1.仿射变换是平面上的一个双射. 2.仿射变换使共线点变为共线点, 不共线点变为不 共线点, 平行直线变为平行直线; 3.仿射变换保持共线三点简单比不变, 但是不能保 持距离、夹角不变. 定理1.13(i). 平面上两个仿射变换的积是一个仿射变换; (ii). 平面上的恒同变换是一个仿射变换; (iii). 任一个仿射变换的逆变换是一个仿射变换.
空间解析几何的正交变换正交变换的性质与计算

空间解析几何的正交变换正交变换的性质与计算正交变换是一类在空间解析几何中具有重要地位的变换。
它是指在空间中既保持长度不变,又保持两向量之间的夹角不变的变换。
在此文章中,我们将探讨正交变换的性质与计算方法。
一、正交变换的定义与性质正交变换在空间解析几何中被广泛运用。
它是指一个线性变换,使得空间中的任意向量经过该变换后,向量的长度保持不变,并且向量之间的夹角也保持不变。
具体而言,设给定空间中的两个向量A和B,经过正交变换T后,它们的长度和夹角分别为A'和B'。
则有以下性质:1. 长度不变:经过正交变换T后,向量的长度保持不变,即|A|=|A'|,|B|=|B'|。
2. 夹角不变:经过正交变换T后,向量之间的夹角保持不变,即∠(A,B)=∠(A',B')。
3. 内积不变:经过正交变换T后,向量之间的内积保持不变,即A·B=A'·B'。
4. 正交性:若经过正交变换T后的向量A'与向量B'垂直(即A'⊥B'),则原始向量A与B也一定垂直(即A⊥B)。
二、正交变换的计算方法根据上述性质,我们可以利用矩阵来计算正交变换。
设空间中的向量A=[a₁, a₂, a₃],我们可以构造一个正交矩阵T,满足以下性质:1. T的行、列是正交单位向量2. T的行、列是长度为1的向量有了正交矩阵T,我们可以通过矩阵乘法来计算变换后的向量A':A' = T·A计算变换后的向量B'时,同样可以使用上述公式。
对于特定的正交变换,我们可以使用不同的矩阵来进行计算。
例如:1. 旋转变换:设给定一个旋转轴n和一个旋转角度θ,对于任意向量n,它的旋转变换可以表示为:R(θ) = [cosθ+nₓ²(1-cosθ), nₓnᵧ(1-cosθ)-n n sinθ, nₓn_z(1-cosθ)+n_ssinθ][nₓnᵧ(1-cosθ)+n_sn_z, nᵧ²(1-cosθ)+n n sinθ, nᵧn_z(1-cosθ)-n_ssinθ][nₓn_z(1-cosθ)-n_ssinθ, nᵧn_z(1-cosθ)+n_ssinθ, n_z²(1-cosθ)+nnsinθ]其中n = [nₓ, nᵧ, n_z]为旋转轴的单位向量,θ为旋转角度。
空间几何的仿射变换

空间几何的仿射变换几何学是研究图形、空间、数量等概念的学科。
其中,空间几何是研究空间运动和空间图形之间的关系的学科。
空间几何中有一个重要的概念叫做仿射变换,它在空间几何中有着广泛的应用,尤其是在计算机图形学和计算机视觉中。
一、什么是仿射变换先来看下什么是仿射变换。
简单地说,仿射变换是保持点之间的“比例关系”的变换,它是一种线性变换和平移变换的组合。
在二维平面中,一个仿射变换可以用一个$3\times3$的矩阵表示如下:$$\begin{bmatrix}s_{x}&r_{x}&t_{x}\\r_{y}&s_{y}&t_{y}\\0&0 &1\end{bmatrix}$$其中,$s_{x}$和$s_{y}$表示水平方向和垂直方向的缩放因子,$r_{x}$和$r_{y}$表示水平方向和垂直方向的倾斜,$t_{x}$和$t_{y}$表示水平方向和垂直方向的平移。
在三维空间中,一个仿射变换可以用一个$4\times4$的矩阵表示如下:$$\begin{bmatrix}s_{x}&r_{x}&p_{x}&t_{x}\\r_{y}&s_{y}&p_ {y}&t_{y}\\r_{z}&p_{z}&s_{z}&t_{z}\\0&0&0&1\end{bmatrix}$$其中,$s_{x}$、$s_{y}$和$s_{z}$表示三个方向的缩放因子,$r_{x}$、$r_{y}$和$r_{z}$表示绕三个坐标轴的旋转角度,$p_{x}$、$p_{y}$和$p_{z}$表示绕三个坐标轴的旋转中的剪切因子,$t_{x}$、$t_{y}$和$t_{z}$表示三个方向的平移量。
二、仿射变换的应用1. 计算机图形学在计算机图形学中,仿射变换可以用来实现图形的旋转、缩放、平移、剪切等操作。
比如,平移可以通过使用平移矩阵来实现:$$\begin{bmatrix}1&0&t_{x}\\0&1&t_{y}\\0&0&1\end{bmatrix} $$缩放可以通过使用缩放矩阵来实现:$$\begin{bmatrix}s_{x}&0&0\\0&s_{y}&0\\0&0&1\end{bmatrix} $$旋转可以通过使用旋转矩阵来实现:$$\begin{bmatrix}\cos\theta&-\sin\theta&0\\\sin\theta&\cos\theta&0\\0&0&1\end{bmatrix}$$等等。
仿射变换原理解析

平移仿射变换涉及将图形在二维平面内沿某一方向进行移动,而不改变图形之 间的相对位置和形状。这种变换通常由一个平移矩阵表示,其中包含平移向量 和单位矩阵。平移向量决定了图形移动的距离和方向。
旋转仿射变换
总结词
旋转仿射变换是围绕某一点旋转图形,同时保持图形之间的相对位置和形状不变。
详细描述
旋转仿射变换涉及将图形围绕某一点进行旋转,同时保持图形之间的相对位置和形状不变。这种变换通常由一个 旋转矩阵表示,其中包含旋转角度和旋转中心点坐标。旋转角度决定了图形旋转的角度,而旋转中心点坐标决定 了旋转的基准点。
缩放仿射变换
总结词
缩放仿射变换是改变图形的大小,同时保持图形之间的相对位置和形状不变。
详细描述
缩放仿射变换涉及将图形的大小进行缩放,同时保持图形之间的相对位置和形状不变。这种变换通常 由一个缩放矩阵表示,其中包含缩放因子和缩放中心点坐标。缩放因子决定了图形缩放的程度,而缩 放中心点坐标决定了缩放的基准点。
03
图像校正
通过仿射变换,可以将倾 斜的图像进行校正,使其 恢复水平或垂直状态。
图像拼接
在图像拼接过程中,可以 使用仿射变换将多张图像 进行对齐,实现无缝拼接。
特征点匹配
通过仿射变换,可以将不 同视角下的图像进行对齐, 便于特征点匹配和计算。
计算机图形学中的仿射变换
3D模型渲染
在3D模型渲染过程中,可以使用 仿射变换对模型进行旋转、缩放 和平移等操作,以实现各种视觉
THANKS.
仿射变换的基本性质
仿射变换不改变图形间的相对 位置和大小关系,即保持平行 性和等比例性。
仿射变换可以分解为一系列基 本变换的组合,如平移、旋转、 缩放等。
仿射变换可以保持直线的性质, 如直线的平行性和垂直性。
解析几何中的仿射与相似变换

解析几何中的仿射与相似变换解析几何是数学中一个重要的分支,研究的是平面和空间中的几何图形,其中涉及到各种各样的变换。
在解析几何中,仿射变换和相似变换是两个常见的变换类型,它们在几何图形的研究和应用中发挥着重要的作用。
一、仿射变换仿射变换是指保持直线平行性和直线上的点的比例关系的变换。
形式上,对于平面上的点P(x, y),经过仿射变换得到的新点P'(x', y')满足以下关系:x' = a1x + a2y + a3y' = b1x + b2y + b3其中a1、a2、a3、b1、b2、b3是常数,且a1b2 - a2b1 ≠ 0。
对于仿射变换,我们可以将其分解成平移、旋转、缩放和剪切四个基本变换的组合。
具体而言:1. 平移变换:平移变换将点P(x, y)移动到新的位置P'(x', y'),其中新位置与原位置的坐标之差为一个常量向量(v1, v2)。
对于平面上的点P(x, y),经过平移变换得到的新点P'(x', y')满足以下关系:x' = x + v1y' = y + v22. 旋转变换:旋转变换将点P(x, y)绕一个固定的点O(x0, y0)逆时针旋转θ弧度。
对于平面上的点P(x, y),经过旋转变换得到的新点P'(x', y')满足以下关系:x' = (x - x0)cosθ - (y - y0)sinθ + x0y' = (x - x0)sinθ + (y - y0)cosθ + y03. 缩放变换:缩放变换将点P(x, y)绕一个固定的点O(x0, y0)按照比例因子k进行缩放。
对于平面上的点P(x, y),经过缩放变换得到的新点P'(x', y')满足以下关系:x' = k(x - x0) + x0y' = k(y - y0) + y04. 剪切变换:剪切变换通过把点P(x, y)沿着某个方向按照比例因子k进行剪切。
仿射变换.
| AB | | BC || AC | | A' B ' | | B 'C ' || A'C ' | .
即A', B', C'仍然为共线三点且B'在A', C'之间. 若A, B, C不共线, 则必有
| AB | | BC || AC | | AB | | BC || AC |
即A', B', C'仍然为不共线三点.
x y
' '
a11x a21x
a12 a22
y y
a13 a23
或
x' y'
a1
a13 a23
.
(1.1)
其中(x, y)与(x', y')为的任一对对应点P, P'的坐标, 矩阵
A
a11 a21
a12
a22
称为的矩阵, 满足AAT=ATA=E, 为二阶正交矩阵.
注. 仿射变换的基本性质 (1) 使共线点变为共线点的双射; (2) 平行直线变为平行直线; (3) 保持共线三点的简单比, 从而保持两平行线段的比值不变.
仿射变换
定义 设为平面上的一个点变换, 满足 (1) 为一个使共线点变为共线点的双射; (2) 使得共线三点的简单比等于其对应共线三点的简单比; (3) 使得相互平行的直线变为相互平行的直线, 则称为上的一个仿射变换.
注 对于正交变换的矩阵A, 显然有A1=AT, 且|A|=1.
x
OPx OEx
( Px ExO)
y
OPy OEy
(PyEyO)
uuur OP xex yey.
仿射变换原理解析

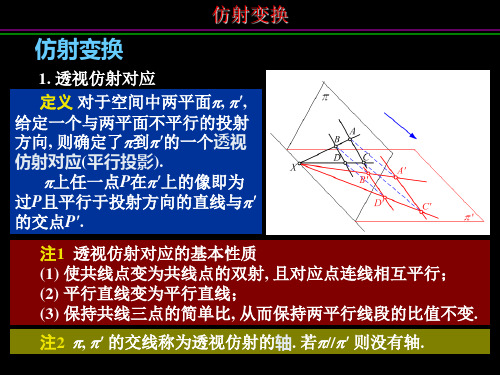
注2. , '的交线称为透视仿射b的轴. 若//'则没有轴.
1
仿射变换
2. 仿射变换
定义 对于空间中一组平面, 1, 2, …, n, ', 设以下对应均为
透视仿射对应:
0:1, 1:1 2, ..., n:n '
则称这n个透视仿射的积为到'的一个仿射对应. 若', 则称 为平面上的一个仿射变换.
换的定义有
|A B | |B C | |A C | |A 'B '| |B 'C '| |A 'C '| .
即A', B', C'仍然为共线三点且B'在A', C'之间. 若A, B, C不共线, 则必有
|A B | |B C | |A C | |A B | |B C | |A C |
||A A ''B B ''|| ||B B ''C C ''|| ||A A ''C C ''||
且|AB|=|A'B'|, |BC|=|B'C'|, |AC|=|A'C'|. 即ABCA'B'C', 于是,
B =B', 即正交变换保持两直线的夹角不变.
推论 (1) 正交变换使得一个三角形变为与其全等的三角形. 进而, 正交变换使得任何封闭图形变为与其全等的封闭图形, 使 得任何平面图形变为可以与其叠合(合同)的图形.
仿射变换
仿射变换
1. 透视仿射对应
定义 对于空间中两平面, ',
解析几何 仿射变换
解析几何是数学中的一个分支,研究了几何图形在坐标系中的表示和性质。
而仿射变换是解析几何中的一个重要概念,它描述了几何图形在平移、旋转、缩放等变换下的性质和关系。
仿射变换是指在二维或三维空间中,通过平移、旋转、缩放、错切等操作,将一个几何图形映射到另一个几何图形的变换。
它保持了几何图形的平行性、共线性和比例性质,因此在很多几何问题的研究和应用中具有重要作用。
在二维空间中,仿射变换可以用矩阵表示。
设原始图形的坐标为(x, y),经过仿射变换后的坐标为(x', y'),则可以表示为如下的矩阵形式:```[x'] [a b] [x] [e][y'] = [c d] * [y] + [f][1 ] [0 0] [1] [1]```其中,矩阵的左上角2x2部分表示旋转、缩放、错切等线性变换;右侧的列向量表示平移变换。
仿射变换具有许多重要的性质和应用。
首先,仿射变换可以保持几何图形的形状、大小和相对位置关系。
例如,通过平移可以将一个图形移动到另一个位置,通过旋转可以改变图形的朝向,通过缩放可以调整图形的大小。
其次,仿射变换可以用来解决许多几何问题。
例如,通过仿射变换可以计算两个几何图形之间的距离、角度、相交关系等。
它也可以用来生成各种特殊形状的图形,如椭圆、双曲线等。
此外,仿射变换还在计算机图形学、计算机视觉等领域中得到广泛应用。
通过仿射变换,可以实现图像的旋转、平移、缩放等操作,从而实现图像的处理和变换。
在计算机视觉中,仿射变换可以用来进行图像的校正、配准等操作。
总之,仿射变换是解析几何中的一个重要概念,它描述了几何图形在平移、旋转、缩放等变换下的性质和关系。
通过仿射变换,我们可以研究和解决许多几何问题,实现图形的处理和变换。
在实际应用中,仿射变换在计算机图形学、计算机视觉等领域中具有广泛的应用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例7 设σ是平面上由 v =(a,b)决定的平移,τ是平面上的
转角为θ的绕原点的旋转,
τσ:P(x,y)
P″(x″,y″)
P'(x',y'),则τσ的公式为:,
x' cos sin x cos sin x a
y'
sin
cos
y
sin
cos
y
b
cos sin x a cos bsin
单射又是满射的映射称为双射(或1—1对应)。
定义1.2 设映射 1 :S→S’, 2 :S’→S″,则定义乘积映射
为 21 : S S, 21 a 2 1 a, a S
对于S到S’的双射σ,我们可以定义它的逆映射 1 :
若σ(a)=a’∈S’,a∈S,则定义 1 (a) a ,显然,
(1) 恒等1变换GI,∈G2 ; G, 1 2 G;
(2) 若
则 1 G.
(3) 若σ∈G,则它的逆变换
。
则称G为S的一个变换群。
§2 平面的正交变换
1.平面的正交变换 在§1中我们介绍了平面上的三种点变换:平移、旋转和反
射。它们有一个共同的特点:保持点之间的距离不变。 定义2.1 平面上的一个点变换,如果保持点之间的距离不 变,
面上以 l 为轴的反射。若取 l 为x轴建立平面y直角坐标系,设
P(x,y),P'(x',y'),则此反射表示为
x' y'
1 0
01
x y
o (1.3)
P P x
设σ:S→S S’,我S '们用σ(S)表示S中的点在σ下的象的全体,
显然有
。
当σ(S)=S'时,则称σ是满射或到上的。如果在映射σ
下,S中不同元素的象也不同,则称σ是单射(或1—1的)。既是
第5章 正交变换和放射变换
• §1 变换 • §2 平面的正交变换 • §3 平面的仿射变换 • §4二次曲线的度量分类与仿射分类 • §5 空间的正交变换与仿射变换
§1 映射与变换 定义1.1 设S与S’是两个集合,对S中任一元素a,按某一法 则在S'中有唯一的元素a'与之对应,我们称此法则(即对应关 系) 为S到S'的一个映射。记作
x' y'
cos sin
sin cos
x y
(1.2)
y
P'
其中,θ是一确定的实数,
P
则τ是S上的一个变换,称
o
x
为平面绕原点的旋转,转角为θ。
(1.2)称为平面上转角为θ的旋转公式。
例6 平面上的反射。设l 是平面上一条定直线,平面上任 一
点P关于l 的对称点为 P’。这种从P点到P’点的映射,称为平
τ(n)=4n,n∈S,也是S到S'中的一个映射。
例2 设S是无数个点的集合,A是S的子集,S’={0,1}。
则定义为
a
1 0
a A
aA
的法则σ是S到S'上的一个映射。
例3 设S = S ',法则 I 定义为 a a, a∈S,则 I 是S到自身
的一个变换,此映射称为恒等变换。
例4 平面上的平移 设S是平面上所有点的集合,取定一个直
角坐标系,给定uu一ur个向量v =(a, b)。令点P(x,y)与P’(x’,y’)的 对应关系为 PP' v
则有
x' x a
y
'
yb
(1.1)
这是S到自身的一个变换,称为由 v 决定的平移。公式(1.1)
称为平面上的点的平移公式。
yv
注:在形式上平移公式与点的
P'
坐标变换中的移轴公式类似, 但是含意却完全不同:点的平 移公式中,(x,y)和(x’,y’)是不同
则称它是正交(点)变换(或等距变换)。 平面上的运动与反射都是正交变换。 从定义立即得到性质1和性质2。 性质1 恒等变换是正交变换。 性质2 正交变换的乘积是正交变换。
性质3 正交变换是双射。 证明 设σ是正交变换,把不同的两点P,Q分别变为P’和Q’。
由于P,Q不相同,所以 PQ 0,根据σ保持距离不变,应有 P'Q' | PQ | 0 , 因此,P',Q'也是不同的两点,即σ为单射。
sin
cos
y
a
sin
b
cos
: P x, y P"
x", y"
P'
x', y'
则στ的公式为:由
x' 1
y'
0
0 x" a 1
1
y"
b
0
0 cos 1 sin
sin x acos Nhomakorabeay
b
cos sin x a
sin
cos
y
b
此可见στ≠τσ。
oP
x
的 两 个 点 在 同 一 坐 标 系 中 的 坐 标 ; 而 移 轴 公 式 中 ,(x,y) 和 (x',y')是同一个点在两个不同的坐标系中的坐标。
例5 平面上的旋转 S是平面上所有点的集合,在平面上取定
一个直角坐标系{O;e1 , e2},令点P(x,y)和P’(x’,y’)的对应
关系τ为
σ:S→S',
a a'. 或者记作:a’=σ(a),a∈S。a’称为a在映射σ下的象,a称为 a'在σ下的一个原象。 集合S到S'的两个映射σ和τ称为相等,如果对于任意a∈S, 都有σ(a)=τ(a)。 集合S到自身的一个映射叫做S的一个变换。
例1 设S是全体自然数集,S’={±n|n∈S},则
σ(n)=2n,n∈S,是S到S’中的一个映射。
下证σ是满射。即对平面上任何一点P’,都存在P,使
σ(P)=P’。为此,在平面上任取不共线的三点 Pi(i=1,2,3),设
σ(P)i= Pi('i=1,2,3)。由σ是单射并保持距离不变,易知 P构i' 成
一个三角形,且⊿ P1 P2 P3 ≌⊿ P1'P2'P3'
平面上点变成点的变换也叫点变换。
一个线性点变换
x' y'
a11 a21
a12 a22
x y
a b,
当它的变换矩阵
A
a11 a12
a21
a22
的行列式|A|≠0时,称为满秩线
性点变换或非退化线性点变换。往后将看到,正交变换和仿 射
变换在代数上均表现为非退化的线性变换。
定义1.4 设G={σ:S→S|σ是S上的变换},如果G满足:
1 Is; S S;1 Is' ; S' S'.
易证,1—1对应的逆映射也是1—1对应,1—1对应的乘积 也是 1—1对应,映射的乘法满足结合律。
定义1.3 设σ:S→S是一变换,若对a∈S,满足σ(a)=a,则称 a是σ的不动点,{a∈S|σ(a)=a}称为σ的不动点集。
平面上的平移与旋转的乘积称为平面上的运动(即刚体运 动),它是平面到自身上的1—1变换。