机械原理matlab编程
matlab液压马达控制编程案例
matlab液压马达控制编程案例液压马达是一种将液压能转化为机械能的装置,广泛应用于工业生产中。
为了实现对液压马达的精确控制,我们可以利用Matlab进行编程,实现对液压马达的控制。
首先,我们需要了解液压马达的工作原理。
液压马达通过液压油的流动来驱动转子旋转,从而产生机械能。
液压马达的转速和扭矩可以通过控制液压油的流量和压力来实现。
在Matlab中,我们可以利用Simulink工具箱来进行液压马达的控制编程。
首先,我们需要建立一个模型来描述液压马达的动态特性。
可以使用Simulink中的传输线模块来模拟液压油的流动,使用旋转机械模块来模拟液压马达的转子旋转。
接下来,我们需要确定控制液压马达的目标。
例如,我们可以设置一个期望的转速和扭矩值,然后通过调节液压油的流量和压力来实现这些目标。
可以使用Simulink中的PID控制器模块来实现对液压马达的控制。
在编程过程中,我们还需要考虑到液压马达的动态响应特性。
液压马达的转速和扭矩响应时间较长,因此在控制过程中需要考虑到这些延迟。
可以使用Simulink中的延迟模块来模拟液压马达的响应延迟。
最后,我们可以通过Matlab的仿真功能来验证我们的控制策略。
可以设置不同的输入信号,例如阶跃信号或正弦信号,来测试液压马达的控制性能。
通过观察输出信号的响应,我们可以评估控制策略的有效性。
总之,利用Matlab进行液压马达控制编程可以帮助我们实现对液压马达的精确控制。
通过建立模型、设置控制目标、考虑动态响应特性以及进行仿真验证,我们可以设计出高效的液压马达控制策略。
这对于提高工业生产的效率和质量具有重要意义。
matlab平面连杆结构分析(机械原理课程设计)

优化参数:连杆 长度、角度、质 量等
优化结果:得到 最优的连杆结构 设计
感谢观看
汇报人:
平面连杆结构的应用范围
机械工程:用于设计、分析和优化机械设 备
生物医学:用于设计、分析和优化假肢、 康复设备等
航空航天:用于设计、分析和优化飞机、 火箭等航天器
机器人技术:用于设计、分析和优化机器 人关节、机械臂等
汽车工业:用于设计、分析和优化汽车底 盘、悬挂系统等
建筑工程:用于设计、分析和优化建筑结 构、桥梁等
03
平面连杆结构的运动学分析
平面连杆结构的运动学方程
平面连杆结构的运动学方程是描述连杆系统运动状态的数学模型 运动学方程包括位移方程、速度方程和加速度方程 运动学方程的建立需要知道连杆系统的几何参数和运动参数 运动学方程的求解可以通过数值积分方法或解析方法进行
平面连杆结构的运动学特性
运动学方程:描述连杆结构的运动状态 运动学参数:包括位移、速度、加速度等 运动学约束:限制连杆结构的运动范围 运动学仿真:通过计算机模拟连杆结构的运动过程
平面连杆结构的形状优化
优化目标:提 高连杆结构的 稳定性和刚度
优化方法:有 限元分析、拓
扑优化等
优化参数:连 杆的长度、宽
度、厚度等
优化效果:提 高连杆结构的 承载能力和使
用寿命
平面连杆结构的拓扑优化
拓扑优化:通过改变材料的分布和形状, 约束条件:结构的刚度、强度、稳定
以实现最优的结构性能
性等性能要求
目标函数:最小化重量或体积,同时 满足给定的性能要求
优化方法:遗传算法、粒子群算法、 模拟退火算法等
设计变量:材料的分布和形状
应用领域:汽车、航空航天、机械制 造等
机械原理课程设计matlab程序及成果图

Wjr_main.m%1.输入已知数据clear;l2=0.1605;%AB的长度单位ml4=0.6914;%CD的长度单位ml5=0.2074;%DE的长度单位ml1=0.370;%AC的长度单位ml1p=0.6572;%CF的长度单位momg2=8.378;af2=0;hd=pi/180;du=180/pi;%2.调用子函数abc.m计算牛头刨机构位移,角速度,角加速度for n1=1:689;tt2(n1)=-0.4488+(n1-1)*hd;ll=[l2,l4,l5,l1,l1p];[tt,omg,af]=abc(tt2(n1),omg2,af2,ll);s4(n1)=tt(1);tt4(n1)=tt(2);tt5(n1)=tt(3);sE(n1)=tt(4);v34(n1)=omg(1);omg4(n1)=omg(2);omg5(n1)=omg(3);vE(n1)=omg(4);a3(n1)=af(1);af4(n1)=af(2);af5(n1)=af(3);aE(n1)=af(4);end%3.位移,角速度,角加速度figure(1);n1=1:689;t=(n1-1)*pi/180;subplot(2,2,1); %绘角位移及位移线图plot(t,tt4*du,'r-.');grid on;hold on;axis auto;[haxes,hline1,hine2]=plotyy(t,tt5*du,t,sE);grid on;hold on;xlabel('时间/份');axes(haxes(1));ylabel('角位移/\circ');axes(haxes(2));ylabel('位移/m');hold on;grid on;text(1.15,-0.65,'tt_4');text(3.4,0.27,'tt_5');text(2.25,-0.15,'s_E');subplot(2,2,2); %绘角速度及速度线图plot(t,omg4,'r-.');grid on;hold on;axis auto;[haxes,hline1,hline2]=plotyy(t,omg5,t,vE); grid on;hold on;xlabel('时间/份')axes(haxes(1));ylabel('角速度/rad\cdots^{-1}')axes(haxes(2));ylabel('速度/m\cdots^{-1}')hold on;grid on;text(3.1,0.35,'\omg_4')text(2.1,0.1,'\omg_5')text(5.5,0.45,'v_E')subplot(2,2,3); %绘角加速度和加速度图plot(t,af4,'r-.');grid on;hold on;axis auto;[haxes,hline1,hline2]=plotyy(t,af5,t,aE); grid on;hold on;xlabel('时间/份')axes(haxes(1));ylabel('角加速度/rad\cdots^{-2}')axes(haxes(2));ylabel('加速度/m\cdots^{-2}')hold on;text(1.5,0.3,'\af_4')text(3.5,0.51,'\af_5')text(1.5,-0.11,'a_E')wjr_abc.mfunction[tt,omg,af]=abc(tt2,omg2,af2,ll)l2=ll(1);l4=ll(2);l5=ll(3);l1=ll(4);l1p=ll(5);%1.计算角位移和线位移s4=sqrt((l2*cos(tt2))*(l2*cos(tt2))+(l1+l2*sin(tt2))*(l1+l2*sin(tt2))); tt4=acos((l2*cos(tt2))/s4);tt5=asin((l1p-l4*sin(tt4))/l5);sE=l4*cos(tt4)+l5*cos(tt5);tt(1)=s4;tt(2)=tt4;tt(3)=tt5;%2.计算角速度和线速度A=[cos(tt4),-s4*sin(tt4),0,0; %速度分析矩阵之从动件位置参数矩阵sin(tt4),s4*cos(tt4),0,0;0,-l4*sin(tt4),-l5*sin(tt5),-1;0,l4*cos(tt4),l5*cos(tt5),0];B=[-l2*sin(tt2); %原动件位置参数矩阵l2*cos(tt2);0;0];omg=A\(omg2*B);v34=omg(1);omg4=omg(2);omg5=omg(3);vE=omg(4);%计算角加速度和加速度A=[cos(tt4),-s4*sin(tt4),0,0; %速度分析矩阵之从动件位置参数sin(tt4),s4*cos(tt4),0,0;0,-l4*sin(tt4),-l5*sin(tt5),-1;0,l4*cos(tt4),l5*cos(tt5),0];At=[-omg4*sin(tt4),-v34*sin(tt4)-s4*omg4*cos(tt4),0,0;omg4*cos(tt4),v34*cos(tt4)-s4*omg4*sin(tt4),0,0;0,-l4*omg4*cos(tt4),-l5*omg5*cos(tt5),0;0,-l4*omg4*sin(tt4),-l5*omg5*sin(tt5),0];Bt=[-l2*omg2*cos(tt2);-l2*omg2*sin(tt2);0;0];af=A\(-At*omg+omg2*Bt);a34=af(1);af4=af(2);af5=af(3);aE=af(4);wjr_force.m%1.输入已知数据clear;l2=0.1605;%AB的长度单位ml4=0.6914;%CD的长度单位ml5=0.2074;%DE的长度单位ml1=0.370;%AC的长度单位ml1p=0.6572;%CF的长度单位momg2=8.378;%单位rad/shd=pi/180;du=180/pi;H=0.6;%行程单位msEmax=0.5046; sEmin=0.0954;%单位mJs4=0.9; Js5=0.015;%单位kgm^2g=9.8;%单位m/s^2m4=22; m5=3; m6=52;%kgG4=196; G5=29.4; G6=509.6;%单位NFc=1400;%2.机构运动分析% 位移及角位移for n1=1:689;tt2(n1)=-0.4488+(n1-1)*hd;s4(n1)=sqrt((l2*cos(tt2(n1)))*(l2*cos(tt2(n1)))+(l1+l2*sin(tt2(n1)))*(l1+l2 *sin(tt2(n1))));tt4(n1)=acos((l2*cos(tt2(n1)))/s4(n1));tt5(n1)=asin((l1p-l4*sin(tt4(n1)))/l5);sE(n1)=l4*cos(tt4(n1))+l5*cos(tt5(n1));end%2.计算角速度和线速度for n1=1:689;A=[cos(tt4(n1)),-s4(n1)*sin(tt4(n1)),0,0; %速度分析矩阵之从动件位置参数sin(tt4(n1)),s4(n1)*cos(tt4(n1)),0,0;0,-l4*sin(tt4(n1)),-l5*sin(tt5(n1)),-1;0,l4*cos(tt4(n1)),l5*cos(tt5(n1)),0];B=[-l2*sin(tt2(n1)); %原动件位置参数矩阵l2*cos(tt2(n1));0;0];omg=A\(omg2*B);v34(n1)=omg(1);omg4(n1)=omg(2);omg5(n1)=omg(3);vE(n1)=omg(4);%计算角加速度和加速度A=[cos(tt4(n1)),-s4(n1)*sin(tt4(n1)),0,0; %速度分析矩阵之从动件位置参数sin(tt4(n1)),s4(n1)*cos(tt4(n1)),0,0;0,-l4*sin(tt4(n1)),-l5*sin(tt5(n1)),-1;0,l4*cos(tt4(n1)),l5*cos(tt5(n1)),0];At=[-omg4(n1)*sin(tt4(n1)),-v34(n1)*sin(tt4(n1))-s4(n1)*omg4(n1)*cos(tt4(n1)),0,0;omg4(n1)*cos(tt4(n1)),v34(n1)*cos(tt4(n1))-s4(n1)*omg4(n1)*sin(tt4(n1 )),0,0;0,-l4*omg4(n1)*cos(tt4(n1)),-l5*omg5(n1)*cos(tt5(n1)),0;0,-l4*omg4(n1)*sin(tt4(n1)),-l5*omg5(n1)*sin(tt5(n1)),0];Bt=[-l2*omg2*cos(tt2(n1));-l2*omg2*sin(tt2(n1));0;0];af=A\(-At*omg+omg2*Bt);a34(n1)=af(1);af4(n1)=af(2);af5(n1)=af(3);aE(n1)=af(4);end%3.机构的力平衡计算for n1=1:689;%计算各铰链点坐标xa=0;ya=l1;xb(n1)=l2*cos(tt2(n1));yb(n1)=l1+l2*sin(tt2(n1));xc=0;yc=0;xd(n1)=l4*cos(tt4(n1));yd(n1)=l4*sin(tt4(n1));xe(n1)=sE(n1);ye=l1p;%计算各质心坐标xs4(n1)=(xc+xd(n1))/2;ys4(n1)=(yc+yd(n1))/2;xs5(n1)=(xd(n1)+xe(n1))/2;ys5(n1)=(yd(n1)+ye)/2;xs6=0.15;%各质心点加速度as4x(n1)=-l4*(af4(n1)*sin(tt4(n1))+omg4(n1)^2*cos(tt4(n1)))/2;as4y(n1)=l4*(af4(n1)*cos(tt4(n1))-omg4(n1)^2*sin(tt4(n1)))/2;adx=-l4*(af4(n1)*sin(tt4(n1))+omg4(n1)^2*cos(tt4(n1)));ady=l4*(af4(n1)*cos(tt4(n1))-omg4(n1)^2*sin(tt4(n1)));as5x(n1)=adx+l5*(af5(n1)*sin(tt5(n1))+omg5(n1)^2*cos(tt5(n1)))/2; as5y(n1)=ady+l5*(af5(n1)*cos(tt5(n1))-omg5(n1)^2*sin(tt5(n1)))/2; as6(n1)=aE(n1);%惯性力及惯性力矩F4x(n1)=-m4*as4x(n1);F4y(n1)=-m4*as4y(n1);F5x(n1)=-m5*as5x(n1);F5y(n1)=-m5*as5y(n1);F6(n1)=-m6*as6(n1);M4(n1)=-Js4*af4(n1);M5(n1)=-Js5*af5(n1);%未知力系数矩阵xya=zeros(15);xya(1,2)=-1;xya(1,4)=-1;xya(2,3)=-1;xya(2,5)=-1;xya(3,1)=1;xya(3,4)=yb(n1)-ya;xya(3,5)=xa-xb(n1);xya(4,4)=1;xya(4,6)=-1;xya(5,5)=1;xya(5,7)=-1;xya(6,6)=cos(tt4(n1));xya(6,7)=sin(tt4(n1));xya(7,6)=1; xya(7,8)=-1;xya(7,10)=-1;xya(8,7)=1;xya(8,9)=-1;xya(8,11)=-1;xya(9,6)=ys4(n1)-yb(n1);xya(9,7)=xb(n1)-xs4(n1);xya(9,8)=yc-ys4(n1); xya(9,9)=xs4(n1)-xc;xya(9,10)=yd(n1)-ys4(n1);xya(9,11)=xs4(n1)-xd(n1);xya(10,10)=1;xya(10,12)=-1;xya(11,11)=1;xya(11,13)=-1;xya(12,10)=ys5(n1)-yd(n1); xya(12,11)=xd(n1)-xs5(n1);xya(12,12)=ye-ys4(n1);xya(12,13)=xs5(n1)-xe(n1);xya(13,12)=1;xya(14,13)=1;xya(14,14)=-1;xya(15,13)=xs6;xya(15,15)=1;%已知力矩阵if vE(n1)<0&sE(n1)>=(sEmin+0.05*H)&sE(n1)<=(sEmax-0.05*H)D=[0;0;0;0;0;0;-F4x(n1);-F4y(n1)+G4;-M4(n1);-F5x(n1);-F4y(n1)+G5;-M5( n1);-Fc-F6(n1);G6;0;];elseD=[0;0;0;0;0;0;-F4x(n1);-F4y(n1)+G4;-M4(n1);-F5x(n1);-F4y(n1)+G5;-M5( n1);-F6(n1);G6;0;];end%未知力矩阵FR=inv(xya)*D;M2(n1)=FR(1);FR12x(n1)=FR(2);FR12y(n1)=FR(3);FR45x(n1)=FR(10);FR45y(n1)=FR(11);FR16(n1)=FR(14);M6(n1)=FR(15);end%4.输出力的分析图figure(2);n1=1:689;t=(n1-1)*2*pi/360;subplot(2,2,1); %绘平衡力矩图plot(t,M2);grid on;hold on;axis auto;title('平衡力矩M_2')xlabel('时间/份');ylabel('力矩/N\cdotm');hold on;grid on;text(3.8,880,'M_2');subplot(2,2,2); %绘A处x方向约束反力即FR12x plot(t,FR12x,'-');grid on;hold on;axis auto;title('转动副A处约束反力')xlabel('时间/份');ylabel('力/N');hold on;grid on;text(1.1,5000,'F_R_1_2_x')plot(t,FR12y,'r-.'); %绘A处y方向约束反力即FR12y grid on;hold on;text(1.1,-3000,'F_R_1_2_y')subplot(2,2,3); %绘移动副FR16plot(t,-FR16);grid on;hold on;axis auto;title('移动副6约束反力F_R_1_6')xlabel('时间/份')ylabel('力/N')grid on;hold on;text(1.5,3100,'F_R_1_6')subplot(2,2,4); %绘转动副D处约束反力plot(t,FR45x,'-');grid on;hold on;axis auto;title('转动副D处约束反力')xlabel('时间/份')ylabel('力/N')grid on;hold on;text(1.1,-900,'F_R_4_5_x')plot(t,FR45y,'r-.');grid on;hold on;text(1.1,-3700,'F_R_4_5_y')。
机械原理matlab编程
机械原理(Matlab绘图)专业班级学号姓名:图一:导杆的角位移曲线和刨刀的位移曲线x1=linspace(0,2*pi,100);l1=100;l3=360;l4=200;l6=200;y=336;w1=2*pi;x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));for i = 1 : 100;if x3(i)<0x3(i)=x3(i)+pi;endendS3=l1*cos(x1)./cos(x3);V23=(-1)*w1*l1*sin(x1-x3);w3=w1*l1*cos(x1-x3)./S3;a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;x4= atan((y-l3*sin(x3))./l4);Se=l3*cos(x3)+l4*cos(x4);w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,180*x3./pi,180*x1./pi,Se/1000);xlabel('x1/(°)'),ylabel('x3(°)');title('导杆的角位移曲线和刨刀的位移曲线');text(150,108,'x3');text(200,60,'Se');grid on;plotedit on;图二:导杆的角速度曲线和刨刀的速度曲线x1=linspace(0,2*pi,100);l1=100;l3=360;l4=200;l6=200;y=336;w1=2*pi;x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));for i = 1 : 100;if x3(i)<0x3(i)=x3(i)+pi;endendS3=l1*cos(x1)./cos(x3);V23=(-1)*w1*l1*sin(x1-x3);w3=w1*l1*cos(x1-x3)./S3;a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;x4= atan((y-l3*sin(x3))./l4);Se=l3*cos(x3)+l4*cos(x4);w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,w3,180*x1./pi,Ve/1000);xlabel('x1/(°)'),ylabel('w3(rad/s)');title('导杆的角速度曲线和刨刀的速度曲线');grid on;text(100,-5,'Ve');text(100,1.8,'w3');axis([0 400 -7 4]);plotedit on;图三:导杆的角加速度曲线和刨刀的加速度曲线x1=linspace(0,2*pi,100);l1=100;l3=360;l4=200;l6=200;y=336;w1=2*pi;x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));for i = 1 : 100;if x3(i)<0x3(i)=x3(i)+pi;endendS3=l1*cos(x1)./cos(x3);V23=(-1)*w1*l1*sin(x1-x3);w3=w1*l1*cos(x1-x3)./S3;a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;x4= atan((y-l3*sin(x3))./l4);Se=l3*cos(x3)+l4*cos(x4);w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,A3,180*x1./pi,ae/1000);xlabel('x1/(°)'),ylabel('A3(rad/s^2)'),grid;title('导杆的角加速度曲线和刨刀的加速度曲线');text(250,25,'ae');text(300,50,'A3');plotedit on;图四:凸轮从动件位移曲线h=20;F1=2*pi/3;F2=pi/2;i=1;for x=0:0.01:2*pi;if x>=0&x<=2*pi/3;S(i)=h*(1-cos(pi*x./F1))./2;elseif x>=2*pi/3&x<=pi;S(i)=h;elseif x>=pi&x<=5*pi/4;S(i)=h-2*h*(x-pi).^2./(F2.^2);elseif x>=5*pi/4 &x<=3*pi/2;S(i)= 2*h*(F2-x+pi).^2./(F2.^2); elseif x>=3*pi/2 &x<=2*pi;S(i)=0;endi=i+1;x=0:0.01:2*pi;plot(x,S);title('从动件位移曲线');axis([0 7 0 25]);xlabel('x/(rad)');ylabel('S/(mm)');grid on;图五:凸轮的理论轮廓曲线和实际轮廓曲线e=10;Rt=10;Rb=25;w=2*pi;F1=2*pi/3;F2=pi/2;i=1;for f=0:0.01:2*pi;if f>=0&f<=2*pi/3;S(i)=h*(1-cos(pi*f./F1))./2;elseif f>=2*pi/3&f<=pi;S(i)=h;elseif f>=pi&f<=5*pi/4;S(i)=h-2*h*(f-pi).^2./(F2.^2);elseif f>=5*pi/4 &f<=3*pi/2;S(i)= 2*h*(F2-f+pi).^2./(F2.^2);elseif f>=3*pi/2 &f<=2*pi;S(i)=0;endi=i+1;endf=0:0.01:2*pi;s0=sqrt((Rb.^2)-(e.^2));x =e*cos(f)+(s0+S).*sin(f);y =(s0+S).*cos(f)-e*sin(f);d1=e*(-1).*sin(f).*w+(s0+S).*cos(f).*w;d2=(s0+S).*sin(f).*(-1).*w-e*cos(f).*w;x1=x+Rt*d2./sqrt((d1.^2)+(d2.^2));y1=y-Rt*d1./sqrt((d1.^2)+(d2.^2));plot(x,y,'k-',x1,y1,'k-.');title('凸轮的理论轮廓曲线和实际轮廓曲线'); text(-10,-30,'实际轮廓曲线');text(-10,-40,'理论轮廓曲线');axis([-40 50 -55 40 ]);hold on;plot(0,0);text(0,-3,'O');。
机械原理matlab分析大作业3-28
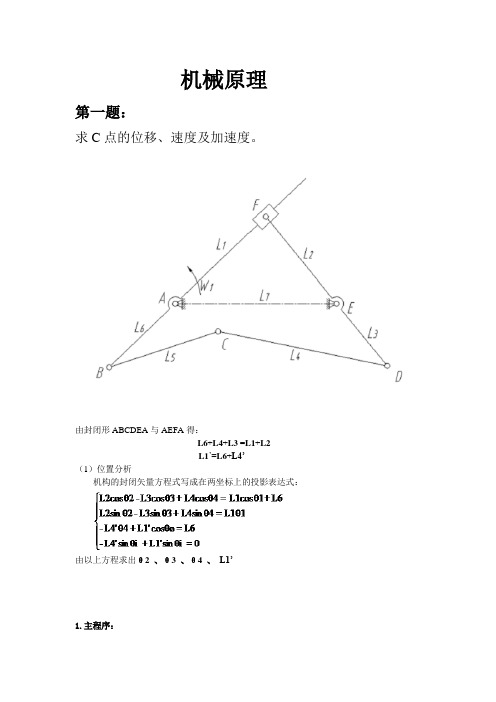
机械原理第一题:求C点的位移、速度及加速度。
由封闭形ABCDEA与AEFA得:L6+L4+L3 =L1+L2L1’=L6+L4’(1)位置分析机构的封闭矢量方程式写成在两坐标上的投影表达式:由以上方程求出θ2 、θ3 、θ4 、L1’1.主程序:%输入已知数据l2=60;l3=35;l4=75;l5=50;l6=40;l7=70;hd=pi/180;du=180/pi;omega1=10;alpha1=0;%调用子函数计算角位移,角速度及角加速度for n1=1:66 %曲柄转角范围theta1(n1)=(n1-1)*hd;ll=[l2,l3,l4,l5,l6,l7];[theta,omega,alpha]=six_bar(theta1(n1),omega1,ll);l1(n1)=theta(1);theta2(n1)=theta(2);theta4(n1)=theta(3);theta3(n1)=theta(4);v1(n1)=omega(1);omega2(n1)=omega(2);omega3(n1)=omega(3);omega4(n1)=omega(4);a1(n1)=alpha(1);alpha2(n1)=alpha(2);alpha3(n1)=alpha(3);alpha4(n1)=alpha(4);e nd%图像输出figure(1);n1=1:66;t=(n1-1)*2*pi/360;subplot(2,2,1);%滑块F线位移L1图像输出plot(theta1*du,l1,'k');title('L1线位移图');xlabel('角位移\theta_1/\circ')ylabel('线位移/mm')grid on;hold on;gtext('L1')pause(1);subplot(2,2,2);%theta2、theta3、theta4角位移图像输出plot(theta1*du,theta2*du,'g',theta1*du,theta3*du,'r',theta1*du,th eta4*du);title('\theta_2、\theta_3、\theta_4角位移图');xlabel('角位移\theta_1/\circ')ylabel('角位移/\circ')grid on;hold on;legend('\theta_2','\theta_3','\theta_4');pause(1);subplot(2,2,3);%滑块F的速度图像输出plot(theta1*du,v1,'k');title('滑块F的速度图');xlabel('角位移\theta_1/\circ')ylabel('速度/mm\cdots^{-1}')grid on;hold on;gtext('v1')pause(1);subplot(2,2,4);%滑块F的加速度图像输出plot(theta1*du,a1,'k');title('滑块F的加速度图');axis auto;xlabel('角位移\theta_1/\circ')ylabel('加速度/mm\cdots^{-2}')grid on;hold on;gtext('a1');pause(5);figure(2);subplot(1,2,1);%omega2、omega3和omega4角位移图像输出plot(theta1*du,omega2,'g',theta1*du,omega3,'r',theta1*du,omega4,' b');title('\omega_2、\omega_3、\omega_4角速度图');axis auto;grid on;hold on;xlabel('角位移\theta_1/\circ')ylabel('角速度/rad\cdots^{-1}')box on;legend('\omega_2','\omega_3','\omega_4');pause(1);subplot(1,2,2);%alpha2、alpha3和alpha4角加速度图像输出plot(theta1*du,alpha2,'g',theta1*du,alpha3,'r',theta1*du,alpha4,' b');title('\alpha_2、\alpha_3、\alpha_4角加速度图');axis auto;grid on;hold on;xlabel('角位移\theta_1/\circ')ylabel('角加速度/rad\cdots^{-2}')box on;legend('\alpha_2','\alpha_3','\alpha_4');pause(5);figure(3);xC=-l6*cos(theta1+pi)+l5*cos(theta3);yC=l6*sin(theta1+pi)+l5*sin(theta3);% rC=sqrt(xC.*xC+yC.yC)vCX=-omega1*l6*sin(theta1+pi)-omega3*l5.*sin(theta3);vCY=omega1*l6*cos(theta1+pi)+omega3*l5.*cos(theta3);% v3=sqrt(vCX.*vCX+vCY.*vCY);subplot(2,2,1);hold on;grid on;%C点x、y方向位移图像输出plot(theta1*du,xC,'r',theta1*du,yC);axis auto;hold on;grid on;title('C点位移图');xlabel('角位移\theta_1/\circ')ylabel('位移/mm')grid on;hold on;legend('xC','yC');pause(1);subplot(2,2,2);grid on;hold on;%C点x、y方向速度图像输出plot(theta1*du,vCX,'k',theta1*du,vCY);title('C点速度图');xlabel('角位移\theta_1/\circ')ylabel('速度/mm\cdots^{-1}')legend('vCX','vCY');pause(1);aCX=omega1*omega1*l6*cos(theta1)-omega3.*omega3.*l5.*cos(theta3)-alpha3.*l5.*sin(theta3);aCY=omega1*omega1*l6*sin(theta1)-omega3.*omega3.*l5.*sin(theta3)+ alpha3.*l5.*cos(theta3);%a3=sqrt(aCX.*aCX+aCY.*aCY);subplot(2,2,3);%C点x、y方向加速度图像输出plot(theta1*du,aCX,'r',theta1*du,aCY,'b');title('C点加速度图');grid on;hold on;xlabel('角位移\theta_1/\circ')ylabel('加速度/mm\cdots^{-2}')box on;legend('aCX','aCY');%主程序结束2.子程序:%子函数function[theta,omega,alpha]=six_bar(theta1,omega1,ll)l2=ll(1);l3=ll(2);l4=ll(3);l5=ll(4);l6=ll(5);l7=ll(6);%1.计算角位移和线位移l1=l7*cos(theta1)+sqrt((l7*cos(theta1))*(l7*cos(theta1))-l7*l7+l2 *l2);theta2=asin((l1*sin(theta1))/l2);A=2*l4*(l6*sin(theta1)-l3*sin(theta2).*sin(theta2));B=2*l4*(l6*cos(theta1)+l7-l3*cos(theta2));C=l4*l4-l5*l5+l6*l6+l7*l7+l3*l3-2*l3*l6*(cos(theta1)*cos(theta2)+ sin(theta1)*sin(theta1))-2*l7*l3*cos(theta2)+2*l6*l7*cos(theta1); theta4=2*atan((A+sqrt(A.*A+B.*B-C.*C))/(B-C));theta3=asin((l6*sin(theta1)+l4*sin(theta4)-l3*sin(theta2))/l5); theta(1)=l1;theta(2)=theta2;theta(3)=theta4;theta(4)=theta3;%2利用矩阵计算角速度和线速度D=[-l5*sin(theta3),l4*sin(theta4),-l3*sin(theta2+pi),0l5*cos(theta3),-l4*cos(theta4),-l3*cos(theta2+pi),00,0,l2*sin(theta2),cos(theta1)0,0,-l2*cos(theta2),sin(theta1)];E=[l6*sin(theta1+pi);-l6*cos(theta1+pi);l1*sin(theta1);-l1*cos(theta1)];omega=D\(omega1*E);v1=omega(4);omega2=omega(3);omega3=omega(1);omega4=omega(2);%3利用矩阵计算角加速度和加速度Dt=[-l5*omega3*cos(theta3),l4*omega4*cos(theta4),-l3*omega2*cos(t heta2),0-l5*omega3*sin(theta3),l4*omega4*sin(theta4),-l3*omega2*sin(theta 2),00,0,l2*omega2*cos(theta2),-omega1*sin(theta1)0,0,l2*omega2*sin(theta2),omega1*cos(theta1)];Et=[l6*omega1*cos(theta1);l6*omega1*sin(theta1);l1*omega1*cos(theta1)+v1*sin(theta1);l1*omega1*sin(theta1)-v1*cos(theta1)];alpha=D\(-Dt*omega+omega1*Et);a1=alpha(4);alpha2=alpha(3);alpha3=alpha(1);alpha4=alpha(2);%3子程序结束3.图像输出:%1.滑块F线位移L1图像输出%2.theta2、theta3、theta4角位移图像输出%3.滑块F的速度图像输出%4.滑块F的加速度图像输出%5.omega2、omega3和omega4角位移图像输出%6.alpha2、alpha3和alpha4角加速度图像输出%7.C点x、y方向位移图像输出%8.C点x、y方向速度图像输出%9.C点x、y方向加速度图像输出。
机械原理matlab课程设计

机械原理matlab课程设计一、教学目标本课程的学习目标主要包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握机械原理的基本概念、理论和方法;技能目标要求学生能够运用MATLAB软件进行机械系统仿真和分析;情感态度价值观目标要求学生培养创新意识、团队合作精神和自主学习能力。
通过本课程的学习,学生将能够:1.描述和解释机械原理的基本概念和理论。
2.使用MATLAB软件进行机械系统仿真和分析。
3.提出问题、解决问题并开展创新设计。
4.能够进行团队合作,共同完成项目任务。
二、教学内容教学内容将根据课程目标进行选择和,确保内容的科学性和系统性。
教学大纲将明确教学内容的安排和进度,指出教材的章节和列举内容。
主要内容包括:1.机械原理的基本概念和理论,包括力学、动力学、运动学等方面。
2.MATLAB软件的基本操作和功能,包括矩阵运算、绘图、编程等。
3.机械系统仿真的方法和技巧,包括模型建立、参数调整、结果分析等。
4.机械系统设计案例分析,包括机器人的运动控制、机构的优化设计等。
三、教学方法为了激发学生的学习兴趣和主动性,将采用多种教学方法。
包括讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过教师的讲解和演示,向学生传授基本概念和理论知识。
2.讨论法:学生进行小组讨论,促进学生之间的交流和思维碰撞。
3.案例分析法:通过分析实际案例,引导学生运用所学知识解决实际问题。
4.实验法:安排实验课程,让学生亲自动手进行实验操作和数据分析。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备适当的教学资源。
包括教材、参考书、多媒体资料和实验设备等。
1.教材:选择权威、实用的教材,作为学生学习的主要参考资料。
2.参考书:推荐一些相关的参考书籍,供学生深入学习和拓展知识。
3.多媒体资料:制作精美的PPT、教学视频等多媒体资料,增强课堂教学的趣味性和效果。
4.实验设备:准备必要的实验设备,让学生能够进行实际操作和验证。
机械原理matlab作业
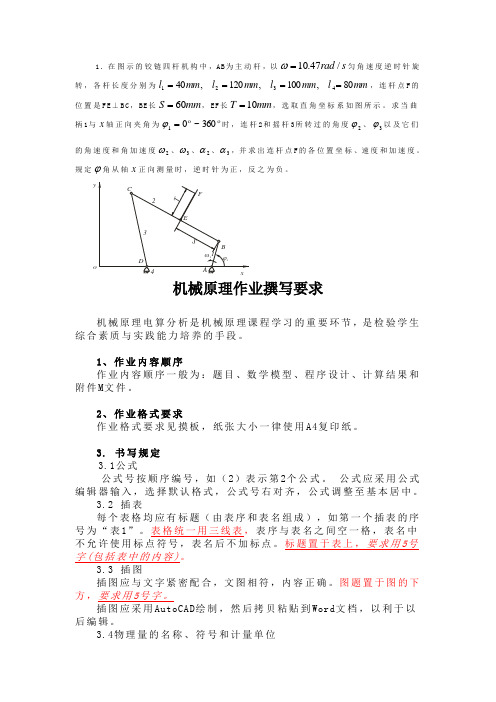
1.在图示的铰链四杆机构中,AB 为主动杆,以s rad /47.10=ω匀角速度逆时针旋转,各杆长度分别为mm l mm l mm l mm l 80,100,120,404321====,连杆点F 的位置是FE ⊥BC ,BE 长mm S 60=,EF 长mm T 10=,选取直角坐标系如图所示。
求当曲柄1与x 轴正向夹角为 360~01=ϕ时,连杆2和摇杆3所转过的角度2ϕ、3ϕ以及它们的角速度和角加速度2ω、3ω、2α、3α,并求出连杆点F 的各位置坐标、速度和加速度。
规定ϕ角从轴x 正向测量时,逆时针为正,反之为负。
y机械原理作业撰写要求机械原理电算分析是机械原理课程学习的重要环节,是检验学生综合素质与实践能力培养的手段。
1、作业内容顺序作业内容顺序一般为:题目、数学模型、程序设计、计算结果和附件M 文件。
2、作业格式要求作业格式要求见摸板,纸张大小一律使用A4复印纸。
3. 书写规定 3.1公式公式号按顺序编号,如(2)表示第2个公式。
公式应采用公式编辑器输入,选择默认格式,公式号右对齐,公式调整至基本居中。
3.2 插表每个表格均应有标题(由表序和表名组成),如第一个插表的序号为“表1”。
表格统一用三线表,表序与表名之间空一格,表名中不允许使用标点符号,表名后不加标点。
标题置于表上,要求用5号字(包括表中的内容)。
3.3 插图插图应与文字紧密配合,文图相符,内容正确。
图题置于图的下方,要求用5号字。
插图应采用AutoCAD 绘制,然后拷贝粘贴到Word 文档,以利于以后编辑。
3.4物理量的名称、符号和计量单位物理量的名称、符号和计量单位应统一按照机械原理教科书的规定书写,某一量的名称、符号和计量单位应与教科书的规定相一致。
4. 排版要求4.1正文字体要求、每部分标题左顶边、小三宋体加粗。
正文文字用宋体小四号汉字和四号“Times New Roman”英文字体,每自然段首行缩进2个字符。
matlab在机械原理中的应用实例
matlab在机械原理中的应用实例在机械原理中,MATLAB是一种常用的计算工具,可以应用于诸多领域,包括机械设计、力学分析、动力学仿真等。
下面将介绍几个MATLAB在机械原理中的应用实例。
1.机构设计与分析MATLAB可以用于机构的设计和分析,例如平面机构、空间机构、曲柄机构等。
它提供了多种机构建模方法,如刚体模型、柔性模型等。
利用MATLAB的强大计算能力和绘图功能,可以进行机构分析和优化。
例如,可以计算机构的运动学性能、动力学性能和静力学性能,并进行动态仿真。
2.动力学仿真MATLAB可以进行各种机械系统的动力学仿真,包括振动系统、运动系统和控制系统。
通过对机械系统建立微分方程或差分方程,利用MATLAB进行数值解求解,并绘制相应的图形,可以得到机械系统的响应。
例如,可以模拟机械系统的自由振动、强迫振动和阻尼振动等。
3.控制系统设计与分析MATLAB在机械原理中的应用还包括控制系统的设计与分析。
通过MATLAB中的控制系统工具箱,可以进行控制系统的模型建立、系统分析和控制器设计。
例如,可以利用MATLAB对机械系统进行稳定性分析、频域分析和时域分析,并设计相应的控制器,实现机械系统的控制。
4.声学分析MATLAB也可以用于机械系统的声学分析。
通过建立机械系统的声学模型,利用MATLAB进行声场分布和声压级分析。
可以计算机械系统的声辐射特性,例如机械振动引起的噪声。
同时,还可以进行声学优化设计,减少机械系统的噪声。
5.优化设计MATLAB在机械原理中广泛应用于优化设计。
通过建立数学模型和定义目标函数,利用MATLAB进行优化计算。
例如,可以利用MATLAB进行机械系统的拓扑优化、形状优化和尺寸优化,实现机械系统的性能优化。
同时,还可以利用MATLAB的优化算法进行参数优化和控制器设计。
综上所述,MATLAB在机械原理中具有广泛的应用,可以应用于机构设计与分析、动力学仿真、控制系统设计与分析、声学分析和优化设计等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理(Matlab绘图)
专业班级
学号
姓名:
图一:导杆的角位移曲线和刨刀的位移曲线
x1=linspace(0,2*pi,100);
l1=100;
l3=360;
l4=200;
l6=200;
y=336;
w1=2*pi;
x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));
for i = 1 : 100;
if x3(i)<0
x3(i)=x3(i)+pi;
end
end
S3=l1*cos(x1)./cos(x3);
V23=(-1)*w1*l1*sin(x1-x3);
w3=w1*l1*cos(x1-x3)./S3;
a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);
A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;
x4= atan((y-l3*sin(x3))./l4);
Se=l3*cos(x3)+l4*cos(x4);
w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));
Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);
A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,180*x3./pi,180*x1./pi,Se/1000);
xlabel('x1/(°)'),ylabel('x3(°)');
title('导杆的角位移曲线和刨刀的位移曲线');
text(150,108,'x3');
text(200,60,'Se');
grid on;
plotedit on;
图二:导杆的角速度曲线和刨刀的速度曲线x1=linspace(0,2*pi,100);
l1=100;
l3=360;
l4=200;
l6=200;
y=336;
w1=2*pi;
x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));
for i = 1 : 100;
if x3(i)<0
x3(i)=x3(i)+pi;
end
end
S3=l1*cos(x1)./cos(x3);
V23=(-1)*w1*l1*sin(x1-x3);
w3=w1*l1*cos(x1-x3)./S3;
a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);
A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;
x4= atan((y-l3*sin(x3))./l4);
Se=l3*cos(x3)+l4*cos(x4);
w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));
Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);
A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,w3,180*x1./pi,Ve/1000);
xlabel('x1/(°)'),ylabel('w3(rad/s)');
title('导杆的角速度曲线和刨刀的速度曲线');
grid on;
text(100,-5,'Ve');
text(100,1.8,'w3');
axis([0 400 -7 4]);
plotedit on;
图三:导杆的角加速度曲线和刨刀的加速度曲线
x1=linspace(0,2*pi,100);
l1=100;
l3=360;
l4=200;
l6=200;
y=336;
w1=2*pi;
x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));
for i = 1 : 100;
if x3(i)<0
x3(i)=x3(i)+pi;
end
end
S3=l1*cos(x1)./cos(x3);
V23=(-1)*w1*l1*sin(x1-x3);
w3=w1*l1*cos(x1-x3)./S3;
a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);
A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;
x4= atan((y-l3*sin(x3))./l4);
Se=l3*cos(x3)+l4*cos(x4);
w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));
Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);
A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,A3,180*x1./pi,ae/1000);
xlabel('x1/(°)'),ylabel('A3(rad/s^2)'),grid;
title('导杆的角加速度曲线和刨刀的加速度曲线');
text(250,25,'ae');
text(300,50,'A3');
plotedit on;
图四:凸轮从动件位移曲线h=20;
F1=2*pi/3;
F2=pi/2;
i=1;
for x=0:0.01:2*pi;
if x>=0&x<=2*pi/3;
S(i)=h*(1-cos(pi*x./F1))./2;
elseif x>=2*pi/3&x<=pi;
S(i)=h;
elseif x>=pi&x<=5*pi/4;
S(i)=h-2*h*(x-pi).^2./(F2.^2);
elseif x>=5*pi/4 &x<=3*pi/2;
S(i)= 2*h*(F2-x+pi).^2./(F2.^2); elseif x>=3*pi/2 &x<=2*pi;
S(i)=0;
end
i=i+1;
x=0:0.01:2*pi;
plot(x,S);
title('从动件位移曲线');
axis([0 7 0 25]);
xlabel('x/(rad)');
ylabel('S/(mm)');
grid on;
图五:凸轮的理论轮廓曲线和实际轮廓曲线
e=10;
Rt=10;
Rb=25;
w=2*pi;
F1=2*pi/3;
F2=pi/2;
i=1;
for f=0:0.01:2*pi;
if f>=0&f<=2*pi/3;
S(i)=h*(1-cos(pi*f./F1))./2;
elseif f>=2*pi/3&f<=pi;
S(i)=h;
elseif f>=pi&f<=5*pi/4;
S(i)=h-2*h*(f-pi).^2./(F2.^2);
elseif f>=5*pi/4 &f<=3*pi/2;
S(i)= 2*h*(F2-f+pi).^2./(F2.^2);
elseif f>=3*pi/2 &f<=2*pi;
S(i)=0;
end
i=i+1;
end
f=0:0.01:2*pi;
s0=sqrt((Rb.^2)-(e.^2));
x =e*cos(f)+(s0+S).*sin(f);
y =(s0+S).*cos(f)-e*sin(f);
d1=e*(-1).*sin(f).*w+(s0+S).*cos(f).*w;
d2=(s0+S).*sin(f).*(-1).*w-e*cos(f).*w;
x1=x+Rt*d2./sqrt((d1.^2)+(d2.^2));
y1=y-Rt*d1./sqrt((d1.^2)+(d2.^2));
plot(x,y,'k-',x1,y1,'k-.');
title('凸轮的理论轮廓曲线和实际轮廓曲线'); text(-10,-30,'实际轮廓曲线');
text(-10,-40,'理论轮廓曲线');
axis([-40 50 -55 40 ]);
hold on;
plot(0,0);
text(0,-3,'O');。