平衡车专用无刷电机驱动电路原理图
电动车无刷控制器原理图

电动车无刷控制器原理图(mc33033) 2007/05/04 01:0048V500W有刷电摩控制器电原理图2007/05/15 17:13几款有刷电动自行车控制器2007/05/14 03:51伟星有刷电机控制器图片看不清者,可以右键另存为在本机上查看一款带继电器的有刷电机控制器ZKC3615MZ有刷电机控制器新旭WMB型24V280W有刷电机控制器电动车充电器原理及维修常用电动车充电器根据电路结构可大致分为两种。
第一种是以u c3842驱动场效应管的单管开关电源,配合LM358双运放来实现三阶段充电方式。
其电原理图和元件参数见图表1点击图片在新窗口查看清晰大图图表1工作原理:220v交流电经T0双向滤波抑制干扰,D1整流为脉动直流,再经C11滤波形成稳定的300V左右的直流电。
U1 为TL3842脉宽调制集成电路。
其5脚为电源负极,7脚为电源正极,6脚为脉冲输出直接驱动场效应管Q1(K1358) 3脚为最大电流限制,调整R25(2.5欧姆)的阻值可以调整充电器的最大电流。
2脚为电压反馈,可以调节充电器的输出电压。
4脚外接振荡电阻R1,和振荡电容C1。
T1为高频脉冲变压器,其作用有三个。
第一是把高压脉冲将压为低压脉冲。
第二是起到隔离高压的作用,以防触电。
第三是为uc3842提供工作电源。
D4为高频整流管(16A60V)C10为低压滤波电容,D5为12V稳压二极管, U3(TL431)为精密基准电压源,配合U2(光耦合器4N35) 起到自动调节充电器电压的作用。
调整w2(微调电阻)可以细调充电器的电压。
D10是电源指示灯。
D6为充电指示灯。
R27是电流取样电阻(0.1欧姆,5w)改变W1的阻值可以调整充电器转浮充的拐点电流(200-300 mA)通电开始时,C11上有300v左右电压。
电动车无刷控制器电路图(高清)

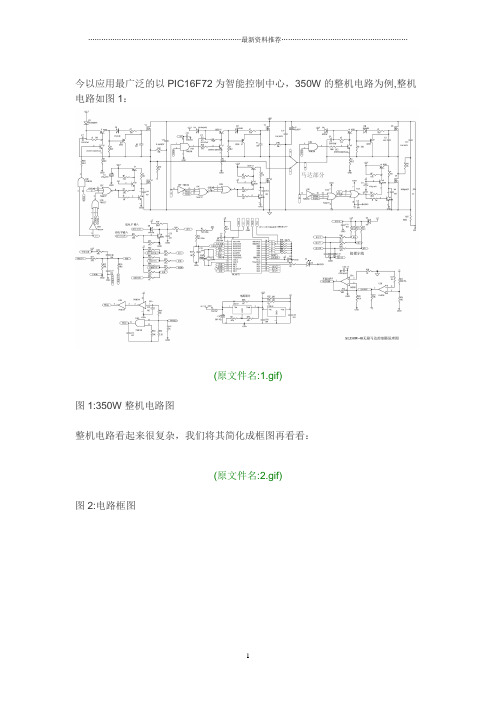
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1 :(原文件名:1.gif)图1:350W 整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图种旌用制肌抽输扎 ©卫再想罟输入电路大体上可以分成五部分:一、 电源稳压,供应部分;二、 信号输入与预处理部分;三、 智能信号处理,控制部分;四、 驱动控制信号预处理部分;五、 功率驱动开关部分。
下面我们先来看看此电路最核心的部分: PIC16F72组成的单片机智能处理、控 制部分,因为其他电路都是为其服务或被其控制, 弄清楚这部分,其它电路就比 较容易明白。
唯丿;机冲沖I「心 7\ 电從放嵐部井 『朕世述*扎剧喉输入PtC'l4FT2(原文件名:3.gif )图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电 源、复位、振荡器等,共有22个可复用的IO 口,其中第13脚是CCP1输出口, 可输出最大分辨率达10BIT 的可调PWM 信号,另有AN0-AN4共5路AD 模数 转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事 件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:I : MCLR 复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行 A-D 转换后 经过运算来控制PWM 的输出,使电流不致过大而烧毁功率管。
正常运转时电压 应在0-1.5V 左右 3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行 A-D 转换 后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而 损坏。
正常时电压应在3V 以上4 :模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高 低来控制输出给电机的总功率,从而达到调整速度的目的。
电动车无刷控制器电路图(高清)精编版
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
电动车无刷控制器电路图[高清]
![电动车无刷控制器电路图[高清]](https://img.taocdn.com/s3/m/f9a2d322df80d4d8d15abe23482fb4daa48d1d43.png)
电动车无刷控制器电路图[高清]今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
「图解」电动车无刷电机控制器驱动电路图
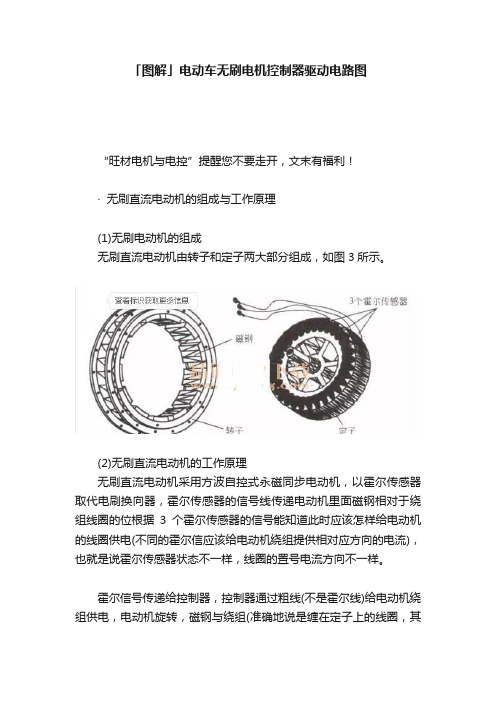
「图解」电动车无刷电机控制器驱动电路图“旺材电机与电控”提醒您不要走开,文末有福利!·无刷直流电动机的组成与工作原理(1)无刷电动机的组成无刷直流电动机由转子和定子两大部分组成,如图3所示。
(2)无刷直流电动机的工作原理无刷直流电动机采用方波自控式永磁同步电动机,以霍尔传感器取代电刷换向器,霍尔传感器的信号线传递电动机里面磁钢相对于绕组线圈的位根据3个霍尔传感器的信号能知道此时应该怎样给电动机的线圈供电(不同的霍尔信应该给电动机绕组提供相对应方向的电流),也就是说霍尔传感器状态不一样,线圈的置号电流方向不一样。
霍尔信号传递给控制器,控制器通过粗线(不是霍尔线)给电动机绕组供电,电动机旋转,磁钢与绕组(准确地说是缠在定子上的线圈,其实霍尔一般安装在定子上)发生转动,霍尔传感器感应出新的位置信号,控制器粗线又给重新改变电流方向的电动机绕组供电,电动机继续旋转(当绕组和磁钢的位置发生变化时,绕组必须对应地改变电流方向,这样电动机才能继续向一个方向运动,否则电动机就会在某一个位置左右摆动,而不是连续旋转),这个过程就是电子换向。
无刷直流电动机由直流电源供电,借助位置传感器来检测转子的位置,所检测出的信号触发相应的电子换相线路,以实现无接触式换相。
无刷直流电动机用电子开关和位置传感器代替电刷及换向器,将直流电转换成模拟三相交流电,通过调制脉宽,改变其电流大小来改变转速。
直流无刷电机的控制结构直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:N=120.F/P。
在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。
直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。
也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
无刷电机控制原理图

无刷电机的驱动工作原理1.三相驱动桥下图为无刷电机的三相全桥驱动电路,使用六个N沟道的MOSFET管(Q1~Q6)做功率输出元件,工作时输出电流可达数十安。
为便于描述,该电路有以下默认约定:Q1/Q2/Q3称做驱动桥的“上臂”,Q4/Q5/Q6称做“下臂”。
图中R1/R2/R3为Q1/Q2/Q3的上拉电阻,连接到二极管和电容组成的倍压整流电路(原理请自行分析),为上臂驱动管提供两倍于电源电压(2×11V)的上拉电平,使上臂MOSFET在工作时有足够高的VGS压差,降低MOSFET大电流输出时的导通内阻,详细数据可参考MOS管DataSheet。
上臂MOS管的G极分别由Q7/Q8/Q9驱动,在工作时只起到导通换相的作用。
下臂MOS由MCU的PWM输出口直接驱动,注意所选用的MCU管脚要有推挽输出特性。
驱动桥全部选用N沟道MOSFET的好处:大电流N沟道MOS可供选择的型号众多,货源充足便于购买,使用的MOSFET类型减少,间接降低采购元件的难度。
在图1中,上臂MOS管经过Q7/Q8/Q9驱动,逻辑电平和下臂MOS 刚好相反,这样的好处是,MCU上电时I/O默认为1,上臂MOS不会导通。
只有下臂MOS导通,因此不会有电流经过驱动桥,消除了潜在电路隐患。
C8是整个电调的电源滤波电容,使用中一定要接上,否则无刷电机的反电动势叠加在电源上不能被滤除,由倍压电路整流后的电压高达30V左右,己接近MOSFET的VGS上限,可能会损坏MOSFET。
2.反电动势波形上图所示为无刷电机运转中的理想反电动势波形,红线标出来的是反电动势的过零点。
两个虚线间是60度电气角度,不要理解成电机的机械角度。
常用航模电机属于无刷三相六拍电机,每个电周期有六个状态。
星形接法中(Y形)在每一时刻电机的通电线圈只有两相,另一相线圈悬空,悬空的线圈会产生反电动势,反电动势来源于电机磁体旋转而造成本线圈切割磁力线和另两相线圈通电时的互感。
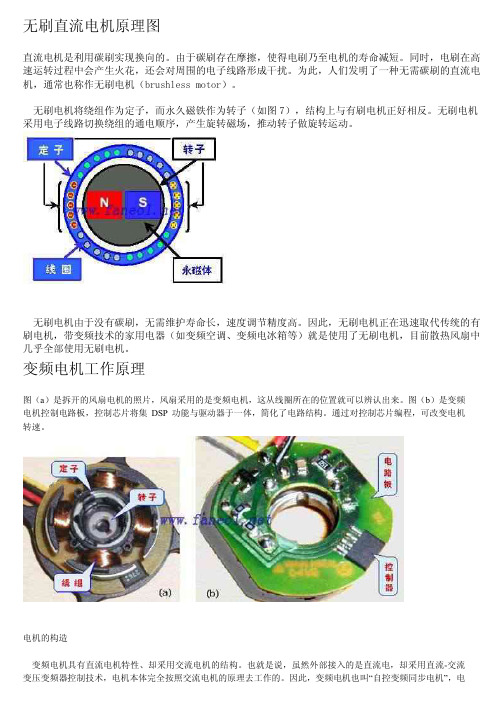
无刷直流电机原理图
。3 图如�成组分部个三器向换和子转、子定由它。械机转旋的能械机为换转能电流直将是机电流直 。间之分�转 00001�0001 在速转�V21�为压电电 供�机电流直为机电扇风的用使中脑电。型类种两机电流交和机电流直有机电�同不的式方电供据根
理原作工本基的机电扇风流直
。号信制控速调入输机电扇风向它过通�线号信制控速转是而 �线出输号信速测是不并线引根三第的扇风线引三些某�是的意注该应。线出输号信速转是则线的色颜 种一外另�地接和源电 V21�为别分色黑和色黄中线引根三�出输头插线引三从般一号信速测的扇风 。较比行进据数的示显与后然�速转际实量测表速转用使可�数倍个某是还速转实真是速转 扇风别辨欲如。号信速转实真的扇风映反成形能才理处过经须必�冲脉个 6 或个 4、个 2 生产圈一转每 如譬�数倍的速转是而�速转实真的扇风是不并号信速转的出输扇风些某。示显行进机主给供提线总据 数过通接直可号信的样这�圈一过转扇风示表头波个每�式形冲脉为常通号信速转的出输路电扇风从
圈线枢电使�在存的器向换于由�见可。场磁生产续继中组绕该在并�组绕对一另入接压电电供将器向 换�后度角定一过转子转当。接联路电外同以得组绕枢电的动转使�刷电的定固着压簧弹用面表的器向 换在。片缘绝是间中片向换的邻相个两每�成组片向换多许由�置装殊特种一的机动电流直是器向换 。动转下用作的力在子转此因�的动不定固是子定于由。用作的力生产场磁的子定与场 磁该�场磁生产时过通流电有中组绕当。组绕为之称�成而制绕线包漆由�圈线的上以组两有中子转 。分部转旋非的机电是�上架支扇风在定固被�极磁主即�子定
理原作工机电频变
。机电刷无用使部全乎几 中扇风热散前目�机电刷无了用使是就�等箱冰电频变、调空频变如�器电用家的术技频变带�机电刷 有的统传代取速迅在正机电刷无�此因。高度精节调度速�长命寿护维需无�刷碳有没于由机电刷无
无刷电机工作及控制原理(图解)
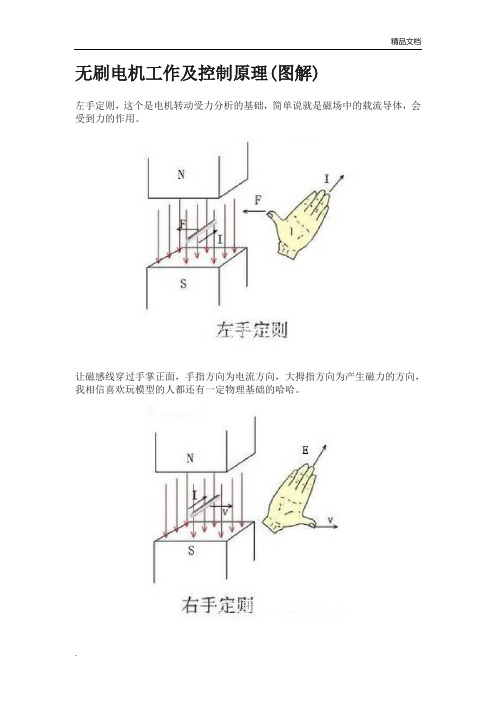
无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D
1MA
IR2101 1J1 5 4 3 2 1 1J2 6 5 4 3 2 1 CON4 5V C 1R8 10K 1EL 1C5 104P CON5 GND 1VRI 1Z/F 1M 1EL 5V GND 1Hc 1Hb 1Ha 5V 1J3 1 2 3 OUT 1MA 1MB 1MC
1R2 100R
Vin OUTPUT GND Feedback on/off
U1 LM2575
U2 7805 IN GND 12VA 1 OUT 3 5V C6 104P C7 104P C8 104P C9 104P C10 104P C11 104P C16 C17 220uF/10V220uF/10V C23 100F/16V
12V C1 104P C2 104P C3 104P C4 104P
L2 100uH C12 100uF/25V
12VA R2 10K R3 1.2K C5 104P
L1 1mH C13 220uF/25V D1 SS210
1 2 3 4 5
V
2
12VA 5V C18 104P C19 104P C20 104P C21 104P C22 104P C25 104PK C24 47uF/35V Title Size B Date: File: 5-Feb-2015 Sheet of E:\居逸电子\市场部\淘宝产品\无刷电机驱动模块 Drawn\无刷电机驱动器 By: .Ddb 6 Number Revision A
1
2
3
4
5
6
1D1 12V 1U1 D 1AT 1AB 1 2 3 4 1N4148 8 VCC VB 7 HIN HO 6 LIN VS 5 GND LO 1R1 100R 1C1 106P
VCC 1D2 1Q1 JY14M 1BT 1BB 1Q2 JY14M 1IOUT 1 2 3 4 12V 1U2 VCC HIN LIN GND IR2101 1R4 100R 1N4148 8 7 6 5 1R3 100R VB HO VS LO 1C2 106P VCC 1Q3 JY14M 1MB 1Q4 JY14M 1IOUT 1Is 1R7 10K 1R14 R005 1R10 10K 1Z/F 1VR 1C6 105P 1R15 1M 1C7 104P 1IOUT 5V 5V 1R11 2K 1R12 2K 1R13 1Hc 103P 5V 2K 1Hb 103P 1C10 1C8 1Ha 103P 1C9 2J2 6 5 4 3 2 1 CON4 2R8 10K 1 2 3 4 12V 2U1 2AT 2AB
VCC 2Q5 JY14M 2MC 2Q6 JY14M 2IOUT B
JY01_HLLE VCC 1C11 1C12 R1 * B 1C13
JY01_HLLE VCC 2C11 2C12 2C13
2R6 100R
100uF/63V100uF/63V100uF/63V
100uF/63V100uF/63V100uF/63V
注意: 1、JY01 电源退耦电容一定要离引脚近,104P 2、Is 退耦电容一定要近引脚近,电阻10K,电容474P 3、功率部分安全距离太近 2U4
1U4 1EL 1Is GND 5V 1Z/F 1M 1AT 1AB 1 2 3 4 5 6 7 8 EL Is GND VDD Z/F M AT AB VR Hc Hb Ha CB CT BB BT 16 15 14 13 12 11 10 9 1VR 1Hc 1Hb 1Ha 1CB 1CT 1BB 1BT 1D3 12V 1U3 1CT 1CB 1 2 3 4 VCC HIN LIN GND IR2101 V C14 476/50V C15 104PK 1R6 100R 1N4148 8 7 6 5 1R5 100R VB HO VS LO 1C3 106P VCC 1Q5 JY14M 1MC 1Q6 JY14M 1IOUT 2EL 2Is GND 5V 2Z/F 2M 2AT 2AB 1 2 3 4 5 6 7 8
IR2101 2J1 5 4 3 2 1 CON5 GND 2VRI 2Z/F 2M 2EL 5V GND 2Hc 2Hb 2Ha 5V 2J3 1 2 3 OUT 2MA 2MB 2MC
2R2 100R
1C4 474P
2C6 474P
1VRI
1R9 10K
2EL 2C4 104P
2VRI
2R9 10K
EL Is GND VDD Z/F M AT AB
VR Hc Hb Ha CB CT BB BT
16 15 14 13 12 11 10 9
2VR 2Hc 2Hb 2Ha 2CB 2CT 2BB 2BT
2D3 12V 2U3 2CT 2CB 1 2 3 4 VCC HIN LIN GND IR2101 1N4148 8 7 6 5 2R5 100R VB HO VS LO 2C3 106P
A
PDF 文件使用 "pdfFactory Pro" 试用版本创建
1
2
3
4
5
2D1 2R1 100R 1N4148 8 VCC VB 7 HIN HO 6 LIN VS 5 GND LO 2C1 106P
VCC 2D2 2Q1 JY14M 2MA 2Q2 JY14M 2IOUT 2BT 2BB 1 2 3 4 12V 2U2 VCC HIN LIN GND IR2101 2R4 100R 1N4148 8 7 6 5 2R3 100R VB HO VS LO 2C2 106P VCC 2Q3 JY14M 2MB 2Q4 JY1 2Z/F 2VR 2C5 105P 2R15 1M 2C7 104P 2IOUT 5V 5V 2R11 2K 2R12 2K 2R13 2Hc 103P C 2K 2Hb 103P 2C10 2C8 2Ha 103P 2C9