伦茨驱动系统资料
伦茨中文使用手册 ppt课件

9400 Servo Drives
Target
First without engineer Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
Next Back
8
Exercise 1: Detect the drive status
by means of LEDs and keypad 通过指示灯和面板检测驱动器状态
1. Switch on the supply voltages (24 V and 400 V)
电源上电
2. Make the left drive rotate:运转左侧驱动器
9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
FB editor
Multi axis applications
单驱动型1)
– Extension module Ethernet (扩展模块-以太网) – Memory module MM330 (存储模块-MM330) – Safety module SM0 (安全模块-SM0)
Online alternatives
How to go online 如何连接
伦茨9300系列驱动系统..
9300系列产品种类
各版本9300系列伺服控制器具有如下统一的硬 件: -内置电源模块-单台控制器即可完成单轴驱动, 不必像以往那样采用整流单元与速度单元的组合; -电源及回馈单元-可实现群控及多轴传动时的 节能运行; -反馈-可选择旋转变压器,正/余弦编码器, 或增量编码器反馈。
端子配置
9300ES接线
9300ES接线
9300ES参数设定
控制器的参数设定的作用是使驱动器适用于 实际应用。 可将实际应用中的参数集存储。共可存储4套 参数集,因此控制器很容易由一种应用控制 调整到另一种应用控制。 参数设定的方式: 通过操作模块 通过现场总线模块及操作程序
参数结构
主菜单:包含子菜单和全部代码表 子菜单:包含将要定义的代码 代码级:没有子代码的代码包含一个参数,有子代码 的代码包含若干参数 参数级/运行级 有四种不同侧参数类型:物理变量的绝对值(如220V, 10S);控制变量的相对值(如50%设定值);特定状 态的数字代码(如0=控制器禁止,1=控制器启动); 显示值(如C0054下电机电流的实际值)
9300系列交流伺服驱动系统
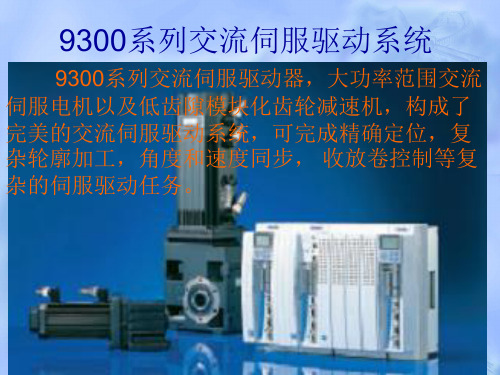
9300系列交流伺服驱动器,大功率范围交流 伺服电机以及低齿隙模块化齿轮减速机,构成了 完美的交流伺服驱动系统,可完成精确定位,复 杂轮廓加工,角度和速度同步, 收放卷控制等复 杂的伺服驱动任务。
9300系列产品种类
9300系列交流伺服控制器分为标准型和专用型,标准型为9300ES(9300 servo);专用型包括用于定位控制的9300EP,用于印刷套准控制的 9300ER,以及用于电子凸轮控制的9300EK。
9300ES接线
将屏蔽线用附件中的屏蔽板①扣紧 ,并将屏蔽板① 用螺丝固定到托 架上②
伦茨驱动器工作原理(一)

伦茨驱动器工作原理(一)伦茨驱动器工作原理什么是伦茨驱动器?伦茨驱动器是一种具有高传动效率和低噪音的机械装置,常被用于汽车、飞机和工业机械等领域。
它是由奥托·伦茨于1894年发明的,如今已成为一种常见的传动系统。
伦茨驱动器的工作原理伦茨驱动器是一种齿轮传动系统,其原理基于两个相互啮合的齿轮,一个为内齿环,一个为外齿环。
内齿环内齿环是伦茨驱动器的主动齿轮,通常由传动源(如引擎)驱动。
它具有一系列斜面齿槽,槽内的齿轮齿相互间隙相等。
外齿环外齿环是伦茨驱动器的从动齿轮,与内齿环啮合并转动。
它具有与内齿环齿槽相配合的槽形齿轮。
工作过程1.当内齿环驱动外齿环时,内外齿轮的齿槽逐渐靠近,并开始相互啮合。
2.内齿环的运动使外齿环也开始转动。
由于齿槽的斜面设计,齿轮齿的相互啮合会引发一个侧向力,使外齿环相对于内齿环旋转。
3.这种侧向力的结果是外齿环的运动轨迹呈现出一个类似椭圆的形状,形成旋转迴圈。
4.外齿环的转动通过传动轴向其他传动装置(如车轮)传递动力。
伦茨驱动器的优点伦茨驱动器具有以下几个优点:•高传动效率:伦茨驱动器的齿形设计使得传动效率非常高,损耗较小。
•低噪音:由于齿轮的设计和啮合方式,伦茨驱动器的噪音较低。
•轻量化:相比其他传动系统,伦茨驱动器的结构相对较轻,有助于减轻整体重量。
•紧凑性:由于齿轮的特殊设计,伦茨驱动器可以在有限的空间内实现高效传动。
结论伦茨驱动器是一种高效、低噪音的传动装置,广泛应用于各种机械系统中。
通过内外齿环的相互啮合和旋转迴圈的形成,伦茨驱动器有效地传递动力并实现所需的机械工作。
以上对伦茨驱动器的工作原理进行的解释,相信能够帮助读者加深对这一传动系统的理解。
使用注意事项在使用伦茨驱动器时,需要注意以下几点:1.润滑:为了保证伦茨驱动器的正常运行,必须定期对齿轮进行润滑。
适当的润滑可以减少摩擦和磨损,延长驱动器的使用寿命。
2.温度控制:由于高速旋转和传递的动力,伦茨驱动器可能会产生较高的温度。
伦茨驱动系统资料共39页

60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
伦茨驱动系统资料
46、法律有权打破平静。——马·格林 47、在一千磅法律里,没有一盎司仁 爱。— —英国
48、法律一多,公正就少。——托·富 勒 49、犯罪总是以惩罚相补偿;只有处 罚才能 使犯罪 得到偿 还。— —达雷 尔
50、弱者比强者更能得到法律的保护 。—— 威·厄尔
56、书不仅是生活,而且是现在、过 去和未 来文化 生活的 源泉。 ——库 法耶夫 57、生命不可能有两次,但许多人连一 次也不 善于度 过。— —吕凯 特 58、问渠哪得清如许,为有源头活水来 。—— 朱熹 59、我的努力求学没有得到别的好处, 只不过 是愈来 愈发觉 自己的 无知。 ——笛 卡儿
伦茨中文使用手册

7
Next Back
Exercise 1: Detect the drive status
by means of LEDs and keypad 通过指示灯和面板检测驱动器
= Controller inhibited 控制器禁止
= Controller enabled 控制器使能
24 V
CAN ERROR
CAN 错误
= Bus warning 总线报警
= Bus off 总线关闭
DRIVE ERROR
驱动器错误 OFF = OK
= Error status 错误状态
= System error 系统错误
通过Engineer 和 操作面板进行参数设定
Technology Applications (TA)
技术应用
Next
Diagnostics and configuration of the
Back
application with the function block
editor
2
Next Back
Modular set-up (≤ 11 kW)
Mounting base 安装底板
Power module 功率模块
Extension module 扩展模块
3
Next Back
Interfaces at the power module
Analog / digital IOs
指示灯
ready
伦茨9400中文使用手册.

9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
– Firmware version 01.51.01 (固件版本01.51.01)
▪ 2x Motor MCS06C41 with resolver and tooth wheel(2个 伺服电机带旋变和齿型轮)
– left Z = 72 and 32 (左 Z=72,32) – right Z = 60 and 20 (右Z=60,20)
USER
用户定义 Applicable in the application 在应用中使用
9400 Servo Drives
Target
First without engineer
Engineer with single drive, basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
Target First without engineer
Engineer with single drive,
basics of TA Structured project, further TA FB editor Multi axis applications Online alternatives
Welcome!
伦茨变频器

总线.2 kbit/s
500 kbit/s
9.6 kbit/s..12Mbit/s
最大端站数
90
63
125
传输距离
1200m
400
1200m
通信介质
RS232,RS485或光纤
RS485
RS485
通信协议
LECOM-A/B V2。0
可联接上位机
PC,IPC,PLC
总线化
The drive system !!!
Automation
1.3 现代驱动系统
高度智能化,高度柔性化
| 基本系统硬件 III
Freely
13.53 Hz
|| 系统功能
configurable
function blocks
||| 用户功能
&
Technology functions II
Electronic gearbox Positioning Register control Cam profile generator HVAC Hoists Liftcontrol
The drive system !!! Automation
直流传动
四套参数集可任意切换(通过端子, 操作面板, 通讯总线) 4900 可四象限 两象限切换运行 电机电位器功能, 可自由编程的8DI/8DO, 2AI/2AO 多种反馈: 线圈电压反馈, 测速机, 旋转变压器, 编码器 多种控制功能: 定位, 同步电子轴, 角度同步, 张力和卷径计算 内置现场总线系统, 如可用InterBus-S
The drive system !!! Automation
2. 发展历程
由Hans Lenze于1947年接管一家机 械传动产品制造厂,开始生产各种 Lenze传动产品
伦茨 Global Drive smd系列变频器 说明书

2 3
安全信息……………………………………………………………2 技术数据………………………………………………………………4
3.1 3.2 通用数据 / 应用条件…………………………………………………………………………4 额定数据…………………………………………………………………………………… 5 3.2.1 3.2.2 1AC 控制器额定数据………………………………………………………………5 3AC 控制器额定数据………………………………………………………………5
!" 0.7g >3.5mA IP20 !" !"#$%&'( <0.5kW 0.5...1kW >1kW !" ! !"#$ !"# !" !
EMC !"#$%&'
!"#$%&'()*+,-. ! / !"#$%&'(
!"#$%&'()*+, EN61000-3-2
4
!
3.2 3.2.1 1AC
5 6 7 8
上电调试………………………………………………………………1 2 参数设定………………………………………………………………1 3 代码表…………………………………………………………………1 4 故障诊断与排除………………………………………………………2 0
i
1
1.1 !"#$
!"#$ smd !"#$%&' !"#$%&'( ( rev 14 !" !"#$%&'( !"#$%
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9300系列产品种类
各版本9300系列伺服控制器具有如下统一的硬 件: -内置电源模块-单台控制器即可完成单轴驱动, 不必像以往那样采用整流单元与速度单元的组合; -电源及回馈单元-可实现群控及多轴传动时的 节能运行; -反馈-可选择旋转变压器,正/余弦编码器, 或增量编码器反馈。
9300ES接线
a) 内部供电方式
X6 1
b. 外部供电方式
93XX
3,3nF 242R X3 100k 100k + 100k 100k GND1 X6
93XX
3,3nF 242R X3 100k 100k 100k 100k GND1
主给定 未激活
主给定
=
1 2 3 = 4 7 X6
10k
2 3
X6/3,X6/4
X6/62, X6/7
模拟量输入2
模拟量输出1
X6/63, X6/7
模拟量输出2
9300ES接线
a) 内部供电方式
控制器使能 快停 CW CCW JOG 设定故障 故障复位 内部电源 1 (+24V) 到达最小速度 准备就绪 达到最大电流
X5
28 E1 E2 E3 E4 E5 39
= 24V +
故障输出 到达最小速度 准备就绪 达到最大电流 为控制板提 供电源 Control electronics
A1 A2 A3 A4
50mA 50mA 50mA 50mA 10R
= 24V +
59
59
为了让X5/A1输出+24V电压需设定:C0005 = XX1X; 例如C0005 = 1010 内部电源供电下的速度控制方式
9300ES接线
CW rotation SIN RefSIN COS RefCOS
0.5V = 2.5V 0.5V = 2.5V
电机端编码器接 头管脚号
最大电缆长度 50 m
RefSIN SIN RefCOS COS Vcc GND -RS485 +RS485 +KTY -KTY
93XX
9 1 2 3 4 5 6 7 11 12
未激活
+
10k
4 7 X6 7
GND1 2mA 2mA -10V..+10V U -10V..+10V U
7
GND1 2mA 2mA -10V..+10V U -10V..+10V U
实际速度 内部电源
62 63
实际速度
实际电机电流
62 63
+10V
为了让X6/63输出+10V电压需设定: C0005 = XX1X ; 例如C0005 = 1010 内部电源供电下的速度控制方式
端子配置
9300ES接线
L1 L2 L3 N PE
F1
OFF K1 K1 ON
F2
F3
Z4 RB Z3
RB
K1
F4
RB1 RB2 PE +UG -UG
F5
-UG
L1
L2
L3
PE +UG
Z1
9352
Z2
U
9321 - 9333
V W
PE PE 28 A1
K1
X1
RFR
M
PE 3~
备注:如果使用直流母线,则必须使用直流快速熔断器
9300ES接线
CW
COS SIN
电机端旋变接 头管脚号
最大电缆长度. 50 m
Resolver
+REF -REF
93XX
1 2
X7
+COS
-COS +SIN -SIN +KTY -KTY
4 5 6 7 11 12
1 2 3 4 5 6 7 8 9
9 针D型接 头
KTY
– 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.
X8 9 针D型 1 接头
2 3 4 பைடு நூலகம் 6 7 8 9
–编码器的供电电压可以在 5~8V间调整 – 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.
KTY
9300ES接线
X4 X5/28 X5/E1...X5/ (ST) X5/A1...X5/A4 X6/1,X6/2 系统总线 控制器使能 数字量输入 数字量输出 模拟量输入1
9300系列交流伺服驱动系统
9300系列交流伺服驱动器,大功率范围交流 伺服电机以及低齿隙模块化齿轮减速机,构成了 完美的交流伺服驱动系统,可完成精确定位,复 杂轮廓加工,角度和速度同步, 收放卷控制等复 杂的伺服驱动任务。 从而广泛应用于印刷、造纸、 纺织、包装、工业机器人、高速电梯等重要行业
9300系列产品种类
9300ES接线
9300ES参数设定
控制器的参数设定的作用是使驱动器适用于 实际应用。 可将实际应用中的参数集存储。共可存储4套 参数集,因此控制器很容易由一种应用控制 调整到另一种应用控制。 参数设定的方式: 通过操作模块 通过现场总线模块及操作程序
参数结构
主菜单:包含子菜单和全部代码表 子菜单:包含将要定义的代码 代码包括: 代码级:没有子代码的代码包含一个参数,有子代码 的代码包含若干参数 参数级/运行级 有四种不同侧参数类型:物理变量的绝对值(如220V, 10S);控制变量的相对值(如50%设定值);特定状 态的数字代码(如0=控制器禁止,1=控制器启动); 显示值(如C0054下电机电流的实际值)
b. 外部供电方式
93XX
3k 3k 3k 3k 3k 3k X5
93XX
3k 3k 3k 3k 3k 3k
GND 2
控制器使能 快停 CW CCW JOG 设定故障 故障复位 (+24V)
28 E1 E2 E3 E4 E5 39
+= _
GND 2 _ 22k
_
22k
A1
A2
A3 A4
50mA 50mA 50mA 50mA 10R
9300ES接线
将屏蔽线用附件中的屏蔽板①扣紧 ,并将屏蔽板① 用螺丝固定到托 架上②
采用合适的卡子将屏蔽线安装到机 柜中的导电背板上
9300ES接线
一定要保证正 一定要与电机接头 保证正确的相序 确的相序
4 5 6 2
电机接头端子
1
1、将屏蔽线用附件中的屏蔽板①扣紧,并将屏蔽板① 用螺丝固定到托架上②。 2、如果电机温度传感器的出线在电机电缆上须接T1和T2.但大多数温度传感器的出线在反馈接 线上。 3、应严格按照EMC规范要求布线,控制电缆与动力电缆必须分开布局。屏蔽线需双端接地。 4、绝大多数现场总线通讯故障、控制紊乱是因为屏蔽、接地不规范造成。
9300ES接线
CW rotation
A A B B Z Z
电机端编码器接 头管脚号
最大电缆长度 50 m
B B A A Vcc GND Z Z +KTY -KTY
93XX
9 1 2 3 4 5 6 7 11 12
X8 9 针D型 1 接头
2 3 4 5 6 7 8 9
KTY
–编码器的供电电压可以在 5~8V间调整 – 采用双绞屏蔽线. – 两端屏蔽线均须接PE地.