无线电导航原理和机载设备简介及使用
无线电导航系统1.

航海仪器
组合导航系统
(Ⅱ)
罗兰C导航系统 卫星导航系统
自动识别系统 航行数据记录仪
结 束
电子定位导航系统的产生与发展
• 电子定位与导航系统的出现,开创了精确航行的 新时代: • 最早出现的具有导航功能的电子系统是测向系统 (DF 20~30年代 ) 。 • 其次是雷达; (30~40年代 ) • 排在第三位的是双曲线导航系统; (40~70年代
概
述
船舶在航行中,要求航海人员尽一切 可能随时确定本船的船位所在。确定船位 的过程成为船舶定位。
一、船舶定位方法 • 航迹推算:推算方法是人类最早应用的航海方
法之一,可以说是伴随着船舶的出现即已开始。 – 航迹绘算:13世纪磁罗经在船上应用,使得推算方
法进了一步。使得推算更进一步的是1500-1600年间 计程仪的出现。从此开始推算方法逐步走向完善,精 度也越来越高。
双曲线系统-Loran,Omega) • 第四是卫星导航系统。 (70~90年代 ) • 第五是AIS和VDR (90~2000年代 ) 无线电导航发展方向:全天候、全球覆盖、高精度、实时、 多功能、自动化
天文定位的发展情况
• 天文定位也是人类最早使用的方法之一, 人类自从走出河道离开岸边航行起便开始 使用天体指航并大概估计位置,开始只是 能够确定南北方向(纬度)上的位置,而 东西方向(经度)上的位置只是到了18世 纪钟表的发现后才能测定。此后逐渐形成 了完整天文定位并应用了几百年。 • 现在,随着高精度定位系统的出现,天文 定位的位置已发生了根本性的变化。
三、无线电导航系统分类
近程:50~100海里 中程:300~600海里 作用距离 1500海里 b 远程: 全球 二维:直线(测角)、圆(测距)、双曲线(测距离差) 位置线形状 三维:平面(测角)、球面(测距)、双曲面(测距离合) 自备式:信号发射接收一体 雷达 设 置 它备式:导航台+船台 陆基:导航台在地球上 导航台位置 空基:导航台在外层空间
如何使用无线电定位仪进行定位和导航
如何使用无线电定位仪进行定位和导航无线电定位仪是一种基于无线电通信原理的定位和导航工具,通过接收和解析无线电信号来确定用户的位置和导航方向。
本文将介绍如何使用无线电定位仪进行定位和导航。
1. 介绍无线电定位仪的原理无线电定位仪利用无线电信号的传播和接收特性来实现定位和导航。
它通过接收来自卫星或地面基站发射的无线电信号,并利用信号传播的时间差或信号强度等信息来计算用户的位置和导航方向。
2. 定位功能的使用方法使用无线电定位仪进行定位需要将设备接收到的信号传输到定位算法中进行处理。
首先,确保无线电定位仪的天线朝向开放,接收到的信号质量较好。
然后,启动定位仪设备并等待设备自动搜索卫星或地面基站的信号。
一旦信号被接收到并稳定下来,设备将会计算用户的位置,并显示在设备的屏幕上。
3. 导航功能的使用方法无线电定位仪的导航功能可以将用户的位置和目的地进行比对,并通过设备的屏幕或声音提示等方式指引用户前进方向。
在使用导航功能前,需要首先设置目的地。
可以通过设备的菜单或导航界面进行设置,输入目的地的地址或坐标信息。
确定目的地后,设备会根据当前位置和目的地自动生成导航路线,并提供具体的导航指引。
4. 常见问题及解决方法使用无线电定位仪进行定位和导航时,可能会遇到一些问题,如信号质量不稳定、导航路线错误等。
对于信号质量不稳定的问题,可以尝试调整设备的天线朝向,或切换到其他卫星或基站的信号。
对于导航路线错误的问题,可以检查目的地输入是否正确,或重新设置目的地。
此外,还可以参考设备使用手册或在线帮助文档,寻找解决问题的方法。
5. 无线电定位仪的发展趋势随着技术的不断进步,无线电定位仪也在不断发展。
未来,无线电定位仪有望具备更加精确和稳定的定位能力,以满足用户对精准定位的需求。
同时,无线电定位仪可能会与其他设备进行融合,如智能手机、车载导航系统等,提供更加方便和全面的导航服务。
总结:无线电定位仪是一种利用无线电信号进行定位和导航的工具。
机载电子设备-第八章_无线电导航设备与系统3
3.1 自动测向器(ADF)(3)
ADF指示的角度是飞机纵轴方向到地面导 航台的相对方位。因此,若要得到飞机相 对于导航台的方位,还必须获知飞机的航 向,这需要与磁罗盘或其他航向测量设备 相结合。 飞机上通常把磁罗盘和ADF的指示部分结 合在一起,构成无线电磁指示器(RMI, Radio Magnetic Indicator)。
利用两个地面导航台为飞机定位
判断飞机飞越导航台的时间
3.1 自动测向器(ADF)(5)
判断飞机飞越导航台的时间:当飞机飞向 导航台时,根据相对方位角的变化来判断 飞越导航台的时间。如方位指示由0 °转向 180 °的瞬间即为飞越导航台的时间; 利用方位指示保持沿预定航路飞行,即向/ 背台飞行; 由于工作于中长波段,可接收民用广播信 号,并可用于定向。
3.1 自动测向器(ADF)(7)
机载设备
自动测向接收机:一般为超外差式设计; 控制盒:用于控制各种工作状态的转换、 频率选择和远、近台的转换等,并可进行 调谐; 方位指示器 天线
3.1 自动测向器(ADF)(8)
机载天线
采用两个(正交)环形天线和一个垂直天线, 一个环形天线的环面与飞机纵轴垂直,当 飞机对准导航台时接收信号最小,另一个 环形天线的环面与飞机横轴垂直,当飞机 对准导航台时接收信号最大,即接收信号 的强弱随飞机的纵轴移动而变化,而接收 信号的相位在最小值时转换。这一信号再 与垂直天线(用于辨向)接收信号叠加即可 确定方位。
相对 方位 观测线
飞机到地面导航台的相对方位
3.1 自动测向器(ADF)(2)
系统的工作频率在150kHz~1800kHz范围 内,属中长波波段,因此主要依靠地波或 直达波传播。 地波的传播距离可以达到几百公里,但易 受到天波的污染,特别在夜间。只有当飞 机离地面导航台站较近时,方位读数才比 较可靠,测向精度可达2°左右。
无线电导航的原理与应用

无线电导航的原理与应用一、导言无线电导航是一种利用无线电信号进行定位和导航的技术。
它广泛应用于航空、航海、车载导航和无人机系统等领域。
了解无线电导航的原理与应用对于理解现代导航系统的工作方式至关重要。
本文将深入介绍无线电导航的原理和其在不同领域的应用。
二、无线电导航原理无线电导航是基于无线电波传播的定位和导航技术。
其原理基于以下几个关键要素:1. 信号发射器无线电导航的系统中,会有一个或多个信号发射器,常用的是卫星导航系统中的卫星。
信号发射器会发送特定频率的无线电波信号。
2. 接收器接收器负责接收信号发射器发出的无线电波信号,并将其转化为导航系统能够识别和处理的信息。
3. 测距原理无线电导航中常用的测距原理包括时间测距、多普勒效应和信号强度测距等。
这些原理可以通过接收到的信号特征来确定位置和距离。
4. 三角定位法利用多个信号发射器和接收器,可以采用三角定位法来确定准确的位置。
通过测量不同信号到达接收器的时间差和距离,可以计算出接收器的位置。
三、无线电导航的应用1. 航空导航航空领域是无线电导航最常见的应用之一。
航空导航系统利用全球定位系统(GPS)等技术,能够实时、准确地定位飞机的位置。
无线电导航在航空领域中的应用使得飞行变得更加安全和高效。
2. 航海导航航海导航依赖于无线电导航系统来确定船只的位置和航向。
借助GPS和其他卫星导航系统,船只可以在海上定位和导航,避免撞船和迷航等危险情况。
3. 车载导航车载导航系统利用无线电导航原理来为驾驶员提供路线指引和实时导航。
通过全球定位系统和地图数据,驾驶员可以更好地规划行驶路线并避开交通拥堵。
4. 无人机导航无人机的导航是依赖于无线电导航技术实现的。
无人机可以利用GPS等定位系统精确导航,实现自主飞行和遥控飞行。
5. 军事应用无线电导航在军事领域也有广泛的应用。
军事导航系统能够为士兵和战机提供准确的定位和导航信息,提升军事行动的效率。
结论无线电导航作为一种基于无线电信号的定位和导航技术,广泛应用于航空、航海、车载导航和无人机等领域。
无线电导航设备与系统
无线电导航设备与系统概述无线电导航是借助于载体上的电子设备接收和处理无线电波在空间传播时的无线电信号参量(如幅度、频率及相位等)获得载体相对导航台的导航参量(如方位、距离、速度等),从而获取载体的实时位置信息,以保障载体安全、准确、及时地到达目的地的一种导航手段。
无线电导航具有不受时间、天气的限制;精度高;定位时间短;设备简单、可靠等优点。
无线电导航的主要缺点在于它必须辐射和接收无线电波因而易被发现和干扰,且绝大多数无线电导航设备需要载体外的导航台支持工作,一旦导航台失效,将使与之相应的无线电导航设备在此期间无法使用。
航空导航系统所必备●确定所产生的信号特性的方法;●带有天线的发射机,用来产生和发射无线电波;●飞机接收设备和天线,用来截获信号并对接收到的信号进行选择和译码;●为驾驶员提供的适当的视觉显示装置,用来对接收到的信号进行适当的评价。
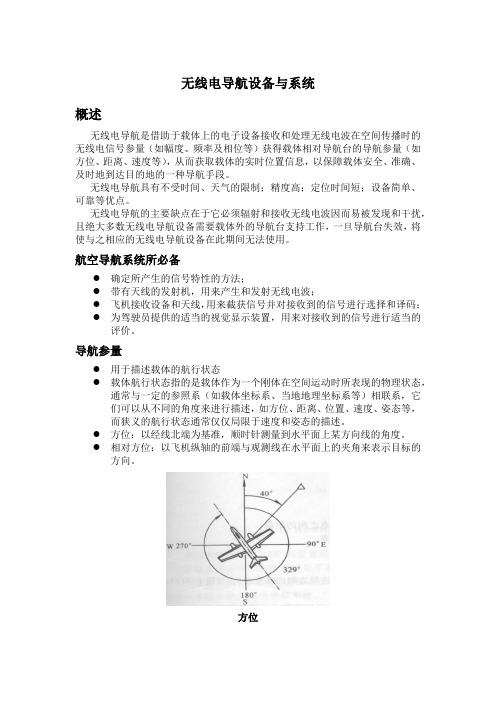
导航参量●用于描述载体的航行状态●载体航行状态指的是载体作为一个刚体在空间运动时所表现的物理状态,通常与一定的参照系(如载体坐标系、当地地理坐标系等)相联系,它们可以从不同的角度来进行描述,如方位、距离、位置、速度、姿态等,而狭义的航行状态通常仅仅局限于速度和姿态的描述。
●方位:以经线北端为基准,顺时针测量到水平面上某方向线的角度。
●相对方位:以飞机纵轴的前端与观测线在水平面上的夹角来表示目标的方向。
方位相对方位基本原理在二维或三维空间中,若导航台的位置已知,相对于该位置的某一导航参量相同的点的轨迹应为一条曲线或一个曲面,该曲线或曲面称为位置线或位置面;单值确定载体的位置,至少需要测定两条位置线(在二维空间内)或三个位置面(在三维空间内),根据相交定位法实现定位。
位置线(a)圆位置线;(b)直线位置线;(c) 等高线;(d)双曲线位置线相交定位 位置线定位原理☐ 如果通过无线电方式测量到了三个独立的几何参量,则可以得到,三个独立的位置面方程:⎪⎩⎪⎨⎧===),,(),,(),,(332111z y x f u z y x f u z y x f u☐ 因而可以得到载体在空间中的三维位置。
地基无线电导航基本原理及系统简介.ppt
(4)地基无线电空中测距定位原理
P
ρ1
ρ3
ρ
ρ4
2
测量4个地面站至 载体的无线电信号传
播时间延迟,将时间
延迟与光速相乘得相
应伪距,然后由4个伪
距及地面站已知坐标
求解载体坐标及钟差。
28
伪距观测方程为
i X p Xi c t
其中
i :伪距观测值;
X p :载体位置矢量,未知; X i :地面站位置矢量,已知,i=1、2、3和4; c :光速;
飞机
对于无源测距而言,
t
d c t
但存在时间同步问题,
用于罗兰-C系统。
对于有源测距而言,
d c t 2
但存在电磁暴露问题,用于测距器系统。
20
P'
导 航 台
A dA
导
航
台
dB
B
P
测距定位原理
d A X p X A dB X p X B
测距水平位置线是以导航台为中心、导航台与载体间 距离为半径的圆。用户分别测得载体相对导航台 A 和 B 的距离,确定两条位置线,其交点为载体的位置。
M B
Xp XM Xp XB
A
23
测距差定位原理
依靠布设于海岸上的一系列导航台,周期性地同步发射脉
冲或载波信号。船载接收机接收到来自主台和副台 A 的信号后,
测量脉冲(包络)信号达到的时间差(相位差),然后计算得 到船至两台的距离差。于是,可以确定一条以2个台为焦点的 双曲线(位置线)。测量主台与副台B的脉冲信号,可以确定
26
脉冲-相位测距差法
d AM
=c
2N AM
AM
其中 AM 为载体所测主台M、副台A的脉冲包络信号的相
导航工程技术专业学习教程无线电导航原理与技术

导航工程技术专业学习教程无线电导航原理与技术导航工程技术专业学习教程:无线电导航原理与技术无线电导航是现代导航系统中的重要组成部分,它利用无线电信号来确定目标位置和导航航行的技术。
本文将介绍无线电导航的原理及相关技术。
一、无线电导航原理无线电导航的原理基于无线电信号的传播和接收。
导航系统通过测量无线电信号的时间、频率和幅度等参数,来判断接收器与发射器之间的距离和方向,从而实现目标的定位和导航。
1. 无线电信号传播无线电信号在空间中传播时会受到衰减和干扰。
衰减是指信号在传播过程中损失能量,其程度与距离和介质特性有关。
干扰是指其他无线电信号或物体对信号传播造成的影响。
了解信号传播的特性对于设计和优化导航系统至关重要。
2. 接收信号处理导航系统的接收器通过接收信号并进行处理来获取目标的位置和导航信息。
接收信号处理的关键是信号的解调和解调。
解调是指恢复信号的调制特性,包括频率、幅度和相位等。
解调则是指从解调信号中提取目标信息,例如距离、速度和方向等。
二、无线电导航技术无线电导航技术应用广泛,包括卫星导航系统、无线电信标和无线电方位器等。
1. 卫星导航系统卫星导航系统是利用卫星发射无线电信号,通过接收卫星信号来确定目标位置和导航。
全球定位系统(GPS)是最常用的卫星导航系统之一,它由多颗卫星组成,可提供全球覆盖的导航服务。
其他卫星导航系统还包括伽利略导航系统和北斗导航系统等。
2. 无线电信标无线电信标是一种用于导航的无线电设备,它发射特定的无线电信号,标记着特定的位置。
航空器和船舶等可以通过接收和识别无线电信标的信号,来确定自身的位置和导航航行。
无线电信标的种类有很多,例如雷达信标、无线电信号灯和无线电浮标等。
3. 无线电方位器无线电方位器是一种利用无线电信号进行方位测量的设备,常用于航空和海洋导航中。
通过测量接收到的信号到达时间差异和信号强度,无线电方位器可以确定目标相对于其位置的角度和方向。
无线电方位器的应用包括无线电导航台和无线电方位查找器等。
民航常用无线电导航设备
3.地面设备的基本工作原理 3.1.航向信标和下滑信标的主要组成部分 航向信标和下滑信标主要由设备机柜、电源、天线信号分配箱、天线阵等组成,如图 1—3、 1—4、1—5 所示。
图 1—3 挪威 NM7000 型机柜及电源示意图
图 1—4 航向信标 12 单元天线阵示意图
3
图 1—5
M 型下滑信标天线阵
覆盖区边缘——C 点 覆盖区边缘——A 点 A 点—————B 点 B 点——基准数据点
均从 0.035 线性降到 0.023 0.023
6
0.023
图 1—11
下滑道结构示意图
(4) 下滑道宽度 下滑信标的接收机同样也校准到下滑道宽度边缘为 150μA,其等于 0.175ddm;在宽度边缘 内的区域,称为下滑道扇区,宽度为 1.4°。 (5) 覆盖范围:天线前方左右各 8°,上至 1.75θ、下至 0.45θ,距离至少为 10NM,如图 1—12 所示。
图 1—13
指点信标设备机柜示意图
7
图 1—14
机房和天线示意图
图 1—15 4.机载设备及基本工作原理
覆盖范围示意图
机载设备包括接收天线、接收机、控制器及指示器等,如图 1—16 所示。
8
图 1—16
机载设备示意图
4.1.航向和下滑信标的基本工作原理 图 1—17 为 ILS 系统的典型示意图,对于航向和下滑信标来说,从一架正在着陆的飞机上 看,在航道线左边和下滑道上面,90Hz 调制占优势;在航道线右边和下滑道下面,150Hz 调制 占优势;在航道线和下滑道上,两个调制信号的幅度相等。把这些信号作用到机载指示器上, 就能给飞行员提供正确的引导信息。
1.地面设备的组成 ① 航向信标:航向信标的主要作用是给进近和着陆的飞机提供对准跑道中心延长线航向道 (方位)信息。 工作在 VHF 频段,频率范围为 108.1~111.975MHz ,每个频道之间的间隔为 0.05MHz ;并 优先使用以 MHz 为单位的小数点后一位为奇数的那些频率点,例如 109.7、110.3 等;小数点后 一位为偶数的那些频率点则分配给了全向信标。因此,航向信标只有 40 个频道可使用。 ② 下滑信标:下滑信标的主要作用是给进近和着陆的飞机提供与地面成一定角度的下滑道 (仰角)信息。 工作在 UHF 频段,频率范围为 328.6~335.4MHz ,每个频道之间的间隔为 0.15MHz,其工 作频道与航向信标的工作频道配对使用,因此也只有 40 个频道可供使用。 ③ 指点信标:用于给进近和着陆的飞机提供距跑道入口固定点的距离信息。工作在 VHF 频段,固定频率为 75MHz。 ④ 测距仪:用测距仪代替指点信标时,能给进近和着陆的飞机提供至测距仪台或着陆点或 跑道入口的连续距离。工作在 L 波段,频率范围为 962~1215MHz。与 ILS 合用时,其工作频率 与航向信标配对使用。 各台的典型位置如图 1—1 所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
★无线电导航原理和机载设备简介★导航概述早期的飞行器在空中飞行仅依靠地标导航--飞行中盯着公路、铁路、河流等线状地标;山峰、灯塔、公路交汇点等点状地标;湖泊、城镇等面状地标。
后来,空勤人员利用航空地图、磁罗盘、计算尺、时钟等工具和他们的天文、地理、数学知识,根据风速、风向计算航线角,结合地标修正航线偏差,这种工作叫做“空中领航”。
这种方法虽然“原始”,但航空先驱林伯当年就是依靠这些东西驾驶一架活塞式单发动机飞机“圣路易斯精神号”独自由美国西海岸起程,直接飞越大西洋到达巴黎的,他飞越茫茫大西洋时还通过观察海上的洋流、夜空中的星座来辨别方向、确定位置。
空中领航学是飞行员的一门必修课,其核心是用矢量合成原理修正风对飞行航迹的影响。
随着无线电技术的发展,各式各样的电子设备为飞行器提供精确的导航信息:有用于洲际导航的奥米加导航系统(OMEGA)、适用于广阔海面的罗兰系统(LORAN-A,LORAN-C)、用于近距导航的甚高频全向无线电信标导航系统(VORTAC),另外还有一些专为军事用途开发的导航信标和雷达系统。
现在,利用同步卫星工作的全球定位系统(GPS)已开始广泛使用。
但 VORTAC 仍是近距导航的主流,绝大多数现代军民用飞机,包括民航客机、小型通用飞机都配备有VOR接收机(VOR,very high frequency ommi-directional range)。
VORTAC是VOR/DME和TACAN的统称。
VOR/DME是民用系统,TACAN是为适应舰载、移动台站而开发的军用战术空中导航系统(即塔康导航系统)。
两者的工作原理和技术规范都不同,但使用上它们是完全一样的。
事实上,有的VOR/DME和TACAN发射台站是建在一起、使用同一个频率的,对空勤人员来说,只是一个VOR信标。
VOR信标是世界上最多、最主要的无线电导航点。
许许多多的VOR台站相隔一定距离成网络状散点分布,当飞机上的接收机收到VOR信标的信号,飞行人员就可通过专用仪表判断飞机与该发射台站的相对位置,如果台站信号是带测距的(DME,distance measuring equitment),还可知道飞机与台站的距离,从而确定飞机当前的位置,并知道应以多少度的航线角飞抵目的地。
VOR/DME/NDB基本原理VOR:very high frequency ommi-directional range,甚高频全向无线电信标VOR信号发射机和接收机的工作频率在108.0-117.95 MHz 之间。
VOR台站发射机发送的信号有两个:一个是相位固定的基准信号;另一个信号的相位是变化的,同时象灯塔的旋转探照灯一样向360度的每一个角度发射,而向各个角度发射的信号的相位都是不同的,它们与基准信号的相位差自然就互不相同。
向360度发射的信号(指向磁北极)与基准信号是同相的,而向180度发射的信号(指向磁南极)与基准信号相位差180度。
飞机上的VOR接收机根据所收到的两个信号的相位差就可判断飞机处于台站向哪一个角度发射的信号上。
也就是说,可以判断飞机在以台站发射机为圆心的哪一条“半径”上。
VOR台站发送的信号形成360条“半径”,辐射状向各个方向传送,每条“半径”就是一条航道,称为“Radial”。
假如:飞机位于平州VOR台站(该台站代号为POU)的正东南方,朝台站飞去,飞越台站时即改航向,往正西南方飞去。
用导航术语来说就是:飞机沿POU的 135 Radial(R-135),飞向(inbound)台站,即其磁航向为315度,到达POU后,沿R-225,飞离(outbound)台站,即其磁航向为225度。
注意:当飞机沿某条Radial飞离台站,其磁航向就是该条Radial号数;但当飞机沿某条Radial飞向台站,其磁航向就与该条Radial的号数差180。
由于VOR的无线电信号与电视广播、收音机的FM广播一样,是直线传播的,会被山峰等障碍物阻隔,所以即使距离很近,在地面也很少能接收到VOR信号,通常要飞高至离地2000-3000英尺才收到信号,飞得越高,接收的距离就越远。
在18000英尺(5486米)以下,VOR最大接收距离约在40到130海里(1海里=1.852公里)之间,视障碍物等因素而定。
在18000ft以上,最大接收距离约为130海里。
DME:distance measuring equitment,测距装置前面提过,有的VOR台站是带有DME的,DME工作在UHF频段,但空勤人员不必理会它的频率,只要调好VOR的频率,接收到信号,过一会,距离数字就会计算出来显示在仪表板上。
简单工作原理是这样的:机载DME发射信号给地面台站上的DME,并接收地面DME应答回来的信号,测量发射信号与应签信号的时间差,取时间差的一半,就可计算出飞机与地面台站的直线距离。
但应注意,仪表板上显示的距离是飞机与地面台站的斜边距离,单位为海里。
由勾股定理可知,飞机在地面的投影与台站的距离应略小于这个斜边距离的。
同样道理,DME仪表板上显示的速度也是“斜”的,表示飞机与台站的“距离缩短率”,单位是节,它既不等于地速,也不等于表速。
根据DME显示的距离、速度,可大致估算飞机的地速和到达台站所需时间。
NDB:non-directional beacon,无方向性信标,或称“归航台”NDB是现今仍在使用中,最古老的电子导航设备,在一些没有仪表着陆系统的小机场附近,常建有廉价的NDB台站,用作导航、着陆指引。
其名称“无方向性”是指台站向各个方向发射的信号都是一样的,不象VOR那样互相有(相位)差别。
飞机上的NDB信号接收机叫做ADF(automatic direction finder,方位角指示器)。
ADF的仪表头只有一支指针,当接收到NDB信号,ADF的指针就指向NDB台站所在的方向。
如果飞机径直朝台站飞去,指针就指着前方,当飞机飞过台站并继续往前飞,指针会转过180度指向后方。
机载电子导航设备简介这里先明确一下:VOR和NDB都是地面的台站,分别发射VOR信号和NDB信号给飞机上的Nav1、Nav2和ADF接收机,在FS98里面,飞Cessna182S时按键 Shift-2 或用Mouse 点击仪表板下方的“航空电子设备总开关”就可见到这些接收机的控制面板(同时还见到机载DME、自动驾驶仪等设备的控制面板)。
Nav1、Nav2和ADF这三台接收机除有控制面板外,还各有一个圆形仪表头安装在飞机主仪表板的右侧,指示具体的导航信息。
与Nav1和Nav2接收机连接的仪表头都称为OBI,分别为OBI1和OBI2。
机载DME也连接一个长方形的数字表头,安装在这三个圆形表头上方。
一、航空电子设备控制面板COM1和Nav1面板COM1:甚高频无线通讯电台,频率范围118.0-136.975MHz。
Nav1:可接收VOR信号和完整的ILS信号,频率范围108.0-117.95MHz。
Nav2面板Nav2只用于接收VOR信号。
用Mouse点击数字以改变接收频率。
ADF面板接收NDB信号,频率范围200-400KHz机载DME面板左边数字为计算出的距离和速度。
右边R1/R2开关用来切换显示Nav1和Nav2的DME计算结果。
应答器面板(transponder)接收空中交通管制雷达的信号,并回应发射四位数字信号给空中交通管制雷达,让空管员在雷达上看到飞机的位置,甚至高度。
自动驾驶仪控制面板(autopilot)二、仪表头DME表头:从左到右显示距离、速度和到达所选VOR台站所需时间,下方还带有Nav1、Nav2的显示切换关。
OBI2:Omni-Bearing Indicator,与Nav2接收机连接的仪表,显示VOR信息。
OBS旋钮:Omni-Bearing Selector,使刻度盘转动以选定航线(Radial)CDI指针:Course Deviation Indicator,航线偏差指针,指示飞机当前位置在OBS所选的航线(Radial)上、偏向左边或偏向右边。
To/From/Off 标志:三角形向上表示To;三角形向下表示From;红白间条表示Off--未接收到OBS所选的Radial信号OBI1:Omni-Bearing Indicator,与Nav1接收机连接的仪表,除具OBI2的功能外,还显示仪表着陆系统(ILS)的进近航路的水平及垂直位置信息。
标志:To/From/Off标志移到下方。
增加GS标志,表示是否接收到ILS的下滑道(Glide Slope)信号。
红白间条表示接收不到信号,此时下滑道指针未被激活,不起作用。
下滑道指针:指示飞机当前高度与ILS下滑道规定高度的偏差。
ADF:Automatic Direction Finder,与NDB接收机连接的表头,称为“方位角指示器”。
接收到信号后指针直接指向台站所在方位。
旋钮和刻度盘是纯机械的辅助显示装置,与指针指向、信号接收无关。
旋钮和刻度盘的作用是:指示飞向台站应取的航向与当前飞机航向相差的度数。
左图所示,台站在飞机的左前方,角度偏差在20-25度之间。
总结:1、VOR是地面发射台站,Nav是机载接收机。
2、接收机Nav有控制面板,按Shift-2打开的就是控制面板,在上面可调节Nav的接收频率。
3、接收机Nav还有仪表头,叫OBI,它装在飞机的主仪表板右侧,显示具体的导航信息。
4、整个OBI(仪表头)由四部分组成:CDI指针、To/From/Off 标志、OBS旋钮、刻度盘。
5、Nav1所接的仪表头OBI1本身可指示VOR信息(与OBI2一样)。
6、为了指示仪表着陆系统的ILS信息,OBI1比OBI2多了一个GS标志和一支下滑道指针。
GS标志表示是否接收到信号,下滑道指针和CDI共两支指针,分别指ILS的水平、垂直方向的位置信息。
下一篇开始将具体讲述如何使用VOR/DME、NDB、ILS信号和机载电子设备进行导航和着陆。
但首先必须理解上面提到原理,熟记有关概念及其英文缩写。
★机载VOR设备使用详解★机。
Nav1作VOR使用时与Nav2是一样的。
下面以Nav2为例说明VOR的使用方法。
★VOR设备使用详解★按Shift-2打开电子设备控制面板,调好Nav2的频率接收信号。
在Nav接收到信号前(Flag为“OFF”),旋转OBS旋钮(用mouse连续点击它)也会令刻度盘转动,但这时CDI指针是不会动的。
接收到信号后(Flag为“To”或“From”),旋转OBS旋钮令刻度盘转动的同时,CDI 会根据OBS读数、飞机与地面台站的相对位置偏移。
一、测定方向方法有两种:(1)旋转OBS,直至Flag指示为“To”,即三角形向上,并且CDI指针位于中间,假设此时OBI刻度盘顶上读数为270,那么:飞机沿270度航向(向西飞)可飞至台站上空。