非对称缓和曲线坐标计算程序
18讲 非完整缓和曲线坐标计算
交接控制桩
直线转点 曲线交点 副交点 水准基点
技 立 业
曲线要素表
水准基点表
曲线五大桩
延伸控制桩 延伸水准基点
二、 线路施工复测
2、线路施工复测:为了确保线路施工测量精度,施工前,
德 修 身
施工单位应全面恢复定测桩点,同时检查移交桩点的可靠性, 这项工作称为线路施工复测。
复测提交资料
技 立 业
(1)复测说明 (2)复测线路示意图 (3)控制桩复测角度与设计角度比较表 (4)复测曲线偏角与设计曲线偏角比较表 (5)控制桩复测距离与设计距离比较表 (6)水准点复测高差与设计高差比较表 (7)复测控制点桩点表 (9)测量仪器检定证书复印件
2
( R1 * R2 )* l f ( R1 R2 )
pz p 180 p
2 p p 2 3 3A
2 lp
p p
L2 180 p 2 RL0
工程测量教研室
工程测量Ⅱ
三、计算施工坐标系下点的坐标
当转向角为有右时:
X i xi cos yi sin X ZH Yi yi cos xi sin YZH
当转向角为左时:
X i xi cos yi sin X ZH Yi yi cos xi sin YZH
工程测量教研室
二、 线路施工复测
1、交(接)桩:设计单位交付图纸资料的同时,在现场将控
制点实地位置移交给施工单位,这项工作成为交(接)桩。
德 修 身
图纸资料
工程测量Ⅱ
第6章 全站仪坐标法中线测量
—非完整缓和曲线坐标计算
5800交点正反算坐标(可计算不对称缓和曲线)
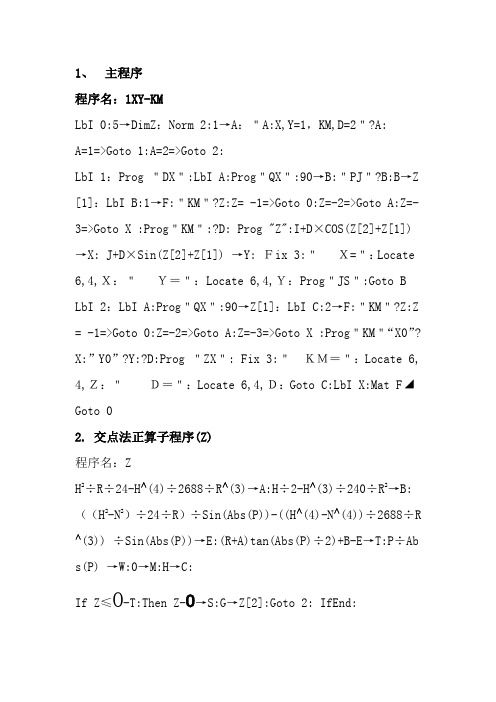
1、主程序程序名:1XY-KMLbI 0:5→DimZ:Norm 2:1→A:"A:X,Y=1,KM,D=2"?A:A=1=>Goto 1:A=2=>Goto 2:LbI 1:Prog "DX":LbI A:Prog"QX":90→B:"PJ"?B:B→Z [1]:LbI B:1→F:"KM"?Z:Z= -1=>Goto 0:Z=-2=>Goto A:Z=-3=>Goto X :Prog"KM":?D: Prog "Z":I+D×COS(Z[2]+Z[1]) →X: J+D×Sin(Z[2]+Z[1]) →Y: Fix 3:"X=":Locate 6,4,X:"Y=":Locate 6,4,Y:Prog"JS":Goto B LbI 2:LbI A:Prog"QX":90→Z[1]:LbI C:2→F:"KM"?Z:Z = -1=>Goto 0:Z=-2=>Goto A:Z=-3=>Goto X :Prog"KM"“X0”? X:”Y0”?Y:?D:Prog "ZX": Fix 3:"KM=":Locate 6, 4,Z:"D=":Locate 6,4,D:Goto C:LbI X:Mat F◢Goto 02. 交点法正算子程序(Z)程序名:ZH2÷R÷24-H∧(4)÷2688÷R∧(3)→A:H÷2-H∧(3)÷240÷R2→B:((H2-N2)÷24÷R)÷Sin(Abs(P))-((H∧(4)-N∧(4))÷2688÷R ∧(3)) ÷Sin(Abs(P))→E:(R+A)tan(Abs(P)÷2)+B-E→T:P÷Ab s(P) →W:0→M:H→C:If Z≤O-T:Then Z-O→S:G→Z[2]:Goto 2: IfEnd:If Z≤O-T+H:Then Z-O+T→S:Prog “HX”:G+WK→Z[2]:Goto 4:IfEnd:If Z≤O-T+ΠR×Abs(P)÷180+H÷2-N÷2: Then 180(Z-O+T-0. 5H) ÷R÷Π→S : A+R(1-Cos(S))→B:H÷2-H∧(3) ÷240÷R2+Rsin(S)→A:R→M:G+WS→Z[2]:Goto 4: IfEnd:O-T+ΠR×Abs(P)÷180+H÷2+N÷2-Z→S:(R+N2÷R÷24-N∧(4)÷2688÷R∧(3))tan(Abs(P) ÷2)+N÷2-N∧(3) ÷240÷R2+E→T :N→H:Prog “HX”:G+P→S:S-WK→Z[2]:U+(T-A)Cos(S)-WBSi n(S)→I:V+(T-A)Sin(S)+WBcos(S)→J:Goto 3:LbI 4:U+(A-T)cos(G)-WBsin(G)→I:V+(A-T)Sin(G)+WBcos(G) →J: Goto 3:LbI 2:U+Scos(Z[2])→I:V+Ssin(Z[2]) →J: LbI 3:C→H3. 交点法缓和段转化子程序(HX)程序名:HXS-S∧(5) ÷40÷R2÷H2+S∧(9) ÷3456÷R∧(4) ÷H∧(4)→A:S∧(3)÷6÷R÷H-S∧(7) ÷336÷R∧(3) ÷H∧(3)+S∧(11) ÷42240÷R ∧(5) ÷H∧(5)→B:90S2÷Π÷R÷H→K:RH÷S→M4. 交点法反算子程序(ZX)程序名:ZXZ:0→D:LbI 0:Prog “Z”:Pol(X-I,Y-J):J-Z[2] →J:Isin(J) →S:Icos(J) →I:If Abs(I)<0.1:Then Z+I→Z:S→D:Goto 2:Else Goto 1: LbI 1:If M=0:Then Z+I→Z:Goto 0:Eles Pol(M-WS,I):(JMΠ)/180→I:Z+I→Z:Goto 0:IfEndLbI 25.线路选择子程序(线路选择输0时。
非对称非完整缓和曲线推算公式
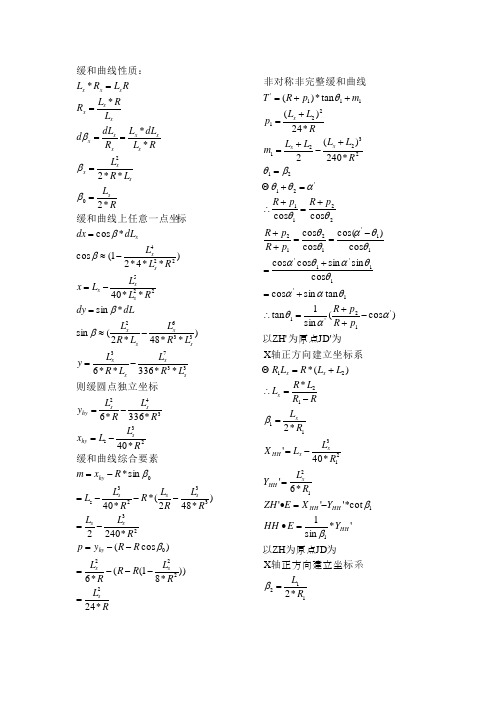
RL R L R R R L R R y p R L L R L R L R R L L R x m R L L x R L R L y L R L L R L y L R L L R L dLdy R L L L x R L L dL dx RL L R L RL dL L R dL d L R L R R L R L s s s hy ss ss s hy shy ss hy s xs x s xs x s xx s xxs sxx s xx x x x xs x s x x *24))*81((*6)cos (*2402)*482(**40sin **40*336*6**336**6)**48*2(sin *sin **40)**4*21(cos *cos *2**2****22220233323s 023s 3423373336222522402=---=--=-=---=-=-=-=-=-≈=-=-≈=======βββββββββ缓和曲线综合要素则缓圆点独立坐标标缓和曲线上任意一点坐缓和曲线性质:1121112213111221'12'11'11'1'11'12122211'212123221221111'*2轴正方向建立坐标系X 为JD 为原点ZH 以'*sin 1cot '*''*6'*40'*2*)(*轴X 为JD'为原点ZH'以)cos (sin 1tan tan sin cos cos sin sin cos cos cos )cos(cos cos cos cos *240)(2*24)(tan *)(R L Y E HH Y X E ZH R L Y R L L X R L RR L R L L L R L R p R p R p R p R p R p R R L L L L m RL L p m p R T HH HH HH xHH xx HH x x x x x x x ==∙-=∙=-==-=∴+=-++=∴+=+=-==+++=+∴=+=+-+=+=++=ββββααθθααθθαθαθθαθθθθαθθβθθ 正方向建立坐标系非对称非完整缓和曲线JDA A ZH T AF JD A E HH EF A HH AF E JD EF E ZH JD ZH E JD R L L Y A HH Y X A ZH R L Y R L L X x HHHH HH HH HH∙+∙=∴=∙∙-+∙=∙=∙-∙=∙--=-=-=-=-=∴+==∙-=∙=-=3664'''236354112155212212121311sin sin *中F -JD -A 在三角形sin sin *'||||'中F -JD'-E 在三角形*2*sin 1cot **6*40ββββββπβαπββαβββββββββ 改正数切线标高设计标高改正值:里程差为任一点与起点或终点)(变坡点标高切线标高设计标高变坡点高程又变坡点竖曲线起点±==-±=-==∴-==∴===-=Rx y x i x T TK E R E R E R L T R T E i i *2*K *88*2*2*2竖曲线222221ωωωω。
缓和曲线上任意点坐标计算程序概要
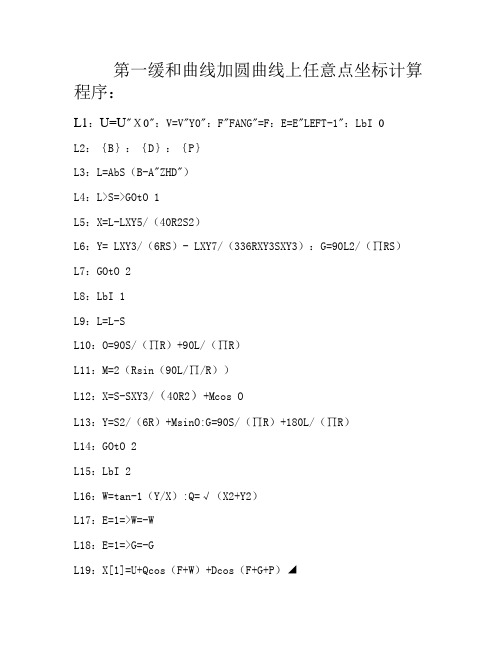
第一缓和曲线加圆曲线上任意点坐标计算程序:L1:U=U"X0":V=V"Y0":F"FANG"=F:E=E"LEFT-1":LbI 0L2:{B}:{D}:{P}L3:L=AbS(B-A"ZHD")L4:L>S=>GOtO 1L5:X=L-LXY5/(40R2S2)L6:Y= LXY3/(6RS)- LXY7/(336RXY3SXY3):G=90L2/(∏RS)L7:GOtO 2L8:LbI 1L9:L=L-SL10:O=90S/(∏R)+90L/(∏R)L11:M=2(Rsin(90L/∏/R))L12:X=S-SXY3/(40R2)+Mcos OL13:Y=S2/(6R)+MsinO:G=90S/(∏R)+180L/(∏R)L14:GOtO 2L15:LbI 2L16:W=tan-1(Y/X):Q=√(X2+Y2)L17:E=1=>W=-WL18:E=1=>G=-GL19:X[1]=U+Qcos(F+W)+Dcos(F+G+P)◢L20:Y[1]=V+Qsin(W+F)+Dsin(F+G+P)◢L21:GOtO 0注、、XO—为起点X坐标 EXE、YO—为起点Y坐标 EXE、F?—方位角 EXE、LEFT-1?—左偏取1右偏取0 EXE、B?—所求坐标点里程(起点输0时为到起点长度)EXE、ZHD?—为直缓点里程或直圆点里程(起点可以输0)EXE、S?—缓和曲线长、圆曲线时输为0 EXE、R?—半径EXE、D?—中桩到边桩长度EXE、P?—左右方向与中线切线交角、法线方向时左-90右+90 EXE、上述每一步输完后必须确认、结果显示字后转到B进行循环操作。
坐标反算L1:Lb1 0L2:{A}: A"X1":{B}:B "XO":{D}:D "Y1":{K}:K "YO"L3:X=A-BL4:Y=D-KL5:POI(X,Y)◢L6:Y>0=>W=W◢≠=>W=W+3600◢L7:GOtO 0注:①X1坐标EXE ③Y1坐标EXE②X0坐标EXE ④Y0坐标EXE求A点到B点方位角时A点为X01、该程序计算时可从切线起点ZH或ZY 算到圆曲线终点而另一半缓和曲线需重新倒转计算。
不对称缓和曲线要数的计算方法

精心整理不对称缓和曲线要数的计算方法????????? 发布日期:2012-02-12??浏览次数:52圆曲线两端缓和曲线不等长的测设方法,圆曲线起始端缓和曲线的长度为L1终端的缓和曲线长度为L2圆曲线半径为R,所测转角为a切线角切线增量内移值切线长曲线长或者外矢距Goto 1 ↙(注:↙表示按EXE键即可)2. XLZBZB使用说明:K? 正算时所求点的里程:L(-Z+Y) 正算时所求点距该里程中线的边距(左侧取负值,右侧取正值,在中线上取零(即数字0))3. 正算子程序程序名:SUB14→DimZ ↙(注:↙表示按EXE键即可)↙(注:↙表示按EXE键即可)I+J(Acos(G+QCJ(1÷P+CJD)×180÷π)+Bcos(G+QEJ(1÷P+EJD)×180÷π)+Z[4]cos(G+QZ[1]J(1÷P+Z[1]JD)×180÷π)+Bcos(G+Q(1-E)J(1÷P+(1-E)JD)×180÷π)+A cos(G+Q(1-C)J(1÷P+(1-C)JD) ×180÷π)) →X ↙段线元起点切线方位角→G: 二段线元终点里程→H: 二段线元起点曲率半径→P:二段线元终点曲率半径→R:二段线元左右偏标志→Q:…………………(注:如有多个曲线元要素,还要继续添加到数据库DAT中)I= 线元起点的X坐标:S= 线元起点的Y坐标: O= 线元起点里程:G= 线元起点切线方位角: H= 线元终点里程P= 线元起点曲率半径R= 线元终点曲率半径Q= 线元左右偏标志(注:左偏为-1,右偏为+1 )(注:如有多个曲线元要素,还要继续添加到数据库DAT中,曲率半径直径输入半径值)5. 坐标反算程序名:ZBFS“U=”:S÷666.667→U ▲ 亩Goto 1(注:0表示数字零)说明:点位必须按顺序输入成封闭形图型!A B C D 为第一,二两点坐标(常量),X Y……为第三,四,五,六点坐标(变量)。
3.1不对称缓和曲线加圆曲线逐桩坐标计算

T1
ZH HY 直线
缓和曲线
l01
圆曲线
T2
YH
缓和曲线
l02
直线
HZ
X HZ X JD T2 co(s HZ切) YHZ YJD T2 sin( HZ切)
曲线右偏时:K 1 曲线左偏时系上坐标
xp
y
p
l l5 l9
+ P1 _ sin
P2 α
则切线长
m1
=
l1 2
-
l13 240 R2
p = l12 1 24 R
m2
= l2 2
-
l23 240 R2
p = l22 2 24 R
T1
=
AJ
=(R
+P1)
tan
α 2
+m1
_
P1 _ P2 sin α
T2
=
DJ
=(R
+P2 )
tan
α 2
+m2
+ P1 _ sin
sin
T 2 DJ DF P1 P2
sin
则切线长
m1
=
l1 2
-
l13 240 R2
p = l12 1 24 R
m2
= l2 2
-
l23 240 R2
p = l22 2 24 R
T1
=
AJ
=(R
+P1)
tan
α 2
+m1
_
P1 _ P2 sin α
T2
=
DJ
=(R
+P2 )
tan
α 2
+m2
非对称缓和曲线坐标计算程序
非对称缓和曲线坐标计算程序CASIO fx-4800P QXZB曲线坐标计算CASIO4800 QXZB可计算不等缓和曲线、圆曲线上的任意中、边桩坐标:该程序适用于计算器 CASIO fx-4800P,可计算与线路中心成任意夹角的缓和曲线、圆曲线中、边桩坐标及待测点方位角和距离。
1、DK(JD)?输入交点桩号2、X(JD)?输入交点坐标X3、Y(JD)?输入交点坐标Y4、T1?输入第一切线长(如果只有一条切线两者都输入一致)5、T2?输入第二切线长(如果只有一条切线两者都输入一致)6、FWJ?输入直线方位角(ZH→JD)7、A?输入转角:左转为负,右转为正8、R?输入圆曲线半径9、LS1?输入第一缓和曲线长(如果只有一条缓和曲线两者都输入一致)10、LY?输入圆曲线长(L-LS1-LS2)11、LS2?输入第二缓和曲线长(如果只有一条缓和曲线两者都输入一致)12、X(ZJD)?输入置镜点坐标X13、Y(ZJD)?输入置镜点坐标Y14、JSDK?输入前视点里程15、PL?输入偏距16、PA?输入偏角程序下载地址:/blog/post/QXZB-4800.html评价答案好:18不好:1原创:18非原创:0菲メ帆ぅ回答采纳率:52.8% 2010-06-02 17:37满意答案好评率:57%(for Casio-fx4850)扩展变量操作(15个):Defm 15←┚ ( O为字母、0为数字)J-PQX (平面数据输入,自行切换到J-JSMS)Defm 15←┚A“JD” B“JDX” C“JDY” F“FWJ” O“A0:Z-,Y+” RE“LS1” K“LS2”:E<1=>E=1E-9⊿K<1=>K=1E-9⊿Z[1]=EE÷24R-E∧4÷2688RRR:Z[2]=E÷2-EEE÷240RR:X=(EE-KK)÷24R÷sin Abs O :“T1=”:Z[3]=(R+Z[1])tan(Abs O÷2)+Z[2]-X◢“T2=”:Z[4]=(R+KK÷24R-K∧4÷2688RRR)tan(Abs O ÷2)+K÷2-KKK÷240RR+X◢“L=”:L=Abs OπR÷180+(E+K)÷2◢J=tan-1((R+Z[1])÷(Z[3]-Z[2]):“E=”:X=(R+Z[1])÷sin J-R◢X=A-Z[3]:Y=X+E:E<1=>“ZY=”:X◢≠=> “ZH=”:X◢“HY=”:Y◢⊿ “QZ=”:Y =X+(L-K-E)÷2+E◢Y=X+L-K:X=X+L:K<1=> “YZ=”:X◢≠=> “YH=”:Y◢“HZ=”:X◢⊿Prog“J-JSMS” ←┚J-JSMS(放样模式主程序)“1-ZS, FY,3-FS”: Lb1 0:{Z}: Z“MS”≤2=>Goto 1: ≠=> Z≤4=> Goto2⊿⊿←┚Lb1 1 :Q“X-YIQI”S“Y-YIQI”T“X-HOUSI”U“Y-HOUSI”:{PDW}:P“F=”D“BZ=”W“BJ=”: Prog“JP”: Prog“FY”: Goto 1←┚Lb1 2 :{XYW}:XYW“BJ”: Prog“JF”: “P=”: P◢“BZ=”: D◢JP(平曲线正算子程序)Fixm←┚Lb1 1 :J=F:X= B-Z[3]cos F :Y= C-Z[3]sin F :G=E←┚P≤A-Z[3]=>I=A-Z[3]-P:M=-I:N=0:H=F+W:Goto 5←┚≠=>P≤A-Z[3]+E=>I=P-A+Z[3]:H=90II÷REπ:O<0=>H=-H⊿H=H+W+F:Goto 3←┚≠=>P≤A-Z[3]+L-K=>I=P-A+Z[3]-E:Goto 4: ≠=>Goto 2⊿⊿←┚Lb1 2 :X= B+Z[4]cos(F+O :Y= C+Z[4]sin(F+O :J=F+O+180:G=K←┚P≤A-Z[3]+L=>I=A-Z[3]+L-P:H=90II÷RKπ:O>0=>H=-H⊿H=H+J+W+180:Goto 3 ←┚≠=>I=P-A+Z[3]-L:M=-I:N=0:H=J+W+180:Goto 5 ←┚Lb1 3 :M=I-I∧5÷40RRGG:N=III÷6GR-I∧7÷336RRRGGG:Goto 5 ←┚Lb1 4 :H=(E+2I)×90÷πR:M=R sin H+Z[2]:N=R(1-cos H)+Z[1]:O<0=>H=-H⊿H=J+H+W: Goto 5←┚Lb1 5 :P≤A-Z[3]+L-K=> O<0=>N=-N⊿≠=>O>0=>N=-N⊿⊿Goto 6←┚Lb1 6 :X =X+M cos J-N sin J+D cos H:Y =Y+M sin J+N cos J+D sin H“X=”: X ◢“Y=”: Y ◢JF(平曲线反算子程序)Fixm←┚U=X:V=Y:D=0:J=F-W:P=A+(Y-C)cos J-(X-B)sin J←┚Lb1 1:Prog“JP”:J=H-180:I=(V-Y)cos J-(U-X)sin J:Abs I<1E-4=>Goto 2:≠=>P=P+I:Goto 1⊿←┚Lb2: D=(V-Y)÷sinHFY(放样计算子程序)Pol(T-Q,U-S):“HOUSI D=”:I◢J<0=>J=J+360⊿J>360=>J=J-360⊿“HOUSI J=”:J→DMS◢Pol(X-Q,Y-S):“I=”:I◢J<0=>J=J+360⊿J>360=>J=J-360⊿“J=”:J→DMS◢一、程序简介本套程序是共有2个主程序,3个子程序。
缓和曲线坐标计算公式
-1
4、第二缓和曲线(HZ—YH)内任意点坐标
L
缓和曲线上任一点坐标 求解 缓和曲线上任一点里程 1248.535 X Y
缓和曲线上任一点至HZ 点的曲线长
R 曲线半径 250.000
ξ 转角符号右转为 正,左转为负
LS 缓和曲线长 50.000
X 切线横距 49.950
50.000
X=XHZ+x/COS(30L2/π /R/LS)*COS(A2+180-ξ 30L2/π /R/LS) Y=YHZ+x/COS(30L /π /R/LS)*SIN(A2+180-ξ 30L /π /R/LS)
L
缓和曲线上任一点坐标 求解 缓和曲线上任一点里程 1047.435 X Y
缓和曲线上任一点至ZH 点的曲线长
R 曲线半径 250.000
ξ 转角符号右转为 正,左转为负
LS 缓和曲线长 50.000
X 切线横距 49.950
50.000
X=XZH+x/COS(30L2/π /R/LS)*COS(A1+ξ 30L2/π /R/LS) Y=YZH+x/COS(30L /π /R/LS)*SIN(A1+ξ 30L /π /R/LS)
缓和曲线上任一点至YH 点的曲线长
R 曲线半径 250.000
ξ 转角符号右转为 正,左转为负
LS 缓和曲线长 50.000 40747.086 90617.154
0.000
X=XYH+2RSIN(90L/π /R)*COS(A2+180-ξ 90(L+LS)/π /R Y=YYH+2RSIN(90L/π /R)*SIN(A2+180-ξ 90(L+LS)/π /R
不对称缓和曲线的测设方法
不对称缓和曲线的测设方法·52·东北公路2002年不对称缓和曲线的测设方法付胜余魏明祥李文鑫(辽宁省交通勘测设计院,沈阳110005) )摘要本文就不对称缓和曲线在公路中的测设问题进行了分析,并提出了计算公式和应用。
关键词缓和曲线测设应用1 前言在山岭重丘区的公路建设中,由于地形条件的限制,路线线形常常采用增长或缩短切线长度的方法来满足规范中对于曲线间直线长度的要求。
这样就会遇到不对称缓和曲线的测设问题。
在高等级公路中,不对称缓和曲线常常设置于基本型曲线内,而在低等级公路中,较常见的是在回头曲线内设置不对称缓和曲线。
在一般资料中有关这方面的内容介绍很少,且所述方法不直观,计算过程较为繁杂,故在实际应用中较为麻烦。
笔者在长期的线形研究过程中总结出了计算方便、思路简洁,且其曲线要素计算公式与对称缓和曲线的要素公式可形成统一形式的便捷方法,特作一介绍。
2 基本型曲线中不对称缓和曲线的设置图1 基本型曲线中不对称缓和曲线如图1所示,设曲线要素LS1、LS2、R及偏角α为已知,其它曲线要素如p1、p2、q1、q2均可通过一般的公式计算。
由于两缓和曲线的长度不一样,因而设置缓和曲线后圆曲线半径的内移值不同,此时的圆心不可能象对称型布置时一样,落在内夹角的平分线上,圆心到两导线的垂直距离分别为R +p1 ,R +p2 ,如图1所示。
MA = R +p1MB = R +p2T1 =AO +q1T2 =BO +q2由几何关系计算可得:MBAO = [cos(180 -α) + MA]/ tg (180 -α) MB MAsin (180 -α) +tg (180 -α)R +p2 R +p1=sin (180 -α) +tg (180 -α)R(1 -cosα) p2 -p1cosα =+sinαsinααp2 -p2cosα= Rtg +2 sinα同理可得:αp1 -p2cosαBO=Rtg +2 sinα综上可得:αp2 -p1cosαT1=Rtg +2 sinα(1)αp1 -p2cosαT2=Rtg + +q22 sinα当p1 =p2即Ls1 = Ls2时,T= T=1= T2= (R+ αP)tg +q2由此可知,对称缓和曲线的切线长是公式(1)的一个特例。
3.1不对称缓和曲线加圆曲线逐桩坐标计算讲解
β2 = l2 180 2R π
主点里程
kZH = K JD T1
K HY K ZH l1
K YH K ZH L l 2
K HZ K ZH L
二、不等长的缓和曲线逐桩坐标计算 1、已知条件: (1)设计文件所给已知条件:
交点坐标及里程、曲线半径R、第一缓和曲线长、第二缓和曲线 长、转向角、ZH点切线方位角。
CF DF ( R P2 ) tan
T 1 AJ AG
2
m1
2
m2
P1 P2 sin
P1 P2 sin
T 2 DJ DF
则切线长
l1 l m1 = 2 240R 2
3 1
l1 p1 = 24R
2 2
2
l2 l m2 = 2 240R 2
子情境3:特殊曲线测量
3.1 不等长的缓和曲线+圆曲线逐桩坐标计算
3.1不等长缓和曲线逐桩坐标计算
JD
T1
缓和曲线
T2
圆曲线
直线
ZH
1 l0
HY
YH
缓和曲线
l02
HZ
直线
不等长的缓和曲线+圆曲线通常敷设在地形复杂地
区以及铁路旧线改造中(如图)。 其组成为:直线-缓和曲线(A1)-圆曲线-缓和曲 线(A2)-直线
X P X HZ x P cos ky P sin P sin ky P cos YP YHZ x
k 1曲线右偏时 K 1曲线左偏时
360 HZ切
(2)地面上的已知条件:
导线点坐标及高程、导线控制点的实际位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非对称缓和曲线坐标计算程序
CASIO fx-4800P QXZB曲线坐标计算
CASIO4800 QXZB可计算不等缓和曲线、圆曲线上的任意中、边桩坐标:
该程序适用于计算器 CASIO fx-4800P,可计算与线路中心成任意夹角的缓和曲线、圆曲线中、边桩坐标及待测点方位角和距离。
1、DK(JD)?输入交点桩号
2、X(JD)?输入交点坐标X
3、Y(JD)?输入交点坐标Y
4、T1?输入第一切线长(如果只有一条切线两者都输入一致)
5、T2?输入第二切线长(如果只有一条切线两者都输入一致)
6、FWJ?输入直线方位角(ZH→JD)
7、A?输入转角:左转为负,右转为正
8、R?输入圆曲线半径
9、LS1?输入第一缓和曲线长(如果只有一条缓和曲线两者都输入一致)
10、LY?输入圆曲线长(L-LS1-LS2)
11、LS2?输入第二缓和曲线长(如果只有一条缓和曲线两者都输入一致)
12、X(ZJD)?输入置镜点坐标X
13、Y(ZJD)?输入置镜点坐标Y
14、JSDK?输入前视点里程
15、PL?输入偏距
16、PA?输入偏角
程序下载地址:
/blog/post/QXZB-4800.html
评价答案
好:18
不好:1
原创:18
非原创:0
菲メ帆ぅ
回答采纳率:52.8% 2010-06-02 17:37
满意答案
好评率:57%
(for Casio-fx4850)
扩展变量操作(15个):Defm 15←┚ ( O为字母、0为数字)
J-PQX (平面数据输入,自行切换到J-JSMS)
Defm 15←┚
A“JD” B“JDX” C“JDY” F“FWJ” O“A0:Z-,Y+” RE“LS1” K“LS2”:
E<1=>E=1E-9⊿K<1=>K=1E-9⊿Z[1]=EE÷24R-E∧4÷2688RRR:Z[2]=
E÷2-EEE÷240RR:X=(EE-KK)÷24R÷sin Abs O :“T1=”:Z[3]=(R+Z[1])tan(Abs O÷2)+Z[2]-X◢“T2=”:Z[4]=(R+KK÷24R-K∧4÷2688RRR)tan(Abs O ÷2)+K÷2-KKK÷240RR+X◢
“L=”:L=Abs OπR÷180+(E+K)÷2◢
J=tan-1((R+Z[1])÷(Z[3]-Z[2]):“E=”:X=(R+Z[1])÷sin J-R◢
X=A-Z[3]:Y=X+E:E<1=>“ZY=”:X◢
≠=> “ZH=”:X◢
“HY=”:Y◢
⊿ “QZ=”:Y =X+(L-K-E)÷2+E◢
Y=X+L-K:X=X+L:K<1=> “YZ=”:X◢
≠=> “YH=”:Y◢
“HZ=”:X◢
⊿Prog“J-JSMS” ←┚
J-JSMS(放样模式主程序)
“1-ZS, FY,3-FS”: Lb1 0:{Z}: Z“MS”≤2=>Goto 1: ≠=> Z≤4=> Goto2
⊿⊿←┚
Lb1 1 :Q“X-YIQI”S“Y-YIQI”T“X-HOUSI”U“Y-HOUSI”:{PDW}:P“F=”D“BZ=”W“BJ=”: Prog“JP”: Prog“FY”: Goto 1←┚
Lb1 2 :{XYW}:XYW“BJ”: Prog“JF”: “P=”: P◢
“BZ=”: D◢
JP(平曲线正算子程序)
Fixm←┚
Lb1 1 :J=F:X= B-Z[3]cos F :Y= C-Z[3]sin F :G=E←┚
P≤A-Z[3]=>I=A-Z[3]-P:M=-I:N=0:H=F+W:Goto 5←┚
≠=>P≤A-Z[3]+E=>I=P-A+Z[3]:H=90II÷REπ:O<0=>H=-H⊿H=H+W+F:Goto 3←┚
≠=>P≤A-Z[3]+L-K=>I=P-A+Z[3]-E:Goto 4: ≠=>Goto 2⊿⊿←┚
Lb1 2 :X= B+Z[4]cos(F+O :Y= C+Z[4]sin(F+O :J=F+O+180:G=K←┚
P≤A-Z[3]+L=>I=A-Z[3]+L-P:H=90II÷RKπ:O>0=>H=-H⊿H=H+J+W+180:Goto 3 ←┚
≠=>I=P-A+Z[3]-L:M=-I:N=0:H=J+W+180:Goto 5 ←┚
Lb1 3 :M=I-I∧5÷40RRGG:N=III÷6GR-I∧7÷336RRRGGG:Goto 5 ←┚
Lb1 4 :H=(E+2I)×90÷πR:M=R sin H+Z[2]:N=R(1-cos H)+Z[1]:O<0=>H=-H⊿H=J+H+W: Goto 5←┚
Lb1 5 :P≤A-Z[3]+L-K=> O<0=>N=-N⊿≠=>O>0=>N=-N⊿⊿Goto 6←┚
Lb1 6 :X =X+M cos J-N sin J+D cos H:Y =Y+M sin J+N cos J+D sin H
“X=”: X ◢。