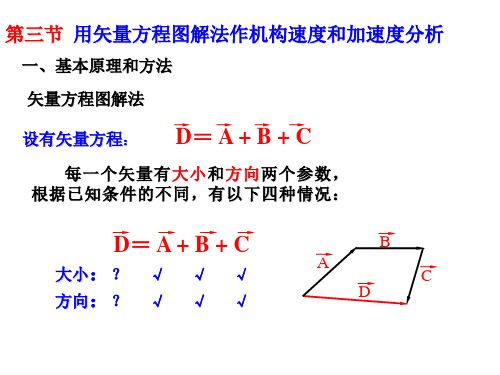
用矢量方程图解法作运动分析
第三章 机构的运动分析--相对运动矢量方程图解法

√ √
2
aB2
哥氏加速度是动点B1相对构件2运动 时,由于构件2的牵连运动为转动而产生 的附加加速度。
注意问题
1)、同一构件上两点间的运动
vA
vB 已知:A点运动,B点的运动方向。 求:B点运动的大小。 vBA 解:
vA
v 方向:
大小: ?
B
v
?
A
v BA
aA
aB
a
大小:?
aA
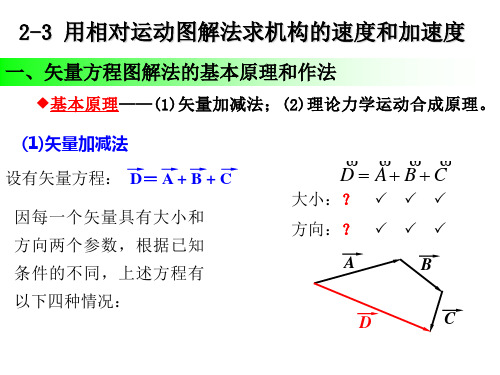
§3-2矢量方程图解法
相对运动图解法
准备工作
由理论力学可知,构件的平面运动可看成构件上
任一点(称为基点)的牵连移动和该构件的相对转动 所组成;牵连移动的速度和加速度等于基点的速度和 加速度,绕基点的相对转动角速度和角加速度等于该 构件的角速度和角加速度。
根据这一相对运动原理可列出构件上任一点的矢
求: 2 , 3 , 2 , 3 ,
1 A
E
3 D
1
4
v
E
和 aE 。
C B 1 2
解:
E
3
A
b
c
1
4
p
D 选 ,任找一点P(
V
CD AB CB 方向: 大小: ? lAB1 ?
v v v
C B
CB
v
绝对速度为零的点)。 pc V v C 3 (逆)
1
2
1
2
1
vA vA vA
1 2
3
3
2 (A1A2A3)
A
aA aA aA
1 2
3
1 2
3
第3.3节 用矢量方程图解法作运动分析
c
速度多边形的用途 由两点的速度求构件上任意点的速度 C A 例如,求BC中间点E的速度VE 时,bc上 中间点e为E点的影像,连接pe就是VE a p ω E B
e b
c
2、同一构件上两点加速度之间的关系 设已知角速度ω ,A点加速度,求B点的加速度 A B两点间加速度之间的关系有: A
BA
C ω B aB
2 2 2
方向:顺时针
+ω +ω +ω
4 4 4
= μ aa’b’ = μ a a’c’ = μ a b’c’ A p’ ω α aA C
B
aB
得:a’b’/ lAB=b’c’/ lBC= a’ c’/ lCA
∴△a’b’c’∽△ABC
p’a’b’c’-加速度多边形(或速度 图解), p’-极点 加速度多边形的特性: ①联接p’点和任一点的向量代表该 点在机构图中同名点的绝对加速 度,指向为p’→该点。
VB B
2
VB B
2
1
1
VB
2
2
B(B1,B2)
vB2 vB1 vB2B1
VB
1
1
A
ω1
VB B
2
VB B
2
1
1
VB
:
aB2 aB1 a k B2B1 a r B2B1
2
2
B(B1,B2)
VB
aB1 a n B1 a t B1
等速
1
1
A
ω1
④极点p’代表机构中所有加速度为零的点。 用途:根据相似性原理由两点的加速度求任 意点的加速度。 例如,求BC中间点E的加速度aE 时,b’c’上中间
矢量方程图解法对机构运动分析1

《机械原理》第三章平面机构运动分析——矢量方程图解法对机构运动分析(1)矢量方程图解法(相对运动图解法)依据的原理理论力学中的运动合成原理同一构件两点间的运动关系两构件重合点间的运动关系ω1A D C1432B C B CB v v v =+2121C C C C v v v =+矢量方程图解法(相对运动图解法)依据的原理理论力学中的运动合成原理同一构件两点间的运动关系两构件重合点间的运动关系1、根据运动合成原理列出矢量方程2、根据矢量方程图解条件作图求解基本作法二、同一构件两点间的运动分析运动合成原理:连杆上任一点(如C 点)的运动,可以看作是随同该构件上另一点B 的平动(牵连运动)和绕该点的转动(相对运动)的合成。
已知图示曲柄滑块机构原动件AB 的运动规律和各构件尺寸。
求:①图示位置连杆BC 的角速度和其上各点速度。
②连杆BC 的角加速度和其上C 点加速度。
理论力学大小:方向:?ω1l AB ?∥xx ⊥AB ⊥BC cp★求V C①由运动合成原理列矢量方程式CB B C v v v +=v B ω2②确定速度图解比例尺μv ( (m/s)/mm)/B v pb v μ=b2CB CB l ω=v (逆时针方向)2CB CBl ω=v C v v pc μ=CB v v bc μ=③作图求解未知量:大小:方向:c p★求V Ev B ω2bE v v peμ=?√ ??⊥AB ⊥EBE B EB v v v =+C EC v v =+∥xx ⊥EC √ ?e 速度多边形极点m/sc pv B ω2be 速度多边形极点①由极点p 向外放射的矢量代表相应点的绝对速度,极点p 的速度为零;②连接极点以外其他任意两点的矢量代表构件上相应两点间的相对速度,其指向与速度的下角标相反;③因为△BCE 与△bce 对应边相互垂直且角标字母顺序一致,故相似,所以图形bce 称之为图形BCE 的速度影像。
CB B C v v v +=C v v pc μ=速度影像。
机械原理 第二章-2相对运动图解、解析
1
3
aC1n c2 (c3) aC1t 4 D
A
4 P c1
一步减少未知数的个数。
n t k r aC2 aC3D aC3D aC1 aC2C1 aC2C1
2 3 l3
大小: 方向:
? 3l3
√ √
21vC 2C 1 ?
√ ∥AB
C→D ⊥CD
2) 取速度比例尺a , 作 加速度多边形。
P
c1
( 顺时针 )
2. 加速度分析:
1) 依据原理列矢量方程式 分析:
aC2 = aC1 + aC2C1
B
2 C akC2C1
当牵连点系(动参照系)为 转动时,存在科氏加速度。 3
D 4
ω1
1
1
c2 (c3)
r k aC2C1 aC2C1 aC2C1
科氏加速度
A
4 P c1
k r a 2 v
√
√
22lBC
C→B
?
⊥BC
b) 根据矢量方程式,取加速度比例尺
a
实际加速度
c´ 图示尺寸
m/
s2
p
mm
, 作矢量多边形。
c e b
p
极点
n
b
由加速度多边形得:
aC a pc m / s2
t 2 aCB l BC a nc l BC
同样,如果还需求出该构件上E 点的加速度 aE,则
pe 则代表 aE
由加速度多边形得:
p c´ n
aE pea
△b’c’e’ ~ △BCE , 叫 做
△BCE 的加速度影像,字 母的顺序方向一致。
专题:矢量图解运动问题
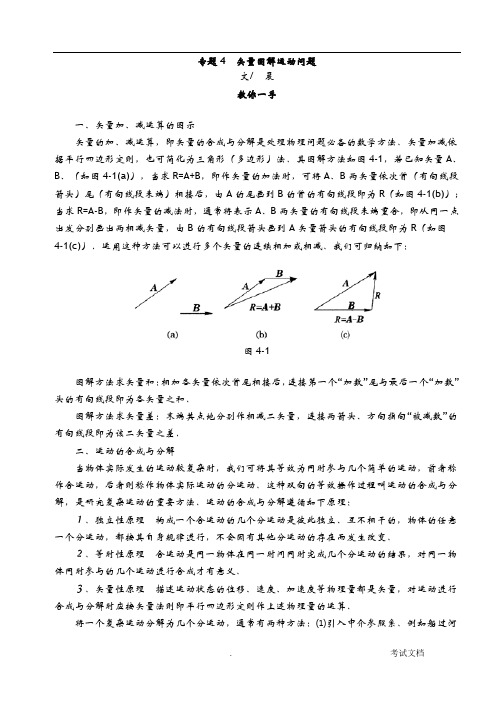
专题4矢量图解运动问题文/晨教你一手一、矢量加、减运算的图示矢量的加、减运算,即矢量的合成与分解是处理物理问题必备的数学方法.矢量加减依据平行四边形定则,也可简化为三角形(多边形)法.其图解方法如图4-1,若已知矢量A、B、(如图4-1(a)),当求R=A+B,即作矢量的加法时,可将A、B两矢量依次首(有向线段箭头)尾(有向线段未端)相接后,由A的尾画到B的首的有向线段即为R(如图4-1(b));当求R=A-B,即作矢量的减法时,通常将表示A、B两矢量的有向线段未端重合,即从同一点出发分别画出两相减矢量,由B的有向线段箭头画到A矢量箭头的有向线段即为R(如图4-1(c)).运用这种方法可以进行多个矢量的连续相加或相减.我们可归纳如下:图4-1图解方法求矢量和:相加各矢量依次首尾相接后,连接第一个“加数”尾与最后一个“加数”头的有向线段即为各矢量之和.图解方法求矢量差:末端共点地分别作相减二矢量,连接两箭头、方向指向“被减数”的有向线段即为该二矢量之差.二、运动的合成与分解当物体实际发生的运动较复杂时,我们可将其等效为同时参与几个简单的运动,前者称作合运动,后者则称作物体实际运动的分运动.这种双向的等效操作过程叫运动的合成与分解,是研究复杂运动的重要方法.运动的合成与分解遵循如下原理:1.独立性原理构成一个合运动的几个分运动是彼此独立、互不相干的,物体的任意一个分运动,都按其自身规律进行,不会因有其他分运动的存在而发生改变.2.等时性原理合运动是同一物体在同一时间同时完成几个分运动的结果,对同一物体同时参与的几个运动进行合成才有意义.3.矢量性原理描述运动状态的位移、速度、加速度等物理量都是矢量,对运动进行合成与分解时应按矢量法则即平行四边形定则作上述物理量的运算.将一个复杂运动分解为几个分运动,通常有两种方法:⑴引入中介参照系.例如船过河的运动,是以静止的河岸为参考的一个复杂运动,我们可以取一个动参考物——运动的河水为中介,那么,船的运动可分解为船相对水的运动与水相对岸的运动.若设质点A对静止参考系C的速度(绝对速度)为v AC,动参考系B对C的速度(牵连速度)为v BC,而A对动参考系B的速度(相对速度)为v AB,则有v AC=v AB+v BC,v AB=v AC-v BC.同样地,我们可以按这种方法进行位移或加速度的合成与分解,例如,a AC=a AB+a BC,a AB=a AC-a BC.注意矢量运算式中下标的规律性.⑵依据实际效果分解运动.例如一架飞机以速度v与水平成θ角斜向上飞行,实际效果是在上升的同时水平向前移动了,我们可将飞机的运动分解为竖直方向与水平方向的两个分运动,若这两个分运动的速度依次为v1和v2,则有v=v1+v2.处理相对运动等复杂运动时,涉及速度、位移或加速度等矢量的加减运算,若用矢量图助解常会收到奇效.例1假定某日刮正北风,风速为u,一运动员在风中跑步,他对地面的速度大小是v,试问他向什么方向跑的时候,他会感到风是从自己的正右侧吹来的?这种情况在什么条件下成为无解?在无解的情况下,运动员向什么方向跑时,感到风与他跑的方向所成夹角最大?分析与解设风相对于人的速度(即运动员感到的风速)为V,根据题给条件,有u=V+v.三个速度矢量中,u大小、方向均确定,v大小一定,V与v两矢量互相垂直(所谓正右侧),故可断定三个矢量所构成的满足题意要求的关系三角形应为直角三角形.如图4-2,取一点O,先作矢量u,以其矢端为圆心,表示v大小的线段长为半径作一圆,自O点向圆引切线OA,则矢量三角形△OO′A即为符合题意要求的u、V、v关系.由图显见,当运动员朝南偏西θ=arccos(v/u)方向以速率v奔跑时会感觉风从自己右侧吹来,并且在v<u时才可能有这种感觉.若v>u,绝对风速、风相对人的速度及人奔跑速度关系如图4-3,在△OO′A′中运用正弦定理有(v/sinβ)=(u/sinα),可知当β=(π/2)时,α=arcsin(u/v)为最大,即在运动员向西偏南arcsin(u/v)方向奔跑时感觉风与自己跑的方向所成夹角最大.图4-2 图4-3例2一只木筏离开河岸,初速度为v,方向垂直于岸,划行路线如图4-4虚线所示,经过时间T,木筏划到路线上A处,河水速度恒定为u,且木筏在水中划行方向不变.用作图法找到2T、3T……时刻此木筏在航线上的确切位置.图4-4分析与解设木筏相对于水的速度为V,则离岸时,V=v-u,其矢量关系如图4-5(a)所示,该图同时给出了此后木筏复合运动的速度情况:木筏相对于水的速度V方向不变、大小是变化的;木筏的绝对速度v大小、方向均有变化.故而我们看到木筏的运动轨迹为一曲线.现如图4-5中(b)所示,连接OA的有向线段是时间T木筏的绝对位移s木,而s木=s木对水+s水,其中s水沿x正方向,s木对水平行于V方向.现作满足上式关系的位移矢量三角形,在x轴上得到B点,有向线段OB即为s水.由于水速u恒定,则各T时间s水恒定,故可在x轴上得OB′=2s水,OB″=3s水,过B′、B″点……作平行于V的直线交木筏轨迹于A′、A″……各点,即得2T、3T……时刻此木筏的确切位置.质点做变速运动时,若初速度为v0,末速度为v t,则速度增量Δv=v t-v0,这是一个矢量相减运算,其图解关系如图4-1(c),利用这种矢量关系图解速度增量问题有其独到之处.图4-5例3某一恒力作用在以恒定速度v运动的物体上,经过时间t,物体的速率减少一半,经过同样的时间速率又减少一半,试求经过了3t时间后,物体的速度v3t之大小.图4-6分析与解由于物体受恒力作用,故在相同时间,速度增量相同即Δv=v t-v=v2t-v t=v3t -v2t.现作满足题给条件的矢量图如图4-6所示,图中有向线段AB=BC=CD=Δv,OB=v t,v t=(v/2),OC=v2t,v2t=(v/4),OD为待求量v3t.设恒力方向与v方向成π-α角,由图给几何关系,在△OAB、△OAC、OAD中运用余弦定理,得(v/2)2=v2+Δv2-2v·Δv·cosα,(v/4)2=v2+(2Δv)2-2v·2Δv·cosα,v3t2=v2+(3Δv)2-2v·3Δv·cosα.由此方程组可解得物体在恒力作用3t时间后的速度大小为v3t=(/4)v.例4从h高处斜向上抛出一初速度大小为v0的物体,讨论抛出角θ为多大时物体落地的水平位移最大.分析与解物体做抛体运动时,只受重力作用.在落下h高度的时间t,速度增量Δv恒为竖直向下,大小为gt,落地时速度v的大小为,v0、v t与与Δv构成如图4-7所示矢量三角形关系.图中θ角、α角分别是初速度、落地速度与水平方向的夹角.注意到在矢量三角形的面积S△=(1/2)gt·v0cosθ式中,v0tcosθ即为抛体飞行的水平位移x,则有S=(1/2)gx.这样,我们只须考虑何时矢量三角形有最大面积即可.由于S△=(1/2)△v0·vtsin(θ+α),而v0、v t大小确定,则当(θ+α)=90°,即θ=arctan(v/)时,S△有最大值:(1/2)gx=(1/2)v0·vt,亦即物体飞行的水平位移将达到最大,0其值为xm=(v0/g).图4-7例5网球以速度v0落到一重球拍上后弹性地射回.为使球能沿着与原轨道垂直的方向射回,球拍应以什么样的速度vP运动?如果速度v0和球拍面的法线的夹角是α,速度vP和此法线的夹角φ是多少?设任何时刻球拍和球都是做平动的.分析与解本题求解的关键是作满足题给条件的矢量关系图,而矢量图的完成又有赖于准确地把握各矢量间的关系,题中给出了三个重要的关于矢量间关系的隐含条件:第一,重球拍的“重”告诉我们,可以认为拍的速度vP在碰球前后保持不变;第二,网球是弹性地射回,则告诉我们在碰撞前后,球相对于拍的速度大小相等、方向相反;第三,由于球和拍都是作平动的,故球相对于拍只有沿拍面法向速度而无切向速度分量.现取球拍面之法线为x轴,使y轴沿拍面,O为网球入射点,如图4-8所示,从O点沿与x轴成α角方向作有向线段OA=v0,作射线OP⊥OA,从A点作x轴平行线交OP于B,取AB中点C,则有向线段OB 即是球离拍时的速度v t,有向线段OC则是球拍速度vP,而有向线段CA、CB则是射入时球对拍速度v0-vP和弹回时球对球拍速度v t-vP,前面已经分析到,它们是等值、反向且沿球拍法向的.根据所作的矢量图,在直角三角形OAB中,斜边上的中线OC=(AB/2),AB=(OA/cosα).故vP=(v0/2cosθ),而球拍速度与球拍法线方向夹角为φ=2((π/2)-α)=π-2α.图4-8小试身手1.甲、乙两船在静水中航行速度分别为v和v乙,两船从同一渡口向河对岸划去.已知甲甲船想以最短时间过河,乙船想以最短航程过河,结果两船抵达对岸的地点恰好相同,则甲、乙两船渡河所用时间之比t甲∶t乙=_____________.2.骑自行车的人以20km/h的速率向东行驶,感到风从正北方吹来,以40km/h的速率向东行驶,感到风从东北方向吹来,试求风向和风速.3.从离地面同一高度h、相距l的两处同时各抛出一个石块,一个以速度v1竖直上抛,另一个石块以速度v2向第一个石块原来位置水平抛出,求这两个石块在运动过程中,它们之间的最短距离.4.如图4-9所示,一条船平行于平直海岸线航行,船离岸的距离为D,船速为v0,一艘速率为v(v<v0)的海上警卫小艇从港口出发沿直线航行去拦截这条船.图4-9(1)证明小艇必须在这条船驶过海岸线的某特定点A之前出发,这点在港口后面的(/v)·D处.(2)如果快艇在尽可能迟的瞬时出发,它在什么时候和什么地方截住这条船?5.一辆汽车的正面玻璃一次安装成与水平方向倾斜角为β1=30°,另一次安装成倾斜角度为β2=15°,问汽车两次速度之比v1∶v2为多少时,司机看见冰雹两次都是以竖直方向从车的正面玻璃上弹开?(冰雹相对地面是竖直下落的)6.敞开的旋转木马离转动轴距离为r,以角速度ω转动,人站在木马上.下雨了,雨滴以速度v0竖直下落.试问人应该怎样支撑着雨伞才能够最有效地避开雨?7.如图4-10所示为从两列蒸汽机车上冒出的两股汽雾拖尾的照片(俯视).两列车沿直轨道分别以速度v1=50km/h和v2=70km/h行驶,行驶方向如图所示.求风速.图4-108.磁带录音机的空带轴以恒定角速度转动,重新绕上磁带.绕好后带卷的末半径r末为初半径r初的3倍.绕带的时间为t1.要在相同的带轴上重新绕上厚度为原磁带一半的薄磁带,问需要多少时间?9.在听磁带录音机的录音时发觉:带轴上带卷的半径经过时间t1=20min减小一半.问此后半径又减小一半需要多少时间t2?10.快艇系在湖面很大的湖的岸边.湖岸线可以认为是直线.突然缆绳断开,风吹着快艇以恒定的速度v0=2.5km/h沿与湖岸成α=15°角的方向飘去.同时岸上一人从同一地点沿湖岸以速度v1=4km/h行走或在水中以速度v2=2km/h游去,此人能否赶上快艇?当快艇速度为多大时总可以被此人赶上?11.如图4-11所示,在仰角α=π/6的雪坡上举行跳台滑雪比赛.运动员从坡上方A点开始下滑,到起跳点O时借助设备和技巧,保持在该点的速率而以与水平成θ角的方向起跳,最后落在坡上B点,坡上O、B两点距离L为此项运动的记录.已知A点高于O点h=50m,忽略各种阻力、摩擦,求运动员最远可跳多少米,此时起跳角为多大?图4-1112.一条在湖上以恒定速度行驶的船上,有一与船固连的竖直光滑墙壁,有一个小球沿水平方向射到墙上,相对于岸,小球速度的大小为v1,方向与墙的法线成60°角,小球自墙反弹时的速度方向正好与小球入射到墙上时的速度方向垂直.问船的速度应满足什么条件?设小球与墙壁的碰撞是完全弹性的.参考答案1.甲、乙船速度矢量关系如图答4-1,两船航程相同,由图得(t甲/t乙)=(v2乙/v2甲).图答4-1 图答4-22.速度矢量v 风=v 风对人+v 人的关系如图答4-2,由图易得v 风≈28km/h .3.以竖直上抛的石块为参考系,另一石块以相对速度v 21做匀速直线运动,速度矢量关系如图答4-3,由图知v21=,两石块最短距离d=l·sinθ=(v1/)l,这个最短距离适用于另一石块落地之前,即(lcosα)/()=(lv2)/(v12+v22)≤时.图答4-3 图答4-44.(1)艇相对船的速度方向不会超过θ,如图答4-4所示,cotθ=(/v),A 点、港口间的连线与岸的夹角即两者相对位移方向不超过θ,则A 点在港口后面s=D·cotθ=(/v)D .(2)当v 相对=时,根据题目要求,此时s 相对(D/sinθ)=(D v0/v),t=(D v0/v0),截住船的位置在A 前方v0t=(D v02/)处.5.冰雹落向车的速度与弹离车速度遵守“反射定律”,故汽车以v 1运动时,v 雹近车的方向与车玻璃法线成β1,汽车以v 2运动时,则成β2角,各速度矢量关系如图答4-5,由如图答4-5所示的甲、乙两图分别有v1=v雹cot30°,v2=v雹cot60°,则(v1/v2)=(3/1).图答4-56.v 人=rω,v 雨=v 0,v 雨对人=v 雨-v 人,矢量关系如图答4-6所示,由图可知,相对于人,雨的速度方向为θ=arctan[(rω)/v0],此即撑伞方向.图答4-6 图答4-77.观察照片,将两车之距离AB按5∶7比例分成左、右两部分,分点C为两车相遇处,汽雾交点为O,CO即为相遇时两车喷出之汽被风吹后的位移,两车从相遇点C到照片上位置历时t=AB/(v1+v2),风速为CO/t≈35km/h.8.如图答4-8所示,设磁带的总长l,由题意当带厚为d时有ld=π(9r初2-r初2),当带厚为(d/2)时有l(d/2)=π(R2-r初2),得绕好后带卷半径R=r初,因t1=(2r初/d)(2π/ω);t2=((-1)r初/d/2)·(2π/ω),得t2=(-1)t1.9.与上题不同的是,放音时磁带是匀速率地通过的,t1=(π(4r2-r2)/dv),t2=(π(r2-(1/4)r2)/dv),则t2=(t1/4)=5min.图答4-8 图答4-910.作快艇与人运动的位移矢量图,人赶上艇,两者位移矢量构成闭合三角形如图答4-9,设人以v1速度运动时间x,以v2速度运动时间y,则有(2y)2=(4x)2+[2.5(x+y)]2-2×4x×2.5(x+y)cos15°,整理得[89-20(+)]x2+[50-20(+)]xy+9y2=0,因Δ=[50-20(+)]2-4×9[89-20(+)]>0,此式有解,即人能赶上以2.5km/h飘行的快艇;推至一般,只要(2y)2=(4x)2+[v(x+y)]2-2×4x×v(x+y)cos15°式成立,即,只要Δ=(-1)v2-2(+)v+16≥0,v≤2km/h总可赶上.11.如图答4-10所示.x=Lcosα,x=v0cosθt,y=Lsinα.y=(1/2)gt2-v0tsinθ.图答4-10 图答4-11y/x=tanα=[(1/2)gt-v0sinθ]/(v0cosθ)t=[2(tanαv0cosθ+v0sinθ)]/g,代入x=v0cosθt,v0=10m/s,α=(π/6),g=10m·s-2x=v0cosθ(2(tanαv0cosθ+v0sinθ))/g=2v02(tanα·cos2θ+sinθcosθ/g).=100(/3)+100(sin2θ+(/3)cos2θ)由asinθ+bsinθ=sin(2θ+arctan(b/a)),得上式=100(/3)+100·sin(2θ+(π/6)).当2θ=(π/3)时,L最大,则θ=(π/6),代入得Lmax=100(m).12.设船速为v0,因为弹性碰撞,小球相对墙的入射速度与反射速度大小相等,速度方向遵守“入射角与反射角”,如同例5作矢量关系图如图答4-11,由图知只要v0沿墙的法线方向分量vON=v1/2即可.。
[机械原理]图解-平面机构的运动分析
![[机械原理]图解-平面机构的运动分析](https://img.taocdn.com/s3/m/96d9e0fbd5bbfd0a79567352.png)
at 4 E2B
aC22
an EC
大方5小向)v角速得E速度,度, 方v可其向B 用指的构向判⊥v?EE件与定BB上速采任度用v意的矢C 两角量⊥点平标v?EE之相移CC 间反法的((将相v代对CBb表速该度A1b相除c对于)1速该。度两的点4矢之量间E 平的G移距3到离D对来应求
vE点上)v。 pe
vB
对Δ当67Δb))b应已cc构e当速e边称知图∽同度互为构中Δ一影相Δ件B对B构像C垂上CE应件原直E两且点已理的点字构知:速的母成两同度速顺的点一影度序多速构像时一边度件,致形求上可相第各以似三点用且点在速角速速度e标f度度影字cv时矢像C母B才量原绕能图理行使上求顺v用构出E序速成该相度的v构C同多影件g。边像上形原任与理意其一在点机的 P
1 P12
A
1
P14
VE 2 P24E
P24
2
P23 C
VE E
3
D
4
P34
§3-2 用速度瞬心法作机构速度分析
四、 用瞬心法作机构的速度分析
1. 铰链四杆机构
已知:各杆长及1 ,1。求:2 ,3 。 V E
N(N I) 43
P24
K
6
2
2
P14、P12、P23、P34位于铰链中心
取基点p,按比例尺v (m/s)/mm作速度图
A 1
4
D
b
VB
vC v pc vCB v bc
VCB
p
2
vCB lBC
3
vC l CD
c
VC
方向判定:采用矢量平移法
§3-2 用矢量方程图解法作机构的运动分析
机械原理_运动分析
2 C 3 4 D
υC1 = ω1lAC
υC2 =υC1 +υC2C1
√
? 方向: 方向: CD ⊥AC ∥AB ⊥
c2(c3)
(3)画速度图 画速度图 µυ =υC1 / pc1 ,(m/ s)/ mm
p c1
υC2 = pc2 iµv ω3 =υC3 / lCD (顺时针)
2 C 3 4 D
●依据原理 构件2的运动可以认为是随同构件1 构件2的运动可以认为是随同构件1的牵连运动 和构件2相对于构件1的相对运动的合成。 和构件2相对于构件1的相对运动的合成。
1.速度分析 【解】1.速度分析
B
C点为构件1、2、3的重合点 点为构件1 (1)求已知速度 求已知速度 (2)列方程 列方程
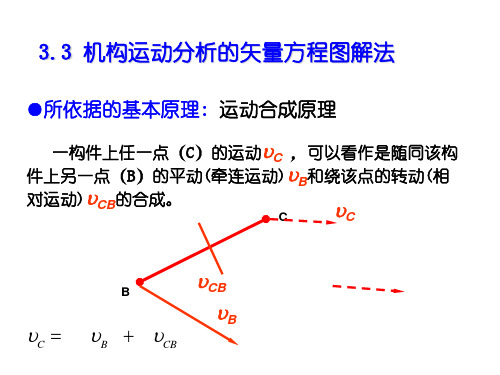
3.3 机构运动分析的矢量方程图解法
所依据的基本原理: ●所依据的基本原理: 运动合成原理
一构件上任一点( 一构件上任一点(C)的运动υC ,可以看作是随同该构 件上另一点( 的平动(牵连运动) 和绕该点的转动( 件上另一点(B)的平动(牵连运动)υB和绕该点的转动(相 对运动) 的合成。 对运动)υCB的合成。
ω1
A
υB ac
【解】 1.速度分析 速度分析 (1)求已知速度 求已知速度
E B 1 2 4 A 3 C
υB = ω1lAB
(2)列方程 列方程 方向 大小 (3)画速度图 画速度图
ω1
υB a c
υC =
?
υB + υCB
⊥ CB
? p c √
水 平 ⊥ AB
p ─ 速度极点。 速度极点。 µυ =υB / pb ,(m/ s) / mm
机械原理-机构的运动分析
3、加速度分析
aC aB aCB
a C a C aB a CB a CB
n t n t
a B 12l AB
F
1
1 A B 2 E C
大小 lCD32
?
→A
lCB22 C→B
? ⊥CB
·
G
3
方向 C→D ⊥CD
取极点p’ ,按比例尺a作加速度图
1
4
D
' aC a p 'c ' aCB a b 'cc´
思考题:
P44 3-1
作业:
P44 3-3、3-6、3-8(b)
§3-3 用矢量方程图解法作机构的运动分析
一、矢量方程图解法的基本原理及作图法
1、基本原理 —— 相对运动原理 B(B1B2) 1
B
A
同一构件上两点间的运动关系
2
两构件重合点间的运动方程
vB v A vBA
aB a A aBA aA a
c´
aC a G e´
aCB
n2 ´ n2
p´
n3
aF
b´
加速度图分析小结: 1)p‘点代表所有构件上绝对加速度为零的影像点。 2)由p‘点指向图上任意点的矢量均代表机构图中对应点 的绝对加速度。 3)除 p′点之外,图中任意两个带“ ′”点间的连线 均代表机构图中对应两点间的相对加速度,其指向与加 速度的角标相反。 4)角加速度可用构件上任意两点之间的相对切向加速度 除于该两点之间的距离来求得,方向的判定采用矢量平 aCB b ' c ' 移法。 5)加速度影像原理:在加速度图上,同一构件上各点的 绝对加速度矢量终点构成的多边形与机构图中对应点构 成的多边形相似且角标字母绕行顺序相同。 6)加速度影像原理只能用于同一构件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ω1
第15页/共27页
VB2B1
2 1 A
VB2B1
aB2
aB1
ak B2B1
ar B 2B 1
VB2
B(B1,B2) : VB1
aB1 anB1 atB1
等速
aB1
anB1
l2 1 AB
ω1
方向由B指向A
第16页/共27页
科氏加速度
ak B 2 B1
当两构件以相同的角速度转动且有相对移动时,其 重合点处必有科氏加速度。
P
C
Aω
B
a
④ 极点p代表机构中所有速度为零的 点—绝对瞬心的影像。
b 特别注意:影像与构件相似而不是与机构位形相似!
cp
第8页/共27页
速度多边形的用途 由两点的速度求构件上任意点的速度
例如,求BC中间点E的速度VE时,bc上 中间点e为E点的影像,连接pe就是VE
C
ωE
A
B
a
ec p b
第9页/共27页
不可解!
第11页/共27页
C
联立方程:
ω
aC=aA + anCA+ atCA = aB + anCB+ atCB A
B
大小: ? √ √ ? √ √ ?
aA
aB
方向: ? √ √ √
√√√
作图得: aC=μap’c’ atCA=μanc”c’
atCB=μac’ nc’
方向:p’ → c’ 方向:nc” → c’ 方向:nc’ → c’
2、同一构件上两点加速度之间的关系
设已知角速度ω,A点加速度,求B点的加速度
A B两点间加速度之间的关系有:
aB =anB+ atB =aA + anBA+ atBA
C
ω
A
B
aA
aB
大小: √ ? √ ω2lAB ?
p’
方向:√ √ √ B→A ⊥BA
选加速度比例尺μa m/s2/mm,
在任意点p’作图使aA=μap’a’
nba’
a’
求得:aB=μap’b’
atBA=μa nba’ b’ 方向: nba’ → b’
b’
nb’
aBA=μab’ a’ 方向: a’ →b’
第10页/共27页
同理: aC=aA + anCA+ atCA 大小: ? √ ω2lCA ? 方向: ? √ C→A ⊥CA
不可解!
同理: aC= aB + anCB+ atCB 大小: ? √ ω2lCB ? 方向: ? √ C→B ⊥CB
P
① 连接p点和任一点的向量,代表该点 在机构中同名点的绝对速度,指向为 p→该点。
C
Aω
B
② 连接任意两点的向量,代表该两点在 机构中同名点之间的相对速度,指向与速 度的下标相反。如bc代表VCB而不是VBC , 常用相对速度来求构件的角速度。
a cp
b
第7页/共27页
速度多边形的性质
③ △abc∽△ABC,称abc为ABC的速度 影像,两者相似且字母顺序一致。前者 沿ω方向转过90°。称pabc为PABC的速 度影像。
n’
a’ nc”
意点的加速度。
例如,求BC中间点E的加速度aE时,b’c’上中间
点e’为E点的影象,联接p’e’就是aE。
第14页/共27页
b’ e’ c’ nc’
三.两构件重合点处的速度和加速度矢量关系
VB2B1
2 1
VB2B1
VB2
B(B1,B2)
VB1
vB2 vB1 vB2B1
A
ak B2B1
2vB2B11
方向: 把 vB2B1沿牵连构件角速度 ω方1 向转过 900
C B
a cp
b
第5页/共27页
ω=VBA/LBA=μvab/μl AB 方向:顺时针
ห้องสมุดไป่ตู้
同理:ω=μvca/μl CA, ω=μvcb/μl CB,
C
Aω
B
得:ab/AB=bc/ BC=ca/CA a
∴ △abc∽△ABC
称pabc为速度多边形(或速度图解) ,p为极点。
b
cp
第6页/共27页
速度多边形的性质
③∵△a’b’c’∽△ABC , 称 a’b’c’ 为 ABC 的 加 速 度影象,称p’a’b’c’为PABC的加速度影象,两 者相似且字母顺序一致。
特别注意:影象与构件相似而不是与机 构位形相似!
C
αE
Aω
B
aA
p’
aB
④极点p’代表机构中所有加速度为零的点。 用途:根据相似性原理由两点的加速度求任
①联接p’点和任一点的向量代表该 点在机构图中同名点的绝对加速 度,指向为p’→该点。
第13页/共27页
n’
a’
nc”
b’
c’
nc’
②联接任意两点的向量代表该两点在机构图中同名点的相 对 加 速 度 , 指 向 与 速 度 的 下 标 相 反 。 如 a’b’ 代 表 aBA 而 不 aAB ,常用相对切向加速度来求构件的角加速度。
p’
n’
a’
nc”
第12页/共27页
b’
c’
nc’
角加速度:α=atBA/ lAB =μa n ’ b’ /μl AB 方向:顺时针
aBA= (atBA)2+ (anBA)2=lAB α2 +ω 4 = μaa’b’
aCA= (atCA)2+ (anCA)2=lCA α2 +ω 4 = μa a’c’
1、 速度关系
A为基点
VB=VA+VBA
设已知大小: ? √ ?
A
方向: √ √ ⊥BA
选速度比例尺μv m/s/mm,
在任意点p作图使VA=μvpa, 按图解法得: VB=μvpb, 相对速度为: VBA=μvab
C B
a p
b
第3页/共27页
同理有: VC=VA+VCA 大小: ? √ ? 方向: ? √ ⊥CA
同理有: VC=VB+VCB 大小: ? √ ? 方向: ? √ ⊥CB
不可解!
不可解!
第4页/共27页
联立方程有:
大小: 方向:
VC=VA+VCA =VB+VCB ?√? √?
A
? √ ⊥CA √ ⊥CB
作图得:VC=μv pc VCA=μv ac VCB=μv bc
方向:p → c 方向: a → c 方向: b → c
C
aCB= (atCB)2+ (anCB)2=lCB α2 +ω 4 = μa b’c’ A ω α
B
得:a’b’/ lAB=b’c’/ lBC= a’ c’/ lCA
∴△a’b’c’∽△ABC
aA
aB
p’
p’a’b’c’ - 加 速 度 多 边 形 ( 或 速 度 图解), p’-极点
加速度多边形的特性:
D= A + B + C 大小:√ ? ? √ 方向:√ √ √ √
B A
C D
第1页/共27页
D= A + B + C 大小:√ √ √ √ 方向:√ √ ? ?
D= A + B + C 大小:√ ? √ √ 方向:√ √ ? √
B
A C
D
B A
C D
第2页/共27页
二、同一构件上两点之间的运动关系