STM32定时器中断实验
实验二定时器和中断应用程序设计与调试3页

实验二定时器和中断应用程序设计与调试3页一、实验目的1. 掌握定时器的工作原理和应用;2. 掌握中断的工作原理和应用;3. 结合定时器和中断设计应用程序。
二、实验器材1. 现成的定时器和中断资源(例如 STM32F103C8T6 单片机板);2. 电脑、USB 电缆、串口调试工具、杜邦线等。
三、实验原理与步骤1. 定时器首先,定时器是一种计时装置,它能够在设定的时间间隔内,发出一个固定的时钟脉冲信号,用于控制外部器件的时间。
定时器通常由计数器和时钟源两部分组成,计数器用于计数,时钟源则提供时钟脉冲。
在 STM32F103C8T6 单片机中,STM32F1 系列具有三个基本定时器,包括 TIM2、TIM3 和 TIM4,以及一个高级定时器 TIM1,这些定时器都是 16 位计数器。
下面以 TIM2 为例,介绍定时器的工作原理和使用方法。
STM32F103C8T6 的时钟系统图如下图所示:其中,HCLK(高速时钟)的频率为 72MHz。
TIM2 的时钟源为:TIM2 的计数器是一个 16 位的寄存器,它的计数范围为 0-65535。
当计数器计数到最大值 65535 后,会自动从 0 开始重新计数。
TIM2 的数据和控制寄存器如下表所示:TIM2 的工作模式有四种,分别为向上计数、向下计数、向上/向下计数和单脉冲模式。
在本次实验中,我们选择向上计数模式,即计数器从 0 开始计数,当计数器计数到设定的值时,触发中断。
2. 中断中断是指由外部事件、硬件故障或软件请求而引起 CPU 暂停正在执行的当前程序,并转去执行一个特殊函数的程序执行机制。
中断是实现系统交互的重要手段,能够提高系统的响应速度和可靠性。
STM32F103C8T6 支持多种类型的中断,包括外部中断、定时器中断、USART 中断和 DMA 中断等。
在 STM32F103C8T6 中,各个中断向量表的地址为 0x0800 0000,STM32F1 系列的中断向量表共有 61 个中断向量,如下图所示:当有中断事件触发时,会自动跳转到相应的中断向量表所存的中断服务函数。
中断实验实验报告

中断实验实验报告本实验是关于中断的学习和实验。
我们需要掌握中断的概念、分类、使用方法、实现过程等知识,并通过实际操作来理解中断的工作原理。
实验环境:硬件:STM32F103C8T6开发板、OLED显示屏、按键开关软件:Keil5、ST-LINK调试工具实验过程:1、准备工作首先,我们需要在Keil中新建一个STM32F103C8T6项目,然后将要使用到的头文件和驱动程序添加到项目中。
2、了解中断中断是指当CPU执行某个程序时,由于硬件或软件的干预而打断原来的程序执行,转而执行指定的中断服务程序(ISR),完成相应的工作后再回到被打断的程序。
中断可以提高系统响应速度,增强系统的可靠性和稳定性。
中断可分为外部中断和内部中断。
外部中断是由硬件引脚上的信号产生的中断请求。
内部中断是由软件产生的中断请求,例如软件中断、定时器中断等。
3、编写程序首先,我们要在程序中使能系统滴答定时器(SysTick)。
SysTick是STM32系统内置的一个定时器,可以在一定的时间周期内产生一次中断请求。
在这里,我们将SysTick的中断周期设置为1秒,以便后续实验中查看效果。
然后,我们编写一个中断服务程序,用来处理按键开关产生的中断请求。
当按键按下时,将在OLED屏幕上显示按键按下的次数,并通过串口向PC端发送按键按下的消息。
需要注意的是,为避免中断服务程序中使用延时函数(例如HAL_Delay),我们在程序中使用了定时器来延时。
最后,我们需要在程序中启用外部中断,以便可以检测到按键开关的中断请求。
在此实验中,我们使用了外部中断1,其对应的引脚为PA1。
4、实验结果当按键按下时,OLED屏幕上的数字会自动加1,并通过串口向PC端发送按键按下的消息。
可以看到,此实验中使用的中断机制可以在不占用CPU资源的情况下,实现对按键事件的响应和处理。
通过这次实验,我们对中断有了更深入的认识,了解了中断的工作原理、分类、使用方法和实现过程,掌握了在STM32中使用中断的具体操作方法。
stm32定时器初始化后自动进入一次中断问题
stm32定时器初始化后⾃动进⼊⼀次中断问题今天在调试定时器时,定时器3出现了⾃动停⽌⼯作的问题,中断设置是每过⼀秒,进⼀次中断,相应标志位+1,然后每次都是在标志位=4时停⽌⼯作,但是有时候⼜能正常⼯作,暂时未解决。
在调试时,发现⼀个有趣的现象,本次项⽬我同时配置了定时器4,初始化后是DISABLE未使能状态,但是开始运⾏,定时器还是会进⼀次中断,相应的标志位+1,后⾯不能继续增加。
motor_run_time这个标志位在程序启动后会进⼀次中断导致+1,⽽我的定时器并未使能。
我的相关代码是初始化部分代码:TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //允许定时器4更新中断TIM_Cmd(TIM4, DISABLE); //关闭定时器4//定时器4中断服务函数void TIM4_IRQHandler(void){if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //溢出中断{motor_run_time++;}TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除中断标志位}增加部分: TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除中断标志位TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //允许定时器4更新中断TIM_Cmd(TIM4, DISABLE); //关闭定时器4//定时器4中断服务函数void TIM4_IRQHandler(void){if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //溢出中断{motor_run_time++;}TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清除中断标志位}。
《STM32单片机仿真开发实例》教学课件 4.3 流水灯之定时器延时(中断方式)
任务要求:
仿真电路如图所示,任务要求同3.3,即实现八个LED的流水灯效果,要求延时必须 通过定时器中断方式实现。
4.3.2 任务程序的编写
首先是工程的图形化配 置,将PC0~PC7全部设为 “GPIO_Output”模式,计 算并设定定时器参数,如 右图所示。
打开定时器中断功能,在定时器配置页面中,选择“NVIC Settings”(NVIC设定) 页,将“TIM3 global interrupt”(定时器3全局中断)打勾,如图所示。
例程:
//TIM3溢出中断回调 void HAL_TIM_PeriodElapsedCallback (TIM_HandleTypeDef *htim) { if(htim==&htim3) { … } }
(现场操作演示...)
技能训练(选做):
修改任务3.1程序,将延时程序由软件延时改为定时器溢出中断方式。
4.3 流水灯之定时器延时(中断方式)
能力目标:
在4.2节的基础上,进一步理解单片机定时器中断的触发原理,掌握单片机定时器延 时中断程序的编制方法。
任务要求:
仿真电路如图所示,任务要求同3.3,即实现八个LED的流水灯效果,要求延时必须 通过定时器中断能,中断发生的时刻为定时器溢出的时刻,即定时器 一个计数周期完成的时刻。
To be continued...
本次任务需要用到的新的API函数有: ① 定时器启动函数(开中断) HAL_TIM_Base_Start_IT
例程:
//运行定时器TIM3并开启对应中断 if( HAL_TIM_Base_Start_IT(&htim3) != HAL_OK ) { Error_Handler(); }
stm32外部中断实验报告-STM32实例外部中断实验
stm32外部中断实验报告_STM32实例外部中断实验上⼀篇⽂章我们介绍了 STM32F10x 的中断,这次我们就来学习下外部中断。
本⽂中要实现的功能与按键实验⼀样,即通过按键控制LED,只不过这⾥采⽤外部中断⽅式进⾏控制。
学习时可以参考《STM32F10x 中⽂参考⼿册》-9 中断和事件章节。
外部中断介绍EXTI 简介STM32F10x 外部中断/事件控制器(EXTI)包含多达 20 个⽤于产⽣事件/中断请求的边沿检测器。
EXTI 的每根输⼊线都可单独进⾏配置,以选择类型(中断或事件)和相应的触发事件(上升沿触发、下降沿触发或边沿触发),还可独⽴地被屏蔽。
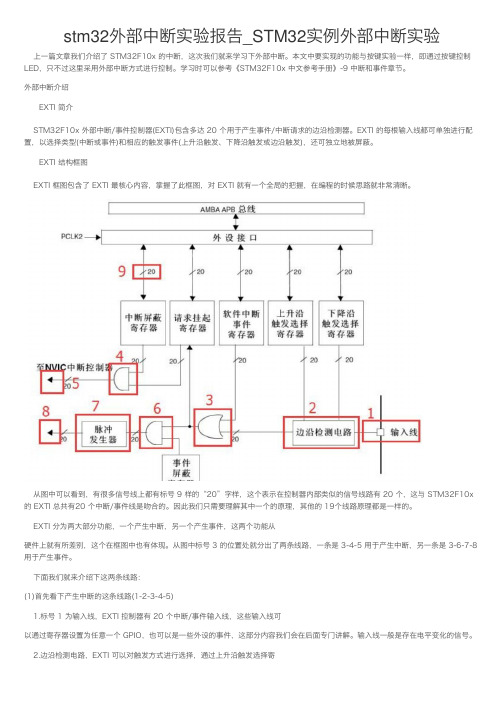
EXTI 结构框图EXTI 框图包含了 EXTI 最核⼼内容,掌握了此框图,对 EXTI 就有⼀个全局的把握,在编程的时候思路就⾮常清晰。
从图中可以看到,有很多信号线上都有标号 9 样的“20”字样,这个表⽰在控制器内部类似的信号线路有 20 个,这与 STM32F10x 的 EXTI 总共有20 个中断/事件线是吻合的。
因此我们只需要理解其中⼀个的原理,其他的 19个线路原理都是⼀样的。
EXTI 分为两⼤部分功能,⼀个产⽣中断,另⼀个产⽣事件,这两个功能从硬件上就有所差别,这个在框图中也有体现。
从图中标号 3 的位置处就分出了两条线路,⼀条是 3-4-5 ⽤于产⽣中断,另⼀条是 3-6-7-8⽤于产⽣事件。
下⾯我们就来介绍下这两条线路:(1)⾸先看下产⽣中断的这条线路(1-2-3-4-5)1.标号 1 为输⼊线,EXTI 控制器有 20 个中断/事件输⼊线,这些输⼊线可以通过寄存器设置为任意⼀个 GPIO,也可以是⼀些外设的事件,这部分内容我们会在后⾯专门讲解。
输⼊线⼀般是存在电平变化的信号。
2.边沿检测电路,EXTI 可以对触发⽅式进⾏选择,通过上升沿触发选择寄存器和下降沿触发选择寄存器对应位的设置来控制信号触发。
边沿检测电路以输⼊线作为信号输⼊端,如果检测到有边沿跳变就输出有效信号 1 给红⾊框 3 电路,否则输出⽆效信号 0。
STM32函数库之定时器中断
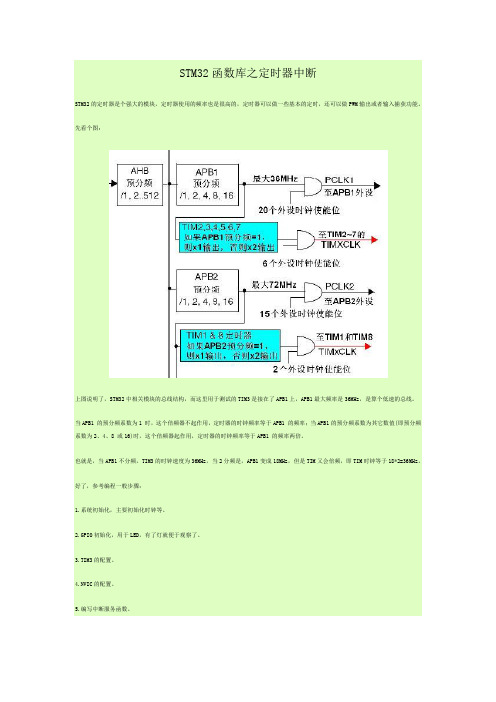
STM32 的定时器是个强大的模块,定时器使用的频率也是很高的,定时器可以做一些基本的定时,还可以做 PWM 输出或者输入捕获功能。 先看个图:
上图说明了,STM32 中相关模块的总线结构,而这里用于测试的 TIM3 是接在了 APB1 上,APB1 最大频率是 36MHz,是算个低速的总线。 当 APB1 的预分频系数为 1 时,这个倍频器不起作用,定时器的时钟频率等于 APB1 的频率;当 APB1 的预分频系数为其它数值(即预分频 系数为 2、4、8 或 16)时,这个倍频器起作用,定时器的时钟频率等于 APB1 的频率两倍。 也就是,当 APB1 不分频,TIM3 的时钟速度为 36MHz,当 2 分频是,APB1 变成 18MHz,但是 TIM 又会倍频,即 TIM 时钟等于 18*2=36MHz。 好了,参考编程一般步骤: 1.系统初始化,主要初始化时钟等。 2.GPIO 初始化,用于 LED,有了灯就便于观察了。 3.TIM3 的配置。 4.NVIC 的配置。 5.编写中断服务函数。
实际,仿真波形如下:
首先,系统初始化直接使用 SystemInit()函数即可,但是分析汇编启动代码,发现已经做了初始化了!所以就不去瞎凑热闹了。可以省 去。
Reset_Handler PROC EXPORT Reset_Handler [WEAK] IMPORT __main IMPORT SystemInit LDR R0, =SystemInit BLX R0 LDR R0, =__main BX R0 ENDP
第二步就是编写 GPIO 了,参考前面的点灯文章就明白了。代码如下:
/**led**/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_WriteBit(GPIOA,GPIO_Pin_8,Bit_SET);
STM32F单纯的TIM2定时器溢出中断试验程序
STM32F定时器的功能非常丰富,像我这样单纯的TI M2定时器溢出中断人恐怕不多了,所以找例子资料也找不到费了九牛二虎之力终于杜撰出来了,发帖庆祝!我这里用了S T新版的STM32F FWL IB2.0库,用到的函数都添加了中文注释。
IA R编译的项目传不上来,有要看的朋友留下E MAIL我发邮件给你。
/*Inclu des ------------------------------------------------------------------*/#i nclud e "st m32f10x_li b.h"Error Statu s HSE Start UpSta tus;voidRCC_C onfig urati on(vo id);voidGPIO_Confi gurat ion(v oid);void NVIC_Conf igura tion(void);voi d TIM_Conf igura tion(void);voi d del ay(vo id);/*********************************************************************** ********* F uncti on Na me : main* De scrip tion :Mainprogr am*Input: Non e* O utput: None* Re turn :None************************************************************************ *******/intmain(void){#ifdef DEBU Gd ebug();/*[初始化外围设备指针]*/#e ndifGPI O_Con figur ation();//初始化io口N VIC_C onfig urati on();//初始化中断嵌套RCC_Conf igura tion(); //初始化时钟与复位 TIM_Confi gurat ion();//初始化定时器whi le(1){ dela y();}}/********************************************************************************Funct ion N ame : RCC_Conf igura tion* Des cript ion : C onfig uresthe d iffer ent s ystem cloc ks.* Inpu t : No ne*Outpu t : Non e* R eturn: None************************************************************************ *******/voi d RCC_Conf igura tion(void){/* RC C sys tem r eset(for d ebugpurpo se)[复位RCC外围设备寄存器到默认复位值] */ R CC_De Init(); /* E nable HSE[HSE振荡器开启]*/RCC_H SECon fig(R CC_HS E_ON);/* Wa it ti ll HS E isready [等待H SE启动]*/HSESt artUp Statu s = R CC_Wa itFor HSESt artUp();if(HSESt artUp Statu s ==SUCCE SS) { /*Enabl e Pre fetch Buff er [预取缓冲区允许]*/F LASH_Prefe tchBu fferC md(FL ASH_P refet chBuf fer_E nable); /* Flas h 2 w ait s tate[代码2个延时周期]*/ FLA SH_Se tLate ncy(F LASH_Laten cy_2); /*HCLK= SYS CLK [AHB时钟等于SYS CLK]*/ RCC_HCLKC onfig(RCC_SYSCL K_Div1); /*PCLK2 = HC LK [A PB2时钟等于HCL K]*/R CC_PC LK2Co nfig(RCC_H CLK_D iv1); /*PCLK1 = HC LK/2[低速AP B1时钟等于HCLK/2]*/RCC_P CLK1C onfig(RCC_HCLK_Div2); /*PLLCL K = 8MHz * 9 =72 MH z [配置PLL时钟源和乘法因子][PL L时钟输入等于HSE时钟][P LL乘法因子取值9]*/ RCC_PLLC onfig(RCC_PLLSo urce_HSE_D iv1,RCC_P LLMul_9);/* En ablePLL [允许PLL]*/ R CC_PL LCmd(ENABL E);/* Wai t til l PLL is r eady[等待PL L时钟就绪]*/ wh ile(R CC_Ge tFlag Statu s(RCC_FLAG_PLLR DY) == RES ET) {} /* S elect PLLas sy stemclock sour ce [选择PLL作为系统时钟]*/ RC C_SYS CLKCo nfig(RCC_S YSCLK Sourc e_PLL CLK); /* W ait t ill P LL is used as s ystem cloc k sou rce[等待PLL被作为系统时钟] */while(RCC_GetSY SCLKS ource() != 0x08) { } } /* TIM2 cloc k ena ble [TIM2定时器允许]*/RCC_A PB1Pe riphC lockC md(RC C_APB1Peri ph_TI M2, E NABLE); }/*********************************************************************** ********* Func tionName : GP IO_Co nfigu ratio n* D escri ption: LED输出配置* Inpu t : No ne*Outpu t : Non e* R eturn: None************************************************************************ *******/voi d GPI O_Con figur ation(void){ GPIO_Init TypeD ef GP IO_In itStr uctur e; /* E nable GPIO C clo ck [使能GPIO C时钟]*/R CC_AP B2Per iphCl ockCm d(RCC_APB2Perip h_GPI OC, E NABLE); /* C onfig ure P C.04, PC.05, PC.06 a nd PC.07 a s out put p ush-p ull[把PC4、P C5、PC6、PC7配置成输出模式] */G PIO_I nitSt ructu re.GP IO_Pi n = GPIO_Pin_6 | GP IO_Pi n_7 | GPIO_Pin_4| G PIO_P in_5;GP IO_In itStr uctur e.GPI O_Mod e = G PIO_M ode_O ut_PP;G PIO_I nitSt ructu re.GP IO_Sp eed = GPIO_Spee d_50M Hz;//GPIO最高速度50MHz GPIO_Init(GPIO C, &G PIO_I nitSt ructu re);}/*********************************************************************** ********* Func tionName : NV IC_Co nfigu ratio n* D escri ption: Conf igure s the nest ed ve ctore d int errup t con troll er.[配置中断向量表的起始位置]*Input: Non e* O utput: None* Re turn :None************************************************************************ *******/void NVIC_Conf igura tion(void){NVIC_InitT ypeDe f NVI C_Ini tStru cture;#i fdef VECT_TAB_RAM /* Setthe V ector Tabl e bas e loc ation at 0x20000000[设置中断向量表的起始位置0x20000000]*/NVIC_SetVe ctorT able(NVIC_VectT ab_RA M, 0x0); #else /*VECT_TAB_F LASH */ /* S et th e Vec tor T ablebaselocat ion a t 0x08000000[设置中断向量表的起始位置0x0x08000000] */NVIC_SetVe ctorT able(NVIC_VectT ab_FL ASH,0x0);#endif/* Co nfigu re th e NVI C Pre empti on Pr iorit y Bit s[配置优先级组]*/ NVI C_Pri ority Group Confi g(NVI C_Pri ority Group_0);/* En ablethe T IM2 g loaba l Int errup t [允许TIM2全局中断]*/N VIC_I nitSt ructu re.NV IC_IR QChan nel = TIM2_IRQC hanne l;NVIC_InitS truct ure.N VIC_I RQCha nnelP reemp tionP riori ty =0;NVIC_InitS truct ure.N VIC_I RQCha nnelS ubPri ority = 0;NVIC_InitS truct ure.N VIC_I RQCha nnelC md =ENABL E;NVIC_Init(&NVIC_Init Struc ture);}/*********************************************************************** ********* Fu nctio n Nam e :TIM2_Confi gurat ion* Desc ripti on :* Inpu t : No ne*Outpu t : Non e* R eturn: None************************************************************************ *******/voi d TIM_Conf igura tion(void){ TIM_TimeB aseIn itTyp eDef TIM_TimeB aseSt ructu re;// TI M_OCI nitTy peDef TIM_OCIn itStr uctur e ; TIM_DeIni t( TI M2);//复位TI M2定时器/* TIM2 con figur ation */ TIM_TimeB aseSt ructu re.TI M_Per iod = 0xff ff; //最大计数值0xff ff TIM_TimeB aseSt ructu re.TI M_Pre scale r = 0x36;//分频0x36 TIM_Time BaseS truct ure.T IM_Cl ockDi visio n = 0x0; // 时钟分割 TIM_TimeB aseSt ructu re.TI M_Cou nterM ode = TIM_Count erMod e_Up; //计数方向向上计数TIM_T imeBa seIni t(TIM2, &T IM_Ti meBas eStru cture);/* Cl ear T IM2 u pdate pend ing f lag[清除TIM2溢出中断标志] */TI M_Cle arFla g(TIM2, TI M_FLA G_Upd ate);/* Enab le TI M2 Up dateinter rupt[TIM2溢出中断允许]*/TIM_ITCo nfig(TIM2, TIM_IT_Up date, ENAB LE);/* TI M2 en ablecount er [允许tim2计数]*/TI M_Cmd(TIM2, ENA BLE);}/*********************************************************************** ********* Fu nctio n Nam e :delay* De scrip tion :延时*Input: Non e* O utput: None* Re turn :None************************************************************************ *******/void dela y(voi d){u32 i,j;fo r (i=0; i<0x0ff fff;i++){j ++;}}#if def DEBUG/*********************************************************************** ********* F uncti on Na me : asse rt_fa iled[断言失败]* De scrip tion :Repor ts th e nam e ofthe s ource file andthe s ource line numb er* whe re th e ass ert e rrorhas o ccurr ed.* Inpu t : -file: poin ter t o the sour ce fi le na me* - l ine:asser t err or li ne so urcenumbe r* O utput: None* Re turn :None************************************************************************ *******/void asse rt_fa iled(u8* f ile,u32 l ine){/* Use r can addhis o wn im pleme ntati on to repo rt th e fil e nam e and line numb er,e x: pr intf("Wron g par amete rs va lue:file%s on line %d\r\n",file, line) *//*Infin ite l oop */w hile(1) { }}#endi f/******************* (C) COP YRIGH T 2007 STM icroe lectr onics *****ENDOF FI LE****/。
STM32学习笔记之三_定时器中断
RCC_APB2Periph_GPIOF | RCC_APB2Periph_GPIOG | RCC_APB2Periph_AFIO, ENABLE); } 使用 HSE 时钟,程序设置时钟参数流程: 1、将 RCC 寄存器重新设置为默认值 RCC_DeInit 2、打开外部高速时钟晶振 HSE RCC_HSEConfig(RCC_HSE_ON); 3、 等待外部高速时钟晶振工作 HSEStartUpStatus = RCC_WaitForHSEStartUp(); 4、设置 AHB 时钟 RCC_HCLKConfig; 5、设置高速 AHB 时钟 RCC_PCLK2Config; 6、设置低速速 AHB 时钟 RCC_PCLK1Config 7、设置 PLL RCC_PLLConfig 8、打开 PLL RCC_PLLCmd(ENABLE); 9、 等待 PLL 工作 while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) 10、设置系统时钟 RCC_SYSCLKConfig 11、判断是否 PLL 是系统时钟 while(RCC_GetSYSCLKSource() != 0x08) 12、 打开要使用的外设时钟 RCC_APB2PeriphClockCmd()/RCC_APB1PeriphClockCmd () 下面是 TM32 软件固件库的程序中对 RCC 的配置函数(使用外部 8MHz 晶振) /************************************************************************** * Function Name : RCC_Configuration * Description : RCC 配置(使用外部 8MHz 晶振) * Input : 无 * Output : 无 * Return : 无 **************************************************************************/
STM32-定时器中断实现
STM32-定时器中断实现⼀、⼯具 1、硬件:STM32L053R8单⽚机(HAL库) 2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0 3、辅助⼯具:STM32CubeMX⼆、单⽚机系统时钟配置 1、系统时钟配置(没有显⽰的默认),这⾥选择的是内部的⾼速时钟(HSI)作为时钟源,系统时钟频率配置到24MHz。
三、定时器配置 1、选⽤的定时器为TIM22,时钟源选择内部时钟,即24MHz,分频值为24(设置值为24-1),⾃动重装载值为1000(设置值为1000-1),得到该定时器的周期为(1000x24)/24000000 = 1ms。
2、使能定时器中断四、⽣成⼯程并进⾏完善 1、⼯程⽣成设置 2、完善代码 因为⽤到了定时器中断,在配置完定时器后,在定时器启动之前清除⼀下更新事件中断以防⽌中断提前触发(开启定时器中断后,每隔⼀个周期硬件就把定时器更新事件置1)。
/*** @brief TIM22 Initialization Function* @param None* @retval None*/static void MX_TIM22_Init(void){/* USER CODE BEGIN TIM22_Init 0 *//* USER CODE END TIM22_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};/* USER CODE BEGIN TIM22_Init 1 *//* 定时器设定的是1ms延时产⽣⼀次中断 *//* USER CODE END TIM22_Init 1 */htim22.Instance = TIM22;htim22.Init.Prescaler = 23;htim22.Init.CounterMode = TIM_COUNTERMODE_UP;htim22.Init.Period = 999;htim22.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim22.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_Base_Init(&htim22) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim22, &sClockSourceConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim22, &sMasterConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM22_Init 2 */__HAL_TIM_CLEAR_IT(&htim22, TIM_IT_UPDATE);/* USER CODE END TIM22_Init 2 */} 定时器中断响应后会调⽤⼀个回调函数,该函数的内容可以由⽤户⾃⼰添加(该函数为固定写法不能随意更改)。
stm32单片机设计定时器中断实现1s的led灯闪烁知识应用
stm32单片机设计定时器中断实现1s的led灯闪烁知识应用要实现1s的LED灯闪烁,可以使用STM32单片机的定时器中断来控制LED的开关。
以下是实现的步骤:1. 配置定时器:选择一个定时器(如TIM2)并设置适当的预分频和计数值,以实现1s的定时周期。
2. 配置中断:使能定时器中断,并将中断优先级设置为适当的值(较高优先级)。
3. 初始化LED引脚:将LED引脚设置为输出,并初始化为高电平(LED关闭)。
4. 编写中断处理程序:在中断处理程序(如TIM2_IRQHandler)中,切换LED引脚的状态。
例如,如果LED引脚当前为高电平,则将其设置为低电平,反之亦然。
5. 启动定时器:启动定时器以开始定时。
整个步骤如下所示的代码示例:```c#include "stm32fxx.h"void TIM2_IRQHandler(void){if(TIM2->SR & TIM_SR_UIF){TIM2->SR &= ~TIM_SR_UIF; // 清除中断标志位// 切换LED引脚状态if(GPIOC->ODR & GPIO_ODR_ODR0)GPIOC->ODR &= ~GPIO_ODR_ODR0; // 关闭LEDelseGPIOC->ODR |= GPIO_ODR_ODR0; // 打开LED}}int main(){// 初始化LED引脚RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN; // 使能GPIOC时钟GPIOC->MODER |= GPIO_MODER_MODER0_0; // 将PC0设置为输出模式GPIOC->OSPEEDR |= GPIO_OSPEEDR_OSPEED0; // 设置PC0输出速度// 配置定时器RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; // 使能TIM2时钟TIM2->PSC = 8399; // 将预分频设置为8400-1,得到10kHz 的计数频率TIM2->ARR = 9999; // 将计数值设置为10000-1,得到1s的定时周期// 配置中断TIM2->DIER |= TIM_DIER_UIE; // 使能更新中断NVIC_EnableIRQ(TIM2_IRQn); // 使能TIM2中断NVIC_SetPriority(TIM2_IRQn, 0); // 设置TIM2中断优先级为最高// 启动定时器TIM2->CR1 |= TIM_CR1_CEN; // 启动TIM2定时器while(1){// 程序主循环}return 0;}```以上代码使用了TIM2定时器和PC0引脚作为LED灯的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8
《例说STM32》
DMA/中断使能寄存器(TIMx_DIER)
该寄存器是一个16位的寄存器,这里我们仅关心它的第6位和第0位,第6位 TIE为触发中断使能位,通过将该位置1使能TIMx的中断触发,注意只要是 TIMx需要使用中断,该位必须为1。而第0位,则为允许更新中断位,通过置1 ,来允许由于更新事件所产生的中断。
12/6/2019
广州市星翼电子科技有限公司
18
软件设计:timer.c
《例说STM32》
12/6/2019
广州市星翼电子科技有限公司
19
main函数
《例说STM32》
12/6/2019
广州市星翼电子科技有限公司
20
12/6/2019
广州市星翼电子科技有限公司
2
《例说STM32》
9.1 通用定时器简介
STM32的定时器功能十分强大,有TIME1和TIME8等高级 定时器,也有TIME2~TIME5等通用定时器,还有TIME6和 TIME7等基本定时器。
STM32的通用定时器是一个通过可编程预分频器(PSC) 驱动的16位自动装载计数器(CNT)构成。STM32的通用 定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或 者产生输出波形(输出比较和PWM)等。 使用定时器预分频 器和RCC时钟控制器预分频器,脉冲长度和波形周期可以 在几个微秒到几个毫秒间调整。STM32的每个通用定时器 都是完全独立的,没有互相共享的任何资源。
12/6/2019
广州市星翼电子科技有限公司
3
《例说STM32》
STM3的通用TIMx (x=2,3,4,5)定时器功能包括:
1)16位向上、向下、向上/向下自动装载计数器( TIMx_CNT)。
2)16位可编程(可以实时修改)预分频器(TIMx_PSC),计数 器时钟频率的分频系数为1~65535之间的任意数值。
12/6/2019
广州市星翼电子科技有限公司
9
《例说STM32》
预分频寄存器(TIMx_PSC)
该寄存器用设置对时钟进行分频,然后提供给计数器,作为计数器的 时钟。
12/6/2019
广州市星翼电子科技有限公司
10
《例说STM32》
这里,我们的时钟来源有4个: 1)内部时钟(CK_INT) 2)外部时钟模式1:外部输入脚(TIx) 3)外部时钟模式2:外部触发输入(ETR) 4)内部触发输入(ITRx):使用A定时器作为B定时器的预分频器(A为 B提供时钟)。 这些时钟,具体选择哪个可以通过TIMx_SMCR寄存器的相关位来设置。 这里的CK_INT时钟是从APB1倍频的来的,除非APB1的时钟分频数设置 为1,否则通用定时器TIMx的时钟是APB1时钟的2倍,当APB1的时钟不分 频的时候,通用定时器TIMx的时钟就等于APB1的时钟。这里还要注意的 就是高级定时器的时钟不是来自APB1,而是来自APB2的。 这里顺带介绍一下TIMx_CNT寄存器,该寄存器是定时器的计数器,该 寄存器存储了当前定时器的计数值。
12/6/2019
广州市星翼电子科技有限公司
15
《例说STM32》
3)设置TIM3_DIER允许更新中断。
因为我们要使用TIM3的更新中断,所以设置DIER的UIE位,并使能 触发中断。
4)允许TIM3工作。
光配置好定时器还不行,没有开启定时器,照样不能用。我们在配置 完后要开启定时器,通过TIM3_CR1的CEN位星翼电子科技有限公司
11
《例说STM32》
自动重装载寄存器(TIMx_ARR)
该寄存器在物理上实际对应着2个寄存器。一个是程序员可以直接操作的,另 外一个是程序员看不到的,这个看不到的寄存器在《STM32参考手册》里面 被叫做影子寄存器。事实上真正起作用的是影子寄存器。根据TIMx_CR1寄存 器中APRE位的设置:APRE=0时,预装载寄存器的内容可以随时传送到影子 寄存器,此时2者是连通的;而APRE=1时,在每一次更新事件(UEV)时, 才把预装在寄存器的内容传送到影子寄存器。
12/6/2019
广州市星翼电子科技有限公司
5
《例说STM32》
9.2 通用定时器寄存器描述
控制寄存器1(TIMx_CR1)
12/6/2019
广州市星翼电子科技有限公司
6
《例说STM32》
12/6/2019
广州市星翼电子科技有限公司
7
《例说STM32》
12/6/2019
广州市星翼电子科技有限公司
12/6/2019
广州市星翼电子科技有限公司
17
《例说STM32》
9.4 实验讲解
硬件设计:
本章将通过TIM3的中断来控制DS1的亮灭,DS1是直接连 接到PD2上的,所以电路上不需要任何改动。
实验现象:
DS0不停闪烁(每400ms闪烁一次),而DS1也是不停的 闪烁,但是闪烁时间较DS0慢(1s一次)。
12/6/2019
广州市星翼电子科技有限公司
16
《例说STM32》
5)TIM3中断分组设置。
在定时器配置完了之后,因为要产生中断,必不可少的要 设置NVIC相关寄存器,以使能TIM3中断。
6)编写中断服务函数。
在最后,还是要编写定时器中断服务函数,通过该函数来处理 定时器产生的相关中断。在中断产生后,通过状态寄存器的值 来判断此次产生的中断属于什么类型。然后执行相关的操作, 我们这里使用的是更新(溢出)中断,所以在状态寄存器SR的 最低位。在处理完中断之后应该向TIM3_SR的最低位写0,来 清除该中断标志。
这里我们通过APB1ENR的第1位来设置TIM3的时钟,因为 Stm32_Clock_Init函数里面把APB1的分频设置为2了,所以我们的 TIM3时钟就是APB1时钟的2倍,等于系统时钟(72M)。
2)设置TIM3_ARR和TIM3_PSC的值。
通过这两个寄存器,我们来设置自动重装的值,以及分频系数。这两 个参数加上时钟频率就决定了定时器的溢出时间。
3)4个独立通道(TIMx_CH1~4),这些通道可以用来作 为: A.输入捕获 B.输出比较 C.PWM生成(边缘或中间对齐模式) D.单脉冲模式输出
12/6/2019
广州市星翼电子科技有限公司
4
《例说STM32》
4)可使用外部信号(TIMx_ETR)控制定时器和定时器互 连(可以用1个定时器控制另外一个定时器)的同步电 路。
12/6/2019
广州市星翼电子科技有限公司
12
《例说STM32》
这里,我们的时钟来源有4个: 1)内部时钟(CK_INT) 2)外部时钟模式1:外部输入脚(TIx) 3)外部时钟模式2:外部触发输入(ETR) 4)内部触发输入(ITRx):使用A定时器作为B定时器的预分频器( A为B提供时钟)。 这些时钟,具体选择哪个可以通过TIMx_SMCR寄存器的相关位来设 置。这里的CK_INT时钟是从APB1倍频的来的,除非APB1的时钟分频 数设置为1,否则通用定时器TIMx的时钟是APB1时钟的2倍,当APB1 的时钟不分频的时候,通用定时器TIMx的时钟就等于APB1的时钟。 这里还要注意的就是高级定时器的时钟不是来自APB1,而是来自 APB2的。 这里顺带介绍一下TIMx_CNT寄存器,该寄存器是定时器的计数器, 该寄存器存储了当前定时器的计数值。
《例说STM32》
例说STM32
ALIENTEK开发板购买店铺
店铺:
12/6/2019
广州市星翼电子科技有限公司
1
《例说STM32》
第9讲 定时器中断实验
9.1 通用定时器简介 9.2 寄存器描述 9.3 通用定时器配置步骤 9.4 实验讲解
12/6/2019
广州市星翼电子科技有限公司
13
《例说STM32》
状态寄存器(TIMx_SR)
该寄存器用来标记当前与定时器相关的各种事件/中断是否发生。 具体每位的含义,请参考中文参考手册。
12/6/2019
广州市星翼电子科技有限公司
14
《例说STM32》
9.3 通用定时器配置步骤
1)TIM3时钟使能。
5)如下事件发生时产生中断/DMA: A.更新:计数器向上溢出/向下溢出,计数器初始化( 通过软件或者内部/外部触发) B.触发事件(计数器启动、停止、初始化或者由内部/ 外部触发计数) C.输入捕获 D.输出比较 E.支持针对定位的增量(正交)编码器和霍尔传感器电 路
F.触发输入作为外部时钟或者按周期的电流管理