电磁抱闸
电磁抱闸制动原理

电磁抱闸制动原理
电磁抱闸制动原理是通过电磁铁的吸合和松开来实现制动和释放的操作。
其原理主要包括以下几个方面:
1. 电磁铁:电磁抱闸中的关键部件是电磁铁。
它由线圈、铁芯和励磁电源组成。
当电磁铁通电时,线圈产生磁场,使铁芯被磁力吸引,并与制动器的摩擦片紧密贴合,从而实现制动操作。
2. 松合机构:除了电磁铁,电磁抱闸还配备了一个松合机构。
当电磁铁断电时,松合机构会将电磁铁和摩擦片分离,释放制动器,使其恢复到原来的自由状态。
3. 摩擦片:电磁抱闸中的制动器通常包括静摩擦片和动摩擦片。
当电磁铁通电时,它们会被压紧,与制动器的固定部件摩擦产生阻力,使机械设备停止运动。
4. 励磁电源:为了使电磁铁正常工作,需提供励磁电源。
通常使用直流电源供应电磁铁,通过控制开关实现制动器的开合。
总之,电磁抱闸制动原理是通过电磁铁的通断控制制动器的摩擦片与制动器固定部件之间的接触,从而实现制动和释放的过程。
电磁抱闸制动器广泛应用于机械设备的制动和定位控制中。
电磁抱闸制动器原理

电磁抱闸制动器原理电磁抱闸制动器是一种较为常见的制动设备,它在机械运动中起着非常重要的作用。
那么,它的原理是什么呢?它又是如何工作的呢?下面,我们将针对这些问题进行详细的介绍。
一、电磁抱闸制动器的原理电磁抱闸制动器是由称为制动器芯的电磁铁和一些机械构件组成的一种制动装置。
当通电时,制动器芯产生磁力吸合,使制动器的制动面与被制动的运动轮等机械运动部件相接触,达到制动的目的。
当不通电时,制动器芯停止产生磁力,与被制动的运动轮等机械运动部件分离,使之恢复运转。
电磁抱闸制动器的运行原理是利用电磁铁产生的强大磁力来吸合和分离制动器芯。
在正常的运行状态下,制动器芯和被制动的运动轮之间存在一定的空隙,当电磁铁通电时,芯铁上的线圈会产生磁场,从而产生磁力使制动器芯与被制动的运动轮之间产生摩擦,从而使之停止旋转。
二、电磁抱闸制动器的工作过程电磁抱闸制动器的工作过程可以分为三个阶段:1. 初建立磁路当电磁铁通电时,线圈中的电流会产生磁场,从而使得制动器芯与被制动的运动轮之间产生磁吸合现象。
此时,磁力的大小与电流的大小具有直接的关系。
2. 稳定工作状态当制动器芯和运动轮之间完成磁吸合后,电磁铁能够维持一段时间的磁路。
在这段时间内,磁路上的磁场能够保持不变,从而使制动器能够维持稳定的制动状态。
3. 制动器分离在不需要制动的情况下,可以通过断开电磁铁的电源来使制动器芯与被制动的运动轮之间分离。
此时,制动器会恢复到正常的运行状态。
三、电磁抱闸制动器的分类电磁抱闸制动器的分类可以根据其工作方式、使用场景和制动力大小来进行划分。
1. 工作方式分类按照工作方式的不同,电磁抱闸制动器可以分为直流电磁抱闸制动器和交流电磁抱闸制动器。
直流电磁抱闸制动器由于具有开关速度快、响应时间短的优点,因此一般用于短时间内必须迅速制动的场合;交流电磁抱闸制动器则一般应用于制动过程较为缓慢的场合。
2. 使用场景分类根据不同的使用场景,电磁抱闸制动器可以分为机床电磁抱闸制动器、卷材电磁抱闸制动器、提升机电磁抱闸制动器等等。
SEW电机抱闸功能介绍

SGMDY BPD&MS
凝心 聚力 创 未来
10
主要电机抱闸接线
常见电机类型
SEW变频器驱动电机(MOVOMOT): 1. 电机内无制动模块,只存在抱闸接线端
子。 2. 变频器集成整流模块,可输出直流电,
直接接入抱闸线圈。 3. 电机故障率小,若故障,更换变频模块
即可。
SGMDY BPD&MS
凝心 聚力 创 未来
切断交流电的同时,将电路内存 在的直流回路切断,从而达到快 速制动的效果。
普通制动:切断交流电后,内部 存在导通回路: TS—5—B—1— TS。
快速制动:将抱闸接线(蓝)有5 改为接到4上,在切断交流电时, 也切断4/5间连线,不能形成的回 路 5—B—1—TS—4.
快速模式是为了切断回路,使用 4/5端接是不能够实现的。
安装在接线盒的整流元件
安装在开关柜的整流元件
SGMDY BPD&MS
凝心 聚力 创 未来
3
制动器结构、工作原理
1 2 3
4 5 SGMDY BPD&MS
电机抱闸结构
6 8 9
10
11
Schnitt_00871.cdr
工作原理:电磁抱闸线圈得电(DC),衔铁 吸合,克服弹簧的拉力使制动器的闸瓦与 闸轮分开。断开开关或接触器,电磁抱闸 线圈失电,衔铁在弹簧拉力作用下与铁芯 分开,并使制动器的闸瓦紧紧抱住闸轮, 电动机被制动而停转。
SGMDY BPD&MS
凝心 聚力 创 未来
5
可调的制动扭矩
重要特性和技术参数
高弹力
低弹力
SGMDY BPD&MS
凝心 聚力 创 未来
6
电气抱闸的控制方法
一、抱闸结构和控制原理制动的方法一般有两类:机械制动和电气制动。
A、机械制动利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
常用的方法:电磁抱闸制动。
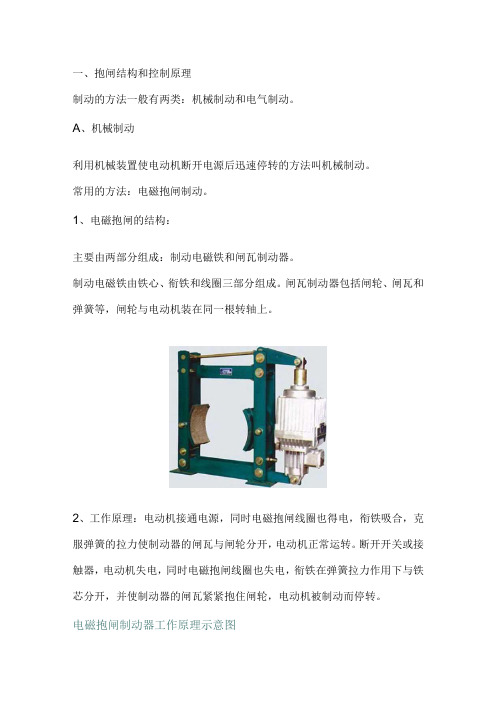
1、电磁抱闸的结构:主要由两部分组成:制动电磁铁和闸瓦制动器。
制动电磁铁由铁心、衔铁和线圈三部分组成。
闸瓦制动器包括闸轮、闸瓦和弹簧等,闸轮与电动机装在同一根转轴上。
2、工作原理:电动机接通电源,同时电磁抱闸线圈也得电,衔铁吸合,克服弹簧的拉力使制动器的闸瓦与闸轮分开,电动机正常运转。
断开开关或接触器,电动机失电,同时电磁抱闸线圈也失电,衔铁在弹簧拉力作用下与铁芯分开,并使制动器的闸瓦紧紧抱住闸轮,电动机被制动而停转。
电磁抱闸制动器工作原理示意图3、电磁抱闸制动的特点机械制动主要采用电磁抱闸、电磁离合器制动,两者都是利用电磁线圈通电后产生磁场,使静铁芯产生足够大的吸力吸合衔铁或动铁芯(电磁离合器的动铁芯被吸合,动、静摩擦片分开),克服弹簧的拉力而满足工作现场的要求。
电磁抱闸是靠闸瓦的摩擦片制动闸轮.电磁离合器是利用动、静摩擦片之间足够大的摩擦力使电动机断电后立即制动。
优点:电磁抱闸制动,制动力强,广泛应用在起重设备上。
它安全可靠,不会因突然断电而发生事故。
缺点:电磁抱闸体积较大,制动器磨损严重,快速制动时会产生振动。
4、电动机抱闸间隙的调整方法停机。
(机械和电气关闭确认、泄压并动力上锁,并悬挂“正在检修”、“严禁启动”警示牌。
)卸下扇叶罩;取下风扇卡簧,卸下扇叶片;检查制动器衬的剩余厚度(制动衬的最小厚度);检查防护盘:如果防护盘边缘已经碰到定位销标记时,必须更换制动器盘;调整制动器的空气间隙:将三个(四个)螺栓拧紧到空气间隙为零,再将螺栓反向拧松角度为120。
,用塞尺检查制动器的间隙(至少检查三个点),应该均匀且符合规定值;不对请重新调整;(注:抱闸的型号不同,其反向拧松的角度、制动器的间隙也不一样)。
手动运行,制动器动作声音清脆、停止位置准确、有效。
电动机制动控制
三相异步电动机电磁抱闸通电制动
如图3所示:合上电源开关QS,按动启动按钮SB1,接触器线圈KM1通电, KM1主触头闭合,电动机正常动转。因其常闭辅助触头(KM1)断开,使接触器 KM2线圈断电,因此电磁抱闸线圈回路不通电,电磁抱闸的闸瓦与闸轮分开, 电动机正常运转。
当按下停止复合按钮SB2时,因其常闭触头断开,KM1线圈断电,电动机定 子绕组脱离三相电源,同时KM1的常闭辅助触头恢复闭合。这时如果将SB2按到 底,则由于其常开触头闭合,而使KM2线圈获电,KM2触头闭合使电磁抱闸线 圈通电,吸引衔铁,使闸瓦抱住闸轮实现制动。
3、电动机制动时,KM2释放后电动机发生反转。
这是由于Ks复位太迟引起的故障,原因是Ks触点复位弹簧压力过小,应 按上述方法将复位弹簧的压力调大,并反复调整试验,直至达到合适程度。
可逆运行电动机反接制动控制
可逆运行电动机反接制动控制
双向运行的反接制动控制电路
三相异步电动机能耗制动
三相异步电动机能耗制动就是切断电动机交流电源的同时,向定子 绕组通入直流电流,将电动机转子因惯性而旋转的动能,转化为电能消 耗在转子电阻上的一种制动方法,此时转子切割静止的磁力线,产生感 应电动势和转子电流,转子电流与磁场相互作用,产生制动力矩,使电 动机迅速减速停车。
三相异步电动机电磁抱闸断电制动
如图2所示:合上电源开关QS,按动启动按钮SB1,接触器线圈KM通电, KM的主触头闭合,电动机通电运行。同时电磁抱闸线圈获电,吸引衔铁,使之 与铁心闭合,衔铁克服弹簧拉力,使杠杆顺时针方向旋转,从而使闸瓦与闸轮 分开,电动机正常运行。
当按下停止按钮SB2时,接触器线圈断电,KM主触头恢复断开,电动机断 电,同时电磁抱闸线圈也断电,杠杆在弹簧恢复力作用下向下移动,闸瓦抱住 闸轮开始制动。
电磁抱闸电缆卷筒说明文
电磁抱闸电缆卷筒说明文1. 简介电磁抱闸电缆卷筒是一种用于控制电缆布放和回收的设备,它采用电磁抱闸技术实现对电缆的精确控制。
本文将详细介绍电磁抱闸电缆卷筒的工作原理、结构组成、应用场景以及使用注意事项。
2. 工作原理电磁抱闸电缆卷筒通过控制电磁铁的通断来实现对卷筒轴上的电缆的固定和释放。
当需要固定电缆时,通入一定大小的直流或交流控制信号,使得线圈产生足够大的吸力,将卷筒轴上的摩擦盘与螺杆固定住;当需要释放电缆时,切断控制信号,使得线圈不再产生吸力,从而实现对卷筒轴上摩擦盘和螺杆的释放。
3. 结构组成3.1 主要部件•电磁铁:负责产生吸力以固定或释放卷筒轴上的电缆。
•卷筒轴:用于固定电缆,可以实现电缆的布放和回收。
•摩擦盘:与螺杆相连,通过吸力固定或释放卷筒轴上的电缆。
•螺杆:通过旋转运动实现电缆的布放和回收。
3.2 辅助部件•控制器:用于控制电磁铁的通断,从而控制卷筒轴上的电缆的固定和释放。
控制器可以根据需要设置不同的工作模式和参数。
•传感器:用于监测卷筒轴上的电缆长度、张力等参数,并将数据传输给控制器,以便进行精确控制。
4. 应用场景4.1 建筑工地在建筑工地中,常常需要使用大量的电缆进行临时供电。
使用电磁抱闸电缆卷筒可以方便快捷地布放和回收电缆,提高施工效率。
4.2 舞台演出在舞台演出中,经常需要使用大量的音视频线缆。
通过使用电磁抱闸电缆卷筒,可以有效地管理这些线缆,并且在演出结束后快速回收,方便下次使用。
4.3 港口码头在港口码头作业中,常常需要大量的电缆用于船舶供电、起重机械控制等。
使用电磁抱闸电缆卷筒可以减少人工操作,提高工作效率,并且能够确保电缆的安全性和可靠性。
5. 使用注意事项•在安装和使用电磁抱闸电缆卷筒时,请确保设备处于稳定的地面上,并采取必要的安全防护措施。
•在固定或释放电缆时,请确保控制信号准确可靠,避免误操作造成意外伤害。
•定期检查设备的运行状态和各部件的工作情况,如有异常及时进行维修或更换。
步进电机抱闸原理
步进电机抱闸原理一、步进电机简介步进电机是一种特殊的电机,它是一种数字控制电机。
与传统的电机不同,步进电机可以精确地控制旋转角度和速度。
因此,它被广泛应用于各种需要高精度控制的场合,如机器人、数控机床等。
二、步进电机抱闸原理步进电机抱闸是一种常见的电机保护措施。
当电机停止运转时,抱闸可以使电机保持在停止状态,防止电机因惯性运动而产生损坏。
步进电机抱闸原理主要是利用电磁吸力将电机停止在某一位置上。
三、步进电机抱闸的实现方式1. 机械式抱闸机械式抱闸是一种简单的抱闸方式,它利用机械装置将电机固定在某一位置上。
这种抱闸方式的优点是结构简单、可靠性高。
但是,它的缺点是需要额外的机械装置,增加了成本和复杂度。
2. 电磁式抱闸电磁式抱闸是一种常见的抱闸方式,它利用电磁吸力将电机固定在某一位置上。
这种抱闸方式的优点是结构简单、成本低、可靠性高。
但是,它的缺点是需要额外的电磁铁,增加了电路复杂度。
四、步进电机抱闸的应用举例步进电机抱闸广泛应用于各种需要高精度控制的场合。
例如:1. 机器人机器人需要精确地控制运动轨迹和姿态,步进电机抱闸可以保证机器人在停止时不会因惯性运动而产生损坏。
2. 数控机床数控机床需要精确地控制刀具的位置和速度,步进电机抱闸可以保证刀具在停止时不会因惯性运动而产生损坏。
3. 医疗设备医疗设备需要精确地控制各种运动,步进电机抱闸可以保证设备在停止时不会因惯性运动而产生损坏。
总之,步进电机抱闸是一种重要的电机保护措施,它可以保证电机在停止时不会因惯性运动而产生损坏,提高了电机的可靠性和使用寿命。
电机电磁抱闸调整方法
电机电磁抱闸调整方法
电机电磁抱闸调整方法通常包括以下几个步骤:
1. 确定电磁抱闸的位置:首先要确定电磁抱闸的位置,通常位于电机的一侧。
根据电机型号和设计,电磁抱闸可能有各种不同的安装方式,所以要确保正确地找到它。
2. 调整电磁抱闸的工作间隙:工作间隙是指电磁抱闸脱离电机时的最大距离。
工作间隙是根据具体的应用需求来确定的,一般在电机开始运行之前应进行调整。
调整间隙的方法通常是通过调节电磁抱闸上的螺栓或螺母来实现。
3. 调整电磁抱闸的释放压力:释放压力是指电磁抱闸脱离压盘的力度。
释放压力的大小通常通过调整电磁抱闸上的弹簧来实现。
调整过程中要注意保持适当的压力,以确保电磁抱闸能够可靠地脱离压盘。
4. 测试电磁抱闸的性能:调整完电磁抱闸之后,需要对其进行测试以确保其性能正常。
测试时可以将电机启动并观察电磁抱闸的工作情况,检查其是否能够稳定地脱离压盘,并在需要时重新调整。
需要注意的是,电磁抱闸调整方法可能因电机类型和具体应用而有所不同,上述步骤仅供参考,具体调整方法还需根据实际情况进行调整。
对于一些独特的电机和电磁抱闸设计,可能需要参考相关的技术文档或咨询相关的专业人士。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电磁抱闸的结构
电磁抱闸主要由两部分组成:制动电磁铁和闸瓦制动器。制
动电磁铁由铁心、衔铁和线圈三部分组成,并有单相和三相 之分。闸瓦制动器包括闸轮、闸瓦、杠杆和弹簧等,闸轮与 电动机装在同一根转轴上。机械制动强度可通过调整机械结 构来改变。电磁抱闸分为断电制动型和通电制动型两种。
电磁抱闸的结构
造成制动电磁铁延时的主要原因:制动电磁铁线圈并接在电 动机引出线上。电动机电源切断后,电动机不会立即停止转 动,它要因惯性而继续转动。由于转子剩磁的存在,使电动 机处于发电运行状态,定子绕组的感应电势加在电磁抱 闸 YB 线圈上。所以当电动机主回路电源被切断后,YB 线圈 不会立即断电释放,而是在 YB 线圈的供电电流小到不能使 动、静铁芯维持吸合时,才开始释放。 解决上述问题的简单方法是;在线圈 YB 的供电回路中 串入接触器 KM2 的动合触点。这样可使电磁抱闸 YB 的线圈 与电动机主回路同时断电,消除了 YB 的延时释放。
防止电磁抱闸延时的制动控制线路如下电源引入。
电动机通电 按下按钮 SB2→ → KM 线圈得电→→KM 动合触点闭合→实现自锁。
→KM 主触点闭合自锁→→电磁抱闸线圈得电→松开闸瓦。 →电动机 M 运行。
工作原理
电动机断电 按下按钮 SB1→ → KM 线圈断电→→KM 动合触点断开→解除自锁。 →KM 主触点断开→→电磁抱闸线圈断电→ 闸瓦抱紧制动。 →电动机失电停转。
电动机机械制动
电动机机械制动
某些生产机械,如车床等要求在工作时频繁的起动与停止;
有些工作机械,如起重机的吊勾需要准确定位,这些机械都 要求电动机在断电后迅速停转,以提高生产效率和保护安全 生产。 电动机断电后,能使电动机在很短的时间内就停转的方 法,称作制动控制。制动的方法一般有两类:机械制动、电 气制动。 利用机械装置使电动机断开电源后迅速停转的方法叫机 械制动。机械制动常用的方法有:电磁抱闸和电磁离合器制 动。
电路组成
• 1.电路组成 本电路由电源隔离开关 QS;熔断器 FU1、FU2;交流接 触器 KM;热继电器 FR;启动按钮 SB2;停机按钮 SB1; 电 动机 M 及电磁抱闸 YB 组成。 • 2.技术要求 电动机运行时时,电磁抱闸线圈通电,松开闸瓦;电动机 断电时,电磁抱闸线圈断电,闸瓦抱紧电动机转轴,迫使电动 机尽快停转。
工作原理
工作原理
• 停止 按下 SB1 电动机停止运行。 停止使用时,断开电源开关 QS。
电磁抱闸制动,在起重机械上被广泛应用。当重物吊到一定
高度, 如果线路突然发生故障或停电时,电动机断电,电磁 抱闸线圈也断电, 闸瓦立即抱住闸轮使电动机迅速制动停转, 从而防止了重物突然落下而发生事故。 采用上述控制线路,有时会因制动电磁铁的延时释放, 造成制动失灵。