多缸纯气动控制系统障碍信号消除原理分析
气动行程程序设计中几种消障方法的比较
气动行程程序设计中几种消障方法的比较杨妙;袁瑞仙;孙峰【摘要】气动行程程序设计是气压传动教学中的重要内容,其中如何消除障碍信号是教学中的重点和难点.现在主流的消障方法依然停留在采用脉冲信号和辅助阀上,随着新技术、新产品的出现,消障方法变得多样化.对比脉冲信号法、辅助阀法,以具体例子说明气动行程程序设计中出现Ⅰ型障碍采用串联法、气控延时阀以及气动节拍器进行消障的基本原理,并给出设计回路图.最后在总结各种消障方法优缺点的基础上提出消障方法的选择应综合考虑实际应用场合、使用要求以及经济成本的整体情况来选取.【期刊名称】《邢台职业技术学院学报》【年(卷),期】2018(035)001【总页数】5页(P88-92)【关键词】气压系统;障碍信号;串联法;气控延时阀;气动节拍器【作者】杨妙;袁瑞仙;孙峰【作者单位】长春汽车工业高等专科学校电气工程学院,吉林长春 130013;长春汽车工业高等专科学校电气工程学院,吉林长春 130013;长春汽车工业高等专科学校电气工程学院,吉林长春 130013【正文语种】中文【中图分类】TH138气压传动是以压缩气体为工作介质,靠气体的压力传递动力或信息的流体传动。
纯气动系统在设计过程中采用行程程序控制居多。
行程程序控制是指执行元件完成某一动作后,由行程开关发出相应信号,输入到逻辑控制回路中,由逻辑控制回路做出判断后再发出相应的执行信号,使执行元件执行下一步动作,当动作完成后,继续发出新的信号,直到完成预定的逻辑控制为止[1]。
设计行程程序控制回路必须注意信号之间是否存在干扰,有些信号使执行元件执行某一个动作,却阻碍了执行元件的下一个动作,这就形成了障碍,在回路中必须消除障碍,程序才能正常运行[2]。
目前,在程序设计中消除Ⅰ型障碍的方法主要有:脉冲信号法、辅助阀法、串联法、采用气控延时阀和气动节拍器。
本文以一个实例为载体,说明采用以上5种方法消障的优缺点并进行总结。
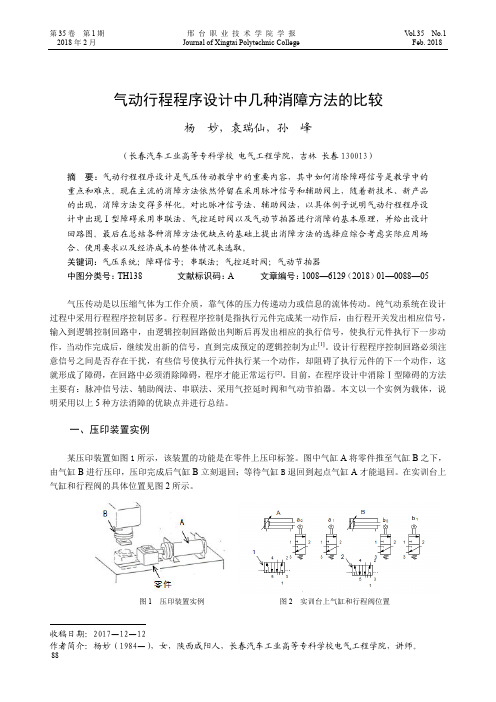
某压印装置如图1所示,该装置的功能是在零件上压印标签。
气动行程程序设计中几种消障方法的比较
第35卷 第1期 邢 台 职 业 技 术 学 院 学 报 V ol.35 No.1 2018年2月 Journal of Xingtai Polytechnic College Feb. 2018收稿日期:2017—12—12作者简介:杨妙(1984—),女,陕西咸阳人,长春汽车工业高等专科学校电气工程学院,讲师。
88气动行程程序设计中几种消障方法的比较杨 妙,袁瑞仙,孙 峰(长春汽车工业高等专科学校 电气工程学院,吉林 长春130013)摘 要:气动行程程序设计是气压传动教学中的重要内容,其中如何消除障碍信号是教学中的重点和难点。
现在主流的消障方法依然停留在采用脉冲信号和辅助阀上,随着新技术、新产品的出现,消障方法变得多样化。
对比脉冲信号法、辅助阀法,以具体例子说明气动行程程序设计中出现Ⅰ型障碍采用串联法、气控延时阀以及气动节拍器进行消障的基本原理,并给出设计回路图。
最后在总结各种消障方法优缺点的基础上提出消障方法的选择应综合考虑实际应用场合、使用要求以及经济成本的整体情况来选取。
关键词:气压系统;障碍信号;串联法;气控延时阀;气动节拍器中图分类号:TH138 文献标识码:A 文章编号:1008—6129(2018)01—0088—05气压传动是以压缩气体为工作介质,靠气体的压力传递动力或信息的流体传动。
纯气动系统在设计过程中采用行程程序控制居多。
行程程序控制是指执行元件完成某一动作后,由行程开关发出相应信号,输入到逻辑控制回路中,由逻辑控制回路做出判断后再发出相应的执行信号,使执行元件执行下一步动作,当动作完成后,继续发出新的信号,直到完成预定的逻辑控制为止[1]。
设计行程程序控制回路必须注意信号之间是否存在干扰,有些信号使执行元件执行某一个动作,却阻碍了执行元件的下一个动作,这就形成了障碍,在回路中必须消除障碍,程序才能正常运行[2]。
目前,在程序设计中消除Ⅰ型障碍的方法主要有:脉冲信号法、辅助阀法、串联法、采用气控延时阀和气动节拍器。
机械手气动程序气控系统干扰信号分析及处理
机械手气动程序气控系统干扰信号分析及处理袁小会1,蔡逸飞2,刘桂花1,付娟娟1,刘小宁1(武汉软件工程职业学院机械工程学院,武汉430205;2.通用电气(武汉)工程技术有限公司工程部,武汉430205)摘要:气动程序气控系统凭借良好的抗强磁性、抗强辐射性等优点,被广泛用于自动化生产线。
其可靠性直接影响自动化生产线的经济稳定运行。
干扰信号的分析及消除处理是复杂气动程序气控系统设计的关键,也是设计的难点。
为了提高复杂气动程序气控系统的运行稳定性,以气动机械手为例,借助其全功能图,分析探讨了干扰信号的消除方法,提出人为制造控制信号与复现信号相“与”来消除复现信号干扰的方法,为复杂气动程序气控系统的设计提供了理论依据。
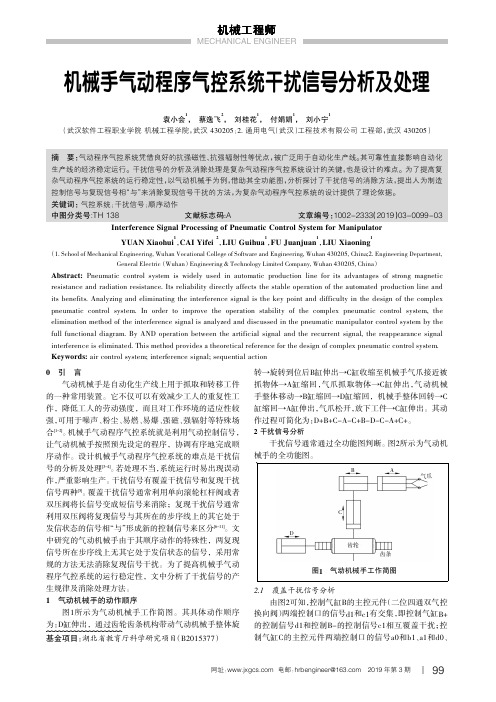
关键词:气控系统;干扰信号;顺序动作中图分类号:TH138文献标志码:粤文章编号:员园园圆原圆猿猿猿(圆园员9)03原园099原园3 Interference Signal Processing of Pneumatic Control System for ManipulatorYUAN Xiaohui1,CAI Yifei2,LIU Guihua1,FU Juanjuan1,LIU Xiaoning1(1.School of Mechanical Engineering,Wuhan Vocational College of Software and Engineering,Wuhan430205,China;2.Engineering Department, General Electric(Wuhan)Engineering&Technology Limited Company,Wuhan430205,China)Abstract:Pneumatic control system is widely used in automatic production line for its advantages of strong magnetic resistance and radiation resistance.Its reliability directly affects the stable operation of the automated production line and its benefits.Analyzing and eliminating the interference signal is the key point and difficulty in the design of the complex pneumatic control system.In order to improve the operation stability of the complex pneumatic control system,the elimination method of the interference signal is analyzed and discussed in the pneumatic manipulator control system by the full functional diagram.By AND operation between the artificial signal and the recurrent signal,the reappearance signal interference is eliminated.This method provides a theoretical reference for the design of complex pneumatic control system. Keywords:air control system;interference signal;sequential action0引言气动机械手是自动化生产线上用于抓取和转移工件的一种常用装置。
气动控制回路的原理是什么

气动控制回路的原理是什么气动控制回路是一种利用气体流体力学原理控制工程系统的闭环控制系统。
主要由气源、执行器、传感器、控制器和反馈信号组成。
其原理基于气体在管道中的流动特性和压力变化,通过改变气流的速度、压力、方向等参数,从而控制执行器的位置或动作。
首先,气动控制回路的气源提供压缩空气或气体供给系统。
气源通常由一台压缩机提供,通过压缩机将大气中的气体压缩至较高压力,然后通过管道输送至气动执行器。
气动执行器是气动控制回路的核心部分,用于完成各种机械运动任务。
它可以是气缸、气动电机、气动阀门等。
气缸是最常见的执行器,其内部通过压缩空气产生推力,从而实现物体的运动。
气动电机则是利用压缩空气带动转子实现旋转运动。
为了实现对气动执行器的精准控制,气动控制回路还需要添加传感器和控制器。
传感器可以测量气流的流量、压力或温度等参数,将其转换为电信号,并传送给控制器。
常见的传感器有流量计、压力传感器和温度传感器等。
控制器接收传感器的信号,与设定值进行比较,根据差异信号进行逻辑运算,并输出控制信号给执行器,从而实现对执行器的精确控制。
在气动控制回路中,反馈信号的作用至关重要。
反馈信号可以提供对执行器位置或动作状态的实时监测,从而实现自动调整和校正。
常见的反馈信号有位置传感器、编码器等。
控制器将反馈信号与设定值进行比较,并根据差异信号进行反馈控制,以达到控制目标。
除了以上组成部分外,气动控制回路还包括管道、连接件和阀门等。
管道负责气体的输送和传递,连接件用于连接不同部件,而阀门用于控制气体的流量和压力。
阀门可以是手动操作的,也可以是电动或气动驱动的,用于调节或切断气体流动。
总结而言,气动控制回路的原理是基于气体流体力学原理,在气源的供气作用下,通过控制器和传感器对执行器进行精确控制,实现对工程系统的闭环控制。
它具有结构简单、动作迅速、承载能力大、使用寿命长等优点,在工业自动化控制和生产线上得到广泛应用。
多缸动作回路的故障分析与排除

①行程开关方面:如因行程开关安装不牢靠、 因多次碰撞松动、行程开关本身的质量等原 因造成行程开关不能可靠地准确发讯,导致 不顺序动作,可查明原因予以排除; ②电路故障:如接线错误,电磁铁接线不牢 靠或断线,以及其它电器元件的故障等,造 成顺序动作紊乱或不顺序动作,查明原因予 以排除; ③活塞杆上撞块因磨损或松动不能可靠压下 行程开关,或撞块安装紧固位置不对,使行 程开关不能可靠与准确发讯,造成顺序动作 失常,可针对原因逐一排除。
(2)采用同步缸的同步回路(图4—42) )采用同步缸的同步回路( 这是用尺寸相同、共用一活塞杆的两个同步 缸1与缸2,向两个工作腔供给同流量的油, 与缸2 从而保证两工作油缸5与缸6 从而保证两工作油缸5与缸6运动同步的回路, 同步精度可达1 同步精度可达1%。 这种回路不同步(或同步精度差) 这种回路不同步(或同步精度差)的原因主要是: 同步缸的制造误差、工作油缸的制造误差和 系统泄漏、工作油缸行程太长及高压下负载 又不均匀时,会产生一个缸先行到底的不同 步现象。
①各个阀的调节压力不当或者在使用过程中 因某些原因而变化。 例如为了防止压力继电器在夹紧缸1 例如为了防止压力继电器在夹紧缸1未到达夹 紧行程终点之前就误发信号,压力继电器调 节压力应比夹紧缸的夹紧压力大0.3~0.5MPa; 节压力应比夹紧缸的夹紧压力大0.3~0.5MPa; 为了保证在工件没有可靠夹紧之前不出现缸2 为了保证在工件没有可靠夹紧之前不出现缸2 先进给的情况,减压阀5 先进给的情况,减压阀5的的调整压力比压力 继电器的调整压力高O.3~O.5MPa;溢流阀8 继电器的调整压力高O.3~O.5MPa;溢流阀8 的调整压力既要比阀5的调整压力高0.2~ 的调整压力既要比阀5的调整压力高0.2~ O.3MPa,又要比缸2的最大工作压力大O.3~ O.3MPa,又要比缸2的最大工作压力大O.3~ 0.4MPa,要采用失压发讯。 0.4MPa,要采用失压发讯。
燃气清码obd的工作原理

燃气清码obd的工作原理
燃气清码OBD(On-Board Diagnostics)是一种车辆故障诊断系统,用于检测和报告车辆发动机和其他主要组件的故障信息。
它的工作原理如下:
1. 监控传感器和执行器:OBD系统连接到车辆的发动机控制单元(ECU),监测发动机的各种传感器和执行器的工作情况,例如氧气传感器、节气门位置传感器、冷却液温度传感器等。
2. 故障码检测:OBD系统会定期检查车辆的传感器和执行器的工作状态,如果发现任何异常或故障,会生成一个故障码。
故障码是一种数字代码,表示特定的故障类型或系统问题。
例如,P0300代码表示发动机多缸间随机失火。
3. 故障码存储和报告:一旦生成故障码,OBD系统会将其存储在ECU的内部存储器中。
同时,故障码也会通过OBD接口传输到连接的外部设备上,如汽车修理工的扫描工具或车辆所有者的OBD读码器。
这样,车辆的故障信息可以被轻松读取和分析。
4. 包括实时数据的额外信息:除故障码外,OBD系统还可以传输一些实时数据给外部设备,例如发动机转速、车速、进气温度等。
这些数据可以帮助技师或车主更好地理解车辆的性能和运行状况。
总之,燃气清码OBD通过监测车辆传感器和执行器的工作状态,检测并报告故
障信息,以提供车辆诊断和维修的便利性。
气动系统常见故障解决方法
气动系统常见故障解决方法1.气动执行元件(气缸)故障由于气缸装配不当和长期使用,气动执行元件(气缸)易发生内、外泄漏,输出力不足和动作不平稳,缓冲效果不良,活塞杆和缸盖损坏等故障现象。
(1)气缸出现内、外泄漏,一般是因活塞杆安装偏心,润滑油供应不足,密封圈和密封环磨损或损坏,气缸内有杂质及活塞杆有伤痕等造成的。
所以,当气缸出现内、外泄漏时,应重新调整活塞杆的中心,以保证活塞杆与缸筒的同轴度;须经常检查油雾器工作是否可靠,以保证执行元件润滑良好;当密封圈和密封环出现磨损或损环时,须及时更换;若气缸内存在杂质,应及时清除;活塞杆上有伤痕时,应换新。
(2)气缸的输出力不足和动作不平稳,一般是因活塞或活塞杆被卡住、润滑不良、供气量不足,或缸内有冷凝水和杂质等原因造成的。
对此,应调整活塞杆的中心;检查油雾器的工作是否可靠;供气管路是否被堵塞。
当气缸内存有冷凝水和杂质时,应及时清除。
(3)气缸的缓冲效果不良,一般是因缓冲密封圈磨损或调节螺钉损坏所致。
此时,应更换密封圈和调节螺钉。
(4)气缸的活塞杆和缸盖损坏,一般是因活塞杆安装偏心或缓冲机构不起作用而造成的。
对此,应调整活塞杆的中心位置;更换缓冲密封圈或调节螺钉。
2.换向阀故障换向阀的故障有:阀不能换向或换向动作缓慢,气体泄漏,电磁先导阀有故障等。
(1)换向阀不能换向或换向动作缓慢,一般是因润滑不良、弹簧被卡住或损坏、油污或杂质卡住滑动部分等原因引起的。
对此,应先检查油雾器的工作是否正常;润滑油的粘度是否合适。
必要时,应更换润滑油,清洗换向阀的滑动部分,或更换弹簧和换向阀。
(2)换向阀经长时间使用后易出现阀芯密封圈磨损、阀杆和阀座损伤的现象,导致阀内气体泄漏,阀的动作缓慢或不能正常换向等故障。
此时,应更换密封圈、阀杆和阀座,或将换向阀换新。
(3)若电磁先导阀的进、排气孔被油泥等杂物堵塞,封闭不严,活动铁芯被卡死,电路有故障等,均可导致换向阀不能正常换向。
对前3种情况应清洗先导阀及活动铁芯上的油泥和杂质。
多位气缸原理

多位气缸原理
多位气缸是指在同一工作行程内,多个气缸同时工作以提高工作效率的一种气动传动装置。
多位气缸的原理是通过合理的气路设计和控制方式,使多个气缸在同一时间内分别完成各自的工作,从而实现整个系统的协调运动。
首先,多位气缸的工作原理是基于气体压力传递的。
在气动系统中,气源通过气路传递给多个气缸,通过控制气源的开关,可以使气缸按照设计好的顺序和时间完成各自的工作。
这种方式可以有效地提高工作效率,节约能源。
其次,多位气缸的原理还包括气缸的同步运动和协调控制。
在多位气缸系统中,气缸之间需要进行同步运动,以确保整个系统的稳定性和准确性。
通过合理的气路设计和控制方式,可以实现多个气缸的同步运动,从而提高系统的工作精度和效率。
另外,多位气缸还可以通过合理的气路设计和控制方式实现不同工作状态下的切换。
在实际工程中,多位气缸系统通常需要在不同的工作状态下进行切换,例如正转、反转、停止等。
通过合理的气路设计和控制方式,可以实现多位气缸在不同工作状态下的快速
切换,从而满足不同工况下的工作需求。
总之,多位气缸的原理是通过合理的气路设计和控制方式,使多个气缸在同一时间内分别完成各自的工作,从而提高整个系统的工作效率和精度。
多位气缸系统在自动化生产线、机械加工等领域有着广泛的应用,对于提高生产效率和质量具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多缸纯气动控制系统障碍信号消除原理分析周钦河【摘要】Obstacle signal always exists in multi-cylinder sequential action pure pneumatic system. There were several shortcomings in time-delay valve pulse obstacle signal elimination method, such as poor pulse width applicability and time inaccuracy. Based on the analysis of obstacle signal elimination principle for multi-cylinder pure pneumatic control system, this paper presented a obstacle signal elimination method based on step control for pneumatic control system. Its internal structure was designed and applied to the multi-cylinder pure pneumatic control system. By using FluidSIM software, obstacle signal elimination method was simulated respectively based on step pulse method and delay-time pulse method. The results show that obstacle signal can be directly eliminated only by replacing common stroke valve with pneumatic stepping pulse stroke valve, without complex analysis or increasing memory elements, and it is suitable for pneumatic systems with different strokes and movement speeds. With this method, it is simple and fast to intuitively eliminate the obstacle signal with features such as simple structure and low cost, which simplifies the design of multi-cylinder pure pneumatic control system.%多缸顺序动作纯气动系统常常存在障碍信号,针对目前延时阀脉冲消障法存在的脉冲宽度难以调节、时间精度较差等不足,本文分析多缸纯气动控制系统障碍信号消除原理,利用步进控制思路,提出一种基于步进脉冲的气动控制系统障碍信号消除方法,并设计其内部结构,应用于多缸纯气动控制系统.通过FluidSIM软件,分别对采用步进脉冲法和延时脉冲法消除障碍信号进行仿真,仿真结果表明:只需采用气动步进脉冲行程阀代替普通行程阀,即可直接消除障碍信号,无需进行复杂分析或增加记忆元件,且适用于不同行程与运动速度的气动系统.采用该方法进行障碍信号消除快捷、直观、结构简单且成本较低,简化多缸纯气动控制系统设计.【期刊名称】《中国测试》【年(卷),期】2017(043)005【总页数】5页(P115-119)【关键词】纯气动系统;障碍信号;消除原理【作者】周钦河【作者单位】广东水利电力职业技术学院机械工程系,广东广州 510925【正文语种】中文多缸纯气动控制系统因具有防火、防爆、防潮能力,广泛应用于环境恶劣的场合[1-2]。
在多缸顺序动作纯气动系统中,气缸动作的滞后特性强,与驱动信号不同步[3]。
在气缸切换动作时,若主控阀两端同时存在驱动信号,将导致换向阀无法换向,因此该障碍信号必须消除。
消除障碍信号常用方法有试凑法、脉冲信号法、串级法与信号-动作图法等,其中试凑法利用经验尝试不同的信号来消障,调试时间较长,适合于简单回路[4-5];脉冲信号法通常采用延时阀将障碍信号变成脉冲信号,原理简单,但需要增加硬件成本[6-7];串级法分级独立供气隔离主控阀两端驱动信号,若级数较多,则记忆元件与输出管路呈指数增长[8];信号-动作图法通过绘制信号、动作线图精确定位障碍信号,结合与门互锁消除障碍信号,适用于复杂系统设计,但设计周期较长[9-10]。
本文分析了多缸纯气动控制系统障碍信号的消除机理,结合行程阀与脉冲阀,将障碍信号变成脉冲信号,利用步进控制思路提出气动步进脉冲行程阀机理,该方法直观、快捷、成本低,实现纯气动控制系统快速设计。
障碍信号在回路中具体表现为换向阀两端同时存在驱动信号,若先到信号影响后到信号,使换向阀无法换向,先到信号即为障碍信号[11]。
图1为某纯气动控制系统及其信号-动作图。
如图1(a)所示,当气缸执行伸出动作B1到b1时,此时虽然行程阀b1有信号到主换向阀右位,但左位先到的a1信号未消失,使得换向阀两端同时存在信号,无法实现下一动作B0,a1为障碍信号。
图1(b)为该控制系统的信号-动作图,障碍信号表现为同组中信号线比动作线长,长的部分为障碍段。
可以采用缩短障碍信号的存在时间,去掉障碍段以消除障碍信号,使其变为无障碍的执行信号去控制主换向阀。
消除障碍后的执行信号必须满足两个条件:1)起点不能变,否则无法准确驱动同组动作;2)执行信号线不能长于所控制的动作线。
脉冲信号消障法是在产生障碍信号的行程阀回路中串联常通型延时阀,延时断开障碍信号,将其变成脉冲信号。
如图2所示,延时阀在b1信号到来之前将a1信号断开,保证主换向阀顺利换向。
采用该方法消除障碍信号,其脉冲宽度需要根据不同气缸的行程与运动速度进行调节,时间精度较差,难以满足现代工业控制中高精度的要求,因此,有必要开发结构简单、运行可靠、控制精准的脉冲行程阀。
图3为气动步进脉冲阀机理与障碍信号消除原理图。
气动步进脉冲障碍信号消除原理如图3(a)所示,由一个行程阀与一个气动阀串联组成,进气口P接气源,行程阀被压下则产生原始驱动信号S1,即图3(b)中的信号①;气动阀导通控制口K1接上一步动作的执行信号,截止控制口K2接下一步动作的执行信号,即图3(b)中的信号②;两个阀串联后输出最终的执行信号S2,即图3(b)中的信气动步进脉冲障碍信号消除原理如图3(b)所示,信号③由信号①和信号②相与而来,这样保证信号③不会长于其驱动的动作线,障碍信号消除。
根据图3(a),可以设计如图4所示的气动步进脉冲行程阀[12]。
该步进脉冲行程阀由阀体1、滑阀芯2、行程杆3、弹簧4、球阀芯5和弹簧6组成,包括进气口P、导通控制口K1、截止控制口K2、行程阀正常出气口S1、步进脉冲出气口S2以及排气口O。
根据图3(b),该气动步进脉冲行程阀消除障碍信号的工作机理为:1)滑阀芯2可以在阀体1中滑动,其左右两个端面分别对应导通控制口K1、截止控制口K2,由导通控制口K1、截止控制口K2的输入信号控制滑阀芯2处于右位或左位两个位置:①当滑阀芯2处于右位时,步进脉冲出气口S2与行程阀正常出气口S1之间截止;②当滑阀芯2处于左位时,步进脉冲出气口S2与行程阀正常出气口S1之间导通。
2)行程杆3在外力作用下可以被按下,外力撤去后在弹簧4的作用下可以复位:①行程杆3在原位时,球阀芯5在弹簧6作用下封住阀口,使进气口P与行程阀正常出气口S1之间截止;②当行程杆3被按下时,行程杆3进一步按压球阀芯5,封住的阀口被打开,使进气口P与行程阀正常出气口S1之间导通。
3)当上一步动作开始时,导通控制口K1有信号输入,步进脉冲出气口S2与行程阀正常出气口S1之间导通,行程阀处于准备状态。
当上一步动作完成时,压下行程杆3,行程阀导通,步进脉冲出气口S2、行程阀正常出气口S1均有输出,其中步进脉冲出气口S2作为执行信号控制该步动作,行程阀正常出气口S1可以输出控制上一步执行信号结束。
当该步动作完成时,截止控制口K2有信号输入,行程阀截止,该步执行信号结束,从而精确消除主控换向阀一端的障碍信号,使其能够顺利切换位置。
该行程阀结构简单,使用方便,能够精准消除障碍信号,实现精确图5是该障碍信号消除方法在钻床气动控制回路中的具体应用实例,其气缸工作流程为“A1B1B0A0”。
行程阀正常出气口S1无外接气管时,可将该口堵塞。
通过FluidSIM软件仿真,图6为该系统的气缸动作状态图,可以看出,动作迅速,系统运行正常。
用该气动步进脉冲行程阀代替普通行程阀,即可直接消除障碍信号,无需进行复杂分析和增加记忆元件,结构简单。
如果将气动步进脉冲行程阀换成延时阀与行程阀组合(如图2所示),则延时阀开口的调节对气缸动作周期影响较大,如图7所示。
其脉冲宽度需要根据不同气缸的行程与运动速度进行调节,时间精度较差。
本文分析了多缸纯气动控制系统障碍信号的消除原理,利用步进控制思路,提出一种基于步进脉冲的气动控制系统障碍信号消除方法,利用上一步动作与下一步动作的执行信号来控制当前信号的导通与截止,保证该信号线长度一定不会超过其驱动的动作线,从而消除障碍信号;设计一种新的气动步进脉冲行程阀并应用于钻床多缸气动系统。
该障碍信号的消除原理可以精准消除主控换向阀一端的障碍信号,简化了多缸纯气动控制系统设计。
【相关文献】[1]SUCHSLAND J,WINTER T,GREISER A,et al.Extending laboratory automation to the wards:effect of an innovative pneumatic tube system on diagnostic samples and transport time[J].Clinical Chemistry and Laboratory Medicine,2017,55(2):225-230. [2]张俊鑫,范伟军,王学影,等.双通道气液压力机的设计研制[J].中国测试,2016,42(4):75-80.[3]TANG L,WANG J D.Estimation of the most critical parameter for the two-movement method to compensate for oscillations caused by control valve stiction[J].IEEE Transactions on Control Systems Technology,2016,24(5):1869-1874.[4]张建成,毛智勇,刘建.阀控不对称液压缸系统改进控制策略研究[J].现代制造工程,2015(5):120-125.[5]屈圭,吴晓丹,曾豪华.煤矿用机械手全气动控制系统设计[J].液压与气动,2009(8):27-31.[6]林荣川,魏莎莎.多气缸顺序回路信号障碍消除及程序控制系统设计[J].包装与食品机械,2009,27(2):24-26.[7]马晓明.基于X_D线图的多缸多往复气动回路设计[J].制造技术与机床,2011(5):75-78.[8]叶金玲,周钦河,赖乙宗.自动化生产线机械手全气动控制系统设计[J].制造技术与机床,2014(4):79-82.[9]刘婷婷,关波.比例阀测试系统的设计与实现[J].中国测试,2014,40(2):86-89.[10]LI J X,ZHAO S D.Optimization of valve opening process for the suppression of impulse exhaust noise[J]. Journal of Sound and Vibration,2017(389):24-40.[11]周钦河,叶金玲.液压与气动技术[M].安徽:合肥工业大学出版社,2012.[12]周钦河.一种气动步进脉冲行程阀:CN105221511A[P]. 2016-01-06.。