自动控制原理第二章3
东南大学成贤学院自动控制原理ppt(程鹏主编第二版)第二章3
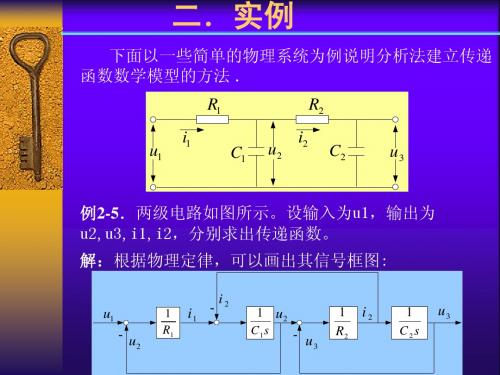
三.框图变换的梅森公式
P (s) 1
从输入信号沿箭头方向一直向前到输出信号y的第 一个前向通道中各环节传递函数的乘积; 与第一个前向通道不相接触的闭合回路中传递函数 的乘积之和; 与第一个前向通道不相接触,且互不接触的每两个 闭合回路中传递函数的乘积之和; 从输入信号沿箭头方向一直向前到输出信号的第二 个前向通道中各环节传递函数的乘积; 与第二个前向通道不相接触的闭合回路中传递函数 的乘积之和; 与第二个前向通道不相接触,且互不接触的每两个 闭合回路中传递函数的乘积之和;
Δ 1 L1(s) L2(s) 1 R1C1 s R2 C 2 s R2 C1 s R1 R2 C1C 2 s 2
(1)从输入u1到输出u3只有一个前向通道,无与前向通道 不接触的闭合回路,所以:
1 P1(s) R1 R2C1C2 s 2
1 U 3(s) R1 R2 C1C 2 s 2 G1(s) 1 1 1 1 U 1(s) 1 R1C1 s R2 C1 s R2 C 2 s R1 R2 C1C 2 s 2 1 R1 R2 C1C 2 s 2 (R1C1 R1C 2 R2 C 2 )s 1
输入力为FA,阻尼系数B由油缸的 针阀调整,调整好后为常数。求输 出y与输入FA的传递函数 解:根据牛顿第二定律:
d2y F m a m dt 2
FA
m
y
Fd Ky
dy Fz B dt
K FA Fd Fz B
1 m
Y(s) 1 G(s) 2 FA(s) m s Bs K
I1(s) R2 C1C2 s 2 (C1 C2 )s G1 (s) U1(s) R1 R2 C1C2 s 2 (R1C1 R1C2 R2 C2 )s 1
自动控制原理第二章复习总结(第二版)
⾃动控制原理第⼆章复习总结(第⼆版)第⼆章过程装备控制基础本章内容:简单过程控制系统的设计复杂控制系统的结构、特点及应⽤。
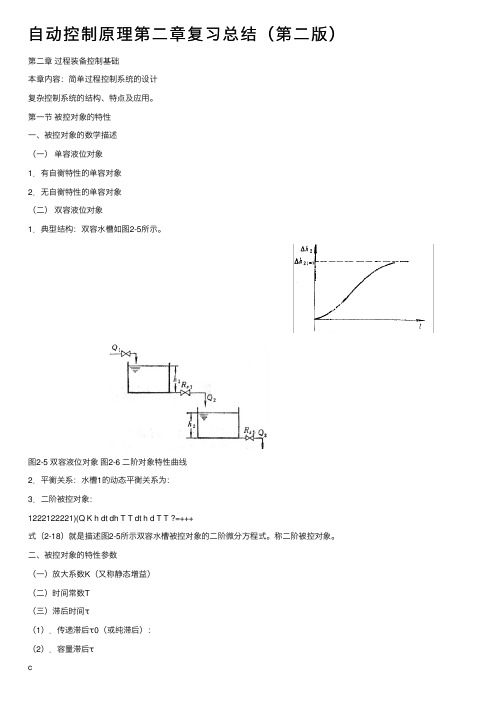
第⼀节被控对象的特性⼀、被控对象的数学描述(⼀)单容液位对象1.有⾃衡特性的单容对象2.⽆⾃衡特性的单容对象(⼆)双容液位对象1.典型结构:双容⽔槽如图2-5所⽰。
图2-5 双容液位对象图2-6 ⼆阶对象特性曲线2.平衡关系:⽔槽1的动态平衡关系为:3.⼆阶被控对象:1222122221)(Q K h dt dh T T dt h d T T ?=+++式(2-18)就是描述图2-5所⽰双容⽔槽被控对象的⼆阶微分⽅程式。
称⼆阶被控对象。
⼆、被控对象的特性参数(⼀)放⼤系数K(⼜称静态增益)(⼆)时间常数T(三)滞后时间τ(1).传递滞后τ0(或纯滞后):(2).容量滞后τc可知τ=τ0+τc。
三、对象特性的实验测定对象特性的求取⽅法通常有两种:1.数学⽅法2.实验测定法(⼀)响应曲线法:(⼆)脉冲响应法第⼆节单回路控制系统定义:(⼜称简单控制系统),是指由⼀个被控对象、⼀个检测元件及变送器、⼀个调节器和⼀个执⾏器所构成的闭合系统。
⼀、单回路控制系统的设计设计步骤:1.了解被控对象2.了解被控对象的动静态特性及⼯艺过程、设备等3.确定控制⽅案4.整定调节器的参数(⼀)被控变量的选择(⼆)操纵变量的选择(三)检测变送环节的影响(四)执⾏器的影响⼆、调节器的调节规律1.概念调节器的输出信号随输⼊信号变化的规律。
2.类型位式、⽐例、积分、微分。
(⼀)位式调节规律1.双位调节2.具有中间区的双位调节3.其他三位或更多位的调节。
(⼆)⽐例调节规律(P )1.⽐例放⼤倍数(K )2.⽐例度δ3.⽐例度对过渡过程的影响(如图2-24所⽰)4.调节作⽤⽐例调节能较为迅速地克服⼲扰的影响,使系统很快地稳定下来。
通常适⽤于⼲扰少扰动幅度⼩、符合变化不⼤、滞后较⼩或者控制精度要求不⾼的场合。
(三)⽐例积分调节规律(PI )1.积分调节规律(I )(1)概念:调节器输出信号的变化量与输⼊偏差的积分成正⽐==?t I t I dt t e T dt t e K t u 00)(1)()(式中:K I 为积分速度,T I 为积分时间。
自动控制原理课后习题答案第二章

第 二 章2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。
分析 首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:2221212112212211212112212122111()1()111oiR u C s R R C C s R C R C R C s R u R R C C s R C R C R C C sR C s R C s+++++==+++++++即220012121122121212112222()()i i o id u du d u duR R C C R C R C R C u R R C C R C R C u dt dt dt dt++++=+++取A 、B 两点进行受力分析,可得:o 112()()()i o i o dx dx dx dx f K x x f dt dt dt dt -+-=- o 22()dx dxf K x dt dt -= 整理可得:2212111221121212211222()()o o i i o id x dx d x dx f f f K f K f K K K x f f f K f K K K x dt dt dt dt ++++=+++经比较可以看出,电网络(a )和机械系统(b )两者参数的相似关系为1112221211,,,K f R K f R C C2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1) ;)()(2t t x t x =+(2))。
自动控制原理第二章梅森公式-信号流图课件
ABCD
然后,通过分析梅森公式 的各项系数,确定系统的 极点和零点。
最后,将梅森公式的分析 结果转换为信号流图,进 一步明确系统各变量之间 的传递关系。
梅森公式在信号流图中的应用实例
假设一个控制系统的传递函数为 (G(s) = frac{s^2 + 2s + 5}{s^2 + 3s + 2})
在信号流图中,将极点和零点表示为相 应的节点,并根据梅森公式的各项系数 确定各节点之间的传递关系。
02
信号流图基础
信号流图定义与构成
信号流图定义
信号流图是一种用于描述线性动 态系统数学模型的图形表示方法 ,通过节点和支路表示系统中的 信号传递和转换过程。
信号流图构成
信号流图由节点和支路组成,节 点表示系统的动态方程,支路表 示输入输出之间的关系。
信号流图的绘制方法
确定系统动态方程
根据系统描述,列出系统的动态方程。
2
梅森公式与信号流图在描述和分析线性时不变系 统时具有互补性,二者可以相互转换。
3
信号流图能够直观地表示系统各变量之间的传递 关系,而梅森公式则提供了对系统频率特性的分 析手段。
如何使用梅森公式进行信号流图分析
首先,将系统的传递函数 转换为梅森公式的形式。
根据极点和零点的位置, 判断系统的稳定性、频率 响应特性等。
在未来研究中的可能发展方向
随着科技的不断进步和应用需求的不断变化,控制系统面临着越来越多的 挑战和机遇。
在未来研究中,可以利用梅森公式和信号流图进一步探索复杂系统的分析 和设计方法,提高系统的性能和稳定性。
同时,随着人工智能和大数据技术的应用,可以结合这些技术对控制系统 进行智能化分析和优化设计,提高系统的自适应和学习能力。
自动控制原理第二版课后答案
自动控制原理第二版课后答案1. 介绍。
自动控制原理是现代自动化领域中的重要基础课程,它涉及到控制系统的设计、分析和应用,对于工程技术人员来说具有重要的意义。
本文档将针对自动控制原理第二版课后习题进行详细解答,帮助学习者更好地掌握课程内容。
2. 第一章。
2.1 课后习题1。
答,根据控制系统的基本结构,可以将其分为开环控制系统和闭环控制系统。
开环控制系统中,控制器的输出不受到被控对象的影响,而闭环控制系统中,控制器的输出受到被控对象的影响。
闭环控制系统具有更好的稳定性和鲁棒性,但也更加复杂。
2.2 课后习题2。
答,传递函数是描述控制系统输入和输出之间关系的数学模型,其形式为输出变量的拉普拉斯变换除以输入变量的拉普拉斯变换。
传递函数可以帮助我们分析控制系统的性能和稳定性,并进行控制器的设计。
3. 第二章。
3.1 课后习题1。
答,稳定性是控制系统设计中需要考虑的重要因素,它决定了系统在受到干扰或参数变化时的表现。
稳定性分析可以通过判据、根轨迹和频域等方法进行,其中判据法是最为直观和简单的方法,通过对系统的特征方程进行判别来判断系统的稳定性。
3.2 课后习题2。
答,根轨迹是一种描述控制系统特征方程根在复平面上运动规律的方法,它可以直观地反映系统的稳定性、过渡过程和静态误差等性能指标。
通过对根轨迹的分析,可以帮助我们设计合适的控制器来满足系统性能指标的要求。
4. 第三章。
4.1 课后习题1。
答,比例控制器是一种简单的控制器,它的输出与系统的误差成正比。
比例控制器可以改善系统的静态误差性能,但无法消除系统的稳定性问题和过渡过程中的振荡。
4.2 课后习题2。
答,积分控制器是一种消除系统静态误差的控制器,它的输出与系统的误差积分成正比。
积分控制器可以有效地消除系统的静态误差,但在实际应用中可能会导致系统的过度调节和振荡。
5. 总结。
通过对自动控制原理第二版课后习题的详细解答,我们可以更好地理解控制系统的基本原理和设计方法。
自动控制原理:第二章--控制系统数学模型全
TaTLma KJe K
dMdML m dtdt
L
Tm
Ra J K eKm
——机电时间常数(秒);
Ta
La Ra
—电动机电枢回路时间常数 (秒)
若输出为电动机的转角q ,则有
TaTm
d 3q
dt 3
Tm
d 2q
dt 2
dq
dt
1 Ke
ua
Tm J
ML
TaTm J
dM L dt
—— 三阶线性定常微分方程 9
(1)根据克希霍夫定律可写出原始方程式
((23))式消LuLCcdd中去(titd)i中2d是utRc间2(中Cti1)变间C1量iR变dCti量idd后udt,ct,(t它)u输r与u(入tc输)(输t)出出uu微rc((tt)分)有方如程下式关系
或
T1T2
d 2uc (t) dt 2
T2
duc (t) dt
扰动输入为负载转矩ML。 (1)列各元件方程式。电动机方程式为:
TaTm
d 2w
dt 2
测输T速Km出发td为d电wt电测压机速w 反 K馈1e系ua数
Tm J
M反L馈 电TaJT压m
dM L dt
ua Kae ut Ktw e ur ut 12
(2)消去中间变量。从以上各式中消去中间变
量ua,e,ut,最后得到系统的微分方程式
线性(或线性化)定常系统在零初始条件下, 输出量的拉氏变换与输入量的拉氏变换之比 称为传递函数。
令线C性(s定)=常L[c系(t统)],由R下(s)述=Ln阶[r(微t)]分,方在程初描始述条:件为零
时[[aab,nnmbssdmdn进mt+ndn+dt行acmmbn(tm拉-r1)-(s1t氏ns)-am1变n+-1b1+…m换dd…1t+,nndd+1a1t得mm1bcs1(11到+ts)r+a关(t0b)]于0C]的RD(sM的s的a(()分s1s(分))=代sdbd为母)t1子为数cd传d多(tt多传方)r递项(项t程递函)式a式0函数c。b(0数tr) (t)
自动控制原理第二章3
第三节控制系统的结构图和信号流图
N(s) R(s) C(s) G1(s) G2(s)
+ _
H(s) 典型反馈控制系统方框图 1)信号线:带单向箭头,表示信号流向 信号线:带单向箭头, 2)引出点:信号从引出点分开,大小和性质相同 引出点:信号从引出点分开, 3)比较点:两个或两个以上的信号相加减 比较点: 4)方框:对信号进行数学变换,方框中写入环节的传递函数 方框:对信号进行数学变换,
R1 C2S 1 C(S) 1 1 R2 +R1C R2 +1)C2S C2S2S
R(s)
_
1 R1C1S+1 R1C2S
1 R2C2S+1
C(s)
第三节控制系统的结构图和信号流图
三、控制系统的信号流图: 控制系统的信号流图:
1、定义 、 一组线性代数方程式变量间传递关系的图形表示, 一组线性代数方程式变量间传递关系的图形表示,由节 支路和支路增益组成。 点、支路和支路增益组成。 y1 典型的信号流图 x1 1 x2 a e a y2=ay1 d x3 b f x4 c x5 g 1 x6 y2
第三节控制系统的结构图和信号流图
绘制动态结构图的一般步骤为: 绘制动态结构图的一般步骤为 (1)确定系统中各元件或环节的传递函数。 )确定系统中各元件或环节的传递函数。 (2)绘出各环节的方框,方框中标出其传 )绘出各环节的方框, 递函数、输入量和输出量。 递函数、输入量和输出量。 (3)根据信号在系统中的流向,依次将各 )根据信号在系统中的流向, 方框连接起来。 方框连接起来。
p1 = abc
L1与L3
p2 = d
L3 = g L2与L3
L1 = ae
L2 = bf
自动控制原理-第二章 控制系统的数学模型
t
f (t)dt 0
t
f ( )d
n
ki .L[ f (t )]
i 1
sF (s) f (0 )
s2F (s) sf (0 ) f (0 )
snF (s) sn1 f (0 ) sn2 f (0 ) f (n1) (0 )
电枢回路方程为
La
dia (t) dt
Raia (t)
Ea (t)
ua (t)
电磁转矩方程 M m Cmia (t)
电动机轴上转矩平衡方程
Jm
dm (t)
dt
fmm (t)
Mm
MC
(t)
若以角速度 m 为输出量、电枢电压 ua 为输入量,
消去中间变量,直流电动机的微分方程为
(s2+s+1)Uc(s)= Ur(s)+0.1(s+2)
即 U S 1 U S 0.1S 2
C
S2 S 1 r
S2 S 1
通电瞬间, ur(t)=1 或 Ur(s)=L[ur(t)]=1/S
故 U S 1 1 0.1S 2
C
S2 S 1 S S2 S 1
再对上式两边求反拉氏变换:
u c
t
L1 U C
S
L1
S
2
1 S
1
1 S
S
2
1 S
1
=1+1.15e-0.5tSin(0.866t-120°)+ 0.2e-0.5tSin(0.866t+30°)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
autocumt@
C
C(s)
-
-
B
22
中国矿业大学信电学院
二、系统方框图的等效变换和化简
G4 R(s) G1 G2 A G3 H2 H1
C
自动控制原理
C(s)
-
-
B
G5 G2 G3 G4
R(s) G1
G7
G6
G5
C(s)
-
H1G2
autocumt@
U1 ( s )
1 R1
I1 ( s )
U 3 (s)
6
中国矿业大学信电学院
一、控制系统方框图的组成
I 2 (s)
U 3 (s)
I1 ( s )
U1 ( s )
自动控制原理
1 U 2 (s) sC2
1 R1
I1 ( s )
I 2 (s)
1 U 3 (s) sC1
第五节 控制系统的方框图及其等效变换
自动控制原理
控制系统的结构图是描述系统各组成元件之间信号传递关系 的数学图形=原理图+元件数学模型。特点:直观。
一、控制系统方框图的组成
前向通道函数 偏差
输入
R(s) E(s)
输出
比较点
G(s)
C(s)
引出点
H(s)
反向通道函数
autocumt@
1
中国矿业大学信电学院
G ( s ) Gi ( s )
i 1
n
n为相并联的环节数,当然还有“-”的情况。
结论:并联环节的等效传递函数等于并联环节传递函数的代数和。
autocumt@ 12
中国矿业大学信电学院
二、系统方框图的等效变换和化简
自动控制原理
(3)反馈连接(闭环控制系统)
R(s)
E(s) - B(s)
autocumt@ 13
中国矿业大学信电学院
二、系统方框图的等效变换和化简
自动控制原理
G4 G2G3
假如没有A点的引出线
R(s) G1
G4 G2 A G3 H2
C
C(s)
H1
-
B
它很讨厌!!!
autocumt@ 14
中国矿业大学信电学院
二、系统方框图的等效变换和化简
17
Y(s)
中国矿业大学信电学院
二、系统方框图的等效变换和化简
自动控制原理
补充结论:控制系统方块图简化的原则
1. 利用串联、并联和反馈的结论进行简化
2. 变成大闭环路套小闭环路 3. 解除交叉点(同类互移) 比较点移向比较点:比较点之间可以互移 引出点移向引出点:引出点之间可以互移 注:比较点和引出点之间不能互移
G(s) R(s) R(s) C(s)
R( s) R( s)G( s)
16
C (s) R(s)G(s)
autocumt@
1 R( s ) G( s)
中国矿业大学信电学院
二、系统方框图的等效变换和化简
(6)比较点之间互移
X(s) Y(s) Z(s) C(s) X(s) Z(s)
1 R2
I 2 (s)
U 2 (s)
U 3 (s)
U1 ( s )
1 I1 ( s ) R1
I 2 (s)
1 U 3 (s) sC1
1 R2
I 2 ( s) 1 U 2 (s) sC2
autocumt@
7
中国矿业大学信电学院
一、控制系统方框图的组成
建立方框图的步骤:
自动控制原理
autocumt@ 18
中国矿业大学信电学院
引出点移动
G1 G2
H2 G3 H3 H1 G4
H2
1 G4
G1
G2
H1
G3 a G4 H3
b
比较点移动
G3 G1
G2
错!
G2
H1
G3 G1
G1
向同类移动
G2
H1
G4 G1 H1 G1 G2
后移
作用分解
G3
前移
H3
G4 G2 G3
H1
H1
如何从复杂的方框图写出系统的传递函数来呢
G4 R(s) G1 G2 A G3 H2 H1
C
C(s)
-
-
B
autocumt@
9
中国矿业大学信电学院
二、系统方框图的等效变换和化简
自动控制原理
为了由系统的方块图方便地写出它的闭环传递函数,通常 需要对方块图进行等效变换。
方块图的等效变换必须遵守一个原则,即变换
一、控制系统方框图的组成
方框图(结构图)的四要素:
R( s)
G (s) C (s)
自动控制原理
R( s) +
R( s) C ( s)
c(t )
C (s) C (s)
r (t )
C (s)
R( s)
(d )
(a)
(b)
(c )
(1)方框(方块):表示输入到输出单向传输间 的函数关系。
r(t)
R (s) G (s)
1 I1 (s) I 2 (s) sC1
1 sC 1 I 2 ( s )
U 2 (s)
1 I1 (s) U1 (s) U 3 (s) R1
autocumt@ 5
中国矿业大学信电学院
一、控制系统方框图的组成
U 2 (s) 1 I 2 (s) sC2
U 3 (s)
X3 X1 X 1 -X 2 + X 3
-
R2 (s)
X2
X2
比较点示意图
(3)比较点(汇合点、综合点) 两个或两个以上的输入信号进行加减比较的元件。 “+”表示相加,“-”表示相减。“+”号可省略不写。 注意:进行相加减的量,必须具有相同的量纲。
autocumt@
3
中国矿业大学信电学院
一、控制系统方框图的组成
(4) 引出点(分支点、测量点) 表示信号测量或引出的位置
R (s) G1 (s) X (s) C (s ) G2 (s) X (s)
自动控制原理
特别要注意:同一位置 引出的信号大小和性质
完全一样。
分支点示意图
autocumt@
4
中国矿业大学信电学院
一、控制系统方框图的组成
H3
H3
二、系统方框图的等效变换和化简
自动控制原理
例2.21
用方框图的等效法则,求如图所示 系统的传递函数C(s)/R(s)
解:这是一个具有交叉反馈的多回路系统,如果不对它作 适当的变换,就难以应用串联、并联和反馈连接的等效变 换公式进行化简。本题的求解方法是把图中的点A先前移 至B点,化简后,再后移至C点,然后从内环到外环逐步 化简,其简化过程如下图。
建立环节的微分方程,要注意负载效应。在零初始条件下 求各环节的传递函数。若是电路系统,用 复阻抗表示,可直 接得到S域的代数方程,求传递函数更方便。 画出各个环节的函数方框。 按信号传输方向连接各函数方框。
autocumt@
8
中国矿业大学信电学院
一、控制系统方框图的组成
自动控制原理
H2
1 G5
23
autocumt@
中国矿业大学信电学院
二、系统方框图的等效变换和化简
G7
自动控制原理
G5 G2 G3 G4
R(s)
串联和并联
G1 G5
G6
G5 1 G5 H 2
C(s)
反馈
-
H1G2
H2
1 G5
G1G5 G1G6 1 G5 H 2 G1G5 G7 1 G1 H 1G2 1 G5 H 2 G1 H 1G2 1 G1G6 H 1G2 1 G5 1 G5 H 2
R(s) G(s) (b)
C(s)
特点:输入信号是相同的, 输出C(s)为各环节的输出之和. C ( s) C1 ( s) C2 ( s) C (s) G1 ( s) R( s) G2 ( s) R( s) R(s) G1 (s) G2 (s) G(s) [G1 ( s) G2 ( s)]R( s)
自动控制原理
(4)比较点的移动(前移、后移) “前移”、“后移”的定义:按信号流向定义,也即信 号从“前面”流向“后面”,而不是位置上的前后。
R(s) G(s) 比较点前移
+
C(s) Q(s)
R(s)
+
G(s)
C(s)
比较点后移 Q(s)
R(s)
+
G(s) C(s)
R(s) G(s)
+
C(s)
Q(s)
自动控制原理
ห้องสมุดไป่ตู้
C(s) Y(s)
(7)引出点之间互移
X(s)
a
b
C(s) Z(s)
X(s)
a
b
C(s) Y(s) C(s)
Y(s)
(8)比较点和引出点之间不能互移
X(s) Y(s) C(s) Z(S)=C(s)
Z(s) X(s)
X
autocumt@
Z (S ) C (S ) Z (S ) X (S )
G( s) Gi ( s)
i 1 n
n为相串联的环节数
结论:串联环节的等效传递函数等于所有传递函数的乘积。
autocumt@ 11
中国矿业大学信电学院
二、系统方框图的等效变换和化简
自动控制原理