智能车差速
edtc新型拖滞力矩控制功能

edtc新型拖滞力矩控制功能
EDTC是一种新型的拖滞力矩控制功能,它全称为Electric Differential Torque Control(电控差速器控制),是一种应用
在电动汽车或混合动力汽车上的技术。
EDTC的基本原理是通过电控差速器来实现对车轮间的驱动力
分配控制,以提高车辆的稳定性和驾驶性能。
传统的差速器是机械式的,不能实现主动的差速控制,而EDTC通过电子控
制单元(ECU)来对电动电机的输出进行精确控制,从而实现对差速器的控制。
EDTC的功能包括:
1. 拖滞控制:EDTC可以根据车辆的实际情况,智能地控制车
轮间的差速,使车轮在拖滞路面上能够提供更好的牵引力。
2. 动态转向:EDTC可以根据车辆的转向角度和转向速度,自
动调整车轮间的差速,以实现更稳定的转向控制。
3. 动力分配:EDTC可以根据车辆的运行状态和道路条件,智
能地分配驱动力,提高车辆的稳定性和操控性能。
4. 能量回收:在制动时,EDTC可以将一部分动能转化为电能,储存到电池中,提高能量利用效率。
EDTC的优点是可以根据不同的驾驶情况和路况,实现智能的
驱动力分配和差速调整,提高车辆的行驶稳定性和驾驶舒适性。
此外,EDTC还可以实现能量回收,提高车辆的能源利用效率。
基于MSP430单片机的智能小车控制系统设计

设计与分析◆Sheji yu Fenxi
电三极管,且将发射管和接收管集为一体,使探测器结构紧凑体,
易于单片机接口;RPR220 内置可见光过滤器可以减少散射光的影
响,不但检测可靠,而且无需另作遮光处理。
2.3 驱动模块
驱动模块主要功能:控制舵机输出转角,驱动小车加减速行
驶。此模块包括舵机驱动模块和电机驱动模块。
日以及小车行驶的速度和ຫໍສະໝຸດ 声波测距的结果。[9] 谭浩强.C 语言程序设计[M].第 2 版.清华大学出版社,2000
3 软件设计
智能小车系统软件设计核心部分包括:自主寻迹控制、超声波 测距和电机转速测量。系统软件设计采用 C 语言,程序是在 ADS1.2 集成开发环境下开发的。
收稿日期:2011-05-28 作者简介:魏声云(1989—),男,江西九江人,研究方向:电子信息 工程。
先根据被测物体的距离范围设定反射脉冲时间间隔,调整振荡器 触发时间。定时器提供触发电路和门电路的控制信号。图 5 为超声 波测距集成模块电路组成框图。
[参考文献] [1] 胡大可.MSP430 系列超低功耗 16 位单片机原理与应用[M].航空
航天大学出版社,2000
功放
40 kHz
定时器
被
[2] 唐磊,邱羽.基于 MSP430 步进电机控制器的设计[J].煤炭技术, 2011(30):50~51
GND
2
LM2596
+
D2
L2 C4
B2
R6
1
2
自主寻迹控制:通过 RPR220 读取道路信息,分析小车所处的 位置和方向,通过增量式 PID 控制算法调节小车的速度及转角,同 时通过电机的差速控制小车行进的转弯。使小车能够准确地寻迹 行驶。程序流程图如图 6 所示。
基于STC89C52单片机的循迹智能车控制系统设计
,
d i s t r i b u t e d i n f r o n t o f t h e i n t e l l i g e n t c a r h o r i z o n t a l l y . t h e s e n s o r s a r e u s e d f o r c o l l e c t i n g t h e i n f o r ma t i o n o f t h e r o a d t o r e a l i z e t h e
( 沈阳航空航 天大学 自 动化学院 , 辽宁 沈阳 1 1 0 0 0 0 )
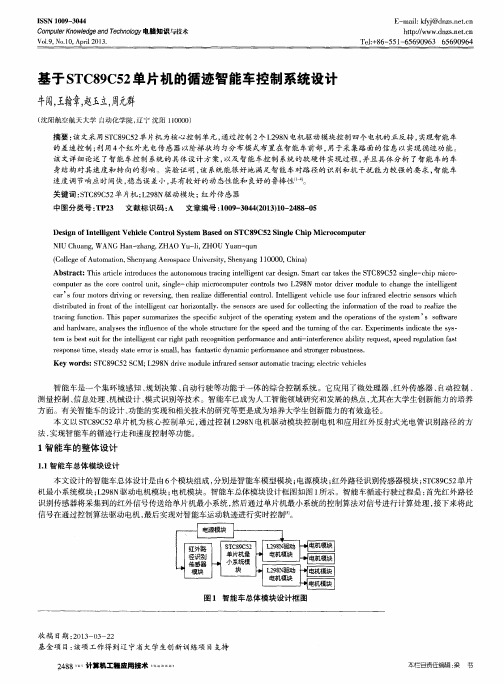
摘要 : 该文采 用S T C 8 9 C 5 2 单片机为核心控制单元 , 通过控制 2 个L 2 9 8 N电机驱动模块控 制四个电机 的正反转 , 实现 智能车 的差速控制 ; 利用4个红 外光 电传 感器以阶梯状 均匀分布模 式布置在智能车前部 , 用于采 集路 面的信 息以实现循迹 功能。 该文详 细论述 了智能车控 制 系统的具体设计 方案 , 以及智能 车控制 系统的软硬 件 实现过程 , 并且具体分析 了智能车 的车 身结构对其速度和转 向的影响。 实验证 明, 该 系统能很 好地 满足智 能车对路径 的识别和抗干扰能 力较 强的要 求, 智能 车
差速锁工作原理详细介绍
差速锁工作原理详细介绍
差速锁是车辆差速装置的一种,因为车辆在行驶过程中存在不同轮子需要具有不同的速度的情况,如果这种不同速度的情况没有得到控制,将会导致车辆的行驶受到严重影响,甚至会对车辆造成损坏,差速锁的作用就是控制车轮的旋转速度,确保车辆的正常行驶。
差速锁分为机械式差速锁和电子式差速锁两种,其中机械式差速锁包括限滑差动器和扭力差异器,而电子式差速锁则比较智能化,可以通过电脑来控制车轮的旋转速度。
机械式差速锁的原理是采用摩擦片或滑动板等物来限制差速,当车辆行驶过程中,如果有一个车轮被阻碍,另外一个车轮会迅速转动,并且力量会通过差速器进入到限滑差动器,这个时候差速锁通过制动盘和摩擦片来抵消这些力量,从而保持车轮的旋转速度一致。
机械式差速锁的好处在于它很适合在恶劣的路况下使用,比如泥泞地面或者被雪覆盖的路面,但是不利的一点就是它会导致车辆驾驶中出现颠簸和抖动现象。
电子式差速锁的原理则是利用电子芯片通过车辆的传感器进行判断,在发现车轮存在不同速度的情况下,通过计算旋转速度和车轮角度等信息来决定需要控制哪个车轮的旋转速度,最后再通过电机和差速装置的组合来控制车轮旋转速度的一致性。
电子式差速锁的好处在于它智能化程度更高,能够对路况变化作出快速反应,从而保持车辆的稳定性。
总之,差速锁的作用在于保证车轮旋转速度的一致性,在车辆驾驶中起到至关重要的作用。
基于智能车的后轮双电机差速的研究与应用
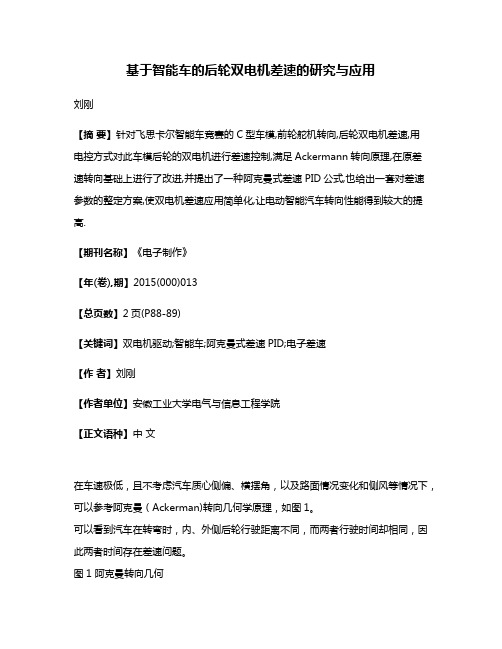
基于智能车的后轮双电机差速的研究与应用刘刚【摘要】针对飞思卡尔智能车竞赛的C型车模,前轮舵机转向,后轮双电机差速,用电控方式对此车模后轮的双电机进行差速控制,满足Ackermann转向原理,在原差速转向基础上进行了改进,并提出了一种阿克曼式差速PID公式,也给出一套对差速参数的整定方案,使双电机差速应用简单化,让电动智能汽车转向性能得到较大的提高.【期刊名称】《电子制作》【年(卷),期】2015(000)013【总页数】2页(P88-89)【关键词】双电机驱动;智能车;阿克曼式差速PID;电子差速【作者】刘刚【作者单位】安徽工业大学电气与信息工程学院【正文语种】中文在车速极低,且不考虑汽车质心侧偏、横摆角,以及路面情况变化和侧风等情况下,可以参考阿克曼(Ackerman)转向几何学原理,如图1。
可以看到汽车在转弯时,内、外侧后轮行驶距离不同,而两者行驶时间却相同,因此两者时间存在差速问题。
图1 阿克曼转向几何图2 MOS管驱动电路传统汽车使用机械差速器来完成差速,机械差速器的基本运动规律是:无论转弯或直行,两侧驱动车轮的转速之和始终等于差速器壳转速的2倍。
常用的对称式锥齿轮差速器,其内摩擦力矩很小,实际上可以认为无论左右驱动轮转速是否相等,两边扭矩总是平均分配,这样的分配比例对于车辆在良好路面上直行或转弯时,其运行状态都是满意的,但并不可人为自由调节达到最佳状态。
最近几年,世界各地都在研究电动汽车,而在电动汽车中,由于使用两台电机直接驱动后轮,不用安装机械差速器,但是在转弯时面临着差速问题。
因此如何解决电动汽车转弯时的差速问题,成为电动汽车发展的关键问题。
本文以智能车比赛C车模为基础,搭建双电机驱动,用kinetic系列单片机控制,让电子差速在理论与实践中的应用恰到好处。
1 双电机驱动电路的设计差速需要在低速与高速的不同行驶环境下才能看到效果,因此为了满足车速要求,所选驱动必须能承受大电流用以驱动不同的车速变化和正反转变化。
电子差速器工作原理

电子差速器工作原理电子差速器是一种通过电子控制来实现车辆差速功能的装置,它可以提高车辆的操控性能和稳定性。
在了解电子差速器的工作原理之前,我们先来了解一下传统机械差速器的工作原理。
传统机械差速器是一种通过齿轮组传动的装置,它的作用是在车辆转弯时,使内外两个车轮能够以不同的速度旋转,从而保持车辆的稳定性。
然而,传统机械差速器存在一个缺点,就是无法主动调节两个车轮的转速,当一侧车轮打滑时,另一侧车轮也会跟着打滑,影响车辆的操控性能。
而电子差速器则通过电子控制单元(ECU)来实现对车辆差速的精准控制。
它的工作原理主要包括以下几个方面:首先,电子差速器通过传感器实时监测车辆的转向角度、车速、转速等参数,将这些数据传输给ECU。
其次,ECU根据传感器获取的数据,通过算法计算出车辆当前的行驶状态,包括转弯半径、转向力矩等信息。
然后,ECU根据计算结果,通过控制车辆的制动系统或发动机输出,实现对车轮转速的精准控制,从而使车辆在转弯时能够保持稳定。
最后,当车辆转弯结束后,电子差速器会根据传感器获取的数据,自动恢复到正常差速状态,保证车辆在直线行驶时的正常性能。
电子差速器相比传统机械差速器具有以下优点:首先,电子差速器可以根据车辆的实际行驶状态进行实时调节,使车辆在转弯时更加稳定,提高了车辆的操控性能。
其次,电子差速器可以根据不同路况和行驶状态进行智能调节,提高了车辆的通过性和抓地力。
最后,电子差速器还可以通过软件升级来不断优化差速控制算法,使车辆的性能得到持续改进。
总的来说,电子差速器通过先进的电子控制技术,实现了对车辆差速的精准控制,从而提高了车辆的操控性能和稳定性。
随着汽车科技的不断发展,电子差速器将会在未来得到更广泛的应用,成为汽车动力传输系统的重要组成部分。
mlock机械锁差速器工作原理
mlock机械锁差速器工作原理一、mlock机械锁差速器的作用1. mlock机械锁差速器是一种用于汽车传动系统的差速器,其主要作用是在车辆行驶过程中,帮助车辆两侧轮胎之间的差速转动,从而保证车辆稳定行驶。
2. mlock机械锁差速器通过其内部的机械结构,能够在车辆转弯或遇到路面不平时,使两侧轮胎的差速转动保持一定的差速比,避免因一侧轮胎转速过快而导致另一侧轮胎打滑的情况。
3. mlock机械锁差速器的工作原理是通过一系列的齿轮和齿条传动以及一定的摩擦力来实现,其结构简单而有效。
二、mlock机械锁差速器的工作原理1. 齿轮传动机构mlock机械锁差速器内部通过一系列的齿轮传动机构来实现差速转动的作用。
当车辆转弯或遇到路面不平时,传动机构能够根据不同的转速和扭矩要求,实现轮胎之间的差速转动。
2. 齿条传动机构除了齿轮传动机构之外,mlock机械锁差速器还采用了齿条传动机构来辅助实现差速转动。
这种传动机构能够更加精准地控制两侧轮胎的差速转动比例,确保车辆在行驶过程中稳定性和平顺性。
3. 摩擦力控制在mlock机械锁差速器内部,还设置了一定的摩擦力控制装置,以确保车辆在转弯或遇到路面不平时能够灵活地调整差速转动比例,保证车辆行驶的稳定性和安全性。
三、mlock机械锁差速器的优势1. 结构简单可靠mlock机械锁差速器的内部机械结构设计简单、稳定可靠,鲁棒性强,能够在恶劣的路况下保持正常工作。
2. 成本低廉相比于电子式差速器,mlock机械锁差速器的制造成本较低,维护成本也相对较低,适用于一些价格敏感型的车辆。
3. 适应性强mlock机械锁差速器能够适应不同车型、不同驾驶环境下的需求,稳定性和可靠性表现突出。
四、总结mlock机械锁差速器作为汽车传动系统的重要组成部分,其在车辆行驶过程中起着至关重要的作用。
通过其内部简单而有效的机械结构,能够确保车辆在转弯或遇到路面不平时能够保持稳定的差速转动,避免轮胎打滑和转向不灵敏的情况发生。
电子差速器的工作原理
电子差速器的工作原理电子差速器是一种广泛运用于汽车技术中的装置,其主要功能是在车辆转弯时,通过控制车辆各个轮胎的转速,使得内外轮胎转速的差异保持在一个合适的范围内。
电子差速器的工作原理可以分为以下几个方面:1. 轮速传感器电子差速器的工作离不开轮速传感器。
车辆上通常会安装轮速传感器,用于检测每个轮胎的转速。
通过监测转速的变化,电子差速器可以判断车辆是否在转弯,并根据转动方向和速度的差异进行调整。
2. 差速器差速器是传动系统中非常重要的组成部分,它通过齿轮的协同工作实现动力分配和转向控制。
在普通的差速器中,内外轮胎转速差在转弯时会有明显的增加,导致车辆行驶不稳定。
而电子差速器通过调整差速器的工作状态,可以避免这种情况的发生。
3. 控制单元电子差速器的工作离不开一个智能控制单元。
控制单元通常由一部分电路和处理器组成,可以接收来自其他部件的信号,并根据预先设定的算法来进行计算和控制。
控制单元可以根据轮速传感器的反馈信号和车辆的转向状态,以及其他一些参数,进行差速器的控制。
4. 制动单元电子差速器中的制动单元是用来调整车辆转向时的差速的重要部分。
当车辆转弯时,制动单元可以根据传感器的信号判断内外轮胎的转速差异,并通过制动系统来调整转速差,保持车辆的稳定性。
制动单元通常会根据车辆的具体情况和转弯角度进行调整,以保证差速器的工作效果。
5. 性能调整电子差速器通常具有一些可调的参数,可以根据驾驶员的需求进行调整和优化。
例如,差速器的响应时间可以根据驾驶员的操作习惯进行设定,以达到最佳的驾驶体验。
同时,差速器的工作模式也可以根据不同道路条件进行调整,以应对多种驾驶环境。
总结起来,电子差速器通过轮速传感器监测车辆的转速情况,控制单元计算差速器的工作状态,并通过制动单元调整车辆的转向差速,从而实现车辆转弯时的稳定性控制。
它可以根据差速器的响应时间和工作模式的设定,提供更好的驾驶体验和安全性能。
电子差速器的发展将有助于提高汽车的操控性和行驶稳定性,对于提高驾驶员的驾驶体验和道路安全有着积极的促进作用。
差速器的分类
差速器的分类
差速器是一种能够使车辆左右车轮以不同的速度旋转的机械装置,其主要作用是通过转动车轮,使车辆能够顺利行驶在弯曲的道路、变化的地形等各种道路条件下。
根据差速器的工作原理以及安装位置的不同,常见的差速器可以分为以下几类:
1. 机械式差速器:机械式差速器采用了一组齿轮来实现左右车轮的差速控制。
它们通常安装在车辆的前部或后部,并由驱动轴连接。
2. 手动式差速器:手动式差速器需要手动操作,通过拉动杠杆来控制左右车轮的差速。
这种差速器通常使用在越野车辆上。
3. 自动式差速器:自动式差速器是一种智能化的差速器,它可以根据车速、转向角度以及车轮转速等参数来自动调整左右车轮的差速。
这种差速器通常使用在高档轿车、SUV等车型上。
4. 限滑差速器:限滑差速器是一种特殊的差速器,它可以在车辆通过弯曲或不平路面时减少打滑。
它的工作原理类似于自动式差速器,但具有更高的灵活性和响应速度。
以上是常见的差速器分类,不同的差速器适用于不同的车辆和路况,选择合适的差速器可以提高车辆的通过性、操控性和行驶安全性。
- 1 -。
基于红外光电传感器的智能车两轮差速转向模糊控制
检 测 到 导 引 带 传感 器 读 数 为 1 检测 到地 面 传 感 器读 数 为 0 , )
表 1 传 感 器 检 测 信 号 值
A CD 对应 十进制数 能否 出现 B 00 0O O 可能 出现 00 01 1 可能 出现 O 1 00 o l ol 0o lo 0 0 1l 0 l lO
a d r h p e s o h o moo sT e e p r na e ut h w h tt e t o wh ldf r n e s e d se r g ne l e t n i t s e d f t e t t r .h x e i t lr s l s o ta h g w me s w - e ie e c p t e i i l n n t i g
Ke wodsifa e s ns , t lge t v hi e, f en i t r y r : r r d e ori el n e cl dier t see i f z y c tol n n i al ng. z on r u
智 能 车设计 是 一 种 以汽 车 电 子 为背 景 , 盖 控制 、 涵 电子 电气 、 计算机、 机械 等多 学科 的科 技创 意 性设 计 。它 主要 由路 径 识别 、 速 度采集、 角度 控 制 及 车速 控 制等 功 能 模 块组 成 。 智 能小 车 要 实 现 的最 基 本 功 能 简单 的来 说 , 是 沿 着 固定 导 引 带 运 行 , 小 车 的 就 对 控制 主要 体 现 在 当小 车 相 对 于导 引 带发 生 偏 移 时 , 制 系 统 做 出 控 相应 的调 整 将 偏差 消 除 , 小 车运 行 方 向 与导 引 带保 持 一 致 。 如 使 果在 小 车在 没 有脱 离 导 引 带 的情 况 下可 以很 快 的将 偏 差 消 除 , 且 没有 较 大 的波 动 , 我们 就认 为 已 经达 到 了控 制 的要 求 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C车现在没有机械差速了,只能自己通过建模找到一个合适的建模公式来进行电子差速,我简单的查了一下资料,有个叫ackermann的模型,虽然是理想的,但简单的用在C车,效果还是很不错的,希望大家一起讨论,让今年的C车模绽放光彩~
假设B为后轮两轮的轮距,L为前后轮的间距,假如最优路径为左前方与车正前方夹角为α的直线(α有正有负),就是下图:
拐弯半径在左边和后轮齐平,转弯半径为R,那么后两个轮子的角速度相等,也就是后轮的w_left=w_right,那么
V_left/R_in=V_right/R_out=V/R(假设后轮中间的速度为V),而且R=L/tanα,R_in=R-B/2,R_out=R+B/2,
所以可以推出:
V_left=V*(1+B*tanα/2L);V_right=V*(1-B*tanα/2L);
这样就可以在程序里面把差速写上,V为根据黑线判断的速度,然后后两轮差速,如果觉得差速有点大,就可以乘上一个系数,觉得在弯道差速不够提前,就可以把括号里的1加大点。
temp = blick[ i ] - 43;
if( temp < 0) temp = -temp;
pwm23 = pwm23*( 1 - 1/3*( temp)/( end - 2) )
pwm65 = pwm65*( 1+1/3*( temp)/( end - 2) )
pwm23 = pwm23*( 1+1/3*( temp)/( end - 2) )
pwm65 = pwm65*( 1-1/3*( temp)/( end - 2) )。