船位误差最新题
《航海学》船舶定位课件2_7船位误差理论
g
g
u g dn n
Ⅰ′ Ⅰ end
退出
上海海事大学航海教研室制作
二、航海上常用位置线的梯度
1.方位位置线梯度
2.距离位置线梯度 3.方位差位置线梯度 4.距离差位置线梯度
上海海事大学航海教研室制作
退出
1.方位位置线梯度
(1)岸测船方位位置线梯度 (2)船测岸方位位置线梯度
l
n
L的意义:它不是真值,但确是真值的最可能值——称L为真 值的最概率值(最或然值、最或是值)
end
上海海事大学航海教研室制作 退出
二、单一观测的标准差m
1.理论计算公式
m
2i n
n
2 .实用计算公式——白塞尔公式
m
式中:
VV
n 1
vi li L
Hale Waihona Puke end上海海事大学航海教研室制作 退出
三、随机误差的传播规律
1 .函数标准差的一般式
问题:1)量面积误差?2)航向误差?即函数误差?如何求 设有函数 Z f ( x, y,, t )
其中
x , y , , t
为独立的直接观测量,它们的标准差分别为 则函数Z的标准差 mZ
2 2 Z
end
上海海事大学航海教研室制作 退出
极限误差
极限误差——3m 意义:1)从误差角度:观测中超过3m的误差只有0.3%。 2)从被观测量角度:被观测量的实际值落在“观测值±3m” 内的概率有99.7%。 例如:有人测量桌子长度为99.8±0.4cm 说明实际桌子长度在99.8±1.2cm(98.6~101cm)内的可能 性有99.7%
观测误差和船位误差(037-8)

x0 x 改正量
航海中的罗经差、陀罗差、指标差等均为改正量,而在习惯上 称其为误差,这在实际使用时要特别加以注意的。 如:TC=CC+△C SL=(L2-L1) ×(1+△L) TB=GB+△G
第二章 位置线和船位理论
方法误差:测量原理和方法本身存在 缺陷和偏差。 仪器误差:测量仪器、设备、装置导致
观测误差产生的原因
的测量误差,如六分仪的器差。
环境误差:测量环境、条件引起的测量误差, 如光线、气 温、气压等的变化。 人员误差:如照准偏差、读数误差
观测误差的分类
随机误差 系统误差 粗差
第二章 位置线和船位理论
随机误差: 又称偶然误差,它指在相同条件下,对同一量重复 (random 观测,产生的误差符号与其绝对值大小不确定。 error) 随机误差个别值无任何规律,但大量观测值呈现一 定的统计规律性。
第二章 位置线和船位理论
误差与精度:
误差与精度均可用以描述观测结果的可信赖程度。 误差:反映观测值偏离真值的程度; 精度:反映观测值接近真值的程度;
误差小,精度高;误差大,精度低。
随机误差的统计特征
正态分布
对称性 单峰性 有界性 抵偿性
绝对值相等的正负误差出现的次数相等
当测量次数足够多时,随机 误差算术平均值趋于0
计算含误差的航程S值为: 1200 cos41 Dep tgC 7.54709580 tgC 120 D C取82˚.5(含误差82.4522010642-82.5=-0.047798358) mS D (secC) mC C S=919.4 n mile(含误差) D cos2 C sin C mC S D / cosC 根据误差传播理论: D tgC / cosC mC 代入计算得误差: mS=120×tg82.4522010642/cos82.4522010642× -0.047798358 ×3.1415928/180=5.8 n mile 与计算得误差:919.4-913.6=5.8 n mile结果一致
三条船位线定位的船位误差
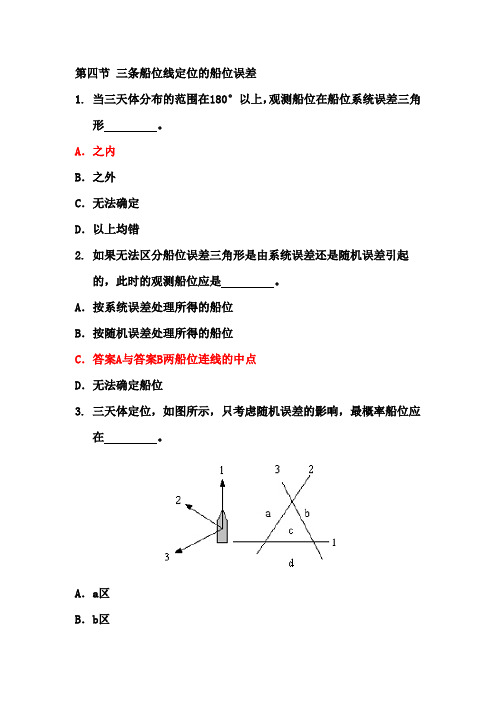
第四节三条船位线定位的船位误差1.当三天体分布的范围在180°以上,观测船位在船位系统误差三角形。
A.之内B.之外C.无法确定D.以上均错2.如果无法区分船位误差三角形是由系统误差还是随机误差引起的,此时的观测船位应是。
A.按系统误差处理所得的船位B.按随机误差处理所得的船位C.答案A与答案B两船位连线的中点D.无法确定船位3.三天体定位,如图所示,只考虑随机误差的影响,最概率船位应在。
A.a区B.b区D.d区4.三天体定位,因指标差的误差产生如图所示的船位误差三角形,船位应在。
A.内切圆的圆心B.外切圆的圆心C.旁切圆的圆心D.以上均错5.三天体定位,因指标差的误差产生如图1所示的船位误差三角形,船位应在。
A.a区B.b区D.d区6.观测三条船位线定位的优点是。
Ⅰ.可以发现粗差;Ⅱ.可以消除随机误差;Ⅲ.可以用一定的方法抵消船位系统误差;Ⅳ.可以减小随机误差对观测船位的影响。
A.Ⅰ,Ⅱ,ⅢB.Ⅱ,Ⅲ,ⅣC.Ⅰ,Ⅱ,Ⅲ,ⅣD.Ⅰ,Ⅲ,Ⅳ7.三星定位,经海图作业求得的观测船位。
A.可以消除随机误差的影响B.可以抵消系统误差的影响C.可以抵消粗差D.可以减小凑整误差8.最概率船位在船位误差三角形之内。
A.三条反中线的交点上B.靠近短边、大角C.到各边的距离与相应边长成比例D.以上均对9.三天体定位,如果三天体分布范围大于180°,并且船位误差三角形是由系统误差引起的,则消除了系统误差之后的观测船位应在。
A.误差三角形内切圆的圆心上B.误差三角形外切圆的圆心上C.误差三角形旁切圆的圆心上D.误差三角形内任意一点10.在等精度观测条件下,观测船位在船位随机误差三角形。
A.之内B.之外C.无法确定D.以上均错11.三方位定位得一船位误差三角形,将三方位同时增加4 ,得另一三角形,两三角形对应顶点连线的交点是消除了的船位。
A.系统误差B.随机误差D.标准差D.粗差12.当三天体分布的范围在180°以内(在同一侧),观测船位在船位系统误差三角形。
第四章位置线和船位理论(题库)
第四章位置线和船位理论(题库)01.在相同观测条件下,对某一固定量进行重复观测,出现绝对值大小和符号均不确定的误差称为:A. 粗差B. 固定误差C. 系统误差D. 随机误差02.由随机误差引起的船位误差三角形,其最概率船位在三角形的:A. 三边垂线的交点上B. 三条中线的交点上C. 三条角平分线的交点上D. 三条反中线的交点上03.一般可事先算出的误差或者可用适当的方法将其抵消的误差可认为是:A. 系统误差B. 随机误差C. 粗差D. 凑整误差04.可以用标准差作为衡量误差大小标准的误差,可以认为是:A. 系统误差B. 随机误差C. 粗差D. 凑整误差05.由于人为过失而产生的误差叫:A. 系统误差B. 随机误差C. 粗差D. 凑整误差06.在计算过程中,由于四舍五入所产生的误差称为:A. 系统误差B. 随机误差C. 粗差D. 凑整误差07.最概率船位在船位误差三角形之内的:A. 三条反中线的交点上B. 靠近短边、大角附近C. 距各边的距离与各边的长度成比例D. 以上都对08.相同条件下,对某一物标进行重复观测,对每次观测的信赖程度均相同,这样的观测称为:A. 直接观测B. 间接观测C. 等精度观测D. 非等精度观测09.相同条件下,对某一物标进行重复观测,对每次观测的信赖程度均不相同,这样的观测称为:A. 直接观测B. 间接观测C. 等精度观测D. 非等精度观测10.观测过程中所产生的误差是:A. 观测方位误差B. 观测仪器误差C. 观测环境误差和人员误差D. 以上都对11.在相同观测条件下,对某一物标进行重复观测,出现绝对值大小和符号均不变这样的误差称为:A. 粗差B. 固定误差C. 系统误差D. 随机误差12.可以将其抵消的误差称为:A. 粗差B. 固定误差C. 系统误差D. 随机误差13.已知TC = CC + V ar. + Dev .,CC的标准差σCC = 0o.5,Var的标准差σVar = 0o.3,Dev的标准差σDev = 0o.2,则TC的两倍标准差σTC 为:A. 0o.62B. 1o.23C. 1o.00D. 2 o.0014.锚泊船,用罗经对某一灯塔连续观测三次方位分别为:93o.5、95o.0、96o.5,每次观测的标准差σ= ±1o.0,则该灯塔的方位为:A. 95o.0 ±1o.0B. 95o.0 ±0o.6C. 96o.0 ±1o.0D. 93o.0 ±0o.615.转移船位线的误差包括:(①转移前船位线的误差②转移期间的推算误差③定位误差)A. ①②③B. ①②C. ①③D. ②③16.转移方位船位线的系统误差包括:(①方位船位线本身的系统误差②未考虑水流引起的转移方位船位线的系统误差③航迹推算的误差④转移船位线的标准差)A.①②③④B. ②③④C. ①②③D. ①②④17.为减小转移船位线的误差,应:A. 船位线与水流平行时进行观测B. 尽量缩短转移船位线的时间间隔C. 观测远物标D. 提高船速18.利用船位误差椭圆分析船位误差的优点是:A. 作图方便B. 计算简便C. 能直接反映船位误差的大小和方向D. 以上都对19.两条船位线垂直相交,每条船位线的标准差为±1',船位落在半径为1'的误差圆内的概率为:A. 63.2 % ~ 68.3 %B. 63.2 %C. 39.4 %D. 68.3 %20. 两条船位线垂直相交,每条船位线的标准差为±1',船位落在半径为1'.414的误差圆内的概率为:A. 63.2 % ~ 68.3 %B. 63.2 %C. 39.4 %D. 68.3 %21.对于球面方位位置线,以下说法正确的是:A. 岸测船为大圆弧B. 船测岸为恒位线C. 大圆弧与恒位线以恒向线为对称轴D. 以上都对22.关于位置线梯度的定义,下列说法正确的是:A.位置线梯度为一矢量,其方向与位置线法线方向一致,且指向观测值增大的方向B.梯度的模等于观测值在位置线法线上的导数C.当△u和△n均较小时,航海上通常采用近似公式g = △u / △n表述D.以上都对23.关于不同位置线梯度的模,下列表述正确的是:对于方位和距离位置线,D:船离物标的距离(海里);对于方位差位置线,d :两物标间的距离(海里);D 1、D 2:分别表示船离物标1和2的距离(海里);对于距离差位置线,γ:基线对船上测者的张角。
船舶定位题库27-0-8
船舶定位题库27-0-8问题:[单选]两方位定位时,关于物标的观测顺序,下列那个说法不正确()。
A.A.先测首尾方向的物标,后测正横方向的物标B.B.先测周期长的灯光,后测周期短的灯光C.C.先测弱光强光灯,后测强光灯D.D.先测定光灯,后测闪光灯问题:[单选]在大比例尺航用海图上所得的船位误差三角形每边都不超过()可以认为存在合理的随机误差。
A.A.2mmB.B.3mmC.C.5mmD.D.10mm问题:[单选]利用雷达进行方位定位时,若采用首向上显示方式,则用机械方位线量取得物标方位是()。
A.A.真方位B.B.相对方位C.C.罗方位D.D.点罗经方位(11选5 )问题:[单选]初到一陌生海岸,识别沿岸物标的基本方法是()。
A.A.利用对景图B.B.利用等高线C.C.利用已知船位识别D.D.以上都是问题:[单选]某船在沿岸航行中,只有一舷有物标可供定位,这种情况下利用三方位定位,应选择物标的夹角()最好。
A.A.30°B.B.60°C.C.90°D.D.120°问题:[单选]三方位定位时,位置线交角最佳值为()。
A.A.30°B.B.60°C.C.90°D.D.120°问题:[单选]夜间利用灯塔灯光进行方位定位时,应先测()。
A.A.闪光周期短,正横附近的灯塔B.B.闪光周期长,正横附近的灯塔C.C.闪光周期短,首尾线附近的灯塔D.D.闪光周期长,首尾线附近的灯塔问题:[单选]夜间用灯塔进行方位定位时,应先测()。
A.A.灯光强的灯塔B.B.距离近的灯塔C.C.闪光周期短的灯塔D.D.闪光周期长的灯塔。
两条船位线定位的船位误差
第三节两条船位线定位的船位误差1.两天体定位,用描述船位随机误差最好。
A.船位误差带B.船位误差四边形C.船位误差椭圆D.船位误差圆2.考虑到航迹推算误差和两条船位线的夹角这两方面因素对观测船位的影响,太阳移线定位要求太阳方位变化在。
A.15︒以内为好B.30︒~50︒为好C.50︒~70︒为好D.70︒~90︒为好3.两条方位船位线定位,两船位线交角取值范围为。
A.60︒~120︒B.30︒~60︒C.30︒~150︒D.60︒~90︒4.为提高两条方位船位线定位精度应考虑。
Ⅰ.两船位线交角趋近90︒;Ⅱ.先测正横附近的物标;Ⅲ.观测海图上有准确位置的近物标;Ⅳ.尽量缩短两次观测的时间间隔;Ⅴ.尽量减小观测误差。
A.Ⅰ,Ⅱ,Ⅲ,Ⅳ,ⅤB.Ⅰ,Ⅲ,Ⅳ,ⅤC.Ⅰ,Ⅱ,Ⅲ,ⅣD.Ⅱ,Ⅲ,Ⅳ,Ⅴ5.在等精度条件下,当两天体的方位差角大于90︒时,船位在过两船位线的交点所作的的方向上误差大。
A.两船位线交角的锐角角平分线B.两船位线交角的钝角角平分线C.两天体的平均方位线D.A或C6.在等精度条件下,只考虑随机误差,当两天体的方位差角小于90︒时,船位在过两船位线的交点所作的的方向上误差大。
A.两天体的平均方位线B.两船位线交角的锐角角平分线C.两天体的平均方位±90︒线D.B或C7.在等精度的条件下,当两天体的方位差角大于90°时,观测船位在的方向上误差大。
A.平均方位±90°B.平均方位C.天体D.±90°8.两天体定位,两天体的方位差角趋近最好。
A.180°B.120°C.90°D.0°9.在等精度条件下,只考虑随机误差的影响,天文船位在方向上误差大。
A.两条船位线交角的锐角角平分线B.两条船位线交角的钝角角平分线C.过两船位线的交点所作的两天体的方位线D.天体的方位线10.过两条天文船位线的交点所做的两天体的平均方位线可以认为是一条消除了的船位线。
船员考试-航海学
《航海学(二三副)》试题1、观测低高度天体方位求罗经差时,当推算船位误差不超过________,天体高度不超过35度时,天体计算方位可以代替天体真方位。
(36274:第八章罗经差的测定:3318)A.10分B.20分C.30分D.60分2、当天体的赤纬接近________,天体方位趋近________时,由推算船位的误差而引起的天体方位误差将趋近于零。
(36282:第八章罗经差的测定:3319)A.0度/10度B.90度/0度C.0度/90度D.180度/0度3、罗经面相对于真地平面的倾斜角θ对观测天体罗方位的误差影响是________ (36290:第八章罗经差的测定:3320)A.θ越大,误差越大B.θ越小,误差越大C.无影响D.影响不大4、在天测罗经中,当罗经的倾斜角一定时,所测天体的高度差越________,观测天体罗方位的误差越________ (36295:第八章罗经差的测定:3321)A.高/小B.低/大C.低/小D.以上均错5、在天测罗经差中,当被测天体的高度一定时,罗经面的倾斜角越________,观测天体罗方位的误差越________ (36300:第八章罗经差的测定:3322)A.大/小B.小/大C.小/小D.以上均错6、天体高度为30度,罗经面倾斜________度可引起观测方位最大产生0.6度的误差(36304:第八章罗经差的测定:3323)A.1度B.2度C.3度D.4度7、连续观察三次天体的罗方位取平均值后再求罗经差的目的是________ (36311:第八章罗经差的测定:3324)A.减少随机误差的影响B.抵消系统误差C.避免粗差D.A和C8、观测________方位求罗经差的计算方法最简单(36314:第八章罗经差的测定:3325)A.太阳低高度B.太阳视出没C.恒星低高度D.恒星真出没9、天测罗经差应该选用________天体(36317:第八章罗经差的测定:3326)A.一等星B.正东方天体C.低高度的航用天体D.高高度的航用天体10、在天测罗经差中,应尽量观测________的罗方位(36321:第八章罗经差的测定:3327)A.较亮天体B.低高度天体C.东西向天体D.南北向天体11、________是北纬低纬海区夜间测定罗经差的良好物标(36324:第八章罗经差的测定:3328)A.月亮B.金星C.一等星D.北极星12、观测低高度太阳方位求罗经差的原因是________ (36329:第八章罗经差的测定:3329)A.减少由于罗经面的倾斜而产生的观测太阳罗方位的误差B.减少由于推算船位的误差而产生的太阳真出没的误差C.此时太阳方位变化较慢,则观测误差较小D.以上均对13、观测低高度天体的罗方位求罗经差可以________ (36333:第八章罗经差的测定:3330)A.减少由于罗经面的倾斜而产生的观测天体罗方位的误差B.减少由于推算船位的误差而产生的天体真方位的误差C.A和B都对D.A和B都不对14、观测低高度太阳方位求罗经差时,应先把查表求得的太阳方位由半圆周法换算为________ (36336:第八章罗经差的测定:3331)A.圆周法B.倍角法C.象限法D.以上均错15、《太阳方位表》英文版的名称是________ (36339:第八章罗经差的测定:3332)A.Dabis’s TabiesB.Burdwood’s TabiesC.Azimuth TabiesD.A和B16、观测低高度太阳方位求罗经差,《太阳方位表》的查表引数是________ (36343:第八章罗经差的测定:3333)A.纬度,赤纬,视时B.纬度,赤纬,世界时C.纬度,赤纬,平时D.纬度,半圆地方时角,赤纬17、利用《太阳方位表》求罗经差,如果北纬测者下午进行观测,从表中查得的太阳方位命名为________ (36347:第八章罗经差的测定:3334)A.NEB.NWC.SED.SW18、利用《太阳方位表》求罗经差,当________测者________进行观测时,从表中查得的太阳方位命名为NW (36351:第八章罗经差的测定:3335)A.北纬/上午B.北纬/下午C.南纬/上午D.南纬/下午19、船舶在中国沿海航行,上午利用《太阳方位表》求得的半圆方位的名称是________ (36354:第八章罗经差的测定:3336)A.NEB.NWC.SEB.北纬/下午D.SW20、船舶在中国沿海航行,下午利用《太阳方位表》求得的半圆方位的名称是________。
海船船员考试:船舶定位题库一
海船船员考试:船舶定位题库一1、单项选择题(江南博哥)请问方位定位时,应先测()。
A.接近首尾线的物标B.正横附近的物标C.孤立、平坦的物标D.远处、显著的物标答案:A2、单项选择题若航向误差为1,当航行50nmile后船位偏移量为()。
A.0.87nmileB.1.7nmileC.7/2nmileD.3/4nmile答案:A3、单项选择题某船在航行中用六分仪观测未知高度的物标垂直角α=1º.5,用雷达测得船与物标的水平距离是10nmile,则未知物标的高度应为()。
A.485(m)B.501(m)C.295(m)D.300(m)答案:A4、单项选择题两陆标方位定位时,应先测方位变化慢的物标,后测方位变化快的物标,它是建立在()。
A.观测的难、易程度B.定位时间是以第一次观测时刻为准C.定位时间是以第二次观测时刻为准D.与观测方位时刻无关答案:C5、单项选择题当发现船位差较大时,以下()做法正确。
A.将继续推算的起始点转移至观测船位B.分析查明原因后,按原推算船位继续进行推算。
C.报经船长同意后,将继续推算的起始点转移至观测船位D.以上做法均对,怎样做视航区而定。
答案:C6、单项选择题向正东,受北风、南流影响,则风压差α和流压差β为()。
A.α>0,β>0B.α<0,β<0C.α>0,β<0D.α<0,β>0答案:A7、单项选择题某轮罗航向045°,罗经差2°E,南风7级,风压差取7°,则某右舷物标最近时的罗方位是()。
A.142°B.144°C.128°D.130°答案:C8、单项选择题某轮沿某叠标线航行,叠标方位为030°,罗经航向030°,磁差1°W,自差2°W,则实测风流压差为()。
A.-3°B.+3°C.0°D.无法确定答案:B9、单项选择题在三方位定位中,船位误差三角形主要是由罗经差的误差引起的,消除了该误差后的观测船位位于误差三角形的()。
船舶建造精度管理与误差控制考核试卷
C.误差量级的叠加
D.独立工序的随机误差
19.以下哪些技术进步有助于提高船舶建造精度?()
A. 3D打印技术
B.机器人自动化技术
C.大数据与云计算技术
D.传统手工制作技术
20.以下哪些管理措施有助于提升船舶建造精度控制的效果?()
A.实施严格的质量管理体系
B.加强生产过程中的质量控制
D.软件模拟优化
11.信息化管理在船舶建造精度控制中的作用主要包括哪些?()
A.提高数据处理速度
B.降低人为错误
C.实现数据的实时监控
D.减少生产成本
12.以下哪些条件是船舶建造精度控制中必须考虑的?()
A.设计公差
B.材料的收缩率
C.环境湿度
D.工人的工作时长
13.以下哪些工具或设备常用于船舶建造中的精度测量?()
B.加工精度控制
C.装配精度控制
D.人力资源管理
2.在船舶建造中,误差控制的首要步骤是?()
A.误差分析
B.误差测量
C.误差预防
D.误差修正
3.下列哪个因素不会影响船舶建造的精度?()
A.材料性能
B.加工设备
C.环境温度
D.员工经验
4.在船舶设计阶段,以下哪种方法不常用于精度控制?()
A.计算机辅助设计
A.公差越小,制造难度越大
B.公差越大,装配精度越高
C.公差与加工精度无关
D.公差只与设计阶段有关
8.在船舶建造中,以下哪种误差属于系统误差?()
A.随机误差
B.环境误差
C.人为误差
D.设备误差
9.以下哪个不是船舶建造误差控制的基本原则?()
A.预防为主,防治结合
船舶定位试题及答案
船舶定位试题及答案一、单选题(每题2分,共10分)1. 船舶定位中常用的定位系统不包括以下哪一项?A. GPSB. GLONASSC. BeiDouD. Radar答案:D2. 船舶定位系统GPS的全称是什么?A. Global Positioning SystemB. Global Positioning SatelliteC. Global Positioning SystemD. Global Positioning Service答案:A3. 船舶定位中,纬度和经度的度量单位是什么?A. 米B. 公里C. 度D. 海里答案:C4. 船舶定位时,如果船舶在赤道上,那么其纬度是多少?A. 0°B. 90°C. -90°D. 180°答案:A5. 船舶定位时,如果船舶在南极点,那么其经度是多少?A. 0°B. 90°C. -90°D. 180°答案:A二、填空题(每题2分,共10分)1. 船舶定位时,GPS接收器至少需要接收到______颗卫星的信号才能进行定位。
答案:42. 船舶定位中,经度的范围是从______度到______度。
答案:-180°,180°3. 在船舶定位中,纬度的范围是从______度到______度。
答案:-90°,90°4. 船舶定位系统GLONASS是由______国家开发的。
答案:俄罗斯5. 船舶定位系统BeiDou是由______国家开发的。
答案:中国三、判断题(每题2分,共10分)1. 船舶定位系统只能用于确定船舶在海上的位置。
()答案:错误2. GPS系统是由美国国防部开发的。
()答案:正确3. 船舶定位时,经度和纬度的数值越大,表示船舶离赤道越远。
()答案:错误4. 船舶定位系统BeiDou只在中国境内使用。
()答案:错误5. 船舶定位系统GLONASS的卫星数量少于GPS系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船位误差最新题————————————————————————————————作者:————————————————————————————————日期:2船位误差一、观测误差1969.在相同观测条件下,对某一固定量进行重复观测,出现绝对值大小和符号均不确定的误差称为。
A.粗差 B.固定误差 C.系统误差 D.随机误差参考答案: D1970.当测者眼高为9米时,若有1米误差,可引起眼高差的误差为。
A.1′.0 B.0′.6 C.0′.3 D.0′.1参考答案:C1971.一般可事先算出的误差或者可用适当的方法将其抵消的误差可认为是。
A.系统误差 B.随机误差 C.粗差 D.凑整误差参考答案:A1972.可以用标准差作为衡量误差大小的标准,该误差可以认为是。
A.系统误差 B.随机误差 C.粗差 D.凑整误差参考答案:B1973.由于人为的过失而产生的误差称为。
A.系统误差 B.随机误差 C.粗差 D.凑整误差参考答案:C1974.在计算过程中,由于四舍五入所产生的误差称为。
A.系统误差 B.过失误差 C.粗差 D.凑整误差参考答案:D1975.在相同条件下,对某一物标进行重复观测,对每次观测的信赖程度均相同,这样的观测称为。
A.直接观测 B.间接观测C.等精度直接观测 D.非等精度直接观测参考答案:C1976.在相同条件下,对某一物标进行重复观测,对每次观测的信赖程度均不相同,这样的观测称为。
A.直接观测 B.间接观测C.等精度直接观测 D.非等精度直接观测参考答案:D1977.观测过程中所产生的误差是。
A.观测方法误差 B.观测仪器误差C.观测环境误差和人员误差 D.以上全对参考答案:D1978.处理观测数据时所产生的误差是。
3 / 21A.有效数字凑整误差 B.近似计算的误差C.利用参数、常数所产生的误差 D.以上全对参考答案:D1979.在相同条件下,对同一物标进行重复观测,所产生的误差绝对值的大小和符号均不确定,就误差的个体而言不服从任何规律,就误差的总体而言,服从统计上的规律,这样的误差称为。
A.系统误差 B.随机误差 C.粗差 D.以上均错参考答案:B1980.在不相同条件下,对同一物标进行重复观测,所产生的误差绝对值的大小和符号均不变,这样的误差称为。
A.系统误差 B.随机误差 C.粗差 D.以上均错参考答案:A1981.可以将其抵消的误差称为。
A.系统误差 B.随机误差 C.粗差 D.标准差参考答案:A1982.在一般情况下,系统误差。
A.不可以抵消 B.可以抵消C.可以事先算出并将其消除 D.B和C参考答案:D1983.可以作为衡量随机误差的标准。
A.系统误差 B.标准差 C.粗差 D.凑整误差参考答案:B1984.真实船位落在2倍标准船位误差带内的概率是。
A.68.3% B.95.4% C.99.7% D.100%参考答案:B1985.真实船位落在3倍标准船位误差带内的概率是。
A.68.3% B.95.4% C.99.7% D.100%参考答案:C1986.用罗经测得某物标方位为126︒.0,标准差为±1︒.0,如果观测结果为126︒.0±1︒.0,真方位落在该结果内的概率是。
A.68.3% B.95.4% C.99.7% D.100%参考答案:A1987.用罗经测得某物标方位为126︒.0,标准差为±1︒.0,如果观测结果为126︒.0±2︒.0,真方位落在该结果内的概率是。
A.68.3% B.95.4% C.99.7% D.100%参考答案:B1988.用罗经测得某物标方位为126︒.0,标准差为±1︒.0,如果观测结果=126︒.0±3︒.0,真方位落在该结果内的概率是。
4 / 21A.68.3% B.95.4% C.99.7% D.100%参考答案:C1989.观测高度的标准差σ=±1'0,计算高度的标准差σ=±1'0,对某一高度观测了3次,高度差的标准差σDh= 。
A.±1'.15 B.±1'.41 C.±1'.73 D.±1'.0参考答案:A1990.船位落在标准差带内的概率为。
A.68.3% B.95.4% C.99.7% D.100%参考答案:A1991.观测高度的标准差σ=±1'0,计算高度的标准差σ=±1'0,对某一高度观测了3次,高度差的2倍标准差σDh= 。
A.±1'.15 B.±0'.81 C.±2'.31 D.±1'.0参考答案:C1992.已知真航向TC=罗航向CC+磁差Var+自差Dev,罗航向的标准差σCC=±0°.5,磁差的标准差σVar=±0°.3,自差的标准差σDev=±0°.2,真航向的标准差σTC=。
A.±0°.62 B.±1°.23 C.±1°.0 D.±2°.0参考答案:A1993.已知真航向TC=罗航向CC+磁差Var+自差Dev,罗航向的标准差σCC=±0°.5,磁差的标准差σVar=±0°.3,自差的标准差σDev=±0°.2,真航向的2倍标准差σTC=。
A.±0°.62 B.±1°.23 C.±1°.0 D.±2°.0参考答案:B1994.观测高度的标准差σ=±1'0,计算高度的标准差σ=±1'0,对某一高度观测了三次,高度差的标准差σDh= 。
A.±1'.15 B.±1'.41 C.±1'.73 D.±1'.0参考答案:A1995.已知真航向TC=陀罗航向GC+陀螺差△G,陀罗航向的标准差σGC=±0°.3,陀螺差的标准差σ△G=±0°.7,真航向的2倍标准差σTC=。
A.±1°.0 B.±2°.0 C.±0°.76 D.±1°.52参考答案:D1996.已知真方位TB=罗方位CB+磁差Var+自差Dev,罗方位的标准差σCB=±0°.5,磁差的标准差σVar=±0°.5,自差的标准差σDev=±0°.5,真方位的标准差σTB=。
A.±0°.5 B.±1°.5 C.±0°.87 D.±1°.73参考答案:C1997.已知真方位TB=罗方位CB+磁差Var+自差Dev,罗方位的标准差σCB=±0°.5,磁差的标准差σVar=±0°.5,自差的标准差σDev=±0°.5,真方位的2倍标准差5 / 21σTB=。
A.±0°.5 B.±1°.5 C.±0°.87 D.±1°.73参考答案:D1998.已知真航向TC=陀罗航向GC+陀螺差G,陀罗航向的标准差σGC=±0°.3,陀螺差的标准差σG=±0°.7,真航向的标准差σTC=。
A.±1°.0 B.±2°.0 C.±0°.76 D.±1°.52参考答案:C1999.锚泊船,用罗经对某一灯塔连续观测三次方位分别是93︒.5、95︒.0、96︒.5,每次观测的标准差σ=±1︒.0,该灯塔的方位为。
A.95︒.0±1︒.0 B.95︒.0±0︒.6 C.96︒.0±1︒.0 D.93︒.0±0︒.6参考答案:B2000.观测某物标的罗方位为130︒.5,则该方位的最大凑整误差为。
A.±0︒.5 B.±0︒.05 C.±0︒.3 D.±0︒.03参考答案:B2001.观测某物标的罗方位为231︒.5,则该方位的凑整标准差为 _。
A.±0︒.5 B.±0︒.05 C.±0︒.3 D.±0︒.03参考答案:D2002.观测某物标的罗方位为100︒,则该方位的凑整标准差为。
A.±0︒.5 B.±0︒.05 C.±0︒.3 D.±0︒.03参考答案:C2003.利用误差椭圆分析船位误差的优点是。
A.作图方便 B.计算简便C.能直观地看出船位误差的大小和方向 D.以上均对参考答案:C2004.两条船位线垂直相交,每条船位线的标准差为±1′,船位落在半径为1′的圆内的概率为。
A.68.3%~63.2% B.63.2% C.39.4% D.68.3%参考答案:C2005.两条船位线垂直相交,每条船位线的标准差为±1′,船位落在半径为1′.414的圆内的概率为。
A.68.3%~63.2% B.63.2% C.39.4% D.68.3%参考答案:B2006.两条船位线相交,每条船位线的标准差为±1',船位落在标准船位误差圆内的概率为。
A.68.3%~63.2% B.63.2% C.39.4% D.68.3%参考答案:A2007.两条船位线相交,每条船位线的标准差为±1',船位落在标准船位误差椭圆内的概率为。
6 / 21A.68.3%~63.2% B.63.2% C.39.4% D.68.3%参考答案:C2008.在等精度条件下两条船位线的交角比较小,或者在非等精度条件下两条船位线的标准差相差较大,利用描述船位误差较为有利。
A.船位误差圆 B.船位误差椭圆C.船位误差四边形 D.以上均错参考答案:C2009.凑整误差属于。
A.系统误差 B.随机误差 C.粗差 D.A和B参考答案:B2010.利用船位误差椭圆描述船位误差的主要优点是。
A.计算船位误差方便 B.作图简单C.能显示船位误差的大小和方向 D.非等概率密度曲线参考答案:C2011.在天文定位中,下列哪些误差属于系统误差。
Ⅰ.高度观测误差;Ⅱ.眼高差;Ⅲ.蒙气差;Ⅳ.指标差;Ⅴ.假水天线。
A.Ⅰ~Ⅴ B.Ⅱ~Ⅴ C.Ⅰ~Ⅳ D.Ⅱ~Ⅳ参考答案:B2012.推算航程的误差主要来自于。