基于单片机自动车库门的设计
基于单片机的家用自动车库的设计开题报告
[7].王秀俊.基于51单片机温度传感器DS18B20的应用[J].农业装备技术,2013,02:29-31.
[8].张福学编著《实用传感器手册》[M].电子工业出版社1988年.
[9] .曲波肖圣兵吕建平编著《工业常用传感器选型指南》[M].清华大学出版社2002.
[10].彭伟.《单片机C语言程序设计实训100例》[M].电子工业出版社.2012年.
[11].温宗周.《单片机原理及接口技术》.中国电力出版社[M].2009年
[12].Fan Xu,On Designing High-Performance Signal Processing Algorithms.for a Ring-Structured Multiprocessor, Mich.: UMI,2002:12~15.
经济的全球化、汽车的产业化带领我们步入了汽车时代,市民在享受汽车为出行提供便利的同时,也在承受着停车难带来的烦恼。由于我们国内各大中城市汽车数量增长迅速、城市规划建设跟不上汽车发展步伐,导致了交通拥堵、停车难等一系列社会问题,并且各大中城市停车位数目与机动车的数目做不到数目上一比一的增长,车多位少这一难题不易快速解决。我们亟待解决的问题是车库内停车安全以及车库内安全的问题,车库内部智能化的设计,希望帮助方向感不强的人和新手司机能够安全的停车,同时保障人们的人身财产安全。
一、选题的目的、意义和研究现状
本次设计的总体目标是设一个现代家用汽车的智能化车库,首先对车库各部分的功能模块进行设计,最后通过单片机实现总体的控制,形成一个智能车库。智能车库是智能家居的一个重要组成部分,从现今的智能家居来说,如果一个别墅少了一个智能车库就好像一副美丽的画像烧化了眼神一样。可见智能车库在今天智能家居中所处的重要地位。智能车库的总体部分包括建筑部分,车库门部分和车辆检测维护系统,而他们三部分又是相互联系的本次设计所选的是为家用汽车的智能车库,所以为小型的家庭智能车库,而并非是大型车库,使用立体式的控制。由于是家庭型车库,所以智能车库体现出来的功能为贴心,实用,便捷。随着人民生活水平的不断提高,随着人民生活水平的不断提高,迅速发展智能化楼宇已是房地产发展的必然趋势,同时随着人们安全防范意识的逐渐增强,对居住环境的要求也越来越高。因此房地产业由量向质的转变也是大势所趋,所以,生态,环保,健康,节能,智能的设计将受到广大房地产开发商和消费者的青睐。设计所采用的智能车库控制器也需要单片机系统控制的机电一体化产品。整个系统应用微电脑,好精度的进行多级分段扫描和受力分析。
基于单片机的智能车库管理系统设计
(2)车辆信息登记模块:通过串口通信连接至单片机,将车主及车辆信息 存储在数据库中。
(3)车位管理模块:利用红外线传感器监测车位的占用情况,并将信息传 送至单片机。
(4)车辆进出控制模块:通过识别车辆信息,控制道闸开关的升降,实现 车辆的进出控制。
(5)安全监控模块:采用视频监控系统,实时监测车库内的异常情况,发 现异常时触发报警装置。
1、具体步骤 (1)搭建硬件平台:根据电路设计图搭建硬件平台,调试各 模块的工作状态。 (2)编写软件程序:基于C语言编写软件程序,实现各功能 模块的逻辑。 (3)系统测试与优化:通过实际场景测试,发现并解决存在的问 题,对系统进行优化。2.难点分析 (1)串口通信不稳定:受外部干扰因素的影 响,串口通信可能会出现数据传输错误或丢失的情况。
为了解决这一问题,可以增加数据校验和重发机制,确保数据的准确传输。 (2)A/D转换精度不足:受硬件限制,A/D转换的精度可能无法满足实际需求。 为了提高精度,可以采用软件算法对数据进行修正和补偿。(3)实时性要求高: 系统需要实时监测车库内的情况,并对异常事件进行快速响应为了提高实时性, 可以采用定时器中断的方式,定期采集数据并处理异常事件。
谢谢观看
基于单片机的智能车库管理系统设 计
目录
01 一Байду номын сангаас引言
03 三、系统设计
02 二、需求分析
一、引言
随着社会的进步和科技的发展,智能化管理已经成为了各个领域的必然趋势。 车库作为现代城市居民生活中不可或缺的一部分,其管理同样需要与时俱进。传 统的手动管理模式存在着诸多弊端,如效率低下、错误率高等,因此设计一种基 于单片机的智能车库管理系统势在必行。本次演示旨在探讨如何设计一种基于单 片机的智能车库管理系统,以实现车库的高效、便捷、安全、节能管理。
基于单片机的智能停车系统设计与实现
基于单片机的智能停车系统设计与实现智能停车系统是现代城市交通管理中的重要组成部分,它通过利用技术手段提高停车场的使用效率和用户的体验,有效缓解交通拥堵和停车难问题。
基于单片机的智能停车系统设计与实现可以更好地满足用户的需求,提供便捷的停车服务和智能的管理功能。
一、系统设计与实现目标基于单片机的智能停车系统设计与实现的主要目标是提供以下功能:1. 车位检测与管理:通过车位检测器实时监测停车场内各个车位的使用情况,并将检测结果传输到主控单片机,实现车位的动态管理和分配。
2. 车辆识别与记录:利用车牌识别技术,对驶入停车场的车辆进行自动识别和记录,实现车辆的身份预判和进出记录。
3. 智能导航与引导:通过在停车场内设置导航屏幕或提供手机应用,实现车辆的智能导航和停车位的引导,提升用户的停车体验。
4. 支付与结算:用户可以通过系统提供的支付平台,完成停车费用的支付和结算,实现无现金停车,提高交易的便捷性和安全性。
5. 数据分析与统计:系统能够对停车场的使用情况进行数据分析和统计,实现通过数据驱动的停车管理与优化,为城市交通管理部门提供参考依据。
二、系统组成与工作流程基于单片机的智能停车系统通常由以下组件组成:1. 车位检测器:通过红外线、超声波或压力传感器等技术手段,实时感知车位的占用情况,并将信息传输给主控单片机。
2. 主控单片机:接收车位检测器传输过来的车位信息,对车位进行管理和分配,与其他模块进行数据交互和控制。
3. 车牌识别模块:利用图像处理和识别算法,对车辆的车牌进行识别,提取关键信息供系统使用。
4. 导航与引导模块:通过屏幕显示或手机应用,提供车辆的智能导航和停车位的实时引导,使用户能够快速找到空闲车位。
5. 支付与结算模块:用户通过系统提供的支付平台,完成停车费用的支付和结算。
6. 数据分析与统计模块:对停车场的使用情况进行数据统计和分析,生成报表供交通管理部门参考。
系统的工作流程如下:首先,车位检测器实时感知车位的占用情况,并将信息传输给主控单片机。
基于单片机的车库门遥控器的设计
1 无 线 遥 控 系 统
同一 类产 品的红外线遥 控器 ,即使有相同的遥
控 编 码 或 频 率 ,也 不 会 出 现遥 控 信号 穿 墙遥 控
现 在 中小 型 电 器 ,例 如 家 用 电 器 的 遥 控 别 的 电器 的情 况 ,这 对 于 遥 控 器 的 大 批 量 生 产 方 法 都 是 无 线 遥 控 的 ,主 要 有 红 外 线 遥 控 和 无 以及 在 家 用 电器 上 普 及 红外 线 遥 控 器 提 供 了极 大 的 方 便 ;此 外 ,因 为 红 外 线 是一 种 不 可 见 光 , 所 以 对 环 境 影 响 非 常 小 , 同时 它 又具 有 很 强 的
而且它 的工作 电压 低、功耗小、外围电路也非
常 简 单 ,所 以 红 外遥 控 器 在 生 活 中 的应 用 也 是 越来越被人们认知。
< <上 接 6 8页
才 能进 行 准 确 的 控 制 ,所 以我 们 在 AD 上 花 了
机速度 P WM 值 ),最后将这些控 制信 号 ,通 过调 用 s u d u函数 控制 电机 ( 即速度 )通过调
A u t o ma t i c C o n t r o l ● 自动化控制
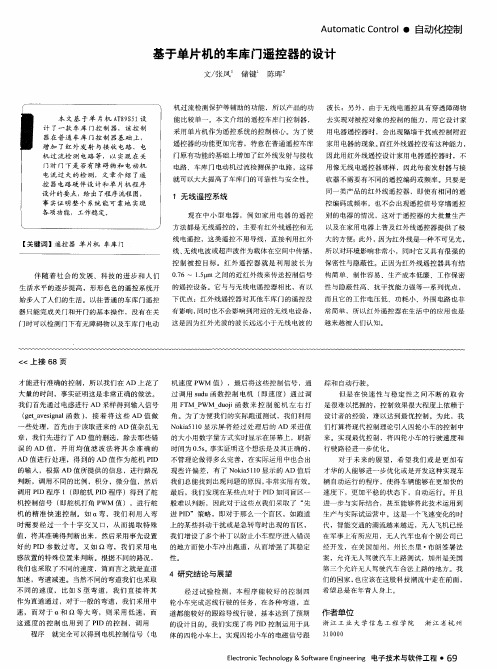
基于单片机 的车库 门遥控器的设计
文/ 张 风 储 键 陈 晖
机 过 流 检 测 保 护 等 辅 助 的 功 能 ,所 以产 品 的功 本 文基 于单 片机 A T 8 9 S 5 1 设 计 了 一 款 车 库 门控 制 器 , 该 控 制
波 长 ; 另 外 , 由 于 无 线 电遥 控 具 有 穿 透 障 碍 物 去 实 现对 被 控对 象 的控 制 的 能 力 ,用 它 设 计 家
能比较单一。本文介绍的遥控车库 门控制器 , 采用 单片机 作为遥 控系统的控制核心 。为 了使 遥控器 的功 能更加 完善 ,特意在普通遥控车库
基于单片机的自动车库门设计
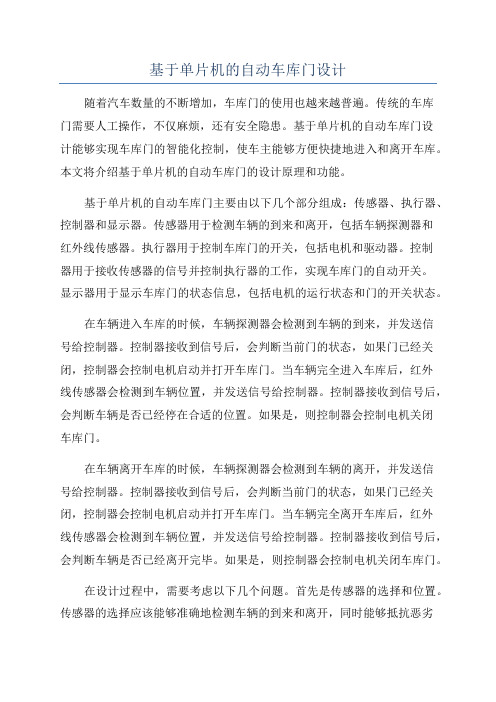
基于单片机的自动车库门设计随着汽车数量的不断增加,车库门的使用也越来越普遍。
传统的车库门需要人工操作,不仅麻烦,还有安全隐患。
基于单片机的自动车库门设计能够实现车库门的智能化控制,使车主能够方便快捷地进入和离开车库。
本文将介绍基于单片机的自动车库门的设计原理和功能。
基于单片机的自动车库门主要由以下几个部分组成:传感器、执行器、控制器和显示器。
传感器用于检测车辆的到来和离开,包括车辆探测器和红外线传感器。
执行器用于控制车库门的开关,包括电机和驱动器。
控制器用于接收传感器的信号并控制执行器的工作,实现车库门的自动开关。
显示器用于显示车库门的状态信息,包括电机的运行状态和门的开关状态。
在车辆进入车库的时候,车辆探测器会检测到车辆的到来,并发送信号给控制器。
控制器接收到信号后,会判断当前门的状态,如果门已经关闭,控制器会控制电机启动并打开车库门。
当车辆完全进入车库后,红外线传感器会检测到车辆位置,并发送信号给控制器。
控制器接收到信号后,会判断车辆是否已经停在合适的位置。
如果是,则控制器会控制电机关闭车库门。
在车辆离开车库的时候,车辆探测器会检测到车辆的离开,并发送信号给控制器。
控制器接收到信号后,会判断当前门的状态,如果门已经关闭,控制器会控制电机启动并打开车库门。
当车辆完全离开车库后,红外线传感器会检测到车辆位置,并发送信号给控制器。
控制器接收到信号后,会判断车辆是否已经离开完毕。
如果是,则控制器会控制电机关闭车库门。
在设计过程中,需要考虑以下几个问题。
首先是传感器的选择和位置。
传感器的选择应该能够准确地检测车辆的到来和离开,同时能够抵抗恶劣的环境条件。
传感器的位置应该离车辆进入和离开的位置足够近,可以准确地检测到车辆的到来和离开。
其次是执行器的选择和控制。
执行器的选择应该能够满足车库门的开关需求,并具有足够的承载能力。
执行器的控制应该能够根据传感器的信号进行自动控制,并具有足够的安全保护功能。
最后是控制器的设计和编程。
基于单片机智能停车场的设计程序

车位诱导程序:(1)系统初始化:一般情况,直接调用此函数将单片机系统时钟设置在72MHzSystemInit();程序中经常要用到延时函数,在这里为了提高CPU工作效率,不再使用死等待的演示方式,而是采用定时器作延时。
void Delay_Configuration(u8 SYSCLK){RCC_APB1PeriphClockCmd(Delay_RCC_APB1Periph_TIMx, ENABLE);TIM_PrescalerConfig(Delay_TIMx, SYSCLK, TIM_PSCReloadMode_Update);}(2)超声波检测模块初始化//超声波软件系统初始化void Sonic_Init(void){Sonic_RCC_Configuration();Sonic_GPIO_Configuration();Sonic_NVIC_Configuration();Sonic_TIM_Configuration();}://打开超声波需要使用的系统资源的时钟void Sonic_RCC_Configuration(void){RCC_APB2PeriphClockCmd(SONIC_RCC_APB2Periph_GPIOx_OUT|SONIC_RCC_APB 2Periph_GPIOx_IN,ENABLE);//打开时钟RCC_APB1PeriphClockCmd(SONIC_RCC_APB1Periph_TIMx,ENABLE);}//这里设置超声波检测所需要的引脚的相应功能void Sonic_GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;/*············波形输出驱动超声波···········*/GPIO_InitStructure.GPIO_Pin=SONIC_GPIO_Pinx_OUT;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//GPIO_Init(SONIC_GPIOx_OUT,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = SONIC_GPIO_Pinx_IN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(SONIC_GPIOx_IN, &GPIO_InitStructure);}//打开中断,设置中断优先级void Sonic_NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); //设置优先级NVIC_InitStructure.NVIC_IRQChannel=SONIC_TIMx_IRQn;//使能外部中断线1(IRQ通道)NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0; //先占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority=0; //从优先级NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_Init(&NVIC_InitStructure);}//定时器的初始化配置void Sonic_TIM_Configuration(void){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM_ICInitTypeDef TIM_ICInitStructure;/*通用定时器配置*/TIM_TimeBaseStructure.TIM_Period =65535; //TIMx->ARR 设置自动装载值TIM_TimeBaseStructure.TIM_Prescaler =72; //TIMx->PSC 设置预分频器值TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1;//设置时钟频率TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; /选择计数器模式TIM_TimeBaseInit(SONIC_TIMx, & TIM_TimeBaseStructure);TIM_OCStructInit(&TIM_OCInitStructure); //默认参数TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//模式1设置输出比较3模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置为输出TIM_OCInitStructure.TIM_Pulse =21; //设置捕获比较寄存器4值即占空长度TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;//设置输出极性-高电平TIM_OC4Init(SONIC_TIMx, &TIM_OCInitStructure); //初始化TIMx通道4.TIM_OC4PreloadConfig(SONIC_TIMx, TIM_OCPreload_Enable);//TIMx->CCMR2 OC4PE 输出比较4的预加载使能位TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;TIM_ICInitStructure.TIM_ICFilter = 0x0;TIM_PWMIConfig(SONIC_TIMx, &TIM_ICInitStructure);/* Select the TIM3 Input Trigger: TI2FP2 */TIM_SelectInputTrigger(SONIC_TIMx, TIM_TS_TI2FP2);/* Select the slave Mode: Reset Mode */TIM_SelectSlaveMode(SONIC_TIMx, TIM_SlaveMode_Reset);/* Enable the Master/Slave Mode */TIM_SelectMasterSlaveMode(SONIC_TIMx, TIM_MasterSlaveMode_Enable);/* TIM enable counter */TIM_Cmd(SONIC_TIMx, ENABLE);/* Enable the CC2 Interrupt Request */TIM_ITConfig(SONIC_TIMx, TIM_IT_CC2, ENABLE);}//定时器中断里边的内容void TIMx_IRQHandler(void){if(TIM_GetITStatus(SONIC_TIMx,TIM_IT_CC2)!=RESET){TIM_ClearITPendingBit(SONIC_TIMx,TIM_IT_CC2);value1=TIM_GetCapture2(SONIC_TIMx);if(value1!=0){value2=TIM_GetCapture1(SONIC_TIMx);}else{value1=0;value2=0;}time=value2;}}//12864液晶显示模块初始化//初始化液晶,引脚初始化,发送初始化命令void initlcd12864(){GPIO_Config();write_com(0x30);delayms(1);write_com(0x0c);//整体显示开游标关游标位置关delayms(1);write_com(0x01);delayms(5);}//液晶引脚资源初始化void GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOx|RCC_APB2Periph_GPIOy,ENAB LE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOx, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOy, &GPIO_InitStructure);}//打印显示汉字程序,包括设定显示坐标,显示内容void hanzi(unsigned char x,unsigned char y,unsigned char *z) //显示汉字字符{unsigned char pos;if(x==0)x=0x80;if(x==1)x=0x90;if(x==2)x=0x88;if(x==3)x=0x98;pos=x+y;write_com(pos);while(*z!='\0'){write_date(*z);z++;}}//主函数内容int main(void){u8 a,b,c,d;SystemInit();GPIO_Configuration();//串口引脚初始化USART_Configuration(9600);//串口初始化,方便系统调试Delay_Configuration(72);//系统延时函数初始化Sonic_Init();//超声波初始化initlcd12864();//液晶显示模块初始化printf("\n OK \n"); //初始化结束串口打印OK信息while(1){a=Sonic1();b=Sonic2();c=Sonic3();d=Sonic4();if(a<=100) hanzi(0,0,"1号车位无车");else hanzi(0,0,"1号车位有车");if(b<=100) hanzi(0,0,"2号车位无车");else hanzi(0,0,"2号车位有车");if(c<=100) hanzi(0,0,"3号车位无车");else hanzi(0,0,"3号车位有车");if(d<=100) hanzi(0,0,"4号车位无车");else hanzi(0,0,"4号车位有车");delayms(100);}}。
基于单片机的停车场智能控制系统的设计
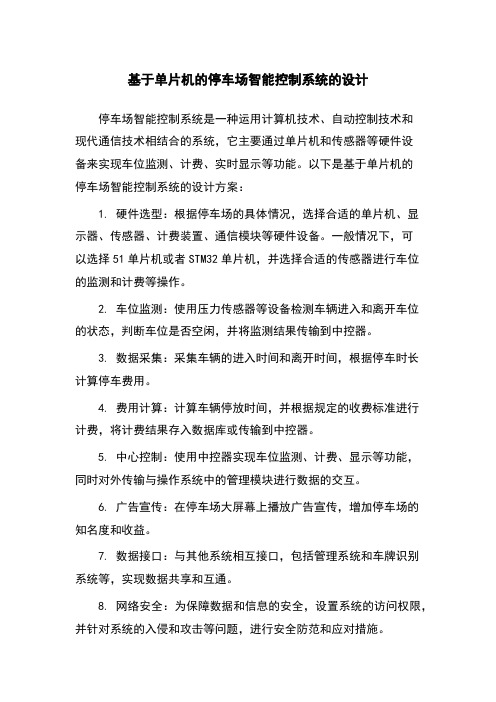
基于单片机的停车场智能控制系统的设计
停车场智能控制系统是一种运用计算机技术、自动控制技术和
现代通信技术相结合的系统,它主要通过单片机和传感器等硬件设
备来实现车位监测、计费、实时显示等功能。
以下是基于单片机的
停车场智能控制系统的设计方案:
1. 硬件选型:根据停车场的具体情况,选择合适的单片机、显
示器、传感器、计费装置、通信模块等硬件设备。
一般情况下,可
以选择51单片机或者STM32单片机,并选择合适的传感器进行车位
的监测和计费等操作。
2. 车位监测:使用压力传感器等设备检测车辆进入和离开车位
的状态,判断车位是否空闲,并将监测结果传输到中控器。
3. 数据采集:采集车辆的进入时间和离开时间,根据停车时长
计算停车费用。
4. 费用计算:计算车辆停放时间,并根据规定的收费标准进行
计费,将计费结果存入数据库或传输到中控器。
5. 中心控制:使用中控器实现车位监测、计费、显示等功能,
同时对外传输与操作系统中的管理模块进行数据的交互。
6. 广告宣传:在停车场大屏幕上播放广告宣传,增加停车场的
知名度和收益。
7. 数据接口:与其他系统相互接口,包括管理系统和车牌识别
系统等,实现数据共享和互通。
8. 网络安全:为保障数据和信息的安全,设置系统的访问权限,并针对系统的入侵和攻击等问题,进行安全防范和应对措施。
基于单片机的自动寻位立体车库系统的设计

Design of Automatic Location Stereo Garage Based
on
Single Chip
Microcomputer
YANG
Qing—iiang,ZHAO Jian—jun,BAO Yi—dong
Information University,Kaifeng 475001,China) were introduced in this paper,and
put
stereo garage
forward.
microcomputer;automatic location system
万 方数据
万 方数据
万 方数据
2008年第1囊
耪素亮.营:基于单麓缸鼹鸯套零位、取车检测与修改和动力控制等部分。
图4库门控制电路
4络论
机械式立体车库是当前车库设计的一个热点,用 它来代替平面车库是今后的发展趋势。本文设计的多 边棱柱式壹动等位立体车库系统是一种餐新黧静立俸 车库,是河南犬学参加大学生创业大赛的项目,车库 模型悉经设计刽终完成。下一步戆藤标就是继续改进 模型,争取早日投入使用。
参考文献: [1]熊新民.一种小容量立体车库及其电气控制系统[J].机 床电器.1999(6):28.29。 [z]藏±杰,李斌,师占群+等.基于PLC控制的液压立体车 库的设计[J].机床与液服.2006(1){103—104. [3】赓义潺,谭豢文,詹义龙,簿。基手攀跨裰控裁鹃撬攘式立 图5窜库系统软律流程圈 体车库[J].机械工程与自动化,2006(2):31—36.
(Institute of Advanced Control
and Intelligent
Processing・Henan
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机课程设计
题目:基于单片机自动车库门的设计
学院:
姓名:
学号
专业:电子信息科学与技术
年级:
指导老师:
摘要:本设计主要利用单片机控制车库门的自动开启与关闭。
系统采用80C51单片机。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S 后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
具体设计如下所述。
关键词:80C51单片机限位开关
Abtrac: input to a single chip microcomputer to within the data processing, on through the parallel port P1 output, control the action of automatic door, when performing garage door into instructions after 5 S automatic door began to move forward, to move forward until contact limit switches, the garage door to stop. When performing
garage door back instructions after 5 S, garage door back after contact sports to limit switches is to stop the control circuit is simple, practical, good reliability. The specific design as described below.
Keyword:80 C51 limit switch
目录:(一)引言
(二)设计任务
(三)项目原理
(1)单片机并行口的分配
(2)项目线路连接
(四)项目参考程序
(1)项目程序流图
(2)项目参考程序
(五)总结参考文献谢词
一、引言:随着经济的发达,拥有车的人越来越多,对好的
车库门的需求也不断增大,本文是对车库门的机械和控
制系统的具体设计说明沿用了单片机对电动机的控制的
方法。
二、设计任务:利用主控芯片80C51来控制车库门的开启和
关闭。
三、项目原理
系统采用80C51单片机。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
(1)单片机并行口的分配
(2)项目线路连接
四、项目参考程序
(1)项目程序流程图
(2)项目参考程序
项目参数程序如下
; 输入输出引脚定义
;输出
Y1 BIT P1.0 ;关门主接触器
Y2 BIT P1.0 ;开门主接触器
Y3 BIT P1.0 ;信号灯光
;输入
CPL Y3
SB1 BITP3.0 ;关门开关SB2 BITP3.1 ;开门开关SQ1 BITP3.4 ;关门限位SQ2 BITP3.5 ;开门限位
;中断标志进位定义
STOP BIT 00H ;外部中断0、P3.2引脚接停止开关
SA VE BIT 01H ;外部中断1、P3.3引脚接安全压力挡板
ORG 000H
AJMP MAIN
ORG 0003H
CLR EX0
SETB STOP ;外部中断0、置位停止开关
RETI
ORG 0013H
CLR EX1
SETB SA VE ;外部中断1、置位安全压力挡板
RETI
主程序
MAIN: MOV P1 ,#001H ;初始化MOV P3,#00H
CLR STOP
CLR SA VE
SETB EA
SETB EX0 ;允许外部中断0、P3.2引脚接停止开关中断
SETB EX1 ;允许外
部中断0、P3.2引脚接停止开关中断
SETB PX1 ;安全压力挡板中断级别高
MAIN1: JB STOP,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
JB SB1,CLOSE ;是否关门
JB SB2 OPEN ;是否开门
AJMP MAIN1
;停止
STOP1: SETB EX0
CLR STOP ;若停止开,关,清标志位
CLR Y1 ;停关门
CLR Y2 ;停开门
CLR Y3 ;停闪烁
AJMP MAIN1
;安全挡板
SA VE: SETB EX1
CLR SA VE ;若安全挡板,清标志位
CLR Y1 ;停关门
CLR Y 3 ;停闪烁
AJMP MAIN1
;关门
CLOSE:SETB Y3 ;置闪烁标志
MOV R2,#10 ;10次CLOSE:ACALL DEL500 ;延时500毫秒
JB STOP,STOP1 ;是否停止开关
JB SA VE,SVE1 ;是否安全挡板
CPL Y3
DJNZ R2,CLOSE
SETB Y1 ;启动开门
CLR Y2 ;关闭开门CLOSE2:JB STOP,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
JB SQ1, STOP1 ;是否限位
ACALL DEL500 ;闪烁
CPL Y
AJMP CLOSE2
;开门
OPEN: SETB Y3 ;置闪烁标志MOV R2,#10H ;10次OPEN1: ACALL DEL500 ;延时500毫秒
JB STOP ,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
CPL Y3
DJNZ R2,OPEN1
SETB Y2 ;启动开门
CLR Y1 ;关闭开门OPEN2: :JB STOP,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
JB SQ2, STOP1 ;是否限位
ACALL DEL500 ;闪烁
CPL Y3
AJMP OPEN2
;延时500s程序
ORG 0030H
DEL500:MOV R3 #5
LOOP3: MOV R5,#100
LOOP1:MOV R6,#250
LOOP2: DJNZ R2,LOOP2
DJNZ R1,LOOP1
DJNZ R3,LOOP3
RET
END
(五)总结参考文献谢词
总结:论文题目选定后,……..
参考文献:[1]刘南平孙惠斤童帆苏梅编著【单片机实训与开发教程】科学出版社
[2]杨光友朱宏辉杨光祥张锋编著【单片微型计算机原理及接口技术】中国水利电力出版社
[3]兰吉昌编著【51单片机应用设计百例】化学工业出版社
[4]胡汉才【编著单片机原理及接口技术】(第三版)清
华啊出版社
[5]李群芳肖看编著【单片机原理接口应用—嵌入式系统技术基础】清华大学出版社
[6]申凤琴主编【电工电子技术基础】机械工业出版社
[7]孙津平主编【数字电子技术】西安电子科技大学出版社
孙蕙莖编著【单片机设计项目设计程序】电子工业出版社
谢词:。