二自由度机械臂动力学分析培训资料
ch3 (二自由度机械系统动力学)
二自由度机械系统动力学
1
第3章 二自由度机械系统动力学
本章内容 3.1 引言——力学的发展过程 3.2 自由度与广义坐标 3.3 虚位移原理与广义力 3.4 拉格朗日方程(重点) 3.5 二自由度机械系统动力学方程 3.6 二自由度机械手动力学问题
2
前一章主要内容:
21
第三个100年,以爱因斯坦的狭义相对论为先导,进入 现代物理学研究阶段。 二十世纪三大科学发现: 1. 相对论(Principle of relativity, Special Principle of relativity, General Principle of relativity, Einstein) 2. 量子力学(Quantum mechanics, Bohr ) Quantum theory, especially the quantum theory of the structure and behavior of atoms and molecules. 3 . 混沌学(Chaos, Poincare )
5
6
7
8
本章采用的方法:拉格郎日方程(重点) 二自由度机械系统动力学不采用等效 力学模型法,一般采用拉格郎日方程来建 模。 在学习拉格郎日方程之前,必须掌握 一些重要的概念,如广义坐标、广义力、 虚位移等。首先了解一些科学史观,培养 科学精神。
9
《易》曰:形而上者谓之道,形而下者谓之器。
力学发展过程 3个100年 第一个100年,从牛顿的《自然哲学的数学原理》开 始(1687),到18世纪后期。本阶段还有伯努利、 欧拉、达朗伯等人。
22
微观力学最新研究成果: 1在微观领域内,不确定性是固有的; 2观察结果受观察者精神作用的影响; 3前卫科学家研究发现,研究成果与东 方哲学(佛学)相吻合。
机械系统动力学作业---平面二自由度机械臂运动学分析资料讲解
机械系统动力学作业---平面二自由度机械臂运动学分析平面二自由度机械臂动力学分析[摘要]机器臂是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。
本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。
经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。
[关键字]平面二自由度机械臂动力学拉格朗日方程一、介绍机器人是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。
机器人动力学问题有两类:■ ■■(1)给出已知的轨迹点上的■J- ■■■■■■,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q。
这对实现机器人动态控制是相当有用的。
(2)已知关节驱动力矩,求机器人系统相应的各瞬时的运动。
也就是说,给出关节力矩■ ■■向量T求机器人所产生的运动風&及&。
这对模拟机器人的运动是非常有用的。
二、二自由度机器臂动力学方程的推导过程机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。
机器人动力学方程的具体推导过程如下:(1)选取坐标系,选定完全而且独立的广义关节变量O r , r=l, 2,…,n。
(2)选定相应关节上的广义力F r :当O r是位移变量时,F r为力;当O r是角度变量时, F r为力矩。
(3)求出机器人各构件的动能和势能,构造拉格朗日函数。
(4)代入拉格朗日方程求得机器人系统的动力学方程。
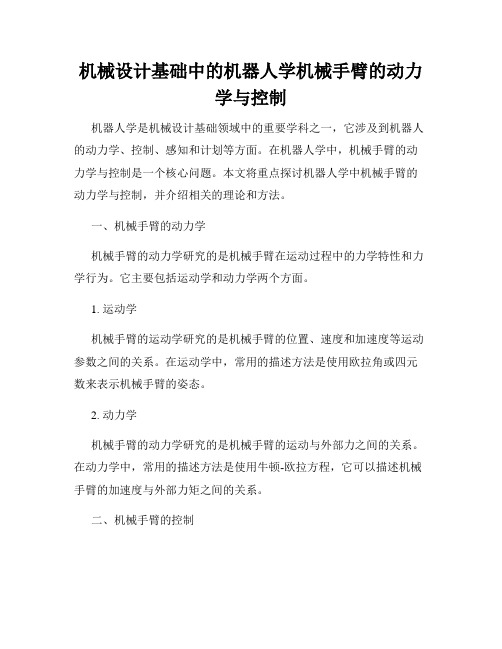
下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
1平更二自由度机械臂1、分别求出两杆的动能和势能设齐、B 2是广义坐标,Q i、Q2是广义力。
两个杆的动能和势能分别为:式中,’是杆1质心C i.,\ )的速度向量,\是杆2质心C i ( ' , J )的速度向量。
两自由度机械手动力学问题
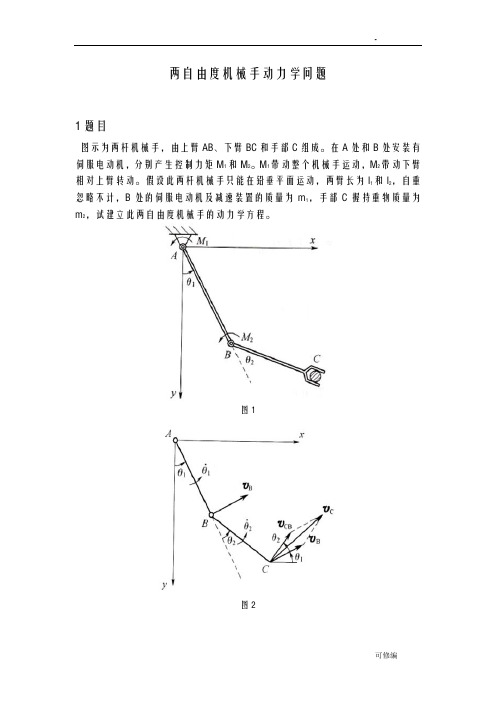
两自由度机械手动力学问题1题目图示为两杆机械手,由上臂AB、下臂BC和手部C组成。
在A处和B处安装有伺服电动机,分别产生控制力矩M1和M2。
M1带动整个机械手运动,M2带动下臂相对上臂转动。
假设此两杆机械手只能在铅垂平面运动,两臂长为l1和l2,自重忽略不计,B处的伺服电动机及减速装置的质量为m1,手部C握持重物质量为m2,试建立此两自由度机械手的动力学方程。
图1图22数值法求解2.1拉格朗日方程此两杆机械手可以简化为一个双摆系统,改双摆系统在B 、C 出具有质量m 1,m 2,在A 、B 处有控制力矩M 1和M 2作用。
考虑到控制力矩M 2的作用与杆2相对杆1的相对转角θ2有关,故取广义力矩坐标为2211,θθ==q q系统的动能为二质点m 1、m 2的动能之和,即由图2所示的速度矢量关系图可知以A 处为零势能位置,则系统的势能为由拉格朗日函数,动势为:广义力2211,M Q M Q ==求出拉格朗日方程中的偏导数,即代入拉格朗日方程式,整理得:2.2 给定条件 (1)角位移运动规律()231*52335.0*1163.0t t t +-=θ,()232*52335.0*1163.0t t t +-=θ21θθ和都是从0到90°,角位移曲线为三次函数曲线。
(2)质量m 1=4㎏ m 2=5kg (3)杆长l 1=0.5m l 2=0.4m2.3 MATLAB 程序t=0:0.1:3;theta1=-0.1163*t.^3+0.52335*t.^2; w1=-0.3489*t.^2+1.0467*t; a1=-0.6978*t+1.0467;theta2=-0.1163*t.^3+0.52335*t.^2; w2=-0.3489*t.^2+1.0467*t; a2=-0.6978*t+1.0467;m1=4; m2=5;l1=0.5; l2=0.4; g=9.8;D11=(m1+m2)*l1.^2+m2*l2.^2+2*m2*l1*l2*cos(theta2); D22=m2*l2.^2;D12=m2*l2.^2+m2*l1*l2*cos(theta2); D21=m2*l2.^2+m2*l1*l2*cos(theta2); D111=0;D122=-m2*l1*l2*sin(theta2); D222=0;D211=m2*l1*l2*sin(theta2); D112=-m2*l1*l2*sin(theta2); D121=-m2*l1*l2*sin(theta2); D212=0; D221=0;D1=(m1+m2)*g*l1*sin(theta1)+m2*g*l2*sin(theta1+theta2); D2=m2*g*l2*sin(theta1+theta2);M1=D11.*a1+D12.*a2+D111.*w1.^2+D122.*w2.^2+D112.*w1.*w2+D121.*w2.*w1+D1; M2=D21.*a2+D22.*a2+D211.*w1.^2+D222.*w2.^2+D212.*w1.*w2+D221.*w2.*w1+D2; T1=polyfit(t,M1,3) T2=polyfit(t,M2,3)subplot(2,1,1),plot(t,M1),grid on,xlabel('时间(s )'),ylabel('控制力矩(N ·m )'),title('motion1') subplot(2,1,2),plot(t,M2),grid on,xlabel('时间(s )'),ylabel('控制力矩(N ·m )'),title('motion2')2.4 数值计算结果()6167.1*7993.31*7329.3*5685.3t 231+++-=t t t M ()5449.1*9801.25*9481.8*0679.0t 232-+--=t t t M图3 M 1变化规律图图4 M2变化规律图3 ADAMS仿真3.1模型建立图5 模型图3.2 施加运动在两个关节处分别施加位移函数图6 关节运动施加图位移函数为:step(time,0,0,3,pi/2)运动规律如下图所示:图7 关节处运动规律图3.3 运动仿真设置仿真时间为3s,步数为300步,仿真结果如下图所示:图8 关节1处控制力矩仿真结果图图9 关节2处控制力矩仿真结果图4 结果对比图10 控制力矩M1结果对比图图11控制力矩M2结果对比图从函数规律上看,两种求解方法得出的结果几乎一样;从数值上看:t 0 0.5 1.0 1.5 2 2.5 3.0 数值计算M1 7.1699 14.3348 33.4367 49.4650 51.6557 44.8470 40.0971 仿真求解M1 7.4526 14.5646 33.5798 49.5093 51.5775 44.6398 39.8039表2 控制力矩M2数值结果对比由上两表可以看出:数值计算结果与仿真求解结果相差很小,误差围为0.437%-0.731%,出现这种结果的原因可能是因为两种方法计算的精度不同,或者是算法存在差异。
机械动力学第二章——两自由度振动讲解
k1 c1
F1(t)
m1
x1 k2
c2
F2(t)
m2
x2 k3
c3
建立坐标:x1,x2的原点分别取在m1,m 2的静平衡位置
受力分析:
F1(t)
F2(t)
k1x1
c1 x1
k2(x2-x1) m1
k2(x2-x1) m2
c2 (x2 x1) c2 (x2 x1)
k3x2
c3 x2
8
两自由度系统的振动微分方程
特解 2: x12 (t) sin 02t 2 , x22 (t) 2 sin 02t 2
由特解线性叠加可以得到通解:
x1(t) C1 sin 01t 1 C2 sin 02t 2
x2
(t
)
1C1
sin
01t
1
2C2
sin
02t
2
20
教学内容
两自由度系统的振动微分方程 两自由度系统的无阻尼自由振动 两自由度系统的强迫振动
21
两自由度系统的强迫振动
装在梁上或者板上的的转动电机,由于转子的不 平衡,或者说转子质量不均匀,在电机高速转动下,梁 或者板将发生上下振动。试问如何减小振动。 (1)提高电机质量 (2)增加阻尼 (3)动力吸振器
14
两自由度系统的无阻尼自由振动
图示两自由度系统,无阻尼,无激励
k1
k2
k3
m1
m2
振动微分方程为:
m1x1 (k1 k2 )x1 k2 x2 0 m2 x2 (k2 k3 )x2 k2 x1 0
令:
机械设计基础中的机器人学机械手臂的动力学与控制
机械设计基础中的机器人学机械手臂的动力学与控制机器人学是机械设计基础领域中的重要学科之一,它涉及到机器人的动力学、控制、感知和计划等方面。
在机器人学中,机械手臂的动力学与控制是一个核心问题。
本文将重点探讨机器人学中机械手臂的动力学与控制,并介绍相关的理论和方法。
一、机械手臂的动力学机械手臂的动力学研究的是机械手臂在运动过程中的力学特性和力学行为。
它主要包括运动学和动力学两个方面。
1. 运动学机械手臂的运动学研究的是机械手臂的位置、速度和加速度等运动参数之间的关系。
在运动学中,常用的描述方法是使用欧拉角或四元数来表示机械手臂的姿态。
2. 动力学机械手臂的动力学研究的是机械手臂的运动与外部力之间的关系。
在动力学中,常用的描述方法是使用牛顿-欧拉方程,它可以描述机械手臂的加速度与外部力矩之间的关系。
二、机械手臂的控制机械手臂的控制研究的是通过控制器对机械手臂进行运动和姿态的控制。
在机器人学中,常用的控制方法有位置控制、速度控制、力控制和姿态控制等。
1. 位置控制位置控制是一种基本的控制方法,它通过控制机械手臂的关节位置,实现对机械手臂的精确控制。
常用的位置控制方法有PID控制和模糊控制等。
2. 速度控制速度控制是一种对机械手臂的运动速度进行控制的方法,它可以实现对机械手臂的定速和变速控制。
常用的速度控制方法有PID控制和预测控制等。
3. 力控制力控制是一种对机械手臂的外部力进行控制的方法,它可以实现对机械手臂的力保持和力调节控制。
常用的力控制方法有阻抗控制和自适应控制等。
4. 姿态控制姿态控制是一种对机械手臂的姿态进行控制的方法,它可以实现对机械手臂的方向和角度的控制。
常用的姿态控制方法有模型预测控制和滑模控制等。
三、机械手臂的应用机械手臂广泛应用于工业生产、医疗护理、军事应用等领域。
在工业生产中,机械手臂可以代替人工完成重复性、繁琐或危险的工作任务,提高生产效率和产品质量。
在医疗护理中,机械手臂可以用于手术操作、康复训练等,帮助医生提高精确度和安全性。
第二章两自由度机构动力学分析
r
17
F2 s2
M1
r
计算广义力:
动力学方程:
r 1 2m2 r Q1 J11q 2 J q m r Q2 2 22 2
18
1 J12 q 2 Q1 J11q 动力学方程: J q 2 Q2 21 1 J 22 q
差动轮系动力学方程,可以直接应用此结论式。
16
例5:已知:J1 A , m2 , J s 2 , M 1 , F2
重力略,建立运动方程。
s2
M1
F2
分析:选广义坐标: q1 , q2 r
方法1:
1 2 1 3 i21 , i22 2 2
2 0, 即H不动,则: 方法2: 令q
同理
1 0, 令q
1 i 即1轮不动,则: 2 H i22
3 i22 2
求:i31 , ห้องสมุดไป่ตู้32
1 1 ( ) 8
15
2 J H iH 2
计算广义力:
此为二阶非线性微分方程,用数值解法求解。
13
例4:已知差动轮系中:
,各轮质量略。
1 , H 求:
分析:取广义坐标: q1 1 , q 2 H
1 q1 2, 2 ', 3 q1 , q2
H q2
则:
1 H
14
求:i21 , i22
第二章 两自由度机构动力学分析
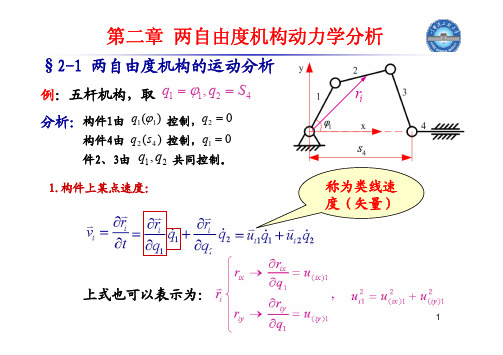
§2-1 两自由度机构的运动分析 例:五杆机构,取 q1 1 , q2 S 4
分析:构件1由 q1 (1 ) 控制,q2 0
构件4由 q2 ( s4 ) 控制,q1 0 件2、3由
机械手臂运动学分析与控制
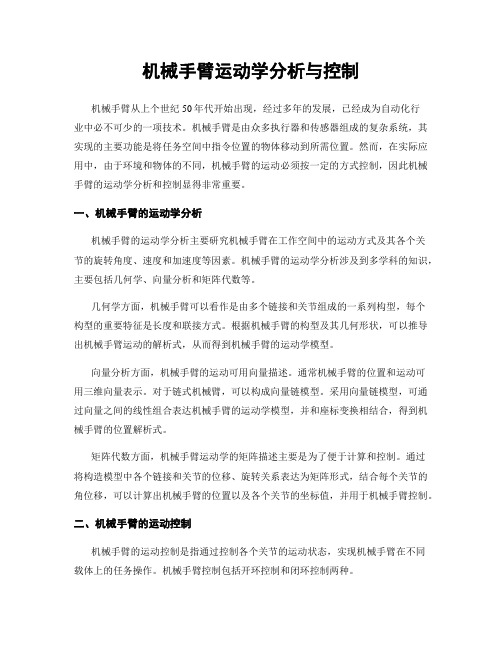
机械手臂运动学分析与控制机械手臂从上个世纪50年代开始出现,经过多年的发展,已经成为自动化行业中必不可少的一项技术。
机械手臂是由众多执行器和传感器组成的复杂系统,其实现的主要功能是将任务空间中指令位置的物体移动到所需位置。
然而,在实际应用中,由于环境和物体的不同,机械手臂的运动必须按一定的方式控制,因此机械手臂的运动学分析和控制显得非常重要。
一、机械手臂的运动学分析机械手臂的运动学分析主要研究机械手臂在工作空间中的运动方式及其各个关节的旋转角度、速度和加速度等因素。
机械手臂的运动学分析涉及到多学科的知识,主要包括几何学、向量分析和矩阵代数等。
几何学方面,机械手臂可以看作是由多个链接和关节组成的一系列构型,每个构型的重要特征是长度和联接方式。
根据机械手臂的构型及其几何形状,可以推导出机械手臂运动的解析式,从而得到机械手臂的运动学模型。
向量分析方面,机械手臂的运动可用向量描述。
通常机械手臂的位置和运动可用三维向量表示。
对于链式机械臂,可以构成向量链模型。
采用向量链模型,可通过向量之间的线性组合表达机械手臂的运动学模型,并和座标变换相结合,得到机械手臂的位置解析式。
矩阵代数方面,机械手臂运动学的矩阵描述主要是为了便于计算和控制。
通过将构造模型中各个链接和关节的位移、旋转关系表达为矩阵形式,结合每个关节的角位移,可以计算出机械手臂的位置以及各个关节的坐标值,并用于机械手臂控制。
二、机械手臂的运动控制机械手臂的运动控制是指通过控制各个关节的运动状态,实现机械手臂在不同载体上的任务操作。
机械手臂控制包括开环控制和闭环控制两种。
开环控制即使在不考虑反馈信息的情况下,通过输入某个指令,控制机械臂达到预定位置。
开环控制的优点是简单易行,应用广泛,而且在一些不精确的应用中已经得到充分的证明。
但是缺点也显而易见,由于不考虑环境和物体的不同,造成了控制误差,机械手臂无法达到精确的移动,并且当机械手臂受到外力干扰时,控制误差将会更加显著。
机械臂运动学动力学
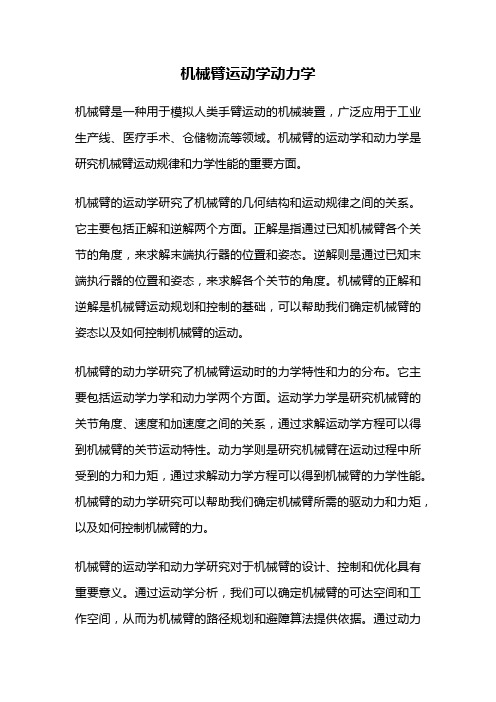
机械臂运动学动力学机械臂是一种用于模拟人类手臂运动的机械装置,广泛应用于工业生产线、医疗手术、仓储物流等领域。
机械臂的运动学和动力学是研究机械臂运动规律和力学性能的重要方面。
机械臂的运动学研究了机械臂的几何结构和运动规律之间的关系。
它主要包括正解和逆解两个方面。
正解是指通过已知机械臂各个关节的角度,来求解末端执行器的位置和姿态。
逆解则是通过已知末端执行器的位置和姿态,来求解各个关节的角度。
机械臂的正解和逆解是机械臂运动规划和控制的基础,可以帮助我们确定机械臂的姿态以及如何控制机械臂的运动。
机械臂的动力学研究了机械臂运动时的力学特性和力的分布。
它主要包括运动学力学和动力学两个方面。
运动学力学是研究机械臂的关节角度、速度和加速度之间的关系,通过求解运动学方程可以得到机械臂的关节运动特性。
动力学则是研究机械臂在运动过程中所受到的力和力矩,通过求解动力学方程可以得到机械臂的力学性能。
机械臂的动力学研究可以帮助我们确定机械臂所需的驱动力和力矩,以及如何控制机械臂的力。
机械臂的运动学和动力学研究对于机械臂的设计、控制和优化具有重要意义。
通过运动学分析,我们可以确定机械臂的可达空间和工作空间,从而为机械臂的路径规划和避障算法提供依据。
通过动力学分析,我们可以确定机械臂所需的驱动力和力矩,从而为机械臂的选型和控制提供依据。
此外,运动学和动力学的研究还可以帮助我们改进机械臂的设计和优化控制算法,提高机械臂的运动精度和工作效率。
机械臂的运动学和动力学是研究机械臂运动规律和力学性能的重要方面。
通过运动学和动力学的研究,我们可以确定机械臂的运动规划和力学控制策略,从而实现机械臂的高效运动和精准操作。
机械臂的运动学和动力学研究不仅对于机械臂的设计和控制具有重要意义,也对于提高工业生产效率和人类生活质量具有积极影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二自由度机械臂动力
学分析
平面二自由度机械臂动力学分析
姓名:黄辉龙 专业年级:13级机电 单位:汕头大学
摘要:机器臂是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。
拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。
经过分析,得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。
关键字:平面二自由度 动力学方程 拉格朗日方程
相关介绍
机器人动力学的研究有牛顿-欧拉(Newton-Euler )法、拉格朗日
(Langrange)法、高斯(Gauss )法等,但一般在构建机器人动力学方程中,多采用牛顿-欧拉法及拉格朗日法。
欧拉方程又称牛顿-欧拉方程,应用欧拉方程建立机器人机构的动力学方程是指研究构件质心的运动使用牛顿方程,研究相对于构件质心的转动使用欧拉方程,欧拉方程表征了力、力矩、惯性张量和加速度之间的关系。
在机器人的动力学研究中,主要应用拉格朗日方程建立机器人的动力学方程,这类方程可直接表示为系统控制输入的函数,若采用齐次坐标,递推的拉格朗日方程也可以建立比较方便且有效的动力学方程。
在求解机器人动力学方程过程中,其问题有两类:
1)给出已知轨迹点上•
••θθθ、及、
,即机器人关节位置、速度和加速度,求相应的关节力矩矢量τ。
这对实现机器人动态控制是相当有用的。
2)已知关节驱动力矩,求机器人系统相应各瞬时的运动。
也就是说,给出关节力矩矢量τ,求机器人所产生的运动•
••θθθ、及、。
这对模拟机器人的运动是非常有用的。
平面二自由度机械臂动力学方程分析及推导过程
1、机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。
机器人动力学方程的具体推导过程如下:
1) 选取坐标系,选定完全而且独立的广义关节变量n r ,,2,1,r ⋅⋅⋅=θ。
2) 选定相应关节上的广义力r F :当r θ是位移变量时,r F 为力;当r θ是角度变量时,r F 为力矩。
3)求出机器人各构件的动能和势能,构造拉格朗日函数。
4) 代入拉格朗日方程求得机器人系统的动力学方程。
2、下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
1)如图1,设21,θθ是广义坐标,21,Q Q 是广义力。
2)分别求出两杆的动能和势能 11112111111sin ,2
121:1θθc c c T c gl m U I v v m E =+=•杆 (1-1) ]sin [,2
121:22112222122222)()(杆θθθθ+=++=••l g m U I v v m E c c T c (1-2)
式中,1c v 是杆1质心),(111c c y x C 的速度向量,2c v 是杆2质心),(222c c y x C 的速度向量。
它们可以根据质心21,C C 的位置方程导出。
3)分别求出两杆的速度 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=)sin ()cos (1111111θθl dt
d l dt d dt dy dt dx v c c c (1-3)
[][]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=)sin(sin )cos(cos 2121121211222θθθθθθc c c c c l l dt
d l l dt d dt dy dt dx v (1-4)
4)代入拉格朗日方程求得机械臂动力学方程
根据具有完整理想约束的有N 个广义坐标系统的拉格朗日方程 n r Q q U q E q E dt d r r r r ,2,1,⋅⋅⋅==∂∂+∂∂-⎪⎪⎪⎭
⎫ ⎝⎛∂∂• (1-5)
式中,r q 是第r 个广义坐标,E 是系统动能,U 是系统势能,r Q 是对第r 个广义坐标的广义力。
该问题为二自由度的动力学研究,所以n=2,由于势能函数U 与广义速度无关,即•∂∂r q U
=0。
由(1-5)式可写成: r r r Q q L q L dt d =∂∂-⎪⎪⎪⎭
⎫ ⎝⎛∂∂• (1-6)
其中,是拉格朗日算子L U E L ,-=
可知在这里拉格朗日算子为:2121U U E E L --+=
代入式(1-6)可导出相应的式子,经过整理得:
Q g C M =++•
••)(),()(θθθθθ (1-7)
式中 ⎥⎦
⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=•21212122211211
,)(,),(,)(Q Q Q g g g C C C M M M M M θθθθ
[]⎪⎪⎪⎪⎩
⎪⎪⎪⎪⎨⎧+=+++==+-=+==++=+++++=•
••)cos()cos(cos cos sin ),2(sin ,)cos ()cos 2(212222*********
22122212221212222221221222122221222122212121111θθθθθθθθθθθθθc c c c c c c c c c c c c gl m g l l g m gl m g l l m C l l m C I l m M M M I l l l m M I l l l l m I l m M 式(1-7)为机械臂在关节空间的动力学方程的一般结构形式,它反映了关节力矩和关节变量、速度、加速度之间的函数关系。
对于n 个关节的机械臂,)(θM 是n n ⨯的正定对称矩阵,是θ的函数,称为机械臂的惯性矩阵;),(•θθC 是nx1的离心力和科氏力矢量;)(θg 是nx1的重力矢量,与机械臂的形位θ有关。