船舶操纵模拟训练系统中的随动舵设计
基于 PR -6000的万吨级散货船自动舵系统设计

舵中的自 适应控制系统依靠在线辨识对于不断变化的航行 数据进行分析处理, 实时调整系统中的模型参数, 通过 自 适 应算法改变船舶的舵角, 最终使得船舶航行中的动舵次数
最少、 偏航幅度最小 , 船舶处于最佳航行状态。 1 . 1 . 3 智能控制理论与智能 自动舵。智能控制是将人
L —— — —— —— —— —————— ——— — —— —— —— —— ——— — —— — . . . J
舵仪。下面对 自 适应自动舵的工作原理进行简单分析。
在自适应 自动舵的控制系统中关键的问题是 自 校正控
关键 , 也就是调整比例系数、 积分时间以及微分时间以符合 制方案的确定, 如图 1 所示。被控制对象与 自动校正控制 器是该系统的两个重要部分。船舶在航行过程中水面状 载重量以及水的深度都在变化, 这就使得船舶的运动特性 况、 速度情况、 载重情况都在不断变化, 相应地, 舵角也在不 也在不断变化; 与此同时风流、 水流以及波浪等水面情况也 断变化。船舶的运动和各种扰动使得系统的模型参数一直 要通过在线辨识实时分析处理变化中的数 在变化, 对船舶的运动形成扰动。这就要求 P I D自动舵的 处于变化中, _ 5 自 校正控制器在系统运行 中使模型参数能够进行 自 操作要能对增益、 积分时间和微分时间进行调节, 以达到较 据。
1 . 1自 动控制理论与自动舵的发展。
1 . 1 . 1比例微分积分控制技术与 P I D自动舵。P I D即 少了对数学模型的依赖性。
比例微分积分控制技术。P I D功能的实现主要是依靠模拟
电子电路去搭建完成。其具有简单的结构、 稳定的性能、 可 靠的工作度, 调整也较方便。数学模型的建立需要许多确 定的参数, 这就决定了 P I D控制具有一定的确定性。 在以 P I D控制器为核心的 自动控制系统中, 参数的整定是 被控制过程的特性。船舶在航行过程中, 船舶的航行速度、
自动舵操作
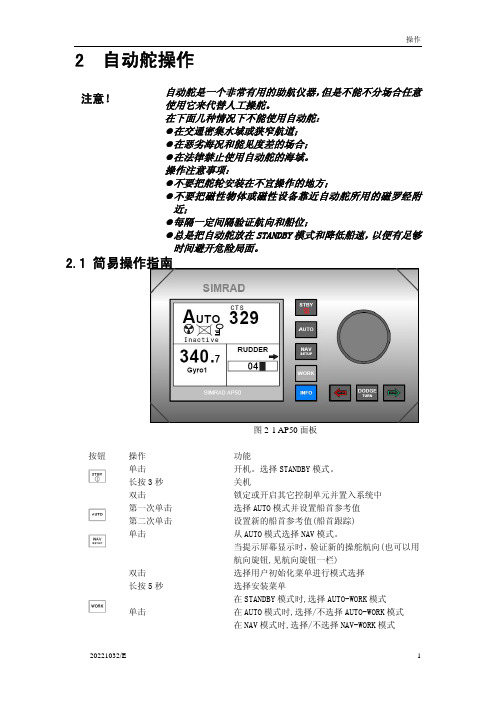
按 AUTO 键,选择船舶当前航向作为设定航向。
按 STBY 键,重新回到手操舵模式。
20221032/E
7
Simrad AP50 自动舵
警告! 注意!
AUTO-WORK 模式 AUTO-WORK 模式也是一种自动舵操作模式,但与通常的自动舵模 式保持船舶在目前航向上有所不同,在下面情况下用 AUTO-WORK 模式:拖网捕鱼、拖轮、托钓作业等减速慢性航行状态。 在这种情况下,一些船可能需要进行不同的设置。按 WORK 键,可 以另外进行操舵设置和转向半径等设置,也可以从 STANDBY 或 DODGE 模式进入到 AUTO-WORK 模式时设定舵角如何变化。
21易操作指南simradap50自动舵20221032e单击长按5双击选择屏幕为仪器信息显示屏选择单位确定所选的仪器信息被显示短按一次长按3第二次长按启动dodging启动uturn启动cturn在standby模式按一次auto模式按一次在用户初始化或安装菜航向向左调整15或10回到前一个菜单项在standby模式按一次在auto模式按一次在用户初始化或安装菜航向向右调整15或10进入下一个菜单项同时按一次启动随动followup操舵模式航向旋钮在随动followup操舵模式旋转在auto模式旋转在nav模式旋转在dodge模式旋转在用户初始化或安装菜单中旋转设置命令舵角逆时针旋转表示向左改变航向
2.6 自动操舵
AUTO 模式 AUTO 模式用来自动操纵船舶保持在设定航向。按一次 AUTO 键 AP50 进入自动舵模式,此时 AP50 自动选择船舶当前航向作为设定 航向并且舵角移到中间位置。
在 AUTO 模式,AP50 发出的舵令保持船舶在设定航向,船首由操舵 罗经提供。
AP50 一直保持船舶在设定的航向直至选择新的操舵模式或用航向 旋钮、左右键设定新航向或再一次按 AUTO 键。航向旋转钮旋转一 圈相当于航向改变 45°。
船舶自动舵的设计
船舶自动舵的设计-CAL-FENGHAI.-(YICAI)-Company One1船舶自动舵的设计吕振望,高帅(大连海事大学航海学院大连 116026 )摘要:自动舵作为船舶改变航向和保持船舶航行在给定航向上的重要设备,对于船舶航行的安全性和经济性具有至关重要的作用。
本文就自动舵设计所采用的二阶响应数学模型(Nomoto模型)进行了介绍。
同时,主要以在线自整定PID(Proportional Integral Differential)船舶自动舵为例,简述了继电型自整定PID控制的基本原理及PLC(Programmable Logic Controller)实现的基本方法,给出了基于PLC的在线自整定PID船舶自动舵的设计原理和实现方案。
关键词:船舶自动舵;自整定PID;船舶0 引言自动舵是一种自动操舵装置控制系统,能模拟并代替人力操舵,还可和其他导航设备结合组成自动导航系统,使船舶全程无人驾驶成为可能,大大提高了自动化水平。
随着智能控制理论与计算机工业的飞速发展,许多新型的控制理论伴着微型计算机的广泛应用,同样也应用到自动舵上。
本文主要以自整定PID 自动舵为例,说明了船舶自动舵的设计原理,对在自动舵设计中,所采用的数学模型进行了探讨,同时介绍自整定PID 的算法以及如何正确地使用自动舵。
1 船舶自动舵的设计原理船舶自动舵的主要结构是控制系统,其标准反馈结构图1如下:信号部分r ,d ,y ,u ;控制部分K ;被控对象部分P ;和传感器部分M 。
图1 控制系统的框图1.1 船舶运动响应模型研究船舶自动舵的设计需从船舶运动的数学模型开始,船舶运动的数学模型是船舶自动舵设计原理中很重要的一部分。
本文以响应模型[1]为例来说明船舶的运动。
响应模型略去了横漂速度,抓住船舶动态从舵角到航向的导数再到航向的主要脉络,所获得的微分方程可保留非线性影响,把风浪干扰作用折合成为某一种干扰舵角构成一种输入信号与实际舵角δ一道进入船舶模型。
PCI-6221型采集卡在船舶操纵模拟器中的应用
8
船 舶 模 拟 随 动 舵 的 设 计 目的就 是 仿真 实 际航
需求 ,在 充 分考 虑 了船 舶 模 拟 训 练 功 能 的完 善 与 实用 的基 础 上 , 开发 出 的 多单 元 仿 真 训 练 系 统 。
一
台船 舶 操 纵模 拟 器 模 拟 一条 船 ,前 面 板 上 用 一
数 字 量 电压 信 号采 集 、监 视 输 入 和 模 拟 量 电压信
相 对 较 低 ,具 有 很 高 的 性价 比。
台 液 晶 显 示 器模 拟 视 景 ,操 作 台上 则 分 布 着 操 纵 设 备 。模 拟 器 内置 一 台计 算 机 ,实 时采 集 左 、右
车 的行 车状 态 和 舵轮 的舵 角等 各 种 数 据 来 操 纵 船
舶航 行 ,采 集 的 数据 经 过 处理 、分 析 后 ,软 件 自 动将 船 舶 的 运 行 参 数和 航 向数 据 等 如 实 传 送 到 显 示器上 。 操 作 台上 的操 纵 设 备 , 包括操舵装置 ( 随 动 舵 、应 急 舵 )、 罗 经 、 车钟 、 声号 控 制 、视 景 切 换 等 均 采 用 半 实 物 仿真 ,利 用 安装 在 计 算 机 内 部 的 数据 采 集 卡 来 完 成对 这 些操 纵 设 备 状 态 的采
关键 词 :数据 采集 卡 中 图 分 类 号 :T P 2 7 3 模 拟随 动舵 模 拟 罗 经 文章 编号 : 1 0 0 3 — 4 8 6 2( 2 0 1 3 )0 1 — 0 0 0 8 — 0 3
文 献 标 识 码 :A
Appl i c a t i o n o f Sh i p Ha n dl i ng S i m ul a t o r Ba s e d o n PCI 一 6 2 2 1 Da t a
船舶舵的设计

船舶超纵性及船舶舵的设计 一、 船舶超纵性(一)什么是船舶操纵性1、船舶操纵性是船舶保持或改变航向的能力⑴小舵角下的航向保持性; ⑵中等舵角的航向改变性;⑶大舵角的船舶回转性。
2、船体、螺旋桨、舵之间的相互影响(1)舵位于船体和螺旋桨后方,受到船体伴流和螺旋桨尾流影响,舵的存在及舵角变化也影响船体及桨的受力。
(2)把舵臵于桨的尾流内,不仅可吸收旋转尾流能量,还可减少涡能损失,从而提高推进效率。
有时从快速性角度把舵和桨一起作为推进系统的一部分。
(3)舵、桨需得到船体的有效的保护。
3、舵受力分析P — 舵力(N ); P n — 法向力(N );P t — 摩擦力(N ); P y — 升力(N ); P x — 阻力(N ); δ(α) — 舵角(°),也叫舵的攻角;; A R — 舵叶浸水面积(m 2);V R — 舵叶对水速度(m/s ) 4、影响舵力大小的因素(1)、舵与船体间相互干扰:尾部船体两侧,相当于增加了舵叶面积,从而使舵力增加。
舵与船尾越近,增加越明显。
(2)、伴流的影响:船体周围部分水追随船运动而形成的水流称伴流。
它使舵力下降。
伴流的特点:近大远小、上大下小、左右对称。
船前进时,首部为零,自首至尾逐渐扩大,船尾最大;倒航时船尾为零。
单车单舵船,前进中突然停车,因伴流过强造成舵力极度下降,可出现无舵效现象。
(3)、螺旋桨排出流影响:因螺旋桨排出流比船速高得多,大大提高了舵叶与水的相对速度,极大地增加了舵力。
注意:双车单舵船因排出流对舵力几乎不产生作用,当船舶在靠离泊作业、船速很低时几乎没有舵效。
(4)、船舶回转中的舵力下降:船舶绕回转圈中心进行回转时,在舵叶处存在一个漂角,2576.2sin N R RP A V α=⋅⋅使水流的有效流入角减小。
船舶在回转中绕自身转心运动时,使舵叶附近的水流对舵的冲角减小。
(5)、使舵力减小的流动现象失速现象:当达失速舵角或临界舵角时,舵升力骤然下降。
船舶操纵与避碰模拟卷

船舶操纵与避碰模拟卷您的姓名: [填空题] *_________________________________1. 岛礁水域操船,应注意保持连续雷达观测和测深。
[单选题]A并减速、备锚航行(正确答案)B并减速、不备锚航行C并加速、备锚航行D并加速、不备锚航行2. 搁浅船(112m)____。
[单选题]A除应显示前后锚灯、甲板灯之外,另应显示两盏垂直环照红灯B除按同等长度船舶显示锚灯之外,另应显示两盏垂直环照红灯(正确答案)C除按同等长度船舶显示号型之外,另应外加挂垂直三个球体D除按同等长度船舶显示号型之外,另应悬挂一面“A”字旗3. 主操舵装置应能在船舶满载全速前进时,将舵自一舷度转至另一舷度,其时间不超过____秒。
[单选题]A 30, 30, 30B 35, 30. 28(正确答案)C 30, 30, 28D 35, 30, 304. 船舶系带双浮筒时,带缆程序一般应是。
[单选题]A回头缆、单头缆同时带B先回头缆,后单头缆C先单头缆后回头缆(正确答案)D根据当时具体情况而定5. 利用拖船脱浅时,需计算。
①搁浅船的损失排水量;②脱浅所需拖力;③所需拖船的功率;④脱浅时的潮高和潮时 [单选题]A①②③B①②③④(正确答案)C②③D④6. L>=50m船舶的尾灯、环照灯最小能见距离为 [单选题]A.5海里B.3海里(正确答案)C.2海里D.1海里7. 关于负责航行值班的驾驶员,下列做法正确的是。
①如有必要,毫不犹豫用车避让或避险;②避让时释放相应的声响信号;③保持安全航速 [单选题]A①②③(正确答案)B①②C①③D②③8. 在我国管辖的水域内,我国的哪种船舶可免受《国际海上避碰规则》的约束?[单选题]A政府公务船在执行公务时B从事捕鱼的船舶C我国的非机动船(正确答案)D自航式钻井平台9. 有关“号型的作用”,下列说法中错误的是。
[单选题]A表明船舶的工作胜质B能判明是否存在碰撞危险(正确答案)C判断一船的动态D判断一船的种类10. 船舶降低船速后,突然加大主机转速是提高舵效的有效途径,这是由于此时。
船舶运动学舵的设计
舵的水动力特性
PN 576.2 AR VR2 sin
FN
F
L
δ——舵角(°) L——升力(N)
D——阻力(N)
D (-)
δ
FT
S
(+)
e
b
F——舵力(N) FN——正压力(N) PT——摩擦力(N) Ad——舵叶浸水面积(m2) V ——舵叶对水速度(m/s)
舵的水动力特性计算
合权衡设计。
舵设计的基本思想
三、舵设计的考虑因素
(1)要满足操纵性要求。不同船型对操纵性的 要求是不同的,设计时也应有不同的侧重。
(2)考虑舵与船体、螺旋桨相互影响,降低航行 阻力,提高推进效率。
满足操纵性要求
不同类型的船舶对操纵性要求是不同的,设计时 应有不同的侧重。 • 远洋船一般以航向保持性为主,对回转性要 求不高。一般只限稳定性好的船,航向不容易 偏离,航向保持性也好;舵效好的船,小舵角 转首性好,也容易保持航向。如果直线稳定性 不良,不仅容易使舵工疲劳,航速降低,而且 在风浪中难以操纵。 • 沿海船和进出港频繁的海港工作船,望望对回 转性有较高的要求。 • 内河船受航道的限制应注意转首性,同时满足
舵的作用
一、推进系统的重要组成部分尾流作用
吸收尾流能量
能量增加
有机整体
提高推进效率
根涡区被填充
能耗降低
舵的作用
二、舵的控制作用
舵
控制
船舶航向
改变 保持
体现操纵性能
小舵角下的 航向稳定性
中舵角下的 航向改变性
大舵角下 的回转性
舵的作用
三、舵的鳍效应
舵
附体
产生回转阻尼
零舵角
实验五 操舵
实验五操舵实验目的:1. 掌握罗经基线与航向的关系2. 熟练掌握标准舵令。
3. 掌握不同操舵方式的转换方法和在不同水域、不同海况下的操舵方法。
要求:舵令复诵、报告声音清晰洪亮,舵令执行正确无误船舶在大洋中航行,普遍采用自动操舵装置,简称自动舵。
在进出港口、狭水道、水流湍急水域、雾天、捕鱼区等来往船舶拥挤区域,采用随动操舵。
船舶驾驶员必须熟练掌握本船舵机性能,掌握操舵技能。
一、随动操舵(follow up system)1. 开航前校对舵为了确保驾驶室舵角指示器和舵的实际角度相符及查看转舵装置是否运转正常,在开航前l小时,由值班驾驶员通知大副会同轮机长和电机员到舵机间对舵。
值班驾驶员带领舵工在驾驶室用电话和舵机间大副联系。
经舵机间内轮机长和电机员试运转后,由大副指挥校对舵。
首先通知驾驶室将舵置于0°(正舵),转左舵5°、15°、25°、35°(左满舵)按次校对,然后回舵25°、15°、5°、0°,再转右舵5°、15°、25°、35°(右满舵),最后回复到正舵。
当舵机间的舵角和驾驶室的舵角指示器相符或是在允许误差之内(电动指示的允许误差不大于±l°,机械指示的允许误差不大于±2°),即可按上述方法校对第二部舵机。
最后试应急舵机。
2. 舵令与手动操作1).舵令舵令(steering order)是由值班驾驶员飞引航员对舵工发出的有关舵角或航向的口令。
口令中有一部分是比较机械的,操舵水手只要按口令来转动舵轮就行了;另一部分是比较灵活的,操舵水手必须凭自己的经验来转动舵轮,控制船首航向,以达到口令所表明的目的。
作为发口令的人,要根据操舵水手的技术水平以及当时的实际情况,发出恰当的口令,因此驾驶人员对舵令应当非常熟悉,下达口令时要正确清楚以防听错。
模拟随动系统课程设计
模拟随动系统课程设计一、课程目标知识目标:1. 让学生掌握模拟随动系统的基本概念、原理及分类。
2. 使学生了解并掌握模拟随动系统的数学模型及分析方法。
3. 帮助学生理解模拟随动系统在实际工程中的应用。
技能目标:1. 培养学生运用数学知识和物理原理分析模拟随动系统的能力。
2. 提高学生设计简单模拟随动系统的方案,并能进行性能分析。
3. 培养学生运用现代工具(如计算机软件)进行模拟随动系统仿真的技能。
情感态度价值观目标:1. 激发学生对自动化技术的兴趣,培养其探索精神和创新意识。
2. 培养学生严谨的科学态度,使其认识到理论知识在实际工程中的重要性。
3. 增强学生的团队协作意识,提高沟通与表达能力。
课程性质分析:本课程为高年级专业课程,以理论教学为主,实践操作为辅。
课程内容具有较强的理论性和实践性,旨在培养学生的专业素养和实际操作能力。
学生特点分析:高年级学生对专业知识有一定了解,具备一定的自学能力和问题解决能力。
学生对新鲜事物充满好奇,有较强的探索欲望。
教学要求:1. 结合实际案例,注重理论与实践相结合,提高学生的实际操作能力。
2. 创设问题情境,引导学生主动思考,培养学生的创新意识和解决问题的能力。
3. 加强课堂互动,提高学生的参与度,培养学生的团队协作意识和沟通能力。
二、教学内容1. 引言:介绍模拟随动系统的概念、发展历程及在实际工程中的应用。
教材章节:第一章 模拟随动系统概述2. 基本原理:讲解模拟随动系统的工作原理、数学模型及性能指标。
教材章节:第二章 模拟随动系统的基本原理与数学模型3. 系统分类:分析不同类型的模拟随动系统及其特点。
教材章节:第三章 模拟随动系统的分类与特点4. 系统分析与设计:介绍模拟随动系统的分析方法、设计步骤及性能评估。
教材章节:第四章 模拟随动系统的分析与设计5. 实践操作:结合实际案例,进行模拟随动系统的设计与性能分析。
教材章节:第五章 模拟随动系统的实践应用6. 仿真技术:教授学生如何运用计算机软件进行模拟随动系统的仿真。
基于ARM的小型船舶自动操舵系统的设计与实现
基于ARM 的小型船舶自动操舵系统的设计与实现 0基于ARM 的小型船舶自动操舵系统的设计与实现2009年11月10日内容提要:介绍小型船舶自动舵系统的自主研发设计。
该设计选用Philips 公司的ARM LPC2214控制器、大电流MOS 管IRF9540N 、上海直川电子科技有限公司生产的ZCC04型磁罗经转换器等产品,并利用常开常闭继电器解决了手动-随动操舵转换,设计485总线接口电路解决舵角信号的传输。
某渔船试用证实,该设计可靠性高、稳定性好,节能效果明显,有望改变国内小型船舶自动舵产品基本依赖进口的局面。
关键词:船舶 自动操舵装置 手动-随动转换 舵角信号传输 设计0引言自动舵是船舶控制系统中不可缺少的重要设备。
它可以通过航向设定使船舶航迹更接近直线,避免了“蛇行”从而更节能更经济,还能节省人力资源。
我国在从70年代就开始自动舵的研究,并取得了一定的成就,但国内自动舵的研究侧重于理论方面的算法仿真,很少做出实际产品。
迄今为止,国内船舶安装的自动舵基本完全依赖进口。
因此,我们自行开发了基于ARM 的小型船舶自动舵系统,包括手动(应急)操舵、随动操舵、自动操舵三部分。
1自动舵系统的工作原理及其系统结构设计船舶自动舵时,船舶航向控制系统模型一般采用如下所示的野本模型式中:ψ是航向;δ是舵角;T 和K 是模型的参数。
T 和K ,一般表示为:T=T'·L/V 和K=K'·V/L其中:V 是船速;L 是船长;T'和K'是模型的无因次系数,是船型参数和装载状态等的函数,一般由海上实船试验获得。
[1]根据上列舵角与航向关系式,设计自动舵闭环系统结构框图,见图1。
随动操舵部分,不包括磁罗经传感器参与的外环,只包括角度传感器参与的内环,是单闭环系统。
其工作原理是:①角度传感器检测实际舵角信号;②控制器比较实际舵角信号与给定舵角信号(偏航角)得出它们的偏差;③控制器根据偏差控制电磁阀驱动电路的相应电磁阀开闭;④液压舵机改变舵的方向和角度,直至实际舵角与给定舵角信号二者偏差为零。