控制器LECSA系列 力矩模式原点回归 使用方法及操作
原点复位要领书

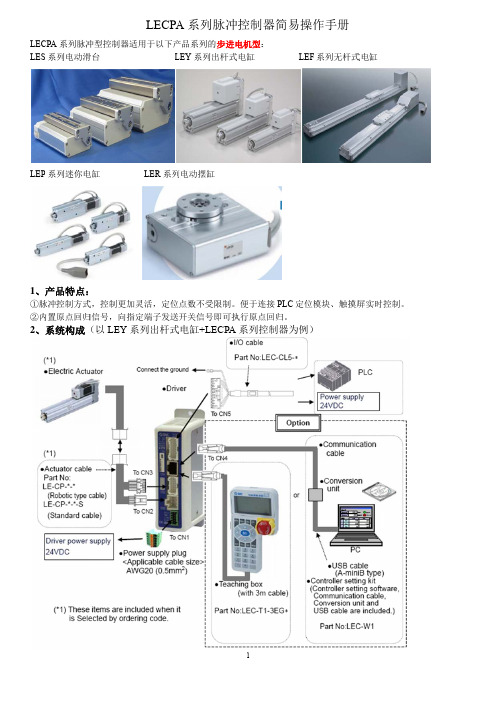
原点回归(设定)要领书适用范围:PowerMate-D的場合武汉凌达王坤2016年4月4日制作Power Mate -D 的場合1. 关闭机器电源2. 在更换电机、动力单元的情况下请确认接线端子的正确性。
3. 机器电源打开4. 按下运转准备按钮※ CRT (显示器上)会显示原点复位的警报信号,请忽略无视!5. 更换马达后的坐标轴原点如果不在机械坐标原点(红色标记处)请使用MPG 手动脉冲将其调整至与机械坐标原点重合。
※脉冲转动马达时必须转动一周以上。
※标记与机械坐标原点重合,如下所示。
6. 按下CRT (显示器上)的OFFSET 软件调用 ”SETTING (HANDY )”画面。
(注意有三个PMC ,请注意对应的PMC 上更改。
)SETTING (HANDY ) O0000 N0000PARAMETER WRIT = 0 (0:DISABLE 1:ENABLE ) TV CHEC = 0 (0:OFF 1:ON )PUNCH CODE = 1 (0:EIA 1:INCH)INPUT UNIT = 0 (0-1:CHANNEL No )S 0 T0000MDI **** **** **** 13:30:54【OFFSET 】 【SETING 】 【 】 【 】 【 OPRT 】7. 将PARAMETER WRIT = 0变更为1。
※ 100号警报将显示在屏幕上,但是请忽略。
红色箭头8.想要显示出对应的参数、请按下屏幕上软键SYSTEMSYSTEM软键按下后、PARAMATER设置画面将调出、若画面没有显示对应的画面,请按屏幕下方的软键进行翻页PARAMETER(SETTING)O0000N00001815APC APZ軸名称00100000軸名称00100000S0T0000MDI************13:32:04【PARAM】【DGNOS】【PMC】【SYSTEM】【OPRT】9.对于要进行原点回归的轴的APZ(4Bit目)参数输入设置成1。
台达运动控制卡系统35种原点回归模式详解
台达运动控制卡系统35种原点回归模式详解一,原点回归软件接口函数原点回归的软件接口函数有3条,_DMC_01_set_home_config指令负责配置原点回归的参数,需要传入的参数如下:_DMC_01_set_home_config(U16 CardNo,U16 NodeID,U16 SlotID ,U16 Mode,I32 offset,U16 lowSpeed,U16 highSpeed,F64 acc)//CardNo是运动轴所属的轴卡卡号。
//NodeID是运动轴的站号。
//SlotID是运动轴的端口号。
//Mode是原点回归模式编号,对应1~35。
//offset是针对参考点的偏移量,单位是脉冲数。
//lowSpeed是运动轴寻找原点的速度,单位是1~500转每分。
//highSpeed是运动轴寻找参考点的速度,单位是1~2000转每分。
//acc是运动轴从零速度提高到最大速的加速时间,单位秒。
在原点回归参数配置完成后,_DMC_01_set_home_move指令负责启动原点回归的动作,需要传入的参数如下:_DMC_01_set_home_move(U16 CardNo, U16 NodeID, U16 SlotID)//CardNo是运动轴所属的轴卡卡号。
//NodeID是运动轴的站号。
//SlotID是运动轴的端口号。
如在原点回归过程中,有某些特殊情况发生,需要停止回原点,则可以执行指令_DMC_01_escape_home_move,需要传入的参数如下:_DMC_01_escape_home_move(U16 CardNo, U16 NodeID, U16 SlotID)//CardNo是运动轴所属的轴卡卡号。
//NodeID是运动轴的站号。
//SlotID是运动轴的端口号。
二,原点回归35种模式通过_DMC_01_set_home_config指令的Mode参数,可以根据设备需求,选用35中原点回归模式中的一种。
LECA6 最新官方中文操作手册

14.1. 设计注意事项 ..................................... 54 14.2.安装 ............................................. 55 14.3. 使用注意事项 ..................................... 56 14.4. 使用环境 ......................................... 57 14.5. 维护检查的注意事项 ............................... 58 14.6. 带锁执行器的注意事项 ............................. 58
目录
1. 安全注意事项 ............................. 4
2. 产品概要 ................................. 6
2.1. 产品特点 ............................................ 6 2.2.型号表示方法 ......................................... 7 2.3 产品构成 ............................................. 8 2.4 步骤(直到执行器动作为止) ............................. 9
(1) 推压动作成功时 .................................. 35 (2) 推压动作失败时(空振) ............................ 35 (3) 推压动作结束后工件移动的场合 .................... 35 8.4 对于控制器的输入信号的响应时间 ...................... 36 8.5 关于运行中的中断方法 ................................ 36
自动回原点的功能要求
杭州日鼎控制技术有限公司
自动回原点的功能要求
2014-6-26
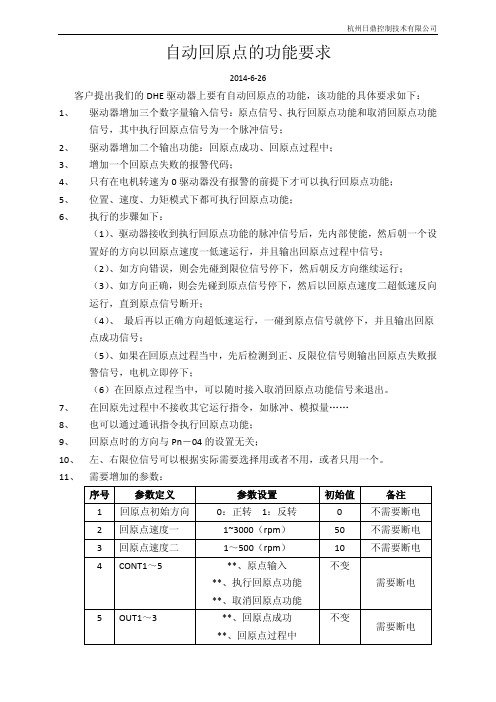
客户提出我们的DHE驱动器上要有自动回原点的功能,该功能的具体要求如下:1、驱动器增加三个数字量输入信号:原点信号、执行回原点功能和取消回原点功能
信号,其中执行回原点信号为一个脉冲信号;
2、驱动器增加二个输出功能:回原点成功、回原点过程中;
3、增加一个回原点失败的报警代码;
4、只有在电机转速为0驱动器没有报警的前提下才可以执行回原点功能;
5、位置、速度、力矩模式下都可执行回原点功能;
6、执行的步骤如下:
(1)、驱动器接收到执行回原点功能的脉冲信号后,先内部使能,然后朝一个设置好的方向以回原点速度一低速运行,并且输出回原点过程中信号;
(2)、如方向错误,则会先碰到限位信号停下,然后朝反方向继续运行;
(3)、如方向正确,则会先碰到原点信号停下,然后以回原点速度二超低速反向运行,直到原点信号断开;
(4)、最后再以正确方向超低速运行,一碰到原点信号就停下,并且输出回原点成功信号;
(5)、如果在回原点过程当中,先后检测到正、反限位信号则输出回原点失败报警信号,电机立即停下;
(6)在回原点过程当中,可以随时接入取消回原点功能信号来退出。
7、在回原先过程中不接收其它运行指令,如脉冲、模拟量……
8、也可以通过通讯指令执行回原点功能;
9、回原点时的方向与Pn-04的设置无关;
10、左、右限位信号可以根据实际需要选择用或者不用,或者只用一个。
11、需要增加的参数:。
力矩设定器使用方法

力矩设定器使用方法
一.力矩设定器的链接方法见下图:
二.力矩设定器的调试步骤
1.按上图将设定器与控制器和PAS模块链接;控制器与电机、电池连接。
2.打开电源,设定器中间三个LED灯亮,按下设定器任意一个按钮,设定器进入设定状态,
LED灯显示由左侧亮起,每按一次¡+¡键增加一档力矩,按两次LED增加一格,;按¡-¡键为减小力矩,并存储该值。
3.速度调节在设定器底座下方有一个小孔,通过小孔内小电位器调整。
(调整范围1V-3V)
4.停止设定3秒后自动进入工作状态,设定器中间三个LED灯亮,PAS模块存储了上述设定。
5.对于使用有变速功能的车型,可将变速器挂在第一挡轻骑感受加力大小是否满意来确定。
6.设定器自动保留最后的设定参数。
三.力矩设定器出线功能见下图:
右侧插座自上而下分别接:PAS模块三芯、四芯以及控制器四芯
四.新设定器的优点:
1.无需使用电压表看设定值,操作更加便捷。
2.用按键代替了微调电位器,省去用螺丝刀。
3.自动复位到工作状态,减少操作。
4.速度调节为不常用功能,因此弱化。
运动控制器“原点返回”的14种模式及参数说明
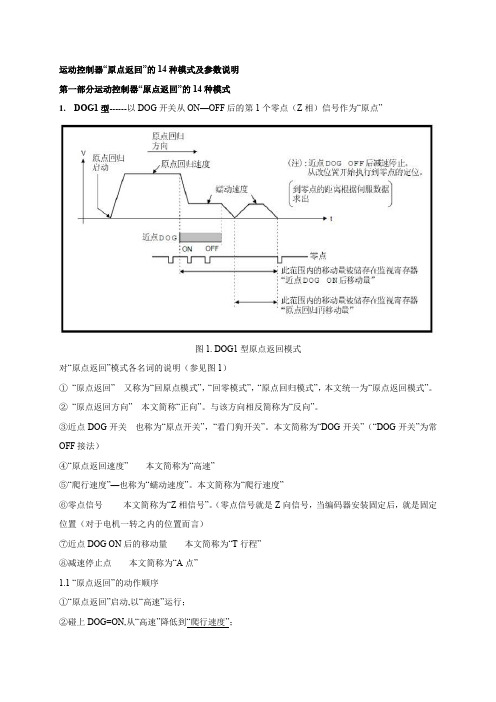
运动控制器“原点返回”的14种模式及参数说明第一部分运动控制器“原点返回”的14种模式1.DOG1型------以DOG开关从ON—OFF 后的第1个零点(Z相)信号作为“原点”图1. DOG1型原点返回模式对“原点返回”模式各名词的说明(参见图1)①“原点返回”---又称为“回原点模式”,“回零模式”,“原点回归模式”,本文统一为“原点返回模式”。
②“原点返回方向”---本文简称“正向”。
与该方向相反简称为“反向”。
③近点DOG开关---也称为“原点开关”,“看门狗开关”。
本文简称为“DOG开关”(“DOG开关”为常OFF接法)④“原点返回速度”------本文简称为“高速”⑤“爬行速度”—也称为“蠕动速度”。
本文简称为“爬行速度”⑥零点信号-------本文简称为“Z相信号”。
(零点信号就是Z向信号,当编码器安装固定后,就是固定位置(对于电机一转之内的位置而言)⑦近点DOG ON后的移动量------本文简称为“T行程”⑧减速停止点------本文简称为“A点”1.1 “原点返回”的动作顺序①“原点返回”启动,以“高速”运行;②碰上DOG=ON,从“高速”降低到“爬行速度”;③当DOG从ON---OFF,从“爬行速度”减速停止,速度降为零。
又从“零速”上升到“爬行速度”,当检测到第1个“Z相信号”时,该“Z相信号”位置就是“原点”。
同时该轴停止在原点位置上。
(从“减速停止点A”到“Z相)信号”点是定位过程,所以能够精确定位)1.2 “原点返回”不能正常执行的原因(1)从“原点返回启动位置”到“减速停止点A”这一区间内如果没有经过“Z相信号”点一次,(Z相通过信号M2406+20N),系统会产生报警(ZCT)并减速停止。
(ZCT)(错误代码120). “原点返回”不能正常执行。
(这种情况是“原点返回启动位置”到“DOG”距离很短。
走完DOG的行程还没经过“Z相信号”,系统无法识别“Z相信号”位置。
LECSA控制器简易说明书
F171(SPDH)脉冲输出控制 (原点返回控制: 带通道指 定)
F172(PLSH)脉冲输出控制 (JOG控制: 带通道指定)
原理与FP0基本相同,可参 考《FP系列编程手册》 比对FP0的F168、F169 进行学习。
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
谢谢!
6.1节 3.1节、3.3节
显示3位,7段LED显示伺服状态和报警号码
第5章
操作部分,进行状态显示、诊断、报警、参数的操 作
第5章
输入输出信号用接头(CN1),连接数字输入输出信号 3.2节、3.4节
USB通信连接,连接个人电脑
11.4节
编码器用接头(CN2),伺服电机编码器连接接头 3.4节、11.1节
PLC
伺服控制器
电机
LECSA
(交流伺服)
PLC编程控制(松下仅供参考)
输出方式
●CW/CCW输出方式
脉冲输出功能
●Pulse/Sign输出方式 (正转OFF/反转ON)
●Pulse/Sign输出方式 (正转ON/反转OFF)
PLC编程控制(松下仅供参考)
FP-X 系列
20KHz × 2轴 100KHz × 2轴
目标值<当 前值
从CW输出
从CCW输 出
PLS+SIGN 正转OFF/反转
ON
方向输出OFF 脉冲输出
LECPA 步进脉冲制器 中文简易操作手册
4-3 CN5 端口-控制 I/O 接口 配线图(NPN 型)
脉冲输入电路:
线号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
线色 茶/黑 1 茶/红 1 黄/黑 1 黄/红 1 浅绿/黑 1 浅绿/红 1 灰/黑 1 灰/红 1 白/黑 1 白/红 1 茶/黑 2 茶/红 2 黄/黑 2 黄/红 2 浅绿/黑 2 浅绿/红 2 灰/黑 2 灰/红 2 白/黑 2 白/红 2
5V DC±10% 390Ω±5%(0.1W 以上)
注:集电极开路式脉冲输入用
CN5 端口各信号详细规格请参见最后附录部分。
4
集电极开路输入 2 脉冲型 集开电路极集开电路极输入 1 脉冲型
控制信号详解-输入部分:
线号 名称
说明
1 COM+ DC24V 正
2 COM- DC24V 负
3
NP+
4
NP-
②点击“设备管理器”查看系统分配给 LEC 系列控制器的端口编号(例:COM4),记录下来。
注意:如果在“设备管理器”下面的“端口(COM&LPT)”一栏下没有发现 SMC 产品项及端口号,请检查“设备管 理器”界面下的“端口(COM&LPT)”及“通用总线 串行控制器”两项中有无黄色问号项 ,如果有,则驱动未能完全 安装。请在黄色问号项上点击右键并选择“更细驱动 程序”,并将安装路径指向安装源文 件存储位置,完成后黄色问 号消失,产品可正常使用。
定位动作完成
OFF ON ON ON
原点回归完成/SVON 为 OFF
OFF OFF OFF OFF
执行器在原点/EMG 为 OFF
OFF OFF OFF OFF
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
PLC编程控制(松下仅供参考)
PLC程序(针对SMC电缸)
谢谢!
控制器LECSA简易说明
SMC(China)Co.,Ltd.
概要
软件安装 系统构成 配线 选型 端口说明 参数设定 PLC编程
设定软件的安装
软件版本:SETUP221E,C4以上。 安装方法:先安装SETUP221E,然后安装c4的升 级包。
LECSA系统构成及配线
详细接线
端口说明
名称/用途 详细说明
编号 主电路电源接头(CNP1),连接输入电源,回生电阻、 3.1节、3.3节 电机、地线 充电灯。主电路中存在电荷时,灯亮灯亮时不能进 行电线的连接或更换等 铭牌 1.5节
一触式调节按钮(AUTO)按下此按钮执行一触式的 6.1节 调整 控制电路的电源连接器(CNP2),控制电路的电源 连接。 3.1节、3.3节 显示3位,7段LED显示伺服状态和报警号码
第5章
操作部分,进行状态显示、诊断、报警、参数的操 作
第5章
输入输出信号用接头(CN1),连接数字输入输出信号 3.2节、3.4节 USB通信连接,连接个人电脑 编码器用接头(CN2),伺服电机编码器连接接头 11.4节 3.4节、11.1节
LECS系列选型
编程线
型号:LEC-MR-J3USB
最大输 出频率
相关指令
F0(MV) F1(DMV)
Y0
Y1
X4
R911C
DT90348 DT90349 DT90352
DT90350 DT90351 DT90354 DT90355 DT90358 DT90369 DT90362 DT90363 1CH:20kHz 2CH:20kHz 1CH:100kHz 2CH:100kHz
脉冲方向与滑台移动方向对应关系。
电机的电子齿轮比在此处设定
脉冲形式的选择
选择脉冲串输入 信号的输入形式 。指令脉冲有3种 输入形式,可以 选择正逻辑・负 逻辑。 表中的 或 的 箭头表示读取脉 冲串的时间点。A ・B相脉冲串乘以 4倍后被读入。
电子齿轮比设定
16为电机的导程,对应的一 个脉冲走0.01mm。 此处可根据自己需要设置。
PLC编程控制例(松下仅供参考)
PLC实现位置控制
PLC
伺服控制器 LECSA
电机 (交流伺服)
PLC编程控制(松下仅供参考)
输出方式
●CW/CCW输出方式
脉冲输出功能
●Pulse/Sign输出方式 (正转OFF/反转ON)
●Pulse/Sign输出方式 (正转ON/反转OFF)
PLC编程控制(松下仅供参考)
Y6
Y7
X7
R911F
DT90360
DT90361
DT90362
DT90363
PLC编程控制(松下仅供参考)
动作模式
增量<相对值控制>
CW/CCW PLS+SIGN 正转OFF/反转 ON 方向输出OFF 脉冲输出 方向输出ON 脉冲输出 PLS+SIGN 正转ON/反转 OFF 方向输出ON 脉冲输出 方向输出OFF 脉冲输出 高速计数器 过程值 加法 减法
MR-Configurator 参数设定
后续控制: 1-上电后CN1的4号线LOP信号为OFF时,LECSA为力矩模式。 此时给CN1的6号线RS2置ON可使电缸滑台反向移动, 给CN1 的7号线RS1置ON可使电缸滑台正向移动, 2-滑台移动到行程末端或机械限位时,其速度变为0,此时 CN1的12号线输出信号VLC由ON变为OFF, 3-LOP置ON切换到位置模式,给脉冲使滑台反向移动一定距 离(推荐2mm以上),给CN1的5号线CR信号,脉冲清0,当 前点为原点。
正值时 负值时
从CW输出 从CCW输 出
绝对<绝对值控制>
CW/CCW PLS+SIGN 正转OFF/反转 ON PLS+SIGN 正转ON/反转 OFF 高速计数器 过程值
目标值>当前 值
目标值<当 前值
从CW输出
从CCW输 出
方向输出OFF 脉冲输出
方向输出ON 脉冲输出
方向输出ON 脉冲输出
方向输出OFF 脉冲输出
控制信号接线实例
MR-Configurator 参数设定
红色on 显示已 经连上控制器 在system setting 中 选择JN系列电机
MR-Configurator 参数设定
在basic setting 中选择转矩/ 定位模式 脉冲类型在 此设定(参 见下页)
最高接收脉冲频率: 请根据需要选择,注意!频率越高抗干扰越差 。
MR-Configurator 参数设定
PD05,PD06均设置为1010,将CN1端口4 号线定义为LOP(转矩/位置控制切换) 信号输入,当在T/P模式下的时候off为 力矩控制,on为位置控制。 (CN1的4号线未定以前为SON信号)
PD18修改为0007,将CN1的12号线定义为 VLC信号(速度限制中),此信号在力矩 模式运行时为on,电机停止时为off。 ( CN1的12号线未定义前为MBR信号。)
F171(SPDH) F172(PLSH) F174(SP0H) F175(SPSH)
Y2
Y3
X5
R911D DT90353
Y4
Y5
X6
R911E
DT90356 DT90367 DT90360 DT90361
Y6
Y7
X7 DT90052 <bit4>
R911F
X轴
Y0
Y1
X4
R911C
DT90348
加法
减法
PLC编程控制(松下仅供参考)
PLC编程控制(松下仅供参考)
PLC编程控制(松下仅供参考)
另外, FPΣ中的以下两条 指令 F171(SPDH)脉冲输出控制 (原点返回控制: 带通道指 定) F172(PLSH)脉冲输出控制 (JOG控制: 带通道指定) 原理与FP0基本相同,可参 考《FP系列编程手册》 比对FP0的F168、F169 进行学习。
DT90389 DT90352
DT90350
DT90351 DT90354 合成速度 100kHz
ቤተ መጻሕፍቲ ባይዱ
高速CH0
Y轴 直线插补 Y2 Y3 X5 R911D
DT90353
DT90356 DT90357
DT90355
DT90358 DT90359 合成速度 20kHz
X轴
中速CH2 Y轴
Y4
Y5
X6
R911E
FP-X 系列
20KHz × 2轴 100KHz × 2轴
PLC编程控制(松下仅供参考)
FP-X 脉冲输出功能一览表
使用的输入/输出接点编号 使用的存储区域
控制中标志 过程值区域 目标值区域
通道(No.)
CH0 高速 CH1 独立 CH2 中速 CH3
CW或Pulse CCW或Sign 原点输入 近原点输入 输出 输出
MR-Configurator 参数设定
力矩模式下原点回归时的速度。(不宜过大,会 导致端点碰撞剧烈,允许范围内越小越好。)
力矩模式下原点回归时电机的输出扭矩限制。 (不宜过大,会导致端点碰撞剧烈,允许范围 内越小越好。)
MR-Configurator 参数设定
PD01可以将不想占用PLC点的信号在上电后 自动置ON。例如:设置为0025时,SON、 MD0、EM1信号自动置为ON。(参见P33)