水下定位与导航共97页
导航与定位系统
通常将水下机器人的导航分为水面导航和水下导航两部分。
前者通常由水面母船来完成,即确定母船相对于地球坐标的位置;而水下导航则往往是相对于水面母船而言,将母船作为一个水面方位点来确定潜水器的水下相对位置。
水下机器人水下导航还可以划分为一般导航和终端导航。
一般导航是把水下机器人引导到目标附近。
终端导航是接近目标之后,能使潜水器的视野触及到局部感兴趣的海底和搜索目标。
由于电磁波在海水中的衰减十分迅速,10KHZ的电磁波每米衰减达3dB,这使所有无线电导航和雷达都无法在深海航行中使用,同时由于海水的低能见度和缺少海底的详细地形资料,近海导航常用的岸标或航标定位以及天文定位也会失效。
此外,由于潜水器经常活动在失事舰船或海底井口和油气管道附近,在这类地区,海底磁场亦经常出现异常,磁罗经的工作往往受到干扰。
因此,目前潜水器水下导航最有效的方法是推算导航和水声导航。
推算导航推算导航是根据已知的航位及水下机器人的航向、速度、时间和漂移来推算出新的航位。
它需要实时测得水下机器人的航向和速度,罗泾和计程仪是推算导航的基本设备。
罗泾是一种提供方向基准的导航仪器,它用于测定航向;计程仪用来测定航速和航程。
推算导航无需借助其他参考基准就能独立完成导航任务,设备极为简单,作为一种导航手段,占有一定的地位。
但由于测速仪器有较大的误差并受到水流等因素的影响,使得推算导航的积累误差随时间而不断增加,所以捍卫的推算不可能非常精确,实际上这是一种近似的方法,如有可能应随时间加以修正。
1.航向测定推算导航中用于航向测定的仪器主要磁罗经、电罗泾、方向陀螺仪。
磁罗经的优点是结构简单、可靠且不用电源。
但是它对当地的净磁场会有反应,故在罗泾附近的金属体、磁性体甚至仪器仪表等都可能会影响磁罗经的读数。
水下机器人体积小,磁罗经不可能远离上述物体,则水下机器人一般不用磁罗经。
方向陀螺可以指示出所需要的方向,在该方向上维持一段时间,有提供短期航向基准的功能,并且体积小、重量轻。
自主水下航行器导航与定位技术

自主水下航行器导航与定位技术发布时间:2023-02-03T02:36:04.888Z 来源:《科学与技术》2022年第18期作者:杜晓海[导读] 自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,杜晓海海军装备部 710065摘要:自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,在执行任务时需要准确的定位信息。
现有AUV主要采用基于捷联惯性导航系统(SINS),辅以声学导航和地球物理场匹配导航技术。
本文简要介绍了水下导航模式的基本原理、优缺点和适用场景;讨论了各种导航模式中的关键技术,以提高组合导航的精度和稳定性。
通过分析现阶段存在的问题,展望了水下航行的未来发展趋势。
关键词:自主水下航行器;智能导航;智能定位本文综述了目前主流的AUV水下导航关键技术,包括DVL测速技术、LBL/SBL/USBL水声定位导航技术、地形辅助导航技术、地磁辅助导航技术和重力辅助导航技术以及协同导航技术,介绍了相关导航技术的基本原理和发展,分析和总结了水下自主导航中各技术的关键问题和技术难点,最后展望了AUV水下导航技术的未来发展。
1 SINS/DVL定位技术DVL是一种利用声波多普勒效应测量载流子速度的导航仪器。
根据AUV与水底之间的相对距离,DVL有两种模式:水底跟踪和水底跟踪。
当载流子与水底的相对距离在该范围内时,声波可以到达水底,当AUV与水底之间的相对距离超过范围时,声波无法到达水底,DVL采用水跟踪模式。
根据传输波速的多少,可以分为单波束、双波束和四波束。
1.1 SINS/DVL对准技术惯性导航可以为AUV提供实时的姿态、速度、位置等导航信息。
然而,初始对准必须在使用前进行,初始对准的结果在很大程度上决定了最终的集成精度。
通常,AUV在停泊或航行于水面时接收GPS信号进行初始对准。
在特定的任务背景下,AUV需要在水下运动期间完成初始对准,因此,许多学者提出了基于DVL辅助的移动基站对准。
水声定位导航概述

1 传统的导航手段 (1)路标导航 路标导航是利用罗经、测距仪及六分仪测定路 标的方位(船与路标连线与船舶所在子午线的夹 角)、距离或水平夹角等决定船舶位置的导航过 程。 (2)天文导航 天文导航是利用六分仪测定天空中具有一定 规律的天体(星、太阳、月亮)决定船舶位置进 行导航的过程。 (3)传统导航手段的特点 传统的导航手段只能在天气良好的条件下, 物标或天体的能见度良好时才能适用,而且观测 繁杂、速度慢、精度差。
8.4 水声定位与导航技术简介
水声定位与导航技术大体分为三类:水声定位技术、载 体声学测速技术和海底地形地貌测量技术。 8.4.1 水声定位系统 水声定位系统主要指可用于局部区域精确定位与导航的 系统。水声定位系统分为:长基线系统、短基线系统和超 短基线系统。 水声定位系统都有多个基元(接收器或应答器),这些 基元间的连线成为基线。
8.1 定位与导航概述
1 什么是定位与导航 定位与导航可以简单归结为怎样回答下面三个 问题: (1)我在什么地方?(2)我要到哪去?(3) 我怎样去那里?回答这三个问题必须要有一个参 照,也就是一个坐标系统,如以国家大地基准、 WGS-84坐标系统等为参考来回答这三个问题。 2 绝对定位与相对定位 海洋空间定位分为绝对定位和相对定位。以 国家大地基准、ITRF或WGS-84为参考的定位称 为绝对定位,如国家领海的划分等。小范围的海 洋活动需采用相对定位,如寻找石油井口或打捞 沉船等。
定量描述声波传播一定距离后声强度的衰 减变化:
I1 TL 10lg Ir
声纳参数
目标强度TS
定量描述目标反射本领的大小 :
Ir TS 10 lg Ii
Q
C
目 标
r 1
P
Ir
1m
《水下定位与导航技术》声学多普勒测速技术概述

fdfd I fdI I4 C vxfTco c so sv vx zsi n
在船舶无摇摆及上下起伏时
前后两波束接收信号的频差为
fd
r
4vx C
fT cos
相对频率测量误差
fd fdfdrco svzsi n 1
fd r
fd r
vx
浅水使用时 收发期间只 需测量一次
姿态角
例如当 5和 10时,将分别带来 0.3%和 1.5%的测量误差。
计算法定位导航设备
机械式导航设备:水压式测速计、拖曳式旋转流量计等。 电子式导航设备:电磁计程仪、声多普勒计程仪和声相关
计程仪。
5.1 引言
多普勒现象 目标与声源的相对运动(相向、相离) 声源和接收一体的情况
多普勒速度解算公式 舰船的测速原理、方法 测速误差产生的原因
影响多普勒测速的主要因素及改进方法
在相向运动时,脉冲被压缩;在相离运动时,脉冲被展宽。
5.2 舰船多普勒测速原詹纳斯理(Janus)配置
舰船多普勒测速原理
xv/C
船与被照射 vvxcos
区的相对径 向速度为 :
x vx cos
C
fd
I
2vx C
fT cos
接收的回波 1x (1x)2
信号频率为:fr
1x
fT
1x2
fT
fdII2Cvx fTcos
若其往返时间为t2,在t2时间内目标又向声呐靠近 vt2 / 2 。
因此有 L12v2tvT12C2t
由此得到后沿的往返时间为
xv/c
t2
2L/C2xT 1x
5.2 舰船多普勒测速原理
多普勒效应的时域分析 换能器接收到的脉冲宽度
海洋导航定位技术及其应用与展望

第26卷第1期2006年1月 海 洋 测 绘HY DROGRAPH I C S URVEYI N G AND CHARTI N GVol 126,No 11Jan 1,2006收稿日期:2005208202;修回日期:2005210213基金项目:国家自然科学基金资助项目(40506023);“基础地理信息与数字化技术”山东省重点开放实验室资助项目(S D040212)。
作者简介:阳凡林(19742),男,湖北荆州人,博士,副教授,主要从事海洋测绘、GPS 理论与应用及其数据处理等研究。
海洋导航定位技术及其应用与展望阳凡林1,2,康志忠2,独知行2,赵建虎3,吴自银1(11国家海洋局第二海洋研究所,浙江杭州 310012;21山东科技大学地球信息科学与工程学院,山东青岛 266510;31武汉大学测绘学院,湖北武汉 430079) 摘要:根据水上和水下环境的区别,系统论述了各种海洋定位导航技术及组合定位导航技术,比较了它们的优缺点和适用范围,介绍了它们的应用现状及展望。
关键词:海洋测量定位;卫星导航;惯性导航;组合导航中图分类号:P22811 文献标识码:B 文章编号:167123044(2006)01200712041 引 言随着陆上定位与导航技术的飞速发展,海洋定位与导航技术也相应得到了长足的发展,精度越来越高,应用越来越广泛。
由于海洋环境的特殊性,其定位和导航与陆上相比,具有动态性、不可重复性等特点,使得定位精度比陆上低、系统也较陆上复杂。
根据定位和导航条件的不同,可分为水上和水下两种方式。
对于船载的测深成像等系统,为了将最终信息转换到地理坐标系中,必须获得测深成像瞬间的测船姿态和位置;对于在水下作为载体的拖鱼,同样也需采用高精度定位以获得海底三维信息。
能否接收空中电磁波信号(如GPS 信号)是这两种方式的根本区别。
下面从这两方面入手,详细论述海洋定位和导航的特点、技术和综合应用。
2 水上定位与导航技术水上定位与导航技术是指在海面上进行的定位和导航。
我国首套水下GPS高精度定位导航系统简介
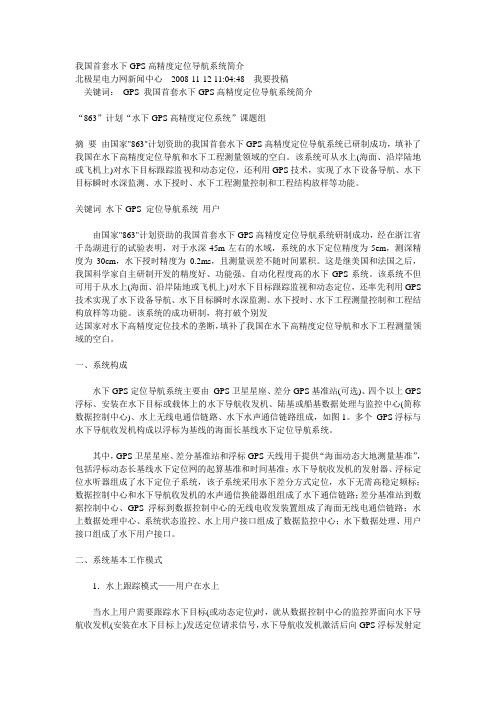
我国首套水下GPS高精度定位导航系统简介北极星电力网新闻中心2008-11-12 11:04:48 我要投稿关键词:GPS 我国首套水下GPS高精度定位导航系统简介“863”计划“水下GPS高精度定位系统”课题组摘要由国家"863"计划资助的我国首套水下GPS高精度定位导航系统已研制成功,填补了我国在水下高精度定位导航和水下工程测量领域的空白。
该系统可从水上(海面、沿岸陆地或飞机上)对水下目标跟踪监视和动态定位,还利用GPS技术,实现了水下设备导航、水下目标瞬时水深监测、水下授时、水下工程测量控制和工程结构放样等功能。
关键词水下GPS 定位导航系统用户由国家"863"计划资助的我国首套水下GPS高精度定位导航系统研制成功,经在浙江省千岛湖进行的试验表明,对于水深45m左右的水域,系统的水下定位精度为5em,测深精度为30cm,水下授时精度为0.2ms,且测量误差不随时间累积。
这是继美国和法国之后,我国科学家自主研制开发的精度好、功能强、自动化程度高的水下GPS系统。
该系统不但可用于从水上(海面、沿岸陆地或飞机上)对水下目标跟踪监视和动态定位,还率先利用GPS 技术实现了水下设备导航、水下目标瞬时水深监测、水下授时、水下工程测量控制和工程结构放样等功能。
该系统的成功研制,将打破个别发达国家对水下高精度定位技术的垄断,填补了我国在水下高精度定位导航和水下工程测量领域的空白。
一、系统构成水下GPS定位导航系统主要由GPS卫星星座、差分GPS基准站(可选)、四个以上GPS 浮标、安装在水下目标或载体上的水下导航收发机、陆基或船基数据处理与监控中心(简称数据控制中心)、水上无线电通信链路、水下水声通信链路组成,如图1。
多个GPS浮标与水下导航收发机构成以浮标为基线的海面长基线水下定位导航系统。
其中,GPS卫星星座、差分基准站和浮标GPS天线用于提供“海面动态大地测量基准”,包括浮标动态长基线水下定位网的起算基准和时间基准;水下导航收发机的发射器、浮标定位水听器组成了水下定位子系统,该子系统采用水下差分方式定位,水下无需高稳定频标;数据控制中心和水下导航收发机的水声通信换能器组组成了水下通信链路;差分基准站到数据控制中心、GPS浮标到数据控制中心的无线电收发装置组成了海面无线电通信链路;水上数据处理中心、系统状态监控、水上用户接口组成了数据监控中心;水下数据处理、用户接口组成了水下用户接口。
水下定位与导航技术声学多普勒测速技术概述
f dII
2vx C
fT cos
多普勒频(1移 2x)
fT
fT
1
2vx C
cos
fd
f dI
f dII
4vx C
fT cos
为:
f dx
fr
fT
2xfT
2vx C
fT cos
水平速度 :
C
vx 2 fT cos
f dx
5
vx
4
Cf d
fT cos
第6页/共78页
5.2 舰船多普勒测速原理
• 舰船多普勒测速原理 • 十字形配置和X形配置
詹纳斯(Janus)配置
船首尾线方向
船首尾线方向
6
前第后左7页右形/共配7置8页
X形波束配置
5.3 影响多普勒测速的主要因素及改 进方法
• 由解算公式近似引起的误差 • 船舶摇摆引起的测速误差及摇摆补偿 • 传播声速引起的测速误差 • 有限波束宽度的影响 • 噪声对频率测量的影响 • 安装角度偏离误差及其校正
由此得到后沿的往返时间为
x v/c
t2
2L / C 2xT 1 x
3
第4页/共78页
5.2 舰船多普勒测速原理
• 多普勒效应的时域分析 • 换能器接收到的脉冲宽度
2L / C 2L / C t1 1 v / C 1 x
前
后
沿
所需往返
t1 t2
时间不同
2xT
,其差值是
t2
2L / C 2xT 1 x
• 由解算公式近似引起的误差 • 船舶摇摆引起的测速误差及摇摆补偿 • 传播声速引起的测速误差 • 有限波束宽度的影响 • 噪声对频率测量的影响 • 安装角度偏离误差及其校正
水下机器人的定位和导航辅助系统
自主水下航行器导航与定位技术
Value Engineering0引言众所周知,海洋所蕴含的自然资源是地球上最丰富的但同时也是人类目前探索最少的地方。
随着人类在利用海洋和开发海洋上的投入不断增大,自主水下航行器(AUV)引起了越来越多的关注[1],特别是在海洋石油勘探开发领域得到了快速发展。
AUV是能够在水下自主航行、自动控制、并能按照程序预先规划路径自主完成预定任务的水下集成系统。
导航定位技术是AUV的关键技术之一,高精度水下导航定位技术对AUV的安全航行和高效率完成任务具有决定性的作用。
由于无线电信号在水中迅速衰减,AUV无法借助无线电导航系统实现水下远距离、大范围的准确定位,卫星导航定位系统在水下不可用是AUV水下导航定位面临的主要技术挑战之一。
在不使用声学基线定位系统的情况下,AUV在水下主要依靠自身搭载的罗经、多普勒计程仪(Doppler Velocity Logger,DVL)或惯性导航系统提供的各类导航信息,通过航位推算模式实现水下导航定位。
惯性导航/航位推算方法精度受传感器本身测量精度影响,会随时间迅速积累。
在DVL锁定海底并且能够提供有效对地速度辅助导航的情况下,惯性导航/航位推算的导航误差一般为航行距离的0.5-2%,如果使用高精度的惯性导航设备,导航误差能够优于航行距离的0.1%。
当在水面时,AUV可以通过GNSS(Global Navigation Satellite System)获得的绝对位置来实时修正惯性导航系统误差。
但是定时上浮接收GNSS信号来实现对惯性导航误差的校正在实际应用过程中往往是不现实的,尤其在深水调查作业中。
在过去的二十年间,AUV水下导航定位技术研究取得了实质性的进展。
以视觉导航和地磁匹配导航技术为代表的非传统导航方式逐步开始在水下导航中得到应用,并取得了一定的成果。
除此之外,用于解决机器人导航定位的同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)算法技术日渐成熟,在水下导航定位方面的应用研究也取得了一定的理论和实践成果[2]。
第4章_长基线水声定位系统(LBL)
问答机在t3时 刻接收到T的 应答信号
T1
F4 F3
T5 t1
F2 间隔 t3
T3
F3
t3 2T1
T3 t 2 t3 T1
15
R3 cT3
2014-11-14
海底应答器阵的校准
校准的目的:布放应答器时有误差≠GPS的数据。
本节提到的校准方法,即测量应答器的相对坐标,可以没有 GPS数据,在有GPS数据后可以得到应答器的绝对坐标,还 使校准方法简单化,可以绕着应答器航行,可以利用超短基线 +GPS初步确定应答器的位置,在通过解斜距方程,精确确 定应答器的位置。
3
2014-11-14
引言
组成结构及原理
浮标形式的长基线系统
长基线系统的基元也可以是水 面无线电浮标。此时被定位的 目标上装有同步或非同步声信 标,诸基元接收的声信号需调 制为无线电信号发到一只母船 上进行处理,从而完成水下目 标的定位。由于无线电浮标在 海面上不固定,因此必须利用 装载其上的GPS接收机定时地 测定自身位置,与定位信号一 起发至母船。
FSS发出讯问信号(F2), 母船接收时刻为t1; 在间隔 △ t3 时间后, FSS 发 出讯问信号(F3),应答器 接收,并回答(F4),母船 接收时刻为t2; 问答器发出讯问信号(F3), 应答器回答(F4),母船接 收时刻为t3;
14
F4
T3
F3t1 T5源自t 2 t3 T3 T1
log(sin A1 ) log(sin A3 ) log(sin A5 ) log(sin A7 ) log(sin A2 ) log(sin A4 ) log(sin A6 ) log(sin A8 ) 0