交流伺服系统常见故障及处理
交流伺服电机常见故障
交流伺服电机常见故障交流伺服系统包括:伺服驱动器、伺服电机和一个反馈传感器(一般伺服电机自带光电编码器)。
所有这些部件都在一个控制闭环系统中运行;驱动器从外部接收参数信息,然后将一定电流输送给电机,通过电机转换成扭矩带动负载,负载根据自己的特性进行动作或加减速,传感器测量负载的位置,使驱动装置对设定信息值和实际位置值进行比较,然后通过改变电机电流使实际位置值和设定信息值保持一致,当负载突然变化引起速度变化时,编码器获知这种速度变化后会马上反应给伺服驱动器,驱动器又通过改变提供给伺服电机的电流值来满足负载的变化,并重新返回到设定的速度。
交流伺服系统是一个响应非常高的全闭环系统,负载波动和速度矫正之间的时间滞后响应是非常快的。
二、交流伺服电机振动故障分析以下对交流伺服电机振动故障的分析主要从机械方面和电气方面进行。
1. 机械方面(1)电机两端和丝杠轴承座上的轴承磨损后间隙过大,或者轴承缺少润滑脂后轴承滚动体和保持架磨损严重造成负载过重。
轴承磨损后间隙过大会造成电机转子中心和丝杠中心存在同轴度误差,使机械系统产生抖动。
轴承滚动体和保持架磨损严重会造成摩擦力增加导致“堵转”,“堵转”在不至于导致“过载报警”的情况下,由于负载过重,会增加伺服系统的响应时间产生振动;(2)电机转子不平衡,电机转子的动平衡制造时有缺陷或使用后变差,就会产生形如“振动电机”一样的振动源;(3)转轴弯曲,转轴弯曲的情况类似于转子不平衡,除了会产生振动源也会产生电机转子中心和丝杠中心的同轴度误差,使机械传动系统产生抖动;(4)联轴器制造缺陷或使用后磨损会造成联轴器两部分的同轴度误差,特别是使用铸造的刚性联轴器,由于本身的制造精度差,更容易产生同轴度误差导致振动;(5)导轨的平行度在制造时较差会导致伺服系统无法到达指定位置到无法停留在指定位置,这时伺服电机会不停的在努力寻找位置和系统反馈间徘徊,使电机连续的振动;(6)丝杠与导轨平面的平行度误差,丝杠在安装过程中与导轨所在平面有平行度误差也会使电机由于负载不均匀产生振动;(7)丝杠弯曲,丝杠弯曲后丝杠除了受到轴向推力外还会受到变化的径向力,弯曲大时径向力大,弯曲小时径向力小,同样这种不应该存在的径向力也会使机械传动系统产生振动。
伺服电机常见故障与维修
伺服电机常见故障与维修伺服电机常见故障与维修伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
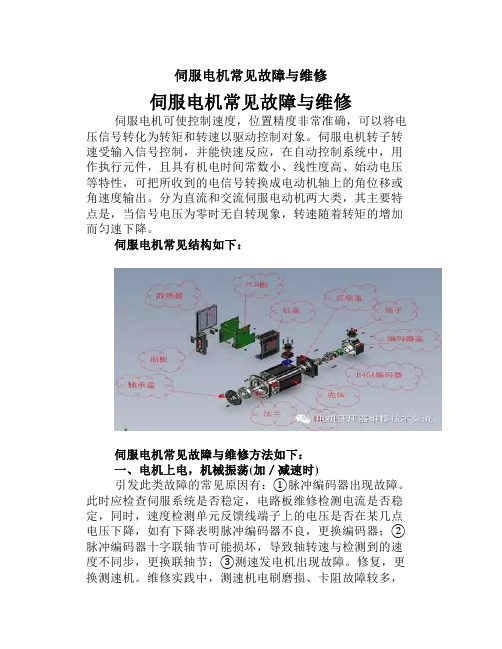
伺服电机常见结构如下:伺服电机常见故障与维修方法如下:一、电机上电,机械振荡(加/减速时)引发此类故障的常见原因有:①脉冲编码器出现故障。
此时应检查伺服系统是否稳定,电路板维修检测电流是否稳定,同时,速度检测单元反馈线端子上的电压是否在某几点电压下降,如有下降表明脉冲编码器不良,更换编码器;②脉冲编码器十字联轴节可能损坏,导致轴转速与检测到的速度不同步,更换联轴节;③测速发电机出现故障。
修复,更换测速机。
维修实践中,测速机电刷磨损、卡阻故障较多,此时应拆下测速机的电刷,用纲砂纸打磨几下,同时清扫换向器的污垢,再重新装好。
二、电机上电,机械运动异常快速(飞车)出现这种伺服整机系统故障,应在检查位置控制单元和速度控制单元的同时,还应检查:①脉冲编码器接线是否错误;②脉冲编码器联轴节是否损坏;③检查测速发电机端子是否接反和励磁信号线是否接错。
一般这类现象应由专业的电路板维修技术人员处理,负责可能会造成更严重的后果。
三、主轴不能定向移动或定向移动不到位出现这种伺服整机系统故障,应在检查定向控制电路的设置调整、检查定向板、主轴控制印刷电路板调整的同时,还应检查位置检测器(编码器)的输出波形是否正常来判断编码器的好坏(应注意在设备正常时测录编码器的正常输出波形,以便故障时查对)。
四、坐标轴进给时振动应检查电机线圈、机械进给丝杠同电机的连接、伺服系统、脉冲编码器、联轴节、测速机。
五、出现NC错误报警NC报警中因程序错误,操作错误引起的报警。
伺服电机常见故障代码分析及处理方法

伺服电机常见故障代码分析及处理方法伺服电机是通过控制回路来实现精确定位和控制转速的电机,常见故障代码可能会导致电机无法工作或者无法达到预期的运动效果。
以下是一些常见故障代码及其处理方法:1.报警代码E01:驱动过流保护。
这通常是由于电机受力过大或者电机驱动器故障引起的。
处理方法是检查电机负载是否正常,可以通过减小负载或增加驱动器容量来解决。
2.报警代码E02:驱动过热保护。
这可能是由于电机驱动器温度过高引起的。
处理方法是检查驱动器是否通风良好,并确保散热器没有堵塞。
还可以降低电机负载或者增加驱动器的容量。
3.报警代码E03:驱动器故障。
这可能是由于驱动器的故障引起的,例如驱动器损坏或者通讯故障。
处理方法是检查驱动器是否正常工作,可以尝试重新启动驱动器或更换驱动器。
4.报警代码E04:位置超差。
这可能是由于位置误差超过了设定的阈值引起的。
处理方法是检查位置传感器的准确性,可以通过重新校准位置传感器来解决。
5.报警代码E05:速度超差。
这可能是由于速度误差超过了设定的阈值引起的。
处理方法是检查速度传感器的准确性,并确保传感器与驱动器的通讯正常。
6.报警代码E06:电机过载。
这可能是由于电机受力过大引起的。
处理方法是检查电机负载是否正常,可以通过减小负载或增加驱动器容量来解决。
7.报警代码E07:电机过热。
这可能是由于电机温度过高引起的。
处理方法是检查电机是否通风良好,并确保散热器没有堵塞。
还可以降低电机负载或者增加驱动器的容量。
除了以上常见故障代码,还可能会出现其他故障,例如电机无法运动、电机运动不匀速等。
在处理这些故障时,可以先检查电机驱动器及其控制系统是否正常工作,然后逐步检查电机及其相关传感器的准确性,最后根据具体情况采取相应的措施。
总结起来,伺服电机常见故障代码分析及处理方法主要包括检查电机负载、驱动器温度及散热情况、驱动器及通讯故障、位置及速度传感器准确性、电机温度等方面,并根据具体情况采取相应的修复措施。
伺服电机系统常见故障及维修

伺服电机系统常见故障及维修一、电机不转或转动无力的故障可能原因及维修方法1.1 电机供电异常电机供电异常可能是由于电源线路的接触不良或电源开关故障引起的。
首先,检查电源线路是否插好,是否存在破损或接触不良的情况,若有问题,重新连接或更换电源线路。
同时,检查电源开关是否正常工作,如有问题,及时维修或更换。
1.2 控制器故障控制器故障可能导致电机无法正常工作。
检查控制器的指示灯是否点亮,若无亮灯提示,说明可能存在控制器故障。
此时应先尝试重新启动控制器,如果问题仍然存在,需要检查控制器的电路板和连接线路是否损坏,如有损坏,可尝试修复或更换。
1.3 电机零部件损坏电机零部件损坏也会导致电机无法正常转动或转动无力。
常见的损坏部件包括电刷、轴承和绕组等。
若发现电刷磨损、轴承磨损或绕组烧毁等情况,需要及时更换损坏部件。
二、电机发热过高的故障可能原因及维修方法2.1 过载工作过载工作是导致电机发热过高的常见原因之一。
检查电机负载是否超过额定工作范围,如果超载,则需要减小负载或更换功率较大的电机。
2.2 电机通风不良电机通风不良会导致散热不畅,进而引发过热问题。
检查电机周围是否存在堵塞物或灰尘等,清除堵塞物并保持通风良好。
2.3 绕组短路或接触不良绕组短路或接触不良会导致电流过大,进而使电机发热过高。
检查电机绕组是否存在损坏或接触不良的情况,如有问题,需重新绝缘或修复绕组。
三、电机震动较大的故障可能原因及维修方法3.1 电机不平衡电机不平衡是导致震动的常见原因之一。
检查电机固定是否牢固,如发现松动,需重新固定电机。
3.2 机械部件损坏机械部件损坏也会导致电机震动较大。
检查电机的传动装置,如发现齿轮磨损、轴承松动等情况,应及时更换损坏部件。
3.3 电机负载不均衡电机负载不均衡也可能导致电机震动。
检查负载的均衡性,如需要,调整或重新安装负载,以平衡电机负载。
综上所述,伺服电机系统常见故障主要包括电机不转或转动无力、电机发热过高和电机震动较大等问题。
常见的伺服系统故障及其解决方法是什么
常见的伺服系统故障及其解决方法是什么伺服系统在工业自动化中扮演着重要角色,能够精确控制运动系统,提高生产效率和产品质量。
然而,伺服系统也存在一些常见的故障问题,如电机运行异常、传感器信号异常等。
本文将介绍几种常见的伺服系统故障,并提供相应的解决方法。
一、电机运行异常电机运行异常是伺服系统故障中最常见的问题之一。
可能的原因包括电机绕组断线、电机轴承磨损、电机电缆接触不良等。
解决这些问题的方法如下:1. 检查电机绕组:使用万用表或欧姆表检查电机绕组是否有断线或短路。
如果发现问题,需要修复或更换绕组。
2. 检查电机轴承:观察电机轴承是否转动灵活,有无异响。
如发现轴承磨损,应及时更换。
3. 检查电缆接触不良:检查电机电缆是否牢固连接在驱动器和电机上。
如果接触不良,要重新紧固连接。
二、传感器信号异常传感器信号异常是导致伺服系统故障的另一个常见问题。
可能的原因包括传感器损坏、接线错误或传感器信号干扰。
以下是解决方法:1. 检查传感器状态:使用测试仪器检查传感器输出信号是否正常。
如果信号异常,需要更换传感器。
2. 检查接线:根据传感器的接线图,检查传感器的接线是否正确。
如果接线错误,要重新进行正确的接线。
3. 降低信号干扰:将传感器与其他电源线隔离,可以降低信号干扰的可能性。
另外,可以使用屏蔽线缆来减少干扰。
三、驱动器故障驱动器故障也是伺服系统常见的问题之一。
可能的原因包括驱动器过载、驱动器配置错误等。
以下是解决方法:1. 调整驱动器参数:检查驱动器的参数配置是否正确,包括电机额定电流、电机类型等。
根据实际情况,调整参数配置。
2. 检查电源电压:检查驱动器所使用的电源电压是否稳定。
如果电源电压过高或过低,可能导致驱动器故障,需要进行调整或更换电源。
3. 隔离过载源:如果驱动器过载,可以尝试隔离过载源,如减小负载、增加驱动器容量等。
综上所述,常见的伺服系统故障包括电机运行异常、传感器信号异常和驱动器故障。
解决这些问题的方法涉及到检查电机绕组、电机轴承和电缆接触状态,检查传感器状态和接线情况,调整驱动器参数和电源电压等。
常见的伺服驱动器故障及处理方法

常见的伺服驱动器故障及处理方法伺服驱动器是一种控制电机运动的装置,用于将控制信号转换为电机运动。
然而,由于各种原因,伺服驱动器可能会发生故障,导致电机无法正常运转。
以下是一些常见的伺服驱动器故障及处理方法:1.电源故障:伺服驱动器的电源供应不稳定或无法正常工作,可能导致电机运动异常或停止。
处理方法包括检查电源连接是否稳定,更换或修复电源供应设备。
2.控制信号故障:伺服驱动器的控制信号传输发生故障,使电机无法按预期进行运动。
处理方法包括检查信号线是否连接正确,信号是否在传输过程中受到干扰,更换或修复信号传输设备。
3.电机故障:伺服驱动器无法正确控制电机运动的一个常见原因是电机本身出现故障。
处理方法包括检查电机是否受损或烧毁,更换故障电机。
4.参数设置错误:伺服驱动器的参数设置与实际应用要求不匹配,导致电机无法正常工作。
处理方法包括检查伺服驱动器的参数设置是否正确,根据实际需求重新配置参数。
5.过载保护:伺服驱动器可能会出于过载保护的目的停止电机运动。
处理方法包括检查负载是否过重或电机是否存在其他故障,减少负载或修复电机问题。
6.温度过高:伺服驱动器长时间工作可能导致温度过高而停止运行。
处理方法包括检查散热设备是否正常工作,增加散热效果或降低工作负载。
7.通讯故障:伺服驱动器与其他设备之间的通讯故障可能导致电机无法正常运行。
处理方法包括检查通讯线路是否连接正确,通讯协议是否一致,修复或替换通讯设备。
8.机械部件故障:伺服驱动器的机械结构或传动部件出现故障可能导致电机无法运动。
处理方法包括检查机械部件是否受损或磨损,修复或更换故障部件。
9.乱码或干扰:伺服驱动器可能会受到外部干扰或电磁干扰导致运动异常。
处理方法包括检查干扰源并采取隔离措施,加装屏蔽设备或更换信号处理设备。
10.软件故障:伺服驱动器的控制软件可能出现错误或崩溃,导致电机无法正常运行。
处理方法包括重启伺服驱动器,重新安装或更新软件。
伺服驱动器常见故障的原因及对策

伺服驱动器常有故障的原由及对策伺服驱动器因为长时间的使用,不免会出现故障,最重要的是实时查找出原由,对应解决故障,提早恢复正常使用。
小编在这整理伺服驱动器常有的故障原由及对策供大家参考。
1、伺服电机在有脉冲输出时不运行,怎样办理?①监督控制器的脉冲输出目前值以及脉冲输出灯能否闪耀,确认指令脉冲已经执行并已经正常输出脉冲 ;②检查控制器到驱动器的控制电缆,动力电缆,编码器电缆能否配线错误,损坏或许接触不良 ;③检查带制动器的伺服电机其制动器能否已经翻开;④监督伺服驱动器的面板确认脉冲指令能否输入;⑤ Run 运行指令正常 ;⑥控制模式务必选择地点控制模式;⑦伺服驱动器设置的输入脉冲种类和指令脉冲的设置能否一致;⑧保证正转侧驱动严禁,反转侧驱动严禁信号以及偏差计数器复位信号没有被输入,脱开负载而且空载运行正常,检查机械系统。
2、伺服电机高速旋转时出现电机偏差计数器溢犯错误,怎样办理?①高速旋转时发生电机偏差计数器溢犯错误;对策:检查电灵活力电缆和编码器电缆的配线能否正确,电缆能否有损坏。
②输入较长指令脉冲时发生电机偏差计数器溢犯错误;对策:a. 增益设置太大,从头手动调整增益或使用自动调整增益功能;b. 延伸加减速时间 ;c. 负载过重,需要从头选定更大容量的电机或减少负载,加装减速机等传动机构提高负荷能力。
③运行过程中发生电机偏差计数器溢犯错误。
对策:a. 增大偏差计数器溢出水平设定值;b. 减慢旋转速度 ;c. 延伸加减速时间 ;d. 负载过重,需要从头选定更大容量的电机或减少负载,加装减速机等传动机构提升负载能力。
3、伺服电机做地点控拟订位严禁,怎样办理?① 第一确认控制器实质发出的脉冲目前值能否和预料的一致,如不一致则检查并修正程序 ;② 监督伺服驱动器接收到的脉冲指令个数能否和控制器发出的一致,如不一致则检查控制线电缆 ;③检查伺服指令脉冲模式的设置能否和控制器设置得一致,如CW/CCW仍是脉冲+方向;④伺服增益设置太大,试试从头用手动或自动方式调整伺服增益;⑤ 伺服电机在进行来去运动时易产生积累偏差,建议在工艺同意的条件下设置一个机械原点信号,在偏差高出同意范围以行进行原点搜寻操作;⑥机械系统自己精度不高或传动机构有异样( 如伺服电机和设施系统间的联轴器部发生偏移等 ) 。
伺服电机常见故障分析及处理

伺服电机常见故障分析及处理三相交流伺服电机应用广泛,但经过长期运行后,会发生各种故障。
及时判断故障原因,进行相应处理,是防止故障扩大,保证设备正常运行的一项重要工作。
一电机编码器报警01故障原因①接线错误;②电磁干扰;③机械振动导致的编码器硬件损坏;④现场环境导致的污染;02故障排除①检查接线并排除错误;②检查屏蔽是否到位,检查布线是否合理并解决,必要时增加滤波器加以改善;③检查机械结构,并加以改进;④检查编码器内部是否受到污染、腐蚀(粉尘、油污等),加强防护;03安装及接线标准①尽量使用原装电缆;②分离电缆使其尽量远离污染接线,特别是高污染接线;③尽可能始终使用内部电源。
如果使用开关电源,则应使用滤波器,确保电源达到洁净等级;④始终将公共端接地;⑤将编码器外壳与机器结构保持绝缘并连接到电缆屏蔽层;⑥如果无法使编码器绝缘,则可将电缆屏蔽层连接到编码器外壳和驱动器框架上的接地 (或专用端子)。
二电机断轴01故障原因①机械设计不合理导致径向负载力过大;②负载端卡死或者严重的瞬间过载;③电机和减速机装配时不同心。
02故障排除①核对电机样本中可承受的最大径向负载力,改进机械设计;②检查负载端的运行情况,确认实际的工艺要求并加以改进;③检查负载运行是否稳定,是否存在震动,并加以改进机械装配精度。
三电动机空载电流不平衡,三相相差大01 故障原因①绕组首尾端接错;②电源电压不平衡;③绕组存在匝间短路、线圈反接等故障。
02故障排除①检查并纠正;②测量电源电压,设法消除不平衡;③消除绕组故障。
四电动机运行时有异响01 故障原因①轴承磨损或油内有砂粒等异物;②转子铁芯松动;③轴承缺油;④电源电压过高或不平衡。
02故障排除①更换轴承或清洗轴承;②检修转子铁芯;③加油;④检查并调整电源电压。
五电动机起动困难,额定负载时,电动机转速低于额定转速较多01 故障原因①电源电压过低;②面接法电机误接;③转子开焊或断裂;④转子局部线圈错接、接反;③修复电机绕组时增加匝数过多;⑤电机过载。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
速度比例增益
①设定速度调节器的比例增益。
②设置值越大,增益越高,刚度越大。参数数 值根据具体的伺服驱动系统型号和负载值情况 确定。一般情况下,负载惯量越大,设定值越 大。
②数值越大,截止频率越低,电机产生的噪 音越小。如果负载惯量很大,可以适当减小 设定值。数值太大,造成响应变慢,可能会 引起振荡。
③数值越小,截止频率越高,速度反馈响应 越快。如果需要较高的速度响应,可以适当 减小设定值。
最大输出转矩设置 ①设置伺服电机的内部转矩限制值。
②设置值是额定转矩的百分比,例如设定为额 定转矩的1倍,则设置值为16383。 ③任何时候,这个限制都有效
10K CWTL18
10K1K SPM 43
1K IM 42
CCW转矩限制输入(0--+10伏)
CW转矩限制输入(-10--0伏) 速度监视输出 转矩监视输出
RS232 I/o 模拟输入
键盘、显示
电源、制动
DSP 逻辑门阵列
IGBT 逆变器
故障检测、保护
交流 伺服 电机
位置传感器
与伺服调节有关的参数
位置到位 1V2D~C24V
机械制动释放
转矩限制中 PR09选择 零速检出 PR0A选择
35 S-RDY+ 34 S-RDY37 ALM+ 36 ALM39
COIN+ 38 COIN11 BRKOFF+ 10 BRKOFF40 TLC
12 ZSP
41 COM-
FG
CNI/F
分频器
1
2 PULS31
4 PULS2
7
COM+
指令脉冲输入禁33止 INH
计数清零
30 CL
伺服-ON
29 SRV-ON
4.7K
ቤተ መጻሕፍቲ ባይዱ
P运行/第2增益2选7择GAIN
指令脉冲分配选28择 DIV
26 ZEROSPD
控制方式选择 32 C-MODE 报警清除 31 A-CLR CCW驱动禁止9 CCWL CW驱动禁止 8 CWL
伺服准备好
伺服报警
位置比例增益 ①设定位置环调节器的比例增益。 ②设置值越大,增益越高,刚度越大,相同频率指令脉 冲条件下,位置滞后量越小。但数值太大可能会引起振 荡或超调。 ③参数数值由具体的伺服系统型号和负载情况确定。
位置前馈增益 ①设定位置环的前馈增益。
②设定值越大时,表示在任何频率的指令脉冲下,位 置滞后量越小
5 SIGN1
SIGN62 GND13
21 OA+
22 OA-
OB+ 48 OB- 49 OZ+ 23
OZ- 24
指令脉冲输入
A相脉冲输入 B相脉冲输入 C相脉冲输入
46
47
25 GND CZ 19 Z相脉冲开集电极输出
20KSPR/T1R4QR
GND 15
10K
16 CCWTL/TRQR
10K GND17
24V X20 X17
+KA10
8
12 330
SANYO DENKI AC SERVO DRIVE
CN1
37 SRV-ON 15 A-RST 50 CONT-COM
R2 510欧
21 V-REF
20 SG
26 F-PC
47 /F-PC
28 R-PC
48 /R-PC
3
OA+
4
OA-
5
OB+
6
OB-
7
OZ+
(2). 按下WR键1秒钟.显示起初屏幕页面.当按下 MODE键,返回到页面选择屏幕。当再次按下 MODE键,转换到下一组模式.
(3). 监控模式各页码说明如表二:
页码 00 01 02 03 04 05 06
功能描述 速度模拟指令/转矩指令自动便致 转矩模拟指令自动提升 报警复位 编码器清除 固定励磁 手动操作 自整定陷波滤波器
(4). 将系统参数 “ ru08”设为速度控制方式01H, 然后
进入选择测试调整模式“Ad05”手动操作,按WR键一 秒钟以上,D数码显示为“y_ _ _n”后选择yes. D数码 显示为“rdy”. 然后按up键电机按正方向运转,按
。 down键时电机按反方向运转,松开手电机则停止运转
伺 服 驱 动 的 接 线
1. 主回路接线
按图14-10连接(或检查)r 、t及R、S、T与电 源的连线;连接(或检查)伺服驱动器U、V、 W与伺服电动机U、V、W之间的接线;连接 (或检查)伺服电动机位置传感器与伺服驱动 器的连接电缆;连接(或检查)伺服ON控制 线及开关。
100 Y16 24V
OUTA
GND CP0+ CP0DIR0+ DIR0A+ AB+ BZ+ ZGND
8
OZ-
12 GND
49 OUT-PWR
41 S-RDY 43 A-RDY
CNA R 1 S2 T3 r4 t5
CNC U 6 UZ
V7
VZ
W8
WZ
PE 9
RVV4X1.5 RVV2X0.5
RVV 5X0.5
R S T 220A 220B
AC SERVO MOTOR
UZ (红)
VZ (白) WZ (黑)
③在系统不产生振荡的条件下,尽量设定较大 的值。
速度积分时间常数
①设定速度调节器的积分时间常数。
④设置值越小,积分速度越快。参数数值根据 具体的伺服驱动系统型号和负载情况确定。一 般情况下,负载惯量越大,设定值越大。
②在系统不产生振荡的条件下,尽量设定较小 的值。
速度反馈滤波因子
①设定速度反馈低通滤波器特性。
MS
PG
3~
PE (绿/黄)
CN2
A3
/A 4
B5
/B 6 Z7
/Z 8
+5V 9,12
+5V 17,19
0V
10,11
0V 16,18,20
FG
RVVP 6*2*0.14
蓝A
棕 /A
绿B
紫 白 黄
/B Z
/Z
红 +5V
黑 0V
FG
2.空载下调试及运转
松开伺服电机与负载的联轴器,接通伺服驱动 器的电源,参考“交流伺服驱动器Q系列用户 手册” 先进入测试调整模式,测试调整模式可 以执行伺服驱动器的测试操作,自整定,报警复 位和编辑清除.其数字操作器的按键说明如表1:
键 名 标志 输入时间
功能
确认 WR 键
光标 ▲ 键
上键 ▲
1秒钟以上 一秒以内 一秒以内
下键
模式 键
▼
一秒以内
MOD 一秒以内 E
确认选择和写入后的编辑数据
选择光标位
在正确的光标位置按键改变数 据,当按下1秒或更长时间,数据 上下移动
选择显示模式
具体调试步骤如下:
(1).按下MODE键显示监控模式<Ad --- >,然后选 择页面屏幕<Ad 0>,通过上下键来增加和减少数 值.