矢量三角形法则求解三个共点力平衡的案例教学
利用矢量三角形巧解三力动态平衡问题
利用矢量三角形巧解三力动态平衡问题共点力平衡高中物理的一个重要的知识点,是高考中的一个重要考点,其中动态平衡问题又是平衡问题中的重点和难点,如何快速准确的解决这类问题呢?首先要了解动态平衡有哪几种类型,不同的情况有不同的技巧和方法解决。
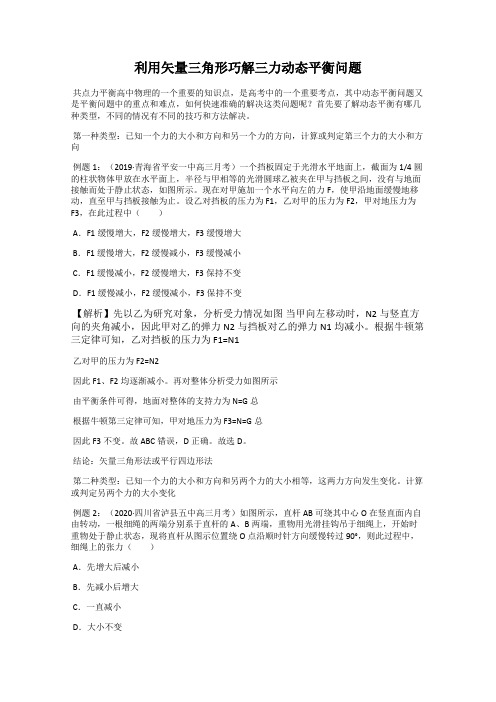
第一种类型:已知一个力的大小和方向和另一个力的方向,计算或判定第三个力的大小和方向例题1:(2019·青海省平安一中高三月考)一个挡板固定于光滑水平地面上,截面为1/4圆的柱状物体甲放在水平面上,半径与甲相等的光滑圆球乙被夹在甲与挡板之间,没有与地面接触而处于静止状态,如图所示。
现在对甲施加一个水平向左的力F,使甲沿地面缓慢地移动,直至甲与挡板接触为止。
设乙对挡板的压力为F1,乙对甲的压力为F2,甲对地压力为F3,在此过程中()A.F1缓慢增大,F2缓慢增大,F3缓慢增大B.F1缓慢增大,F2缓慢减小,F3缓慢减小C.F1缓慢减小,F2缓慢增大,F3保持不变D.F1缓慢减小,F2缓慢减小,F3保持不变【解析】先以乙为研究对象,分析受力情况如图当甲向左移动时,N2与竖直方向的夹角减小,因此甲对乙的弹力N2与挡板对乙的弹力N1均减小。
根据牛顿第三定律可知,乙对挡板的压力为 F1=N1乙对甲的压力为 F2=N2因此F1、F2均逐渐减小。
再对整体分析受力如图所示由平衡条件可得,地面对整体的支持力为 N=G总根据牛顿第三定律可知,甲对地压力为 F3=N=G总因此F3不变。
故ABC错误,D正确。
故选D。
结论:矢量三角形法或平行四边形法第二种类型:已知一个力的大小和方向和另两个力的大小相等,这两力方向发生变化。
计算或判定另两个力的大小变化例题2:(2020·四川省泸县五中高三月考)如图所示,直杆AB可绕其中心O在竖直面内自由转动,一根细绳的两端分别系于直杆的A、B两端,重物用光滑挂钩吊于细绳上,开始时重物处于静止状态,现将直杆从图示位置绕O点沿顺时针方向缓慢转过90°,则此过程中,细绳上的张力()A.先增大后减小B.先减小后增大C.一直减小D.大小不变【解析】:挂钩相当于滑轮,因此绳上的张力相等,且两边绳子与竖直方向的夹角相等,设两边绳子与竖直方向的夹角为θ,将直杆从图示位置绕O点沿顺时针方向缓慢转过90°的过程中,θ先增大后减小,由2Fcosθ=mg可知绳上的张力先增大后减小,选项A正确。
2021宁德教师招聘物理学科备考:共点力作用下的平衡问题分析方法
2021宁德教师招聘物理学科备考:共点力作用下的平衡问题分析方法
一、图解法(矢量三角形)
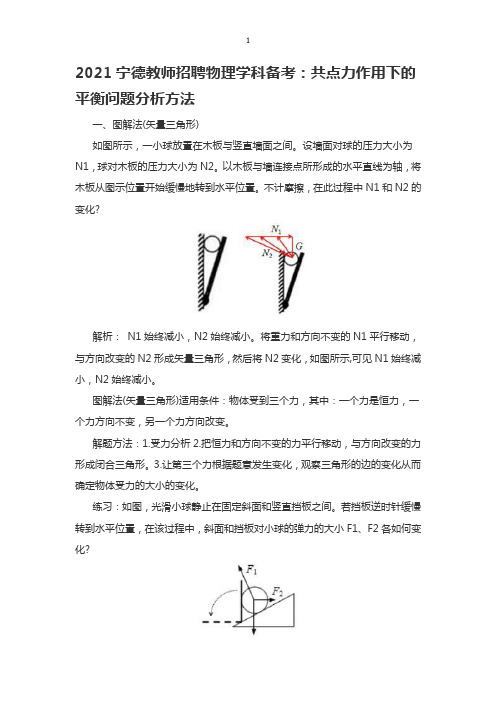
如图所示,一小球放置在木板与竖直墙面之间。
设墙面对球的压力大小为N1,球对木板的压力大小为N2。
以木板与墙连接点所形成的水平直线为轴,将木板从图示位置开始缓慢地转到水平位置。
不计摩擦,在此过程中N1和N2的变化?
解析:N1始终减小,N2始终减小。
将重力和方向不变的N1平行移动,与方向改变的N2形成矢量三角形,然后将N2变化,如图所示,可见N1始终减小,N2始终减小。
图解法(矢量三角形)适用条件:物体受到三个力,其中:一个力是恒力,一个力方向不变,另一个力方向改变。
解题方法:1.受力分析2.把恒力和方向不变的力平行移动,与方向改变的力形成闭合三角形。
3.让第三个力根据题意发生变化,观察三角形的边的变化从而确定物体受力的大小的变化。
练习:如图,光滑小球静止在固定斜面和竖直挡板之间。
若挡板逆时针缓慢转到水平位置,在该过程中,斜面和挡板对小球的弹力的大小F1、F2各如何变化?
【答案】F1逐渐变小,F2先变小后变大。
解析:由于挡板是缓慢转动的,可以认为每个时刻小球都处于静止状态,因此所受合力为零。
应用三角形法则,G、F1、F2三个矢量应组成封闭三角形,其中G的大小、方向始终保持不变;F1的方向不变;F2的起点在G的终点处,而终点必须在F1所在的直线上,由右图可知,挡板逆时针转动90°过程,F2矢量也逆时针转动90°,因此F1逐渐变小,F2先变小后变大。
(当F2⊥F1,即挡板与斜面垂直时,F2最小)。
专题13:用三角形法解决共点力平衡问题—【稳扎稳打】备战2021高考物理一轮复习微专题
【稳扎稳打】备战2021高考物理一轮复习微专题专题13: 用三角形法解决共点力平衡问题【要点回顾】1.选定研究对象2.隔离物体进行受力分析(一重、二弹、三摩擦、四其他)3.画出受力示意图4.做出力的矢量三角形,按照三角函数关系进行求解,对于动态平衡,适合于三力平衡中有一个力是恒力,另一个力方向不变的问题。
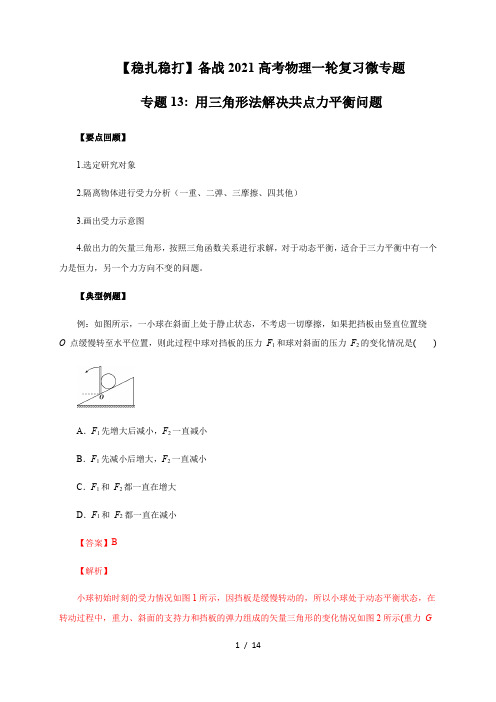
【典型例题】例:如图所示,一小球在斜面上处于静止状态,不考虑一切摩擦,如果把挡板由竖直位置绕O点缓慢转至水平位置,则此过程中球对挡板的压力F1和球对斜面的压力F2的变化情况是()A.F1先增大后减小,F2一直减小B.F1先减小后增大,F2一直减小C.F1和F2都一直在增大D.F1和F2都一直在减小【答案】B【解析】小球初始时刻的受力情况如图1所示,因挡板是缓慢转动的,所以小球处于动态平衡状态,在转动过程中,重力、斜面的支持力和挡板的弹力组成的矢量三角形的变化情况如图2所示(重力G的大小、方向均不变,斜面对小球的支持力 F ′2的方向始终不变),由图2可知此过程中斜面对小球的支持力F ′2不断减小,挡板对小球的弹力F ′1先减小后增大,由牛顿第三定律可知选项B 正确。
【跟踪练习】1. 如图所示,光滑半球形容器固定在水平面上,O 为球心,一质量为m 的小滑块,在水平力F 的作用下静止P 点。
设滑块所受支持力为F N ,OF 与水平方向的夹角为θ, 下列关系正确的是A .tan mg F θ= B .tan F mg θ=C .=tan N mg F θD .tan N F mg θ=【答案】A【解析】物体处于平衡状态,对物体受力分析,根据共点力平衡条件,可求出支持力和水平推力.对小滑块受力分析,受水平推力F 、重力G 、支持力F N 、根据三力平衡条件,将受水平推力F 和重力G 合成,如图所示,由几何关系可得tan mg F θ=,sin N mg F θ=,A 正确. 2. 如图所示,光滑斜面固定在水平地面上,在沿斜面向上拉力F 的作用下,小物块静止在斜面上。
高一物理《习题课3 共点力平衡的三类问题》PPT课件
2.分析动态平衡问题的方法
方法
解析法
ห้องสมุดไป่ตู้图解法
相似三
角形法
步骤
(1)列平衡方程求出未知量与已知量的关系表达式;
(2)根据已知量的变化情况来确定未知量的变化情况
(1)根据已知量的变化情况,画出平行四边形边、角的变化;
(2)确定未知量大小、方向的变化
(1)根据已知条件画出同情况下对应的力的三角形和空间几何
θ,由于F、θ未知,故B对A的支持力FN可能小于mg,故C错误;以A、
B为整体受力分析如图所示,则根据共点力的平衡条件,可知水平方向不受
摩擦力作用,即B与地面之间没有摩擦力,故B错误;在竖直方向有FN'=
(M+m)g,即地面对B的支持力为(M+m)g,故D正确。
上一页
返回导航
下一页
2.【动态平衡问题】(2022·莆田二中期中)如图所示,一
三角形,判断各力的大小及变化。
FN1
G
适用于三力动态平衡(一恒力、一定向力)
一恒力(大小方向均不变)、一定向力(方向不变、大小变)、
一变力(大小方向都变)。判断定向力和另一个变力的大小变化
方法二:解析法
mg
mg
如图所示,因为FN1=
,FN2=
,
tan
sin
随θ逐渐增大到90°,tan θ、sin θ 都增大,
已知轻弹簧处于压缩状态,且弹力大小 F 弹=2 N,物体与斜面间的动摩擦因
数 μ=0.5,最大静摩擦力等于滑动摩擦力,sin 37°=0.6,cos 37°=0.8,
取重力加速度大小 g=10 m/s2。
(1)若物体恰好不受摩擦力,求推力 F 的大小;
(2)要使弹簧的弹力不变,求推力 F 的取值范围。
用矢量三角形解三力平衡问题

相似应用
O
T L H
X
B
T
A
G
对小球进行受力分析:
左图中出现了几何三角形, 且几何三角形三条边分别跟 小球受到的三个力方向一致。
建立与几何三角形明显相
F
似的矢量三角形,如图
由比例关系知:
G T HL
L 不变, 则 T 不变;
G F X 减小, H X 则 F 减小。
F
矢量三角形与圆的知识结合
如图,一个小物块静止的放 在长木板上,现缓慢增大木 板与水平方向的夹角,假设 物块始终相对木板静止。试 利用矢量三角形判断物块所 受支持力 FN 和摩擦力 f 大小 的变化情况。
对小球进行受力分析:
T
H
L
左图中出现了几何三角形, 且几何三角形三条边分别跟 小球受到的三个力方向一致。
FN
建立与几何三角形明显相 似的矢量三角形,如图
R
T
由比例关系知:
G T L 减小, H L 则 T 减小;
G FN R 不变,
G
FN H R 则 FN 不变。
相似应用
O
A
如图,A球固定于空间一点,B 球用不可伸长的绝缘轻线拴住, 悬挂于A球正上方的O点,两球 因带有同种电荷而互相排斥,斥 力方向沿两球连线方向。随着时 间的推移,两球因电量损失而缓 B 慢靠近,试判断在两球缓慢靠近 的过程中,绳对小球的拉力 T 和 A对B的斥力 F 大小变化情况。
FNf Βιβλιοθήκη NG f对物块进行受力分析: 不难看出:随着挡板倾角的增大, FN 和 f 的方向都会随着变化,不 过,FN 和 f 的夹角始终是90º。
构建矢量三角形,如图
可见,FN 一直减小, f 一直增大。
矢量三角形在(动态)平衡问题中的应用(共14张PPT)
Thanks!
FN 1
F1
2
F2
G
F1=mgtan;
G
FN=mg/cos
F2=mgsin ;FN=mgcos
案例2.
如图所示,轻绳AO和BO共同吊起质量为m的重 物。AO 与BO垂直,BO与竖直方向的夹角为,OC连 接重物, 则 ( AC ) A. AO所受的拉力大小为mgsin B. AO所受的拉力大小为mg/sin C. BO所受的拉力大小为mgcos D. BO所受的拉力大小为mg/cos
解: 原来每根木棍受到的弹力为N,则摩擦力为f=μN, 圆柱工件P受到推力F作用匀速运动, 所以2f=2μN=F,f= F/2, 当间距稍微减小一些后,每根木棍 受到的弹力N'减小(如图示), 则摩擦力f'=μN' 减小, N' N' N N C A A' mgC'
故AB棍受到的摩擦力一定小于F/2,CD错; 工件P受到的摩擦力2 f' <F,圆形工件P向右做 加速运动,A错B正确。
D
FOB FOA
FOC=G
案例4. 如图所示,保持 不变,将B点向上移,则BO绳的 拉力将( C ) A. 逐渐减小 B. 逐渐增大 C. 先减小后增大 D. 先增大后减小
A
B O C
G 图19
N
G F
案例5、如图5所示,光滑大球固定不动,它的正上方有一个 定滑轮,放在大球上的光滑小球(可视为质点)用细绳连接, 并绕过定滑轮,当人用力F缓慢拉动细绳时,小球所受支持 力为N,则N,F的变化情况是( ) A、都变大; B、N不变,F变小; C、都变小; D、N变小,F不变。
第四章 处理共点力平衡问题常见方法和技巧课件示例 人教版
y
FN=mgcos370 F=mgsin370+Ff Ff=µFN
Ff
FN F 370 G
x
Back
如图所示,一球夹在竖直墙AC和木板 和木板BC 如图所示,一球夹在竖直墙 和木板 之间,不计摩擦,墙对球的压力为F 之间,不计摩擦,墙对球的压力为 N1,板对 在将板BC逐渐放至水平的过程 球的压力F 球的压力 N2,在将板 逐渐放至水平的过程 下列说法正确的是( 中,下列说法正确的是( F B )
TA
F2
θ
O
B. FTA=mgcotθ C. FTB=mgsinθ D. FTB=mg/sinθ
A θ F
Back
F1
x
如图,重物的质量为m 轻细线AO BO的 AO和 如图,重物的质量为m,轻细线AO和BO的 端是固定的。平衡时AO是水平的,BO与 AO是水平的 A、B端是固定的。平衡时AO是水平的,BO与 水平面夹角为θ AO的拉力 的拉力F BO的拉力 水平面夹角为θ ,AO的拉力FTA和BO的拉力 的大小是( FTB的大小是( )
A
30
600
B
A. 150 B. 300 C. 450 D. 600
Back
O
α
如图所示,质量为10kg物体在拉力 的作用 物体在拉力F的作用 如图所示,质量为 物体在拉力 下沿倾角为37 的斜面匀速上滑, 下沿倾角为 0的斜面匀速上滑,斜面的动摩擦因 数为0.2,求拉力F的大小。(g取10 m/s2 ) 数为 ,求拉力 的大小。( 取 的大小。(
B
A. FTA=mgcosθ B. FTA=mgcotθ C. FTB=mgsinθ D. FTB=mg/sinθ
F F1′
θ
共点力平衡之矢量三角形
Fmin
3 mg 2
二、动态平衡
后续的习题老师可以根据自己的要求自行添加,如果缺乏习题,可以私信我 免费获得,PPT内所有内容均可以自由组合拆散,成品图片均为几何画板制 作,老师需要也可私信我免费获得,谢谢!
a
3
2
1
b
大小 方向
Ta
重力 不变 不变
Ta
变 不变
Tb
变
变
☆应用条件:
Ta
T1 mg
T3 T2 T1
T1 T3 T2
一个恒力,一个方向不变的力!
mg
二、动态平衡
例题:将两个质量均为m的小球a、b用细线相连
O
后,再用细线悬挂于O点,如图所示,用力F拉小
F
球b,使两个小球都处于静止状态,且细线OA与
矢量三角形
一、静态平衡 二、动态平衡
一、静态平衡
三个共点力平衡,可以构成一个收尾相接的三角形,这样就会更加方便的寻找 力与力之间的关系,如下图所示。
F2
F1 F3 cos F2 F3 sin F1
F3 将三个力合成
F3
F1
F2
tan F1
F2
一、静态平衡
例题:如图所示,将四块相同的坚固石块垒成圆弧 形的石拱,3、4两块固定在地基上,1、2两块的接 触面竖直,每个石块的两个侧面所夹圆心角均为30°, 不考虑石块之间的摩擦力,则1、2石块间的作用力 F1和石块1、3间的作用力F2的大小比值?
N1
O T
mP g
P
T
N2
mQ gQ
同一根绳上力大小处处相等 T cos30 mP g T sin 30 mQg mP 3 mQ 1
共点力平衡的几种解法(例题带解析)
共点力平衡的几种解法1.力的合成、分解法:对于三力平衡,一般根据“任意两个力的合力与第三个力等大反向”的关系,借助三角函数、相似三角形等手段求解;或将某一个力分解到另外两个力的反方向上,得到的这两个分力势必与另外两个力等大、反向;对于多个力的平衡,利用先分解再合成的正交分解法。
2.矢量三角形法:物体受同一平面内三个互不平行的力作用平衡时,这三个力的矢量箭头首尾相接,构成一个矢量三角形;反之,若三个力矢量箭头首尾相接恰好构成三角形,则这三个力的合力必为零,利用三角形法,根据正弦定理、余弦定理或相似三角形等数学知识可求得未知力。
矢量三角形作图分析法,优点是直观、简便,但它仅适于处理三力平衡问题。
3.相似三角形法:相似三角形法,通常寻找的是一个矢量三角形与三个结构(几何)三角形相似,这一方法也仅能处理三力平衡问题。
4.正弦定理法:三力平衡时,三个力可构成一封闭三角形,若由题设条件寻找到角度关系,则可用正弦定理列式求解。
5.三力汇交原理:如果一个物体受到三个不平行外力的作用而平衡,这三个力的作用线必在同一平面上,而且必为共点力。
6.正交分解法:将各力分别分解到x轴上和y轴上,运用两坐标轴上的合力等于零的条件,多用干三个以上共点力作用下的物体的平衡,值得注意的是,对“x、y方向选择时,尽可能使落在x、y轴上的力多;被分解的力尽可能是已知力。
不宜分解待求力。
7.动态作图:如果一个物体受到三个不平行外力的作用而处于平衡,其中一个力为恒力,第二个力的方向一定,讨论第二个力的大小和第三个力的大小和方向。
三.重难点分析:1.怎样根据物体平衡条件,确定共点力问题中未知力的方向?在大量的三力体(杆)物体的平衡问题中,最常见的是已知两个力,求第三个未知力。
解决这类问题时,首先作两个已知力的示意图,让这两个力的作用线或它的反向延长线相交,则该物体所受的第三个力(即未知力)的作用线必定通过上述两个已知力的作用线的交点,然后根据几何关系确定该力的方向(夹角),最后可采用力的合成、力的分解、拉密定理、正交分解等数学方法求解。
物体在三个共点力作用下的平衡
mθ图 αβ图AF O图POb a图θ a θ θ bAO ·P图物体在三个共点力作用下的平衡⑴物体在三个非平行力作用下而处于平衡状态时,这三个力的作用线共面且相交于一点: ⑵物体在三个非平行力作用下处于平等状态时,表示这三个力的矢量必组成首尾相接的闭合矢量三角形.推论在解题中的应用:(一)动态分析法: A.对研究对象初始状态进行受力分析,作出受力图;B.确定并画出不变力的矢量图示;C.确定确定或大小不变的第二个力:①若此力的方向不变,则以此方向画射线:②若此力的大小不变,则以第一个力的一端点为圆心,以第二个力为半径画圆.D.确定确定第三个力(全变力)的变化趋向,以推论⑵来判断此力的变化情况.1.如图所示,小球被轻质细绳系着,斜吊着放在光滑劈面上,小球质量为m, 斜面倾角为θ.向右缓慢推劈面,在推动劈面的过程中A 绳上张力先增大后减小 B.绳上张力先减小后增大 C.斜面对小球的支持力减小 D.斜面对小球的支持力增大2.如图,一个重力为G 的球放在光滑斜面上,斜面倾角为α,在斜面上有一光滑 的木板挡住球,使之处于静止状态,今使木板与斜面间夹角β由小于90° 的初始状态缓慢增大到(180°- α),在此过程中,球对挡板的压力N 1和球对斜面的压力N 2的变化情况是 A. N 1一直减小, N 2先增大后减小 B. N 1先减小后增大, N 2一起减小 C. N 1一起增大, N 2一起减小 D. N 1先增大后减小, N 2一起增大 3.如图所示,重为G 的小球用细线吊起,搁在一个光滑的大球面上,线的另一端通 过位于大球球心O 点下上方的A 点的定滑轮由人用力拉住.当人用力缓慢拉线 时,人的拉力F 及大球对小球的支持力N 的变化情况是⑵A.F 变大,N 变大B.F 变大,N 变小C.F 变小,N 不变D.F 变大,N 不变4.在“共点力合成”的实验中,如图所示,使弹簧秤b 图示垂直于PO 的位置 开始顺时针缓慢转动,在b 转过α≤90°的过程中保持O 点位置不变和弹簧秤b 的示数不变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F1
F13 F12 F1 F13 F3 F1
F3 F2 F12 F12=F3 F3 F13=F2 F2
F2
F23
F23=F1
F23
正确作图步骤
总结:运用平行四边形法则将平衡体受到的三个共点力合成时遵循 方向性原则:平衡体受到的三个共点力的方向都是可以判断的 目的性原则:F1、F2的合力与F3等大反向,即化简为二力平衡 唯一性原则:F1、F2的合力与F3等大反向,即合力是唯一的 做法一 F1 做法二 F1 F3 F1 做法三 F13
F12
F3
F3
F2 第一步 物理情景 第二步 受力分析
F2
F2
F23
第三步做平行四边形进行力的合成
总结规律:归纳矢量三角形求解三个共点力平衡的作图方法
做法一
平移F1、F3
做法二
平移F3、F2
做法三
平移F3、F1
F1
F1 F3
F1
两个力平移后形成 首尾相接的三角形 F2 此矢量三角形的快 速做法 F1 F2 F3
结束语
三个共点力平衡的作图要根据实际正确分析各力的方向 合成的目标是将三个共点力平衡化简为二力平衡
作首尾相接的矢量三角形的便捷步骤是保证三个力的方向正确
希望同学们认真领会、掌握,举一反三,学会作图技巧
F1
B
A
绳斜角 θ
杆间距d
f
FN-GA F
F3
F3
F2 F1 F3
F2 F1 F2
F2
F3
先以作用点为起点作F1,再以F1终点为起点作F2,最后以F2终点为起点作F3即成
导学
应用矢量三角形法则求解物体受三个共点力作用下的平衡问题 时必须准确判断三个力的方向
B
FB
A
FA
G
第一步 判断力的方向
第二步 作矢量三角形
实训
受力情景1
θ
矢量 三角形1
θ
斜面θ=30° θ 几何关系1 G Ff
FN
F2
实训
分析各力的方向
分析各力的方向
A
B
在原图上绘制 矢量三角形 在原图上绘制 矢量三角形 F1 G F2 最后效果 G FT FN
最后效果
实训
O
A O A
B
B
F
FN-GA
F FT
GB-fB
fA
将物体所受四个力化简为三个力绘制矢量三角形
实训
F1 F2=G FT F=G
问题的引入(错误做法)
错误1 错误2 F F F 错误3F FT源自FTFTFT
G
G
G
G
正确做法
第三步根据平行四边形法则和平衡条件作图 F1
F13
F1
F3
F1
F12
F3
F2 受力关系 F13=F2
F3
F2 第一步 物理情景 第二步 受力分析 受力关系 F12=F3
F2
F23
受力关系 F23=F1
温故:知识点总结
F
FN
两种受力情形差异性的比较
实训
两绳的夹角θ由 144°减小到60°
A
B
绘制的动态矢量三角形的 最终效果图
A
B
A
B
B A
绳斜角 θ
杆间距d
绳斜角 θ
杆间距d
间距与绳长不变时,绳结点动悬挂点动,绳斜角不变 结论:绳长不变,间距变大时,绳斜角减小(绷紧了)
满足的矢量三角形
晾衣绳情景中的几何关系和物理关系