光电编码器鉴相
光电编码器国检标准

光电编码器的国检标准有35条,这些标准主要涉及到词汇、长度和角度测量、技术产品文件、工业自动化系统、接口和互连设备等方面。
具体来说,这些标准可以用于评定光电编码器的性能、可靠性、安全性等指标,以确保其符合相关要求和规范。
此外,在中国的标准分类中,光电编码器的国检标准还涉及到量具与量仪、光学计量、广播、电视网综合、计量综合、节目传输系统接口、节目传输等领域。
这些标准可以用于评定光电编码器的精度、稳定性、可靠性等方面,以确保其符合相关规范和要求。
总的来说,光电编码器的国检标准是针对该产品的性能和质量进行规范和要求的一组标准,旨在确保其符合相关要求和规范,保证其性能和质量达到一定的水平。
光电编码器的识别方法

光电编码器的识别方法光电编码器是一种常见的位置和运动控制装置,通过光电检测技术来实现位置和运动的测量和控制。
光电编码器的主要原理是利用光电检测器与编码盘上的光栅条之间的交互作用,对光栅条进行编码,从而实现位置和运动的测量。
在实际应用中,光电编码器常常用于工业自动化领域,例如机床、机器人、印刷设备等。
本文将介绍光电编码器的基本原理和常见的识别方法。
1. 光电编码器的基本原理光电编码器是利用光电检测技术来实现位置和运动的测量和控制的装置。
典型的光电编码器由光源、光电检测器和编码盘组成。
光源通常是一种发出可见光的二极管,光电检测器通常是一种光电二极管或光敏电阻。
编码盘上的光栅条通常采用二进制编码,通过光电检测器来感知光栅条的位置,从而完成位置和运动的测量。
2. 光电编码器的常见识别方法2.1 光电检测光电检测是光电编码器最常见的识别方法之一。
该方法通过光电检测器感知编码盘上的光栅条的位置,从而确定位置和运动的信息。
光电检测器一般采用光电二极管或光敏电阻。
光电二极管能够将光信号转化为电信号,通过测量电信号的强度和变化,可以确定光栅条的位置。
光敏电阻则通过感知光的强度变化来实现对光栅条位置的测量。
2.2 增量式测量增量式测量是光电编码器常见的一种测量方法。
该方法需要一对编码盘,分别连接在输入轴和输出轴上。
输入轴上的编码盘通常称为主编码器,输出轴上的编码盘通常称为从编码器。
通过比较主编码器和从编码器输出的编码信号的相位差,可以计算出输入轴的旋转角度和位置。
这种方法可以实现高分辨率的位置和角度测量,但需要进行初次校准。
2.3 绝对式测量绝对式测量是光电编码器另一种常见的测量方法。
与增量式测量不同,绝对式测量可以直接读取编码盘上的绝对位置信息,无需进行初次校准。
这种方法通常需要编码盘上的每个光栅条对应一个编码值,并且编码值是唯一的。
通过光电检测器感知光栅条的位置,并将编码值转化为数字信号,可以实现对位置和角度的测量。
光电编码器原理与维修讲解
高精度的光电编码器的结构及原理2009年06月12日星期五8:48本文主要介绍高精度的光电编码器的内部结构、工作原理与位置检测的方法。
一、光电编码器的介绍:光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的。
根据光电编码器的工作原理可以将光电编码器分为绝对式光电编码器与增量式光电编码器,下面我就这两种光电编码器的结构与工作原理做介绍。
(一)、绝对式光电编码器绝对式光电编码器如图所示,他是通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。
编码盘是按照一定的编码形式制成的圆盘。
图1是二进制的编码盘,图中空白部分是透光的,用“0”来表示;涂黑的部分是不透光的,用“1”来表示。
通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。
如果编码盘有4个码道,则由里向外的码道分别表示为二进制的23、22、21和20,4位二进制可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、 (1111)图1按照码盘上形成的码道配置相应的光电传感器,包括光源、透镜、码盘、光敏二极管和驱动电子线路。
当码盘转到一定的角度时,扇区中透光的码道对应的光敏二极管导通,输出低电平“0”,遮光的码道对应的光敏二极管不导通,输出高电平“1”,这样形成与编码方式一致的高、低电平输出,从而获得扇区的位置脚。
(二)、增量式光电编码器 Increamental Optical-electrical Encoder增量式光电编码器是码盘随位置的变化输出一系列的脉冲信号,然后根据位置变化的方向用计数器对脉冲进行加/减计数,以此达到位置检测的目的。
它是由光源、透镜、主光栅码盘、鉴向盘、光敏元件和电子线路组成。
增量式光电编码器的工作原理是是由旋转轴转动带动在径向有均匀窄缝的主光栅码盘旋转,在主光栅码盘的上面有与其平行的鉴向盘,在鉴向盘上有两条彼此错开90o相位的窄缝,并分别有光敏二极管接收主光栅码盘透过来的信号。
光电编码器的计数方法

光电编码器的计数方法在位置控制系统中,为了提高控制精度,准确测量控制对象的位置是十分重要的。
目前,检测位置的办法有两种:其一是使用位置传感器,测量到的位移量由变送器经A/D转换成数字量送至系统进行进一步处理。
此方法虽然检测精度高,但在多路、长距离位置监控系统中,由于其成本昂贵,安装困难,因此并不适用;其二是使用光电编码器[1]。
光电编码器是高精度控制系统常用的位移检测传感器。
当控制对象发生位置变化时,光电编码器便会发出A、B两路相位差90度的数字脉冲信号。
正转时A超前B90度,反转时B超前A90度。
脉冲的个数与位移量成比例关系,因此通过对脉冲计数就能计算出相应的位移。
该方法不仅使用方便、测量准确,而且成本较低,因此在电力拖动系统中,经常采用第二种位置测量方法。
1 引言在位置控制系统中,为了提高控制精度,准确测量控制对象的位置是十分重要的。
目前,检测位置的办法有两种:其一是使用位置传感器,测量到的位移量由变送器经A/D转换成数字量送至系统进行进一步处理。
此方法虽然检测精度高,但在多路、长距离位置监控系统中,由于其成本昂贵,安装困难,因此并不适用;其二是使用光电编码器[1]。
光电编码器是高精度控制系统常用的位移检测传感器。
当控制对象发生位置变化时,光电编码器便会发出A、B 两路相位差90度的数字脉冲信号。
正转时A超前B90度,反转时B超前A90度。
脉冲的个数与位移量成比例关系,因此通过对脉冲计数就能计算出相应的位移。
该方法不仅使用方便、测量准确,而且成本较低,因此在电力拖动系统中,经常采用第二种位置测量方法。
使用光电编码器测量位移,准确无误的记数起着决定性作用。
由于在位置控制系统中,电机既可以正转,又可以反转,所以要求计数器既要能够实现加计数,又要能够实现减计数。
相应的计数方法可以用软件来实现,也可以用硬件来实现。
使用软件方式对光电编码器的脉冲进行方向判别和计数降低了系统控制的实时性,尤其当使用光电编码器的数量较多时,并且其可靠性也不及硬件电路。
光电编码器的工作原理和应用电路
光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
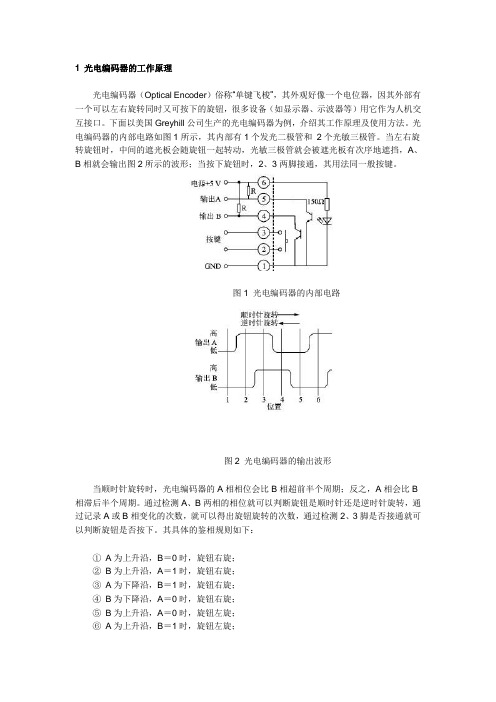
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
光电编码器
1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
图1 光电编码器的内部电路图2 光电编码器的输出波形当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B 相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:①A为上升沿,B=0时,旋钮右旋;②B为上升沿,A=1时,旋钮右旋;③A为下降沿,B=1时,旋钮右旋;④B为下降沿,A=0时,旋钮右旋;⑤B为上升沿,A=0时,旋钮左旋;⑥A为上升沿,B=1时,旋钮左旋;⑦B为下降沿,A=1时,旋钮左旋;⑧A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
鉴相
编码器倍频、鉴相电路在FPGA中的实现作者:张宝泉,杨世兴,赵永秀时间:2006-12-03 来源:edi摘要:VHDL是系统设计领域最佳的硬件描述语言。
文章针对用于位置与速度反馈测量的光电编码器信号的特点,介绍了运用VHDL在FPGA中实现编码器倍频、鉴相电路的方法,它对提高编码器分辨率与实现高精度、高稳定性的信号检测及位置伺服控制具有一定的现实意义。
关键词:编码器;倍频;鉴相;FPGA;VHDL0引言VHDL诞生于1982年,于1987年被IEEE和美国国防部确认为标准的硬件描述语言,即IEEESTD1076。
HDL主要用于描述数字系统的结构、行为、功能和接口。
与其它的硬件描述语言相比,VHDL具有更强的行为描述能力,因而成为系统设计领域最佳的硬件描述语言。
FPGA(现场可编程门阵列,Field Programmable Gate Array)器件集成度高,体积小,具有通过用户编程实现专门应用的功能。
采用FPGA器件可以将原来的电路板级产品集成为芯片级产品,从而降低功耗,提高可靠性,同时还可以方便地对设计进行在线修改。
目前,VHDL语言已经成为FPGA设计输入的主要方法之一。
本文即运用VHDL设计输入方法在FPGA中实现编码器的倍频、鉴相电路。
1在FPGA中实现倍频、鉴相电路的优越性在数控系统和工业机器人控制系统及一些使用光电编码器作为位置反馈和速度反馈组成的系统中,总是要用到对光电编码器(或光栅)的输出脉冲进行倍频、鉴相的电路,如图1所示。
其目的是提高位置分辨率,获取电机的实际转动方向(或工作台移动方向),提高抗干扰能力。
而在以往的控制系统中经常用由RC电路及门电路构成的倍频、鉴相电路,该电路体积大且稳定性、可靠性差、调试烦琐,而且当电阻、电容等组件参数变化时,会导致脉宽发生变化或不能产生具有稳定宽度的脉冲。
此外,RC电路抗干扰能力差,反馈部分易受外界的干扰,在实际应用中会出现丢失脉冲现象,以至影响控制系统的精度和可靠性。
光电编码器的原理与应用
光电编码器的原理与应用0引言光电编码器是一种旋转式位置传感器,在现代伺服系统中广泛应用于角位移或角速率的测量,它的转轴通常与被测旋转轴连接,随被测轴一起转动。
它能将被测轴的角位移转换成二进制编码或一串脉冲。
光电编码器分为绝对式和增量式两种类型。
增量式光电编码器具有结构简单、体积小、价格低、精度高、响应速度快、性能稳定等优点,应用更为广泛。
在高分辨率和大量程角速率/位移测量系统中,增量式光电编码器更具优越性。
绝对式编码器能直接给出对应于每个转角的数字信息,便于计算机处理,但当进给数大于一转时,须作特别处理,而且必须用减速齿轮将两个以上的编码器连接起来,组成多级检测装置,使其结构复杂、成本高。
1增量式编码器1.1增量式光电编码器的结构增量式编码器是指随转轴旋转的码盘给出一系列脉冲,然后根据旋转方向用计数器对这些脉冲进行加减计数,以此来表示转过的角位移量。
增量式光电编码器结构示意图如图1所示。
图1增量式光电码盘结构示意图光电码盘与转轴连在一起。
码盘可用玻璃材料制成,表面镀上一层不透光的金属铬,然后在边缘制成向心的透光狭缝。
透光狭缝在码盘圆周上等分,数量从几百条到几千条不等。
这样,整个码盘圆周上就被等分成n个透光的槽。
增量式光电码盘也可用不锈钢薄板制成,然后在圆周边缘切割出均匀分布的透光槽。
1.2增量式编码器的工作原理增量式编码器的工作原理如图2所示。
它由主码盘、鉴向盘、光学系统和光电变换器组成。
在图形的主码盘(光电盘)周边上刻有节距相等的辐射状窄缝,形成均匀分布的透明区和不透明区。
鉴向盘与主码盘平行,并刻有a、b两组透明检测窄缝,它们彼此错开1/4节距,以使A、B两个光电变换器的输出信号在相位上相差90°。
工作时,鉴向盘静止不动,主码盘与转轴一起转动,光源发出的光投射到主码盘与鉴向盘上。
当主码盘上的不透明区正好与鉴向盘上的透明窄缝对齐时,光线被全部遮住,光电变换器输出电压为最小;当主码盘上的透明区正好与鉴向盘上的透明窄缝对齐时,光线全部通过,光电变换器输出电压为最大。
光电编码器的工作原理和应用电路
光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
编码器的工作原理介绍
编码器的工作原理介绍一、光电编码器的工作原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90°的两路脉冲信号。
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
(一)增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
(二)绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。
目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2004-12-10作者简介:孙祥明(1979-),男(汉族),山东日照人,硕士,主要从事机电系统测量与控制方面的研究。
文章编号:100025870(2005)0420091204编码器换向误码输出原因探讨及鉴相电路改进孙祥明,齐明侠,沈 蓉(中国石油大学机电工程学院,山东东营257061)摘要:从编码器的结构特点出发,探讨了编码器频繁换向时输出信号中存在误码脉冲的原因。
根据编码器输出信号不能同时跳变的特点,设计了一种更简单有效的双向触发鉴相电路。
该电路通过标记两相输出信号跳变时刻的状态,经过一定的逻辑与运算,有效地滤除了输出信号中存在的误码脉冲。
经实验室应用证明,该电路具有较好的误码滤除效果,为编码器内部电路的改进及其输出信号的数字处理提供了一种新思路。
关键词:光电编码器;误码滤除;换向;鉴相电路;改进中图分类号:TM 131.45 文献标识码:ADiscussion about reasons for export errors with encoder alternatingdirection and phase discriminator ameliorationSUN Xiang 2ming ,Q I Ming 2xia ,SHEN Rong(College of Mechanical and Elect ronic Engineering in China U niversity of Pet roleum ,Dongying 257061,China )Abstract :Based on the structure of a photoelectric encoder ,the reason for errors a ppearing in export pulses was discussed when the encoder frequently alternates direction.A sim pler and more useful phase discriminator was designed because the export pulses can not change at the same time.This circuit marks the state of ex port pulses when one instantaneously changes ,to effectively filter the errors in export pulses by some logical calculation.The laboratory application of the filter 2circuit testifies that this circuit has preferable effect on filtering errors.And a new method is offered in order to im prove the inside circuit of encoder and deal with the pulses of encoder export in digital signal processing (DSP )chip.K ey w ords :photoelectric encoder ;error filtering ;alternation of direction ;phase discriminator ;amelioration 增量式光电编码器是一种测量精度较高的传感器[1]。
它可以将位移等物理量转变为数字脉冲信号,通过计算脉冲的个数,实现精确的位移测量[2]。
然而,当编码器输出信号中含有误码脉冲时,将会引起测量结果的失真。
因此,在计算脉冲个数之前,需要用鉴相方法滤除输出信号中存在的误码脉冲。
常用的鉴相方法可归结为两类:识别输出信号的变化次序[3],标记输出信号在跳变时刻的状态[4]。
前者在软、硬件实现的过程中都比较繁琐,而且耗费的资源也颇大,后者在硬件实现的过程中相对简单容易,但误码脉冲滤除质量不高。
为此,笔者在分析编码器输出信号存在误码脉冲原因的基础上,提出一种简单有效的双向触发鉴相方法,以有效滤除两相输出信号中的误码脉冲。
1 编码器输出信号中存在误码脉冲的原因分析1.1 编码器工作原理编码器内部光源产生平行光,透过编码器码盘上的窄缝,照射在光电管上,其内部电路将光信号转换为标准的脉冲信号,即是编码器的输出信号。
编码器码盘上有两列窄缝A 与B ,其位置相位差为90°,对应输出信号是A 相信号和B 相信号。
在工作中,A 相和B 相信号的状态只有4种组合形式,而且它们不能同时发生跳变。
在位移测量过程中,可以采用外部可逆计数器计算脉冲(A 相或B 相)的个数,但是编码器本身不能“记忆”其运行状态,需要鉴相部分来判别编码器2005年 第29卷 石油大学学报(自然科学版) Vol.29 No.4 第4期 Journal of the University of Petroleum ,China Aug.2005的旋转方向和确定计算器加减运算法则。
1.2 误码脉冲产生的原因为了说明误码脉冲的存在性,局部放大编码器码盘,如图1(a )所示。
图中点O 是编码器旋转轴的中心,粗黑色线段代表码盘上A 列和B 列透光狭缝。
假定编码器光源位于图1(a )所示的圆圈中央,光电管对应位于码盘的另一侧。
此时,编码器A 相信号处于高电平状态,而B 相信号处于高低电平跳变的交界状态。
由于编码器无锁定装置,其旋转轴易受外力(如风力、机械振动等)影响而产生小幅度的抖动[3]。
在透光狭缝(B 列)边缘的作用下,光电管(B 相)接收到的光信号将是交替变化的。
假定编码器旋转轴出现某种抖动状态,码盘上S 点在圆圈范围内运动,其输出信号的波形如图1(b )所示。
图1 编码器码盘局部放大图及其小幅抖动时输出信号的波形倘若采用鉴相方法Ⅰ,对图1(b )所示的脉冲信号进行处理,则编码器位移测量的结果是:可逆计数器一直进行加脉冲运算,编码器一直处于正向运转的状态。
实际上,编码器旋转轴基本未发生转动,这样位移测量结果就出现了失真。
由此可知,码盘狭缝边缘是编码器输出信号中产生误码脉冲的根源,不合理的鉴相方法是测量结果失真的催化剂。
码盘狭缝边缘是客观存在的物理结构,因此只能从编码器的鉴相方法入手,识别并消除输出信号中的误码脉冲,提取有效的计数脉冲信号,避免测量结果出现失真。
2 编码器鉴相方法改进2.1 鉴相方法Ⅰ鉴相方法Ⅰ是在B 相信号上升沿时刻检测A 相信号的状态:如果A 相信号为高电平,则编码器是正方向运转,可逆计数器在B 相信号下一个上升沿到来时进行加脉冲运算;当A 相信号为低电平时,编码器是反方向运转,可逆计数器在B 相信号下一个上升沿到来时进行减脉冲运算。
编码器鉴相方法Ⅰ的硬件实现如图2(a )所示。
它采用B 相信号上升沿触发的办法,由D 触发器74L S74第5管脚信号U 识别编码器的旋转方向;输出信号通过逻辑运算(并延时)后,获得信号CL K 送入计数器进行脉冲计算。
该鉴相电路的脉冲计数部分和相位辨别部分相互孤立,没有必要的牵制关系,致使部分误码信号参加了脉冲计算,造成了测量结果的失真。
鉴于这种思想,改进设计得到鉴相方法Ⅱ。
2.2 鉴相方法Ⅱ鉴相方法Ⅱ由输出信号单方向(上升沿或下降沿)的触发信息,得到判别编码器旋转方向的信号,同时与脉冲计数信号相互牵制,达到互锁的功能。
编码器鉴相方法Ⅱ的硬件实现如图2(b )所示。
它应用D 触发器74L S74上升沿触发,得到第5管脚和第6管脚信号分别与编码器输出信号进行逻辑运算,获得编码器的正向旋转U P 信号和逆向旋转DOWN 信号,送入计数器进行脉冲计算。
图2 两种鉴相方法的硬件电路图 图2(b )所示的鉴相电路,虽然具有互锁的功能,但不能有效地消除误码脉冲。
例如,当A 相信号一直处于低电平状态,而B 相信号中含有误码脉冲时,逆向旋转DOWN 信号中将出现大量的脉冲信号,编码器测量结果显然会出现失真的情况。
通过分析可知,鉴相方法Ⅰ和鉴相方法Ⅱ的共同缺点是判别编码器旋转方向的信号都来源于B相脉冲单方向(上升沿或下降沿)的触发。
有鉴于・29・石油大学学报(自然科学版) 2005年8月此,可以设计一种双向触发的鉴相方法Ⅲ。
2.3 鉴相方法Ⅲ鉴相方法Ⅲ是根据编码器输出信号不能同时跳变的性质,在B 相信号上升沿和下降沿时刻(即双向触发),分别检测A 相输出信号的状态,由此判别编码器旋转方向的信号,提取有效的计数脉冲。
编码器鉴相方法Ⅲ的硬件实现如图3所示。
其中A 和B 分别为光电编码器A 相和B 相输出信号,信号A BS 和A BX 分别为A 相信号在B 相信号上升沿和下降沿时刻的状态,信号U P 和DOWN 分别为可逆计数器正向、反向计数脉冲。
图3所示的鉴相电路采用了双D 触发器74L S74,上面的D 触发器用来检测A BS 的状态,而下面的D 触发器用来检测A BX 的状态。
应用三输入与非门74L S10确保信号A BS ≠A BX ,同时从B 相信号中提取编码器的正向旋转U P 信号和逆向旋转DOWN 信号。
图3 鉴相方法Ⅲ的硬件电路图倘若B 相信号中含有误码脉冲,会出现A BS =A BX 的情况。
此时,与非门74L S10输出端的U P 信号和DOWN 信号恒为高电平状态。
因此可知,它滤除了B 相信号中存在的误码脉冲,提取了有效的计数脉冲U P 信号和DOWN 信号。
在实际应用中,该鉴相电路工作正常,即便B 相信号中含有误码脉冲,编码器也不会出现测量失真的问题。
但是,当A 相信号中含有误码脉冲时,会频繁出现A BS ≠A BX 的状态,容易引起计数器错误运算。
因此,需要继续完善这种鉴相方法。
2.4 鉴相方法Ⅳ鉴相方法Ⅳ是在B 相信号(A 相信号)上升沿和下降沿时刻,分别检测A 相信号(B 相信号)的状态,由此通过一定的逻辑运算,滤除编码器两相输出信号中存在的误码脉冲,并提取有效的计数脉冲。
它不是由鉴相方法Ⅲ进行简单的两相叠加,而是同时捕捉两相信号跳变时刻的状态,通过逻辑运算进行相互牵制、制约。
编码器鉴相方法Ⅳ的硬件实现如图4所示。
其中信号IA 、IB 分别为A 相信号和B 相信号的取反,信号A BS 为A 相信号在B 相信号上升沿时刻的状态,信号 A BX 是A 相信号在B 相信号下降沿时刻状态的取反,信号B AS 为B 相信号在A 相信号上升沿时刻的状态,信号 B AX 是B 相信号在A 相信号下降沿时刻状态的取反,信号HA 、HB 分别是从A 相信号和B 相信号提取的计数脉冲信号。