接触网腕臂计算模型
腕臂计算(1)

武九支柱腕臂计算(中间柱)【单腕臂】一.计算条件1.需要测量的数据(1)现场实测的斜率值X1(斜率仪测量)之后需转换成斜率的转换值f=(80-68*2+X1)/1000,其中80为垂直线路侧的斜率,68为顺线路方向的斜率;(【】)(2)侧面限界CX;(3)线路超高h1(曲外为正,曲内为负)之后需算出接触线距线路中心c=a-m的值,c=a-h1*H/L,其中H为导线高度6450,L为两轨间距1435;2.图纸上给定的数据(1)导线高度和结构高度分别为6450和1400;(2)拉出值:直线一般是±300;曲外一般为+150,曲内一般为-150;(3)混凝土支柱H78、H93的总高是9.2+3,其中:埋深至钢轨的距离是3950,但考虑到支柱下陷,以3970进行腕臂计算;3.材料上量出的数据(1)上底座通长130,但支柱在埋深不够的情况下,所采取的孔外装时另需外加60的槽钢厚度,即算190;(2)下底座通长100,和上底座的一样,孔外装时另需外加60的槽钢厚度,即算160;(3)P棒瓷通长840(双重绝缘);单重绝缘740(4)X棒瓷通长790(双重绝缘);单重绝缘690(5)承力索座至P腕臂的边缘距离为88;(6)五孔套管双耳中心至P腕臂的边缘距离为74;4.技术参数(1)上、下底座之间的距离1750(支柱)〖小限界时,也需调整为1550左右〗;【2500的吊柱通常是1550】(2)定位器坡度400(矩形(限位)定位器),也就是定位点至定位管中心的距离;【站线定位器通常取300】(3)五孔套管双耳中心至承力索座中心的距离300〖小限界时,需调整为350〗,而承力索座中心至P腕臂的边缘距离为350,其中二者之和为650〖小限界时,需调整为700〗;(4)由导线高度和结构高度分别为6450和1400,可得到下底座的为6450+1400-88-1750=6012【注:YHL的钢柱和孔外装的水泥柱的计算就按下底座至轨平面6012的位置进行安装和计算,上下底座间距1750的位置进行安装和计算】;○注根据不同的轨面连线至支柱标示【3900,即支柱底部外露的一孔和二孔中间的位置】(以轨面为基准)h2、支柱下底至钢轨连线,即支柱埋深3950(计算时:以3970为计)和以3900为基准可计算出下底座的安装高度h为6012+3970-(3900-h2)=?,这时更需注意以6012上下浮动200的范围内都采用孔内装,反之,若超过时,则采用孔外装。
广清城轨接触网中间柱腕臂及腕臂支撑计算
2020年20期方法创新科技创新与应用Technology Innovation and Application广清城轨接触网中间柱腕臂及腕臂支撑计算周国维(广州地铁集团有限公司,广东广州510000)1概述接触网腕臂组装是电气化接触网施工中的一项关键工序,而腕臂预配计算是腕臂组装中的重点和难点。
能否准确计算及预配腕臂,使腕臂组装能一次到位,直接影响电气化施工效率。
在广清城轨接触网施工过程中,存在由腕臂支撑过长导致的腕臂支撑与腕臂夹角不符合要求,腕臂支撑与平腕臂绝缘子、定位环距离过小等问题,本文就此类问题对接触网中间柱腕臂及腕臂支撑计算方法进行探讨,为接触网问题整改提供参考。
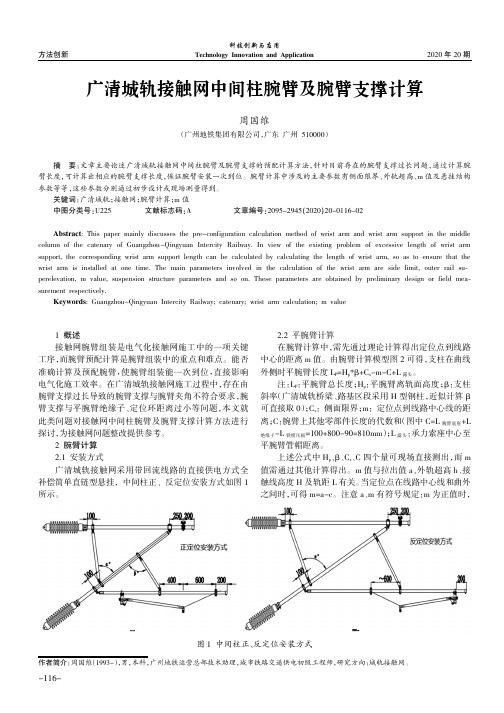
2腕臂计算2.1安装方式广清城轨接触网采用带回流线路的直接供电方式全补偿简单直链型悬挂,中间柱正、反定位安装方式如图1所示。
2.2平腕臂计算在腕臂计算中,需先通过理论计算得出定位点到线路中心的距离m 值。
由腕臂计算模型图2可得,支柱在曲线外侧时平腕臂长度L P =H p *β+C x -m-C+L 露头。
注:L P :平腕臂总长度;H p :平腕臂离轨面高度;β:支柱斜率(广清城轨桥梁、路基区段采用H 型钢柱,近似计算β可直接取0);C x :侧面限界;m :定位点到线路中心线的距离;C :腕臂上其他零部件长度的代数和(图中C=L 腕臂底座+L 绝缘子-L 铁模压板=100+800-90=810mm );L 露头:承力索座中心至平腕臂管帽距离。
上述公式中H p 、β、C x 、C 四个量可现场直接测出,而m 值需通过其他计算得出。
m 值与拉出值a 、外轨超高h 、接触线高度H 及轨距L 有关。
当定位点在线路中心线和曲外之间时,可得m=a-c 。
注意a 、m 有符号规定:m 为正值时,摘要:文章主要论述广清城轨接触网中间柱腕臂及腕臂支撑的预配计算方法,针对目前存在的腕臂支撑过长问题,通过计算腕臂长度,可计算出相应的腕臂支撑长度,保证腕臂安装一次到位。
简统化接触网腕臂装配施工技术
简统化接触网腕臂装配施工技术摘要:简统化接触网腕臂装配在国内属于新兴产品,目前还在试用阶段,通过分析零部件的结构和设计要求,运用数学原理理论和现场实作研究,实现了简统化接触网腕臂装配施工技术的成功运用。
关键词:简统化接触网;腕臂装配;施工技术引言多年来,由于历史原因,国内电气化铁路普遍使用的接触网腕臂装配系统,一直学习或引进其他国家的相关技术,在结构设计、零部件选用制造、施工工艺上各有所长,形成了目前接触网参数不统一、安装结构样式繁多、零部件规格形式多样化、零部件材质标准不统一、装备服役性能不高的现状。
随着电气化铁路运营维护过程中悬挂状态检测监测装置的广泛应用,对接触网腕臂装配系统提出了简单化统一化的新要求。
总结我国接触网的现状技术标准、消化吸收国外先进技术和理念、结合接触网运营维护中智能检测监测的发展要求,简统化接触网腕臂装配应用而生。
1 工程概况浩吉铁路线路北起内蒙古鄂尔多斯境内浩勒报吉站,终止于京九铁路吉安站,全长1814.4公里,线路等级Ⅰ级,为客货共线铁路,客车速度目标值120km/h,货车速度目标值90km/h。
简统化接触网试验段设置在浩吉铁路单线区段的乌审召站(含)至布寨站(不含)范围内,正线全长55公里。
简统化接触网装备应用范围为钢材质腕臂装配。
2 简统化接触网腕臂装配的结构特点与传统的接触网装备系统相比,国内自主创新的“简统化”装备腕臂零部件数量可减少39% ,紧固件数量减少33%,紧固力矩种类减少50%,安装工作时间减少约1/3,大大提高了施工及运营维护的工作效率,为统一标准装备、智能识别零部件故障提供了基础。
装配零部件、各零部件连接螺栓数量较常规接触网腕臂装配要少,节约零部件的安装和装配的组装时间,节约人力。
结构简单统一,方便作业人员记忆和熟练操作,施工操作简便快捷。
装配采用三角水平腕臂结构和轻型非限位弓形定位装置,安装操作简单,弓网匹配性好。
所有零部件采用采用翻边铆接结构,拆装操作较常规零部件简单,定位连接处采用了铰接型式固定,提升了转动自由度。
腕臂装置的预配及计算.
第一节腕臂支柱的装配腕臂支柱的装配是指腕臂支持装置在支柱上部的装配。
即指定位装置、腕臂和支柱组合的形式。
支持装置中以腕臂支持装置应用最广泛,所以腕臂支柱装配是接触网结构的主要组成部分。
我国采用的支柱装配的结构形式较多,早期引进的前苏联的技术,近一时期引进了法国和德国的技术,也曾引进过日本的技术。
不同的国家采用的悬挂形式和腕臂结构形式各不相同,本书介绍京沪线电气化铁路腕臂装配形式。
一、腕臂支柱装配的要求腕臂支柱装配安装图应满足以下几点要求:1、接触线正常工作高度箱区段一般为6450mm,困难地段不小于6330mm,其它地段以设计为准;2、接触线的拉出值,直线区段一般为300mm;3、接触悬挂的结构高度,一般为1400mm,有变化时见平面图附注;4、支柱的侧面限界区间满足大机养道要求,一般为3.1m;5、最小绝缘距离,一般要求不小于500mm。
困难时不小于300mm。
二、腕臂底座的选用京沪线所有腕臂底都为孔外安装,对双底座的要求为:道岔柱为1200mm长双底座,所有转换柱、中心柱为1600mm长双底座。
腕臂底座的有关接触网腕臂安装图有:1、接触网腕臂安装图第一册腕臂安装单线图[京沪电化徐沪施(网)-050000],可根据平面布置图查本图,再根据本图查腕臂安装图。
2、接触网锚段关节、线岔平面图[京沪电化徐沪施(网)-040000],根据本图可以了解关节的平面布置和立面布置的有关设计。
下面是京沪线各种锚段关节平面、立面图的示意图。
四跨绝缘关节立面示意图四跨绝缘关节平面示意图五跨绝缘关节立面示意图四跨非绝缘关节立面示意图四跨非绝缘关节平面示意图六跨带中性区双绝缘关节电分相平、立面示意图3、接触网腕臂安装图 第二册 [京沪电化徐沪施(网)-050000],根据本图可直接查出所需零件及安装要求。
接触网平面布置图的安装图号为单线图号,在应用过程中应从单线图中查腕臂安装图。
下面分别介绍正线(R ≥4500m 段的中间柱(050101)和正线直线段的锚段关节(050201)单线图,以及怎样从单线图中查腕臂安装图。
接触网腕臂装配
直线非绝缘转换柱非支腕臂计算查对表 直线非绝缘转换柱的装配图
加支柱斜率后的 侧面限界 2.5m 2.6m 2.7m 理论腕臂长度 3.394 3.466 3.538 腕臂净长度 2494 2566 2638
2.8m
2.9m
3.612
3.688
2712
2788
3.0m
3.1m 3.2m
3.764
3.842 3.920
2.5m
2.6m 2.7m
3265
3340 3421
2365
2440 2521
1850
1950 2050
2.8m
2.9m
3.0m 3.1m
3500
350
2681
2762 2844
2150
2250
2350 2450
3.2m
3828
2928
2550
[直线区段与曲线区段中间柱腕臂的装配 ]
3.1m 3.2m
3.932
4.008 4.084
3.032
3.108 3.184
直线绝缘转换柱非支腕臂计算查对表
[转换柱、中心柱、道岔柱腕臂装配的了解]
L型、Y型、LY型道岔柱的装配图
接触网腕臂装配
主要内容
腕臂的测量、计算 直线区段与曲线区段中间柱 腕臂的装配
转换柱、中心柱、道岔柱腕臂装 配的了解 立柱
[腕臂的测量、计算]
第一条
判断支柱类型 标画轨平面标准线
通过轨面标准线来确定腕臂底座 和水平拉杆的位置
测量出支柱顶部和轨平面处支柱边沿的距离, 并计算出支柱的斜率(直线柱、曲外柱、 曲内柱在立柱时都应直立)
第二条
腕 臂 测 量 方 法 第三条
接触网腕臂计算论文

中铁建电气局集团第三工程课题名称: 定位点和支柱位置的论述及腕臂计算项目部:XX指导老师:XX课题人:XX毕业学校:华东交通大学联系方式:XX定位点和支柱位置的论述及腕臂计算摘要本文主要论述腕臂计算,腕臂计算中涉及的参变量有限界、超高和支柱斜率等,这些参变量有的是通过现场测量得到,有的通过理论计算得到。
其中定位点到线路中心的距离m值就要通过理论计算才能得出,定位点位置变化直接影响m 值变化,所以定位点与m值的关系也是本文论述之一。
关键词:定位点; m值;腕臂计算Discussion on Positioning Point and Pillar Position and Cantilever CalculationABSTRACTThere are several calculation of catenary, the cantilever calculation is one of the keys. In order to obtain data corresponding to the wrist arm, we have to go through the actua measurement. For example, bounded, super high and pillar slope. The measurement data ar e relatively different from design values. So calculation of cantilevers is on the basis of t he actual data.We know that the length of wrist arm is A=l*δ+Cx+m+C. When the positioning point and pillar position changes, we are with M is it right? Of course not.For positioning point and pillar in different position, it should be a corresponding plus or minus M. This is what I want to focus on this discussion,when we should add or subtract M.Key Words:Positioning point;The pillar position;M;Calculation of cantilevers1 引言在接触悬挂系统中,接触网腕臂支持结构起到了支撑、定位并承受机械与电气荷载的作用。
接触网腕臂计算论文汇总

中铁建电气局集团第三工程有限公司课题名称: 定位点和支柱位置的论述及腕臂计算项目部:XX指导老师:XX课题人:XX毕业学校:华东交通大学联系方式:XX定位点和支柱位置的论述及腕臂计算摘要本文主要论述腕臂计算,腕臂计算中涉及的参变量有限界、超高和支柱斜率等,这些参变量有的是通过现场测量得到,有的通过理论计算得到。
其中定位点到线路中心的距离m值就要通过理论计算才能得出,定位点位置变化直接影响m 值变化,所以定位点与m值的关系也是本文论述之一。
关键词:定位点; m值;腕臂计算Discussion on Positioning Point and Pillar Position and Cantilever CalculationABSTRACTThere are several calculation of catenary, the cantilever calculation is one of the keys. In order to obtain data corresponding to the wrist arm, we have to go through the actua measurement. For example, bounded, super high and pillar slope. The measurement data ar e relatively different from design values. So calculation of cantilevers is on the basis of t he actual data.We know that the length of wrist arm is A=l*δ+Cx+m+C. When the positioning point and pillar position changes, we are with M is it right? Of course not.For positioning point and pillar in different position, it should be a corresponding plus or minus M. This is what I want to focus on this discussion,when we should add or subtract M.Key Words:Positioning point;The pillar position;M;Calculation of cantilevers1 引言在接触悬挂系统中,接触网腕臂支持结构起到了支撑、定位并承受机械与电气荷载的作用。
高速铁路接触网腕臂预配三维可视化系统计算模型及应用
8—
2 2. ·5 5计 计算 算斜 斜腕 脘 臂的长度 二 b.cosO)/cosO+ 2 ’P。
厶到低轨面的高度为
,
豢上式耄 撼.z ..+. Ⅳ .. ~, u  ̄1t ” l" 勰 cos d - f .si n O-I to' cos 80
厶鸢 与 点的垂直高差为 ~: ~ 儿 。
正 ,向线路侧倾斜时为负; 一支柱与铅垂线的夹角 ; 一承力索在
承力索座 内的中心坐标点; 一承力索座与平腕臂安装的中心坐标点
图 1 高 速 铁 路接 触 网腕 臂 装 配模 型
接触线 底 面距低 轨面高 度 ,如 图 2所 示 。
建 立腕臂 预 配计算 数学模 型 的关键 是确 定接 触 线底 面的横 坐标 ,、承力 索底座 与平腕 臂交点 的坐 标 、平腕 臂与 水平 面 的夹角 、平腕 臂 的长 度 、斜 腕 臂 的长度 、斜 腕臂 与水 平面 的夹 角 、定 位器 与水 平 面的夹 角 和定 位管在 斜腕臂上 安装位置 等 2.1 接 触线底 面的横坐标
连线的沿长线与套管双耳 的交叉坐标点 ;厶—套管 双耳竖直方 向与斜
腕臂的交叉坐标 点; —套管双耳与斜腕臂 的安装坐标点 ; 一定位
管 吊线 与 吊线卡子安装 坐标 点; 吊线卡子与定位管 的安 装坐标
点 ; 一定位 器与定位线夹的安装坐标点 ;G厂一定位线夹 与接触线
的安装坐标点 ;
(a)曲外反定位 /曲内正定位
一 接触线底 面在坐标系 中的坐标点 ; 一接触线在水平方 向上与 经过 z点垂直于轨平面的平面的交叉 坐标点 ; 一接触线存竖直面 上 的投影坐标点 ; 一接触线在经过 z点垂直于轨平 面的平面上的 投 影 坐 标 点 ;z一轨 平 面 上 线 路 中心 坐 标 点 ;Z1一 水平 面上 线 路 中 心 坐标点 ; 一外轨超高角 ; _Z点 和 点连线与经过 z点垂直于轨 平 面 的 平 面 的夹 角
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
腕臂计算模型
1、平腕臂低头52mm时与水平线夹角为1度,对平腕臂长度影响为0.3mm,忽略不计;
2、斜腕臂计算以下三角直角三角形计算,其中A、B值按下面方法求得;
3、测量数据为:支柱侧面限界CX、线路超高h、支柱斜率&。
4、已知参数:上底座高度:Hs=7372(7822),上下底座间距1750,线间距1440,定位器开口400(350、250);
5、材料数据:(上下)底座长度200;棒式绝缘子长度860-85(750-85),承力索座高度80,定位环长度50;
6、图纸数据:导高6000(6450),拉出值a,结构高度
7、平腕臂计算:
计算总长:CXZC=CX+Hs×&-M+200(腕臂头外露)
腕臂复核:CXFH=CXZC-200(底座扣料)
腕臂下料:PWBXL=CXFH-860(双重绝缘860,普通750)+85(套筒长度)
承力索座:CLSZ=WBXL-200-30(承力索座半宽)
套管双耳wb:TGwb=WBXL-500-30(套管双耳半宽)
套管双耳zc:TGzc=150-30(套管双耳半宽)
8、斜腕臂计算:
直角边A:A=TGwb+30(套管双耳半宽)+860(双重绝缘860,普通750)-85(套筒长度)-1.75&(斜率差)
直角边B:B=1750(底座间距)-50(此处腕臂低头折算值)-80(套管双耳扣料长度)
斜腕臂复核长度:XWBFH=SQRT(A^2+B^2)
斜腕臂下料长度:XWBXL=XWBFH-860+85
定位环位置:DWH=(6000+400-5622)×XWBFH÷A-860+85
腕臂支持套管双耳位置:XTGZC= XWBXL -TGwb+150+85
定位管支持套管双耳位置:TGDWZC= XTGZC+410(定位管支撑长度)+80(套管双耳扣料长度)
9、定位管上计算:
正定位定位管长度:ZDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+600(防风拉线长度)+200(定位管外露长度)
反定位定位管长度:FDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+1200(1050定位器长度)+200(定位管外露长度)
正定位管上定位环位置:ZGSDWH=ZDWGC-1200(1050定位器长度)-600-200
反定位管上定位环位置:FGSDWH=FDWGC-200
正定位防风拉线定位环位置:ZFFDWH= ZGSDWH-200
正定位防风拉线定位环位置:FFFDWH= FGSDWH-1200(1050定位器长度)-600-200。