电气控制技术 课程设计 PLC小车运动控制
小车自动往返控制PLC课程设计
小车自动往返控制PLC课程设计一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本原理和结构,掌握其在小车自动往返控制系统中的应用。
2. 学生能掌握基本的逻辑控制语句和程序设计方法,实现对小车的自动往返控制。
3. 学生能了解传感器的工作原理,并将其应用于PLC控制系统中,实现小车行进中的障碍物检测和避让。
技能目标:1. 学生能运用PLC编程软件进行程序设计,实现小车自动往返控制的功能。
2. 学生能通过实际操作,调试和优化PLC控制程序,提高小车的运行效率和稳定性。
3. 学生能运用相关工具和仪器进行电路搭建和故障排查,培养实际操作能力和问题解决能力。
情感态度价值观目标:1. 学生通过课程学习,培养对自动化技术和PLC控制系统的兴趣,激发创新意识和探索精神。
2. 学生在小组合作中,学会沟通与协作,培养团队精神和责任感。
3. 学生能够关注PLC技术在工业生产和日常生活中的应用,认识到科技对社会发展的推动作用,树立正确的价值观。
课程性质:本课程为实践性较强的课程,注重理论知识与实际操作的结合,培养学生动手能力和创新能力。
学生特点:学生为高年级学生,具备一定的电子技术基础和编程能力,对新技术和新知识有较高的学习热情。
教学要求:教师需结合学生特点,采用任务驱动法、案例教学法和小组合作法等教学方法,引导学生主动探索,提高课程教学效果。
同时,注重过程评价,关注学生知识掌握和技能提升,培养其情感态度价值观。
通过分解课程目标为具体学习成果,便于后续教学设计和评估。
二、教学内容1. PLC基础知识:包括PLC的组成、工作原理、编程语言及编程软件的使用,重点讲解与小车自动往返控制相关的基础知识。
- 教材章节:第一章 PLC概述,第二章 PLC组成与工作原理,第三章 编程语言与编程软件。
2. 逻辑控制语句:介绍PLC常用的逻辑控制语句,如与、或、非、定时器、计数器等,通过实例分析,让学生掌握逻辑控制语句的应用。
PLC小车控制
台车控制系统功能的实现一、实验的目的1、用PLC实现台车的呼车控制系统的功能;2、熟悉应用指令的使用方法和编程应用。
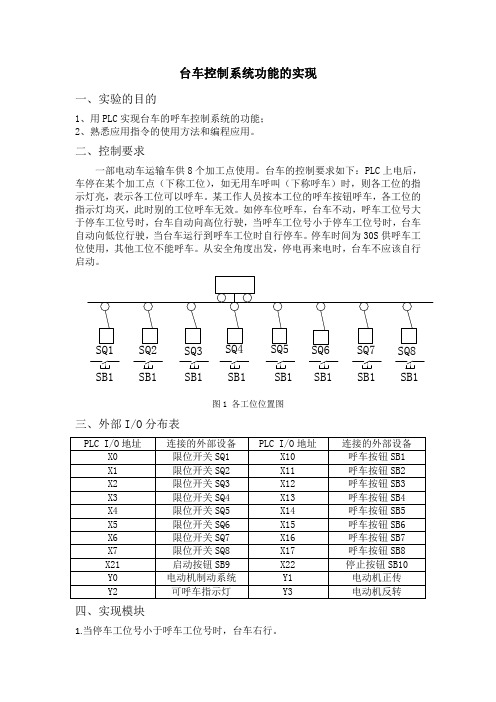
二、控制要求一部电动车运输车供8个加工点使用。
台车的控制要求如下:PLC上电后,车停在某个加工点(下称工位),如无用车呼叫(下称呼车)时,则各工位的指示灯亮,表示各工位可以呼车。
某工作人员按本工位的呼车按钮呼车,各工位的指示灯均灭,此时别的工位呼车无效。
如停车位呼车,台车不动,呼车工位号大于停车工位号时,台车自动向高位行驶,当呼车工位号小于停车工位号时,台车自动向低位行驶,当台车运行到呼车工位时自行停车。
停车时间为30S供呼车工位使用,其他工位不能呼车。
从安全角度出发,停电再来电时,台车不应该自行启动。
SB1SB1SB1SB1SB1SB1SB1SB1图1 各工位位置图三、外部I/O分布表四、实现模块1.当停车工位号小于呼车工位号时,台车右行。
如梯形图1所示,如果有人在工位7呼车时,那么台车的停车位可能位于工位1和工位6之间的任何一个工位处,此时电动机正转,台车右行。
梯形图1依次类推,当停车工位号小于呼车工位号时,台车均右行。
2.当停车工位号大于呼车工号时,台车左行。
如梯形图2所示,如果有人在工位2呼车时,那么台车的停车位可能位于工位3和工位7之间的任何一个工位处,此时电动机反转,台车左行。
梯形图2依次类推,当停车工位号大于呼车工位号时,台车均左行。
本程序的难点在于如何设计停止程序使得台车在运行时按下停止按钮,台车不立即停止,当台车运行到下一工位时停止。
梯形图3如梯形图3所示,通过利用辅助继电器可以实现台车在运行过程中按下停止按钮,台车不立即停止,当台车运行到下一工位时停止。
五、可以实现目的的梯形图。
电气控制技术 课程设计 PLC小车运动控制
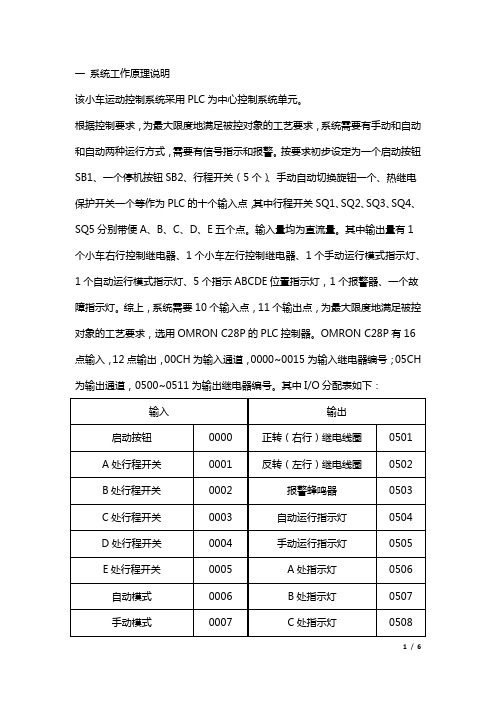
一系统工作原理说明该小车运动控制系统采用PLC为中心控制系统单元。
根据控制要求,为最大限度地满足被控对象的工艺要求,系统需要有手动和自动和自动两种运行方式,需要有信号指示和报警。
按要求初步设定为一个启动按钮SB1、一个停机按钮SB2、行程开关(5个)、手动自动切换旋钮一个、热继电保护开关一个等作为PLC的十个输入点,其中行程开关SQ1、SQ2、SQ3、SQ4、SQ5分别带便A、B、C、D、E五个点。
输入量均为直流量。
其中输出量有1个小车右行控制继电器、1个小车左行控制继电器、1个手动运行模式指示灯、1个自动运行模式指示灯、5个指示ABCDE位置指示灯,1个报警器、一个故障指示灯。
综上,系统需要10个输入点,11个输出点,为最大限度地满足被控对象的工艺要求,选用OMRON C28P的PLC控制器。
OMRON C28P有16点输入,12点输出,00CH为输入通道,0000~0015为输入继电器编号;05CH 为输出通道,0500~0511为输出继电器编号。
其中I/O分配表如下:PLC的外部接线、系统梯形图、系统主电路图见附录。
系统工作原理:手动和自动模式切换通过旋钮切换,小车在A处时系统才可以开始运行。
结合主电路,继电器KM1控制小车右行,继电器KM2控制小车左行,两继电器内有联锁,任何状态下只会有一个继电器工作。
自动状态下,小车行驶到每一个指定点,相应的PLC时间继电器将开始计时,并将上一个时间继电器关闭,2秒后,该时间继电器控制小车右行,当小车到下一个点依次循环。
小车的右行是通过时间继电器控制的,任何一个时间继电器计时时间到均会使小车右行,由于时间继电器之间有联锁,任何时候只会有一个时间继电器工作。
当到达E点并且2秒定时到后KM2线圈工作主电路器主触点闭合,KM1断电,实现了小车的左行,左行过程中只有当A点行程开关按下时才会是小车停车。
到达A点后计数器减1,并且2秒小车又开始右行直到计数器减到为0才使小车完全停止。
plc往返小车课程设计

plc往返小车课程设计一、课程目标知识目标:1. 理解PLC(可编程逻辑控制器)的基本原理和功能;2. 掌握PLC编程的基本指令和程序设计方法;3. 了解往返小车的工作原理及与PLC的连接方式;4. 学习传感器的应用,并能将其与PLC结合进行控制。
技能目标:1. 能够独立完成PLC的编程,实现往返小车的运动控制;2. 能够运用所学知识分析和解决实际问题,如调整小车运行速度、改变运行路径等;3. 学会使用相关工具和仪器,如编程软件、传感器调试等;4. 培养团队协作和沟通能力,通过与同学合作完成课程任务。
情感态度价值观目标:1. 培养学生对自动化技术的兴趣,激发学习热情;2. 增强学生的实践操作能力,培养勇于尝试、不断探索的精神;3. 培养学生的创新意识,鼓励他们在课程设计中提出新的想法;4. 培养学生的安全意识,了解并遵循实验室操作规程,确保人身和设备安全。
课程性质:本课程为实践性课程,侧重于PLC编程与往返小车控制的实际应用。
学生特点:学生具备一定的电子、电气基础知识,对PLC和自动化技术有一定了解,但对实际操作和编程尚缺乏经验。
教学要求:结合学生特点,注重理论与实践相结合,以学生动手实践为主,教师引导为辅,培养学生的实际操作能力和创新能力。
通过课程学习,使学生能够达到上述课程目标,并为后续相关课程打下坚实基础。
二、教学内容1. PLC基本原理及功能介绍:包括PLC的定义、发展历程、结构组成、工作原理等,使学生建立对PLC的整体认识。
教材章节:第一章《PLC概述》2. PLC编程基本指令学习:讲解PLC编程的基本指令,如逻辑运算、定时器、计数器等,并举例说明。
教材章节:第二章《PLC编程指令》3. 往返小车的结构与工作原理:介绍往返小车的结构、部件功能及其与PLC 的连接方式。
教材章节:第三章《PLC控制系统设计》4. PLC编程与往返小车控制:结合实际案例,教授如何使用PLC编程实现往返小车的启动、停止、往返运行等功能。
基于PLC的小车运动控制系统设计
长沙学院CHANGSHA UNIVERSITY 专业综合设计报告系部:专业年级班级:学生姓名:学号:成绩评定:(指导教师填写)2014年1 月2010届电气专业综合设计任务书系(部):电子与通信工程系专业:电气工程及其自动化学生姓名指导教师课题名称基于PLC的小车运动控制系统设计内容及任务一、设计内容小车以慢速左行(右行)5s后稳定,稳定后速度变为快速。
其中,当小车到达左限位(右限位)时,小车向相反的方向运行,如此往返运行。
而且,在稳定后能实现小车高低速、左右行的自由切换。
同时,当按下停止按钮,电机不管出于任何运动状态,都必须立即停止。
二、设计任务1、确定PLC的输入设备(包括按钮、行程开关等)、输出设备(包括接触器线圈、指示等),选择电器元件型号,列出明细表。
2、对PLC的输入输出通道进行分配,列出I/O通道分配表(包括I/O编号、设备代号、设备名称及功能),画出I/O接线图。
根据工艺要求,将所需的定时器、计数器、辅助继电器等也进行分配。
3、画出功能表图;4、进行PLC控制系统的软件设计,画出梯形图。
对编制的梯形图进行调试,直到满足要求为止。
长沙学院课程设计鉴定表企业现代化生产规模的不断扩大和深化,使得生产物的输送成为生产物流系统中的一个重要环节。
运料小车自动控制正是用来实现输送生产物的控制系统,随着PLC的发展,国外生产线上的运输控制系统非常广泛的采用该控制系统,而且有些制造厂还开发研制了出了专用的逻辑处理控制芯片,我国的大部分工控企业的小车自动控制系统都是从外引进的,成本高,为了满足现代化生产流通的需要,让PLC技术与自动化技术相结合,充分的利用到我国的工控企业生产线上,让该系统在各种环境下都能够工作,而且成本低,易控制,安全可靠,效率高。
本设计在分析小车自动控制系统的结构和工作基本过程的基础上,介绍了基于PLC的小车自动控制系统的设计过程,详细阐述了系统的硬件和软件设计。
给出了控制系统主电路接线图、PLC硬件接线图、指令表、梯形图等。
PLC课程设计---运料小车控制模拟
1 概述1.1 PLC的基本概念在PLC的发展过程中,美国电器制造商协会(NEMA)经过四年的调查,于1980年把这种新型的控制器正式命名为可编程控制器(Programmable Controller),英文缩写为PC,并且作如下定义:“可编程控制器是一种数字运算操作的是的电子系统,专为在工业环境下应用而设计。
它使用可编程序的存储器来存储指令,用来在其内部存储执行逻辑运算,顺序控制,计数,计时和算术运算等操作的指令。
并且通过数字式和模拟式的输入和输出,控制各种类型的机械或生产过程。
PLC及其有关外部设备,都应按易于与工业系统联成一个整体,易于扩充其功能的原则设计。
”定义强调了PLC应直接应用于工业环境,它必须有很强的抗干扰能力,广泛的适应能力和应用范围。
这是区别于一般微机控制系统的一个重要特征。
1.2 PLC的发展PLC自问世以来,经过40多年的发展,在美,德,日等工业发达的国家已成为重要的产业之一。
世界总销售额不断上升,生产厂家不断涌现,品种不断翻新,产量产值大幅度上升而价格不断下降。
目前,世界上有200多个厂家,较有名的公司有美国:AB通用电气,莫迪康公司;日本:三菱,富士,欧姆龙,松下电工等:德国:西门子公司;法国:TE施耐德公司;韩国:三星,LG公司等。
1.3 PLC的发展趋势(一)大型化为适应大规模控制系统的要求,大型PLC向着大存储容量,高速度,高性能,增加I|O点数的发展方向。
主要表现在以下几个方面:1.增强网络通信功能:;2.发展智能模块;3.外部故障诊断功能;4.编程语言、编程工具标准化、高级化5.实现软件、硬件标准化6.编程组态软件发展迅速(二)小型化发展小型PLC,其目的是为了占领广大的、分散的、中小型的工业控制场合,使PLC不仅成为继电器控制柜的替代物,而且超过继电器控制系统的功能。
小型PLC朝着简易化、体积小、功能强、价格低的方向发展。
1.4 PLC的主要功能1.开关量逻辑控制;2.模拟量控制;3.闭环过程控制;4.定时控制;5.计数控制;6.顺序(步进)控制;7.数据处理;8.通信和联网。
plc送料小车课程设计
plc送料小车课程设计一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本原理及其在工业自动化中的应用。
2. 学生能掌握送料小车系统的组成、工作原理及PLC程序设计的基础知识。
3. 学生能描述常用传感器的作用及其在送料小车系统中的应用。
技能目标:1. 学生能运用所学知识,独立设计简单的PLC控制程序,实现送料小车的基本运动控制。
2. 学生具备分析问题、解决问题的能力,能够针对送料小车系统进行故障排查及优化。
3. 学生能通过小组合作,完成送料小车系统的搭建和调试,提高团队协作能力。
情感态度价值观目标:1. 学生能够增强对自动化技术、PLC控制技术的兴趣,培养良好的学习习惯和探究精神。
2. 学生通过实践活动,体会科技给生活带来的便利,提高社会责任感和创新意识。
3. 学生在小组合作中,学会尊重他人意见,培养沟通能力和团队精神。
课程性质:本课程为实践性较强的课程,结合理论知识与动手操作,帮助学生更好地理解PLC送料小车系统。
学生特点:学生具备一定的电子、电气基础知识,对PLC控制技术有一定了解,但实践经验不足。
教学要求:教师应注重理论与实践相结合,引导学生通过小组合作、动手实践等方式,达到课程目标。
同时,关注学生的个体差异,提供个性化指导,确保每个学生都能在课程中收获成长。
二、教学内容1. 理论知识:- PLC基本原理及其在工业自动化中的应用。
- 送料小车系统的组成、工作原理。
- 常用传感器(如接近开关、光电开关等)的作用及在送料小车系统中的应用。
- PLC编程基础知识,包括逻辑运算、定时器、计数器等。
2. 实践操作:- 送料小车系统的搭建,包括PLC、传感器、执行器等设备的连接。
- PLC控制程序的设计与编写,实现送料小车的启动、停止、前进、后退等功能。
- 送料小车系统的调试,包括故障排查、优化程序等。
3. 教学大纲:- 第一阶段:PLC基本原理及送料小车系统组成、工作原理的学习。
- 第二阶段:常用传感器在送料小车系统中的应用学习。
运料小车的PLC控制
PLC技术及应用课程设计(论文)题目:运料小车的PLC控制院(系):电气工程学院专业班级:学号:指导教师:(签字)起止时间:2课程设计(论文)任务及评语院(系):电气工程学院教研室:自动化注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算摘要可编程控制器是一种新型的通用控制装置,它将传统的继电器-接触器控制技术、计算机技术和通讯技术融为一体,专门为工业控制而设计,这一新型的通用自动控制装置以其高可靠性、较强的工作环境适应性和极为方便的使用性能,深受自动化领域技术人员的普遍欢迎。
运料小车在现代化的工厂中普遍存在。
传统的工厂依靠人力推车运料,这样浪费了大量的人力物力,降低了生产效率。
本设计采用PLC控制运料小车,驱动设备为电动机,程序设计采用梯形图,小车往返于各个工位,使生产自动化,智能化,大大提高了生产效率,降低了劳动成本。
关键词:可编程控制器(PLC);自动控制;运料小车;目录第1章绪论 (1)第2章课程设计的方案 (2)2.1概述 (2)2.2系统组成总体结构 (2)第3章硬件设计 (4)3.1可编程控制器(PLC) (4)3.2PLC的选型 (5)3.3I/O地址分配表 (5)3.4PLC的外部接线 (6)第4章软件设计 (8)4.1运料小车控制系统流程图 (8)4.2运料小车控制系统梯形图 (9)第5章课程设计总结 (14)参考文献 (15)第1章绪论可编程控制器是在计算机技术、通信技术和继电器控制技术的发展基础上开发起来的,最初叫做可编程逻辑控制器(Programmable Logic Controller),即PLC,现已广泛应用于工业控制的各个领域。
它以微处理器为核心,用编写的程序不仅可以进行逻辑控制,还可以定时、计数和算术运算等,并通过数字量和模拟量的输入/输出来控制机械设备或生产过程。
20世纪60年代以前,汽车流水线的自动控制系统基本上都采用传统的继电器控制。
在60年代初,美国汽车制造业竞争越发激烈,而汽车的每一次更新的周期越来越短,这样对汽车流水线的自动控制系统更新就越来越频繁,原来的继电器控制就需要经常地重新设计和安装,从而延缓了汽车的更新间。
电气自动化毕业设计基于PLC的运料小车控制系统设计
摘要早期运料小车电气控制系统多为继电器—接触器组成的复杂系统,这种系统存在设计周期长、体积大、成本高等缺陷,无数据处理和通信功能,必须有专人负责操作,将PLC应用到运料小车电气控制系统,可实现运料小车的自动化控制,降低系统的运行费用,PLC运料小车电气控制系统具有连线简单,控制速度快,可靠性和可维护性好,易于安装、维修和改造等优点。
随着经济的发展,运料小车不断扩大到各个领域,从手动到自动,逐渐形成了机械化、自动化。
将PLC应用到运料小车电气控制系统,可实现运料小车的自动化控制,降低系统的运行费用。
通信和数据连接功能选项使得FX1N在体积、通信和特殊功能模块等重要的应用方面非常完美。
本课题主要包括:分析被控对象和明确系统控制要求、PLC选型、确定系统的I/O设备的数量及种类、控制流程设计、控制程序设计。
PLC在运料小车控制系统中的应用,已经在国内外工程、工厂中得到实际应用,具有巨大的经济和社会价值,其智能化和自动化的思路值得以后继续深入研究和推广。
关键词: PLC,运料小车,控制系统,I/O点ABSTRACTEarly electric car control system of the transporter over the relay - contactor complex system composed of The system design cycle, there is a long, bulky, high cost, defects, no data processing and communications functions, must be hand operated, will be applied to transport materials car PLC electrical control system and can realize automatic control operation of the car, reducing the running costs of the system, PLC control system for electric car transporter with a simple connection to control speed, reliability and maintainability is good, easy to install, repair and improvement and so on. With economic development, transport materials to various areas of growing car, from manual to automatic, and gradually formed the mechanization and automation.PLC applied to transport materials to car electrical control system and can realize automatic control operation of the car and reduce system operating costs. Communications and data connectivity options make FX1N in volume, communications and special function modules such important applications perfectly. The topics include: analysis of plant and a clear system control requirements; PLC selection; determine the system's I / O device number and type; control process design; control programming.PLC control system in the car transporter in the application, has been in domestic and international projects has been applied in the factory, with huge economic and social value, the intelligence and automation beyond the idea worthy of further research and extension.Key words :PLC,transporter cart,control system,I/O points目录摘要 (I)ABSTRACT (II)目录 .................................................................................................................................................. I II 1 绪论 .. (1)1.1 课题的提出背景 (1)1.2 运料小车的发展概况 (2)1.3 课题的意义及应用 (3)1.4 本课题的主要工作 (3)2 可编程控制器(PLC)的概述 (4)2.1 PLC的定义 (4)2.2 PLC的发展 (4)2.3 PLC的特点 (5)2.4 PLC的基本组成及各部分的作用 (6)2.5 PLC的应用领域 (8)2.6 运料小车控制系统图 (9)2.7 PLC选型 (11)2.7.1 选型分析 (11)2.7.2 系统的安装 (11)2.7.3 输入/输出模块选择 (11)2.7.4 开关量I/O点的节省和模拟量I/O模块的代用 (12)2.7.5 抗干扰措施 (12)2.8 系统资源分配 (13)2.8.1 I/O地址分配 (13)2.8.2 数字量输入部分 (13)2.8.3 数字量输出部分 (13)2.8.4 内部继电器部分 (14)3 基于PLC的运料小车控制系统的硬件设计 (15)3.1 系统工作原理分析 (15)3.1.1 运料小车的运动流程 (15)3.1.2设备控制要求 (15)3.2 系统硬件介绍 (16)3.3 系统硬件设计 (17)3.4 小车运动分析 (19)4 系统软件源程序设计 (22)4.1 小车行程开关 (22)4.2 小车启停辅助继电器 (22)4.3 呼叫按钮 (23)4.4 比较 (25)4.5 向左运动 (25)4.6 向右运动 (26)5 调试结果及工作小结 (27)5.1 控制系统的调试 (27)5.1.1编程软件 (27)5.1.2 程序的构成 (27)5.1.3 程序的下载安装和调试 (29)5.2 本文主要完成的工作及总结 (30)5.3 工作展望 (31)参考文献 (32)致谢 (33)1 绪论1.1 课题的提出背景新中国成立特别是改革开放以来,我国社会主义现代化建设取得了举世瞩目的伟大成就。
PLC课程设计运料小车智能控制
项目设计运料小车智能控制目录摘要............................................. - 2 - 第一部分引言.................................... - 3 - 第二部分小车运送物料的总体设计 ................. - 4 -2.1控制要求:................................. - 4 -2.2系统硬件设备配置........................... - 5 -2.2.1运料小车控制的主回路设计 .............. - 6 -2.2.2、分析控制要求,确定输入、输出设备..... - 7 -2.2.3 分配I/O接口.......................... - 7 -2.2.4I/O外围接线图......................... - 8 -2.2.5 PLC的选型............................ - 8 - 第三部分控制系统设计 .......................... - 9 -3.1控制功能图以及逻辑表达式................... - 9 -3.1.1功能图表达式.......................... - 9 -3.1.2逻辑表达式........................... - 11 -3.1.3根据逻辑表达式画出梯形图 ............. - 11 - 第四部分系统调试及结果分析 ..................... - 12 -4.1 PLC实验操作规程.......................... - 12 -4.2 连接线路 ................................. - 12 -4.3 结果分析 ................................. - 13 -4.4系统调试与解决的问题...................... - 14 -4.4.1调试................................. - 14 -4.4.2检查电路............................. - 14 - 心得体会........................................ - 16 - 参考文献........................................ - 17 -运料小车智能控制摘要运料小车是在现代工厂中普遍存在的,而自动化的智能小车却并不多见,大多数的工厂仍然靠人力手动控制小车装卸物料的,这不仅效率低而且耗费人力物力,降低生产效率,对企业的生产发展起到限制的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一系统工作原理说明
该小车运动控制系统采用PLC为中心控制系统单元。
根据控制要求,为最大限度地满足被控对象的工艺要求,系统需要有手动和自动和自动两种运行方式,需要有信号指示和报警。
按要求初步设定为一个启动按钮SB1、一个停机按钮SB2、行程开关(5个)、手动自动切换旋钮一个、热继电保护开关一个等作为PLC的十个输入点,其中行程开关SQ1、SQ2、SQ3、SQ4、SQ5分别带便A、B、C、D、E五个点。
输入量均为直流量。
其中输出量有1个小车右行控制继电器、1个小车左行控制继电器、1个手动运行模式指示灯、1个自动运行模式指示灯、5个指示ABCDE位置指示灯,1个报警器、一个故障指示灯。
综上,系统需要10个输入点,11个输出点,为最大限度地满足被控对象的工艺要求,选用OMRON C28P的PLC控制器。
OMRON C28P有16点输入,12点输出,00CH为输入通道,0000~0015为输入继电器编号;05CH 为输出通道,0500~0511为输出继电器编号。
其中I/O分配表如下:
PLC的外部接线、系统梯形图、系统主电路图见附录。
系统工作原理:手动和自动模式切换通过旋钮切换,小车在A处时系统才可以开始运行。
结合主电路,继电器KM1控制小车右行,继电器KM2控制小车左行,两继电器内有联锁,任何状态下只会有一个继电器工作。
自动状态下,小车行驶到每一个指定点,相应的PLC时间继电器将开始计时,并将上一个时间继电器关闭,2秒后,该时间继电器控制小车右行,当小车到下一个点依次循环。
小车的右行是通过时间继电器控制的,任何一个时间继电器计时时间到均会使小车右行,由于时间继电器之间有联锁,任何时候只会有一个时间继电器工作。
当到达E点并且2秒定时到后KM2线圈工作主电路器主触点闭合,KM1断电,实现了小车的左行,左行过程中只有当A点行程开关按下时才会是小车停车。
到达A点后计数器减1,并且2秒小车又开始右行直到计数器减到为0才使小车完全停止。
手动状态下,小车的基本右行左行原理和自动状态一样,只是在手动运行状态下,小车的右行左行控制线圈上加有停车按钮。
小车在任何情况下,按下停车按钮后将停止移动。
二操作使用说明
先确定小车运行模式是手动还是自动,自动只需将旋钮S旋到PLC 0006的输入点,手动则旋至PLC 0007输入点,选定完模式后,假设选定为自动模式,按下启动开关,小车即开始向右移动,如果小车刚开始并不在A点,则系统不会运行,直到小车初始位置在A处时系统开始工作。
小车在A先停两秒后自动右移
到B点,再停止两秒,依次一直移动到E点,两秒后小车将发转左行,在左行过程中不要停下直到A点,到A点后继续上述动作移动,当小车来回三趟后将最终停在A。
当选定为手动模式后,小车在自动运行过程中,可以在任意时刻停止。
当小车正常运行在任何一点(A、B、C、D、E),均会有相应指示灯指示该位置。
手动和自动模式也会有相应指示灯显示,当小车自动运行模式下来回三趟完成后、手动状态下按下停机均会有报警提醒操作人员。
当小车处于各点(A、B、C、D、E)之间并且小车没有移动认定为系统故障此时报警并且相应指示灯显示。
系统指令语言程序:
LD 0000
OR 1201
AND 0001
AND 0006
AND NOT CNT01 OUT 1201
LD 0000
AND NOT 0001 OR 1202
AND 0007
AND NOT 1203 AND NOT CNT01 OUT 1202 LD 1201
OR 1202
AND 0001
OR TIM00 AND NOT 0002 TIM 00
#0020
LD TIM00 AND 0002
OR TIM01 AND NOT 0003 TIM 01
#0020
LD TIM01 AND 0003
OR TIM02 AND NOT 0004 TIM 02
#0020
LD TIM02 AND 0004
OR TIM03 AND NOT 0005 TIM 03
#0020
LD TIM03 AND 0005
OR TIM 04 AND NOT 0001 TIM 04
#0020
LD TIM00
OR TIM01
OR TIM02
OR TIM03 AND NOT CNT01 AND NOT 0502 AND NOT 1203 OUT 0501
LD TIM04
AND NOT 1203 AND NOT CNT01 ANT NOT 0501 OUT 0502
LD 0001
LD 1203
AND CNT01 CNT 01
#0003
LD 1202
AND 0008
OUT 1203
LD 0009
OR 1203
OR CNT01
OR 1200
LD 1201
OR 1202
AND LD
OUT 0503
LD 1200
OUT 0511
LD 0006
OUT 0504
LD 0007
OUT 0505
LD NOT 0001 AND NOT 0002 AND NOT 0003 AND NOT 0004 AND NOT 0005 AND NOT 1201 AND NOT 1202 OUT 1200
LD 0001
AND TIM00 OUT 0506
LD 0002 AND TIM01 OUT 0507 LD 0003 AND TIM02 OUT 0508 LD 0004 AND TIM03 OUT 0509 LD 0005 AND TIM04 OUT 0510 END
元件明细表
参考文献
1.建筑电气控制技术王俭建筑工业出版社
2.建筑电气控制技术马小军机械工业出版社
3.建筑电气设备安装调试技术朗禄平中国建筑工业出版社4.各种电器元件产品样本。