多体动力学仿真、creo高级技巧解析
creo多相流体力学
creo多相流体力学Creo多相流体力学是一种用于模拟多相流动行为的计算方法。
它结合了计算流体力学和多相流动理论,可以用于研究液体、气体和固体颗粒等不同相态的流动现象。
在Creo多相流体力学中,通过数值模拟方法,可以对多种物质在不同条件下的流动行为进行预测和分析。
这种方法基于质量守恒、动量守恒和能量守恒等基本原理,通过数值求解相关方程组来模拟实际的多相流动现象。
Creo多相流体力学可以应用于各个领域,如化工工艺、石油工程、环境工程等。
在化工工艺中,它可以用于模拟反应器内的气液两相反应过程,预测反应器内物质传递和反应效果。
在石油工程中,它可以用于模拟油井中的油水两相流动行为,预测油井产能和优化开采方案。
在环境工程中,它可以用于模拟水污染物在水体中的传输和扩散过程,评估污染物对环境的影响。
Creo多相流体力学的模拟过程包括几个关键步骤。
首先,需要建立几何模型,包括流动区域的几何形状和边界条件。
然后,需要选择适当的数值方法和网格划分方法,将流动区域离散化为有限数量的小单元。
接下来,需要建立数学模型,包括质量守恒、动量守恒和能量守恒等方程。
最后,通过数值求解方法,对方程组进行求解,并得到流动过程中各个参数的分布情况。
Creo多相流体力学在工程实践中具有重要的应用价值。
它可以帮助工程师们更好地理解和预测多相流动现象,优化工艺设计和操作参数,并提高生产效率和产品质量。
同时,它也可以用于研究新材料、新工艺和新设备等方面的问题,推动科学技术的发展。
总之,Creo多相流体力学是一种强大而有效的计算方法,在多相流动领域具有广泛应用前景。
通过模拟和分析多相流动行为,可以为工程实践提供重要参考,并推动相关领域的科学研究进展。
CREO六轴机械手的仿真运动图文教程

六自由度机械手因为运动轨迹复杂,坐标法显然不合适。
所以本教程用快照法制作。
1.1首先是装配零件,新建组件P—HAND。
ASM,插入m—16ib_base_any_1_1.prt,连接方式是默认,如下图:1.2装配BASEPLATE_1,板上四个孔与机械手基座m—16ib_base_any_1_1.prt的对齐,并且基座m—16ib_base_any_1_1.prt底部与基板BASEPLATE_1表面配合,(这两个零件哪个先装配都可以,到动画制作时都作为基座处理)如下图:1.3装配零件m—16ib_axis1_any_1_1。
prt,以销的方式连接,注意销连接的方向,如图:1。
4旋转轴对齐,当前位置输入0,勾选启用重新生成值。
如下图:1.5销连接方式装配m—16ib_axis2_any_1_1.prt,注意销连接的方向,如下图:平移设置中,约束类型为距离,分别选择下面两个面,偏移距离15,如下图:旋转轴选择如下图的两个基准面,当前位置输入0,如下图:当前位置输入-40,零件往如下图所示的方向偏40度(这个要根据销连接的运动方向,如没有如下图所示的方向偏就改变销连接方向),如下图:点击设置零位置,勾选启用重新生成值,确定完成装配,如下图:1。
6装配零件m-16ib_axis3_any_1_1。
prt,还是销连接,轴对齐,平移选择下图两个面,约束类型为重合,注意销连接方向,如下图:旋转轴选择下面两个基准面,如下图:当前位置输入90,零件往如下图所示方向翻转90度(翻转的方向取决于销的连接方向),如下图:点击设置零位置,勾选重新生成值,如下图:装配零件m—16ib_axis4_any_1_1。
prt,销连接,如下图:旋转轴如下图:装配零件m-16ib_axis5-6_any_1_1。
prt,销连接,注意连接方向,如下图:旋转轴设置如下图:装配零件FIX_1,销连接,注意连接方向,如下图:旋转轴的设置和前面的差不多,如下图:物料装配,在这里不用约束,用户定义,放置设置成自动,如下图:显示基准面,点击拖动元件,弹出对话框,点击约束—对齐两个图元,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择下图两个曲面,如下图:点击对齐两个图元,分别选择下图箭头的两个基准面,在下面的偏移,offset处输入—700,如下图:点击拍下当前配置的快照,如下图:再点击拍下当前配置的快照,点击约束,点击对齐两个图元,点击显示基准面,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择以下曲面,如下图:对齐结果,如下图:隐藏基准面,点击主体—主体锁定约束,如下图:分别选择物料PP_1和FIX_1,然后点击右下角的小对话框的确定,生成一个主体锁定约束,如下图:点击运动轴约束,选择下图箭头中的销连接,如下图:下面的偏移值就是当前销连接的位置,如下图:用同样的办法添加下图所示的三个连接运动轴约束,如下图: 添加后,效果如下图:添加完毕后,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置,如下图:点击拍下当前配置的快照,点击约束,删除两个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击连接3、4、8把偏移值分别改成0,观察机械手与物料变化情况,如下图:添加完毕后,参照前面一样,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置;点击拍下当前配置的快照,点击约束,删除一个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击运动轴约束,添加下图所示的连接,如下图:在新添加的连接约束下面的偏移输入90,如下图:整个机械手旋转了90度。
CREO 机构的运动仿真与分析

仿真过程详解
导入模型:将CREO模型导入到仿真软 件中
分析结果:分析仿真结果如位移、速 度、加速度等
设置参数:设置仿真参数如时间、速 度、加速度等
优化设计:根据仿真结果对模型进行 优化设计
优化方案与实施
优化目标:提高机构运动效率降低能耗 优化方案:采用CREO机构的运动仿真与分析技术 实施步骤:建立模型、仿真分析、优化设计、验证测试 实施效果:提高机构运动效率降低能耗提高产品性能
06
结论与展望
总结CREO机构的优势与不足
优势:强大的建模功能支持多种格式的导入和导出 优势:高效的仿真分析功能能够快速准确地模拟机构运动 不足:对复杂机构的处理能力有限需要更多的优化和改进 不足:用户界面不够友好需要更多的用户反馈和改进
运行仿真
导入模型:将CREO模型导入到仿 真软件中
定义材料属性:为模型定义合适的 材料属性
添加约束:为模型添加适当的约束 条件
添加载荷:为模型添加适当的载荷 条件
运行仿真:运行仿真观察模型的运 动情况
分析结果:分析仿真结果得出结论
04
分析方法与工具
运动学分析
运动学方程: 描述物体运动
的数学模型
添加标题
添加标题
动力学分析应用:优化设计、故 障诊断、性能评估等
疲劳分析
疲劳分析的目的: 预测产品在使用 过程中的疲劳寿 命
疲劳分析的方法: 有限元分析 (FE)、实验测 试等
疲劳分析的工具 :CREO Simulte 、NSYS等
疲劳分析的步骤 :建立模型、施 加载荷、求解、 分析结果等
多体动力学仿真介绍
多体动力学仿真介绍
多体动力学仿真是一种基于计算机技术的模拟方法,用于分析和预测机械系统中的运动和力学行为。
它广泛应用于机械工程、航空航天、汽车、船舶、兵器等领域,成为产品设计和性能评估的重要手段。
多体动力学仿真的基本原理是建立在牛顿第二定律和刚体动力学理论的基础上的。
它通过建立系统的数学模型,对系统中的各个刚体进行运动学和动力学分析,得出它们的运动轨迹和受力情况。
这种方法可以模拟复杂的机械系统在不同条件下的动态性能,帮助工程师更好地理解系统的运动特性和力学行为,从而进行优化设计。
多体动力学仿真的主要步骤包括建立模型、定义约束和载荷、进行仿真计算和结果分析。
在模型建立过程中,需要将实际系统抽象化为若干个刚体,并定义它们之间的连接关系和相互作用。
约束和载荷则用于描述刚体之间的相对运动和外部作用力。
通过设定适当的初始条件和边界条件,可以进行仿真计算,得出每个刚体的位置、速度、加速度等运动参数以及作用力、反作用力等力学参数。
最后,通过对结果的数值分析和后处理,可以得出系统的性能指标和优化方向。
多体动力学仿真的优点在于其能够模拟复杂系统的动态行为,可以预测系统在不同工况下的性能表现,帮助工程师提前发现和解决潜在的设计问题。
同时,这种方法还可以大大缩短产品的研发周期和降低试验成本,提高产品的可靠性和安全性。
MSC Adams多体动力学仿真基础与实例解析
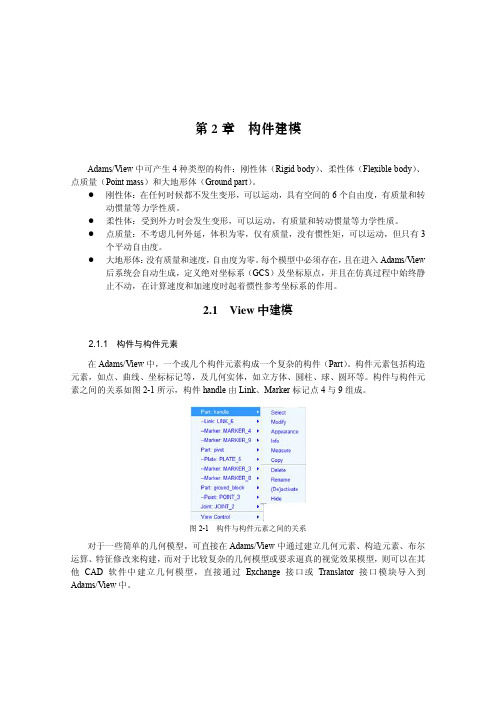
图 23 状态提示信息
(1)创建设计点。以设计点为基准定义空间位置来创建构件,是 Adams/View 中的常用 方法。可以通过对设计点的参数化处理,实现模型的参数化建模,在试验设计、研究和优化分 析中非常有用。
单击 Construction 中的 按钮,在模型树上方出现设计点的属性栏,如图 24 所示。
图 212 MSC Nastran Translate 设置
2.1.5 添加特征 创建了几何实体后,用户可以对其进行修饰处理,包括倒直角(Chamfer)、倒圆角(Fillet)、 钻孔(Hole)、凸圆(Boss)、抽壳(Hollow)等特征,如图 213 和表 21 所示。
图标
图 213 创建特征工具栏
构件建模
第2章
2.1.2 创建构造元素
构造元素包括设计点、标记点、圆、圆弧、直线、质量点、多段线和样条曲线。单击主工 具栏 Bodies>Construction,构造元素工具栏如图 22 所示。
图 22 构造元素工具栏
这些构造元素建模工具的使用方法大同小异,单击不同的按钮,工具界面状态栏会有相应 的提示信息,如图 23 所示,可根据状态栏的提示信息进行操作,下面介绍部分要素的使用方法。
2.创建拉伸体(Extrusion) 对于一些复杂的不规则的几何形体,可以使用此工具来创建。单击 Solids 工具栏中的 按钮,在模型树上方出现长方体属性栏,如图 29 所示。
23
MSC Adams 多体动力学仿真基础与实例解析
图 29 创建拉伸体对话框
在下拉列表框中有 New Part、Add to Part、On Ground 选项,分别表示所创建的拉伸体是 新创建、添加到已有的构件上或者属于地面。在 Profile 栏右侧可选择 Points、Curve 选项,分 别表示拉伸体截面可由点或曲线生成。
Creo功能详解参考模板

CREO2.0 新增功能一、命令搜索使用功能区管理命令,你可能会觉得有些担忧无法找到你最喜欢的特点和命令。
点击命令将打开一个搜索域,然后您可以键入命令关键字,如图1。
这是一个动态列表不断更新你的命令。
当你看到你需要的命令只需点击它,证明此功能非常方便。
二、实体预览当一个新的特征创建好后,我们可以看到实体预览而不是简单黄色加亮预览。
新创建特征的曲面以漂亮的橘黄色显示,而参照则以绿色显示,如图2,这样我们很容易辨别那个特征被激活以及它选择的参照。
三、模型带边着色显示现在您可要让模型带带边着色显示,这样相切边会以黑色的线条显示,以至于我们可要很容易辨别每个曲面的边界,如图当我们光标悬放在某个曲面或特征上面的时候,他们会以淡绿色加亮显示,如图四、带锥度拉伸拉伸特征有了一个新的选项即“添加锥度”,如图5,这个命令和拔模有点相似,该功能有助于提高设计师效率和减少模型特征数量。
五、新的编辑功能当某个特征被编辑的时候,我们会发现很多有趣的事:(1)被编辑的特征以橙色加亮(2)特征尺寸或拖动手柄被显示出来(3)基于草绘的特征,其草绘线也会被显示出来(4)拖动手柄可以改变特征的形状和位置尺寸,并且得到实时预览,如图,并且可以同时编辑多个特征,因为模型是动态再生完全可以胜任,而且是实时预览。
六、螺旋扫描特征可实时预览螺旋扫描特征也增加了操控面板,并且可以实时预览。
同样可以利用动态编辑功能进行修改,如图7。
七、定截面扫描和变截面扫描合并之前版本的恒定截面扫描和变截面扫描已经合成为一个命令,它将提供非常强大的功能,可以处理两者的建模情况,八、草绘过程中摄取参照我们在草绘截面的时候通常会发现,已经起笔画线发现参照没有选择,只能放弃画线重新摄取参照然后重新画线。
Creo中增了在草绘中摄取参照的新功能,即画线时按住键盘 Ctrl和 Alt两个键仍然可以增加参照,如图九、新的3D拖动拖动和旋转几何,拉动三个坐标的箭头来移动几何体,拖动圆形的环可以使几何绕原点旋转,如图一删除旧版本和垃圾文件1.1 Proe删除旧版及垃圾文件.exe1.2.1 右上角倒三角图标1.2.2选定“所有命令”,向下浏览找到“打开系统窗口”命令,点“添加”,然后“确定”即可1.2.3点新建按钮旁边的球形图标“打开系统窗口”;1.2.4熟悉的命令提示符界面出现了二新增功能之动态剖切2.1 选定视图→截面→平面→选定剖切面2.2 选定红色箭头后按箭头方向前后拉动鼠标即可动态剖切。
Creo原创教程(九),接触碰撞运动仿真解析,引申模具顶针顶出件运动要点
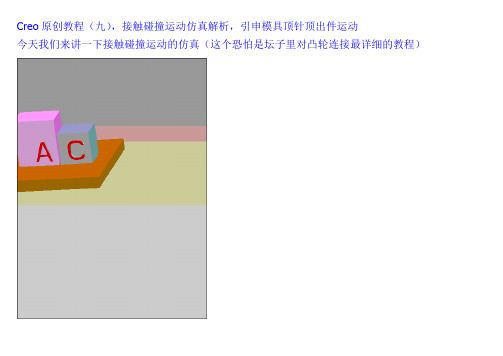
Creo原创教程(九),接触碰撞运动仿真解析,引申模具顶针顶出件运动今天我们来讲一下接触碰撞运动的仿真(这个恐怕是坛子里对凸轮连接最详细的教程)之前很多人pm还有在qq群问我说做模具顶出件运动怎么做,我直接回答用凸轮连接对设置连接,启用升离,再启用重力就可以了,这样还是有很多人不太明白,其这个东西听着很简单,里面还有很多的窍门和方法再加上一些经验,只要你看过了本教程,再加上平时多联系,相信接触碰撞这里,一般的问题都可以解决了,我们来看一下,以前的2001版本以前方针分析里面比较简单,简单的方针都可以做到,但是到了野火版本以后,功能提升了好多,在野火中有三种特殊的连接,可以设置特殊连接后进行各种分析,这三种连接分别为凸轮副连接,槽连接,齿轮运动副连接,今天讲的是接触碰撞的仿真,主要用到的是凸轮的链接,所以只讲凸轮,齿轮和槽连接以后再讲。
顶针顶出件运动仿真,其实就是在顶针头部和接触的件之间建立一个凸轮连接,有人会问,顶针和件是两个平面与平面相碰,怎么建立凸轮,在凸轮连接时,里面有一些技巧,尤其是建立曲面和选择曲面时,技巧性比较强,相信很多高手有些时候都那凸轮连接因没有选择好曲面或是没有建立好曲面,导致仿真多次失败。
我们先看一下凸轮的链接设置1 “凸轮1”选项卡:定义第一个凸轮(1)“曲面/曲线”:单击箭头选取曲线或曲面定义凸轮工作面,在选取曲面时若钩选自动选取复选框则系统自动选取与所选曲面相邻的任何曲面,凸轮与另一凸轮相互作用的一侧由凸轮的法线方向指示。
如果选取开放的曲线或曲面,会出现一个洋红色的箭头,从相互作用的侧开始延伸,指示凸轮的法向。
选取的曲线或边是直的,“机械设计模块”会提示选取同一主体上的点、顶点、平面实体表面或基准平面以定义凸轮的工作面。
所选的点不能在所选的线上。
工作面中会出现一个洋红色箭头,指凸轮法向。
3“属性选项卡”(1)升离:启用升离允许凸轮从动机构连接在拖动操作或分析运行期间分离e在0-1之间(2)摩擦:Us静摩擦系数Uk 动摩擦系数静摩擦系数应大于动摩擦系数举例:1.建立连个立方体和一个平板2.建立一个组件,平板默认装配,立方体A平面约束,front面和平板的front面,A的下表面和板的上表面,再装配C,C的front面和平板的front面设置平面约束,然后用手鼠标拖动C,让C的下表面大体能够贴在平板的上表面即可,让A和C有点距离。
ProeCreo多动作仿真

ProeCreo多动作仿真本教程主要介绍多动作仿真,模型比较简陋,重点在于活动零件的装配连接、动作时序分析和伺服电机的设置。
动作过程:气缸动作-气缸复位-转盘转动45度-气缸动作-气缸复位-转盘转动45度。
1.新建组件asm-all,将文件夹中的baseplate以缺省方式装配,将电机57HS22-a以适合的刚性连接装配到baseplate中间位置,如下图:2.将wheel以销连接方式装配到电机轴,旋转轴分别选择wheel 上的基准面与baseplate上的能与其重合的基准面,当前位置输入0,勾选启用再生值,如下图:3.用合适的刚性连接把plate-1装配到baseplate侧边的两个孔,如下图:4.用合适刚性连接把气缸FDA20-50装配到plate-1顶部的孔,如下图:零件已全部装配完成。
5.下面是重点,进行动作时序分析。
为了分析动作时序更明确,用EXCEL创建一个表格,如下图:如上图,这就是动作分析的全过程;第一、二行是转盘与气缸的动作位置与行程的变化,第三行为时间轴。
如要调节速度,可以适当更改每个时间间隔。
6.根据上面的EXCEL表格,创建两个TXT文件(这里是有规律的,请细心对比表格与两个TXT文件),并保存到目前工作目录,如下图:6.切换到机构模块。
7.点击伺服电机,弹出对话框,选择转盘销连接运动轴作为运动轴,如下图:点击对话框中的轮廓,模选择表,如下图:点击文件下面的图标,弹出对话框,类型选择所有文件,找到上面创建的TXT文件中的转盘,点击确定,点击伺服电机定义对话框中的确定,如下图:8.用同样的方法,定义气缸的伺服电机。
9.把模型移动到适合观察的角度,点击机构分析,把对话框移到一边,在结束时间输入63,如下图:点击运行,完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 ste四p(步tim:e,77,-01,80.S5,腕60部d)+转s动tep1(5ti0m度e,8,.5正,0,反10转,-1。20d)
W10
动作解析2(15S 320Step):
第Mo一tio步n1:0-2s底盘旋转450°,即转一圈半,然后停 止ste动p(t作ime;,01,00,2-,41550ds)反+s向tep转(ti动me4,1500,0°,1;5,-450d)
直线运动(轨迹) 原地转动(轨迹)
A3:直接导入模型(乱动);
A1.bin
A2.bin
A3.bin
实例: A4-C:四轮+机械臂; A4-B:四轮+机械臂(联动); A6:四轮+机械臂(一体) (5S 100Steps)
A4-C.bin
15S 300Steps
A4-B.bin
10S 200Steps
机械系统多体动力学仿真
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件,是由美国MDI公司(Mechanical Dynamics Inc.)(现已经被美国MSC公司收购)开发的机械系统动 力学分析软件,是世界上应用最广泛且最具有权威性的 机械系统动力学分析软件。工程师、设计人员利用 ADAMS软件能够建立和测试虚拟样机,实现在计算机 上仿真分析复杂机械系统的运动学和动力学性能。
Pro/E建模及装配; 利用Mech/Pro生成刚体并添加运动副;
定义刚体、添加标记; 添加运动副 ; 向Adams转换模型 ; 利用Adams/View进行虚拟样机的仿真以及结果的后处理 ; 仿真模型检验和修正。
单向 数据流
Pro/E环境 Adams环境
实例:舞蹈机器人运动仿真 根据装配体模型分析界定刚体个数; 根据需要添加标记点; 分析设定刚体之间的运动副关系。
W-00
动作解析1(10s 240Step):
第 Mo一tio步n1:0-2s底盘旋转450°,即转一圈半, 然 ste后p(停tim止e,动0,0作,2,;450d)
Motion4
第 ste二p(t步im:e,22,0-,43,s8腰0)+部st推ep杆(tim做e,俯3,0仰,4,动-60作) , 行 程 8M0omtiomn2; 第 ste三p(步tim:e,44,-07,5S.大5,1臂60转d)动+s1te5p0(t°i,me正,5反.5,转0,7;,-60d)
A6.bin
5S 100Steps
补充内容
静力学分析:结构在承受稳定载荷作用下的受力 特性分析(应力、应变、位移等);
作用:找出应力集中、变形最大的地方,也就是 薄弱或者危险部位。
Pro/E WF3.0
Mech/Pro2005
Adams2005/2007
Mech/Pro 是 以 插 件 的 形 式 , 挂 接 在 Pro/E 的 菜 单 管理器上,如右图所示。
装配体环境 简单、快捷、精确等特点。
注 意 : 与 Ansys12.0 同 时 安 装 使用时,会出现冲突。
实例
为核心模块、 功能扩展模块、专业模块、接口模块、工具箱5类, 其中核心模块为ADAMS / View、ADAMS / Solve r、ADAMS/Postprocessor。
ADAMS 采用Parasolid作为实体建模的内核,并 且支持布尔运算。
版本:2005、2007、2012(32/64位)
step(time,4,0,5.5,160d)+step(time,5.5,0,7,-60d)+step(time,10,0,12.5,
执160行d)上+st次ep动(tim作e,;12.5,0,15,-60d) 第Mo四tio步n3:7-10S腕部转动150度,正反转;10-15s重 复ste执p(t行ime上,7次,0,8动.5,作60d。)+step(time,8.5,0,10,-120d)+step(time,10,0,13,
Motion4
第ste二p(ti步me:,2,20,-34,8s0腰)+s部tep推(tim杆e做,3,0俯,4,仰-60动)+s作tep,(ti行me程,102,00,1m2.5m,8;0)+st 1ep0(t-i1m5e,s1重2.5复,0,执15,行-60上) 次动作; 第Mo三tio步n2:4-7S大臂转动100°,正反转;10-15s重复
难点在于模型构建过程要推算其质心坐标值。
3d_flat.rdf
路面谱及轮胎文件的建立 路面谱:
路面谱的位置处于轮胎的下方;
路面谱向上的方向指向轮胎所处的一侧;
路面谱的大小根据仿真的需要确定。 路面谱节点(node)数量、坐标;
路面谱单元(elements)节点分布、摩擦系数;
C:\MSC.Software\MSC.ADAMS\2005r2\solver\atire\roads.tbl
广义坐标系(地面坐标系) 局部坐标系 标架坐标系 位置:构件质心坐标(局部相对广义坐标系) 方位:构件质心的方向余弦矩阵 基于位置参数和方位矩阵参数求动力学方程。
Mechanism/Pro(Mech/Pro)是MSC公司针对 PTC系列软件与ADAMS软件进行联合仿真而设计的 一款专用程序接口。
60d)+step(time,13,0,15,-120d)
W11
结果分析:
旋转电机转矩特性曲线图
推杆推力特性曲线图
W11
考虑XB50结构复杂、零部件数量繁多,存在质 量分布不均,转动惯量无法确定等问题,故难以采 用联合仿真的方法。
采用Adams独立仿真的方法,将XB50模型简化, 忽略部分零部件,对相关联零部件进行布尔加运算, 并将其实际质量和转动惯量添加到虚拟样机模型中。
履带模型通用模块ATV不开放
3d_flat.rdf
轮胎文件: Adams提供了5中轮胎模型,一般选用UA模型。
C:\MSC.Software\MSC.ADAMS\2005r2\solver\atire\tires.tbl
UAT_XB5.tir
实例: A1:两轮简易模型; A2:四轮简易模型(10S 200Steps);