参数自适应控制在直流无刷电机驱动器中的应用
模糊自适应PID控制器在无刷直流电机控制系统中的应用研究
乱 £ =志 e + 忌√ () t 志 d () 出 (): () 0 d + d e f/ = I8
令 五 p一 是 + p是 ; 一 是 + ;d一 是。 足 d + d 则 可 将 ( )式 写 成 : , 4
r t
() 4
“f ()一 (加+△ Pf + ( +△ J 0P d 4 (d+△ d d() d 志 志 )() 志 0 忌) ()t- 志o 志 )et/ f I
作 者 简 介 : 文 俊 ( 9 7) 男 , 徽 长 丰 人 , 士 研究 生 . 戴 1 8 一, 安 硕
通 讯 作 者 : 有 铸 ( 9 2) 男 , 徽 庐 江 人 , 授 , 导 . 凌 16 - , 安 教 硕
第 4 期
戴 文 俊 , : 糊 自适 应 P D 控制 器 在 无刷 直 流 电机 控 制 系统 中 的应 用 研 究 等 模 I
和△ d
的 隶 属 度 函 数
本 二维 模糊 控制 器 的模糊 逻辑 推理 采用 Ma a i 则 , md n 法 去模 糊 化 采 用重 心 法 , 可求 出修 正 后 的模 糊
基 金 项 目 : 徽 省 自然 科 学 基 金 资 助 项 目 (1 4 6 6 1 ) 安 徽 省 高 校 自然 科 学 基 金 资 助 项 目(jO l 2 9 ; 湖 市 科 技 安 1 0 0 0 m1 5 ; k2l b 1 )芜
计 划 基 金 资 助 项 目[ 科 计 字 (0 1 4 文 ] 芜 2 1 )7号
文献标识码 : A 中 图 分 类 号 : M3 1 T 5
1 无 刷 直 流 电机 ( L C ) B D M 的数 学模 型
] 曼] LL c 一 ] MMM+ 毒 『 ] i + { ]] L
参数自适应控制在直流无刷电机驱动器中的应用
收稿日期:20011220 驱动控制 参数自适应控制在直流无刷电机驱动器中的应用江晓光1,曲家骐2(1.上海交通大学,上海200030;2.信息产业部电子第21研究所,上海200233)Application of P arameter Self -adjust Control in B rushless DC Motor DriverJIANG Xiao -guang 1,QU Jia -qi2(1.Shanghai Jiaotong University ,Shanghai 200030,China ;2.E lec.N o.21Research Institute under the Ministry of In formation Industry ,Shanghai 200233,China ) 摘 要:简要探讨基于数字信号处理芯片的参数自适应控制在直流无刷电机驱动控制器中的应用。
关键词:直流无刷电动机;数字信号处理器;参数自适应控制中图分类号:TM33 文献标识码:A 文章编号:1004-7018(2002)02-0031-02Abstract :This paper introduces the application of parameter self -adjust control in designing of brushless DC m otor driver based on DSP.K eyw ords :brushless DC m otor ;DSP ;parameter self -adjust control1引 言直流无刷电动机是随着电力电子技术和高性能永磁材料而迅速发展并得到广泛应用的新机种。
众所周知,直流无刷电动机具有交流电动机结构简单,运行可靠,维护方便,寿命长的特点,又具有普通直流电动机良好的机械特性和调速性。
目前,在许多要求高的电力驱动系统中得到越来越广泛的应用。
智能控制在无刷直流电机控制中的应用研究

后 ,对无刷 直流电机智能控制 的发展趋势做 了展 望。 关键 词 :无 刷直流电机 ;智能控制 ;综述 中图分 类号 :T M 3 6+1 文献标 志码 :A 文章编号 :1 0 0 1 . 6 8 4 8 ( 2 0 1 3 ) 1 0 — 0 0 8 7 . 0 4
Re s e a r c h o n App l i c a t i o n o f I nt e l l i g e n t Co n t r o l t o BLDCM Co nt r o l S y s t e m
g r a y c o n t r o l ,s l i d i n g mo d e c o n t r o l ,n e ur a l n e t wo r k c o n t r o l ,a r t i ic f i a l i mmun e c o n t r o l a n d o t h e r i n t e l l i g e n t c o n t r o l me t h o d s we r e i n t r o d u c e d. Th e a d v a n t a g e s a n d d i s a d v a nt a g e s o f v a  ̄o u s i n t e l l i g e n t c o n t r o l me t ho d s
模糊自适应PID控制器在无刷直流电机控制系统中的应用
模糊自适应PID控制器在无刷直流电机控制系统中的应用孙佃升1白连平2(1.滨州学院自动化系,滨州,256601)(2.北京机械工业学院自动化系北京 100085)摘要:无刷直流电机是一种多变量、非线性的控制系统,采用经典的PID控制难以达到满意的控制效果。
本文将模糊自适应PID控制器应用于无刷直流电机的控制中,运用模糊控制原理对PID参数进行在线调整。
实验结果表明,较之传统的PID控制,采用模糊自适应PID控制的无刷直流电机控制系统具有更好的动态和静态性能,达到了较好的控制效果。
关键词:无刷直流电机;模糊PID;自适应控制;参数自整定The Application of Fuzzy Adaptive PID Controllerfor Control System of BLDCMSUN Dian-sheng 1BAI Lian-ping 2(1.Department of Automatization, Binzhou College, Binzhou,256600,China)(2.Department of Automatization, Beijing Information Science&Technology University,Beijing,100085,China)ABSTRACT: As brushless DC motor (BLDCM) is a multi-variable and non-linear system, using conventional PID control can not obtaion satisfied control effect. This paper introduce the application of fuzzy adaptive PID controller for control system of BLDCM and parameters self-tuning online by employing Fuzzy control principle. The experiments illustrate that excellent static and dynamic performance compared with the conventional PID control.KEY WORDS: Brushless DC Motor(BLDCM); Fuzzy PLD; adaptive control; parameter self-tuning1 引言无刷直流电机既有优良的调速性能,又克服了有刷直流电机机械换向带来的诸多问题,在各个领域获得了广泛的应用。
自适应控制在电机控制中的应用

自适应控制在电机控制中的应用摘要:永磁同步电动机由于具有高功率密度、高效率、强大的过载能力和良好的控制性能的优点,在中小容量的速度控制系统和高精度的速度控制事件中迅速发展。
但是,永磁同步电动机的磁场具有独特的交叉耦合和交叉饱和现象,控制系统是一个强大的非线性时变多元系统,可以实现高精度的速度调节,因此将对其控制策略进行深入研究。
在作者多年的工作经验的基础上,本文介绍了如何将BP神经网络应用于运动控制。
关键词:自适应控制;电机控制;应用一、引言永磁同步电动机电动机结构简单,维修方便,可以代替直流电动机的运行方式。
如果电动机速度低于特定阈值,则在摩擦的影响下操作趋于脉动,并且旋转磁场的速度与同步速度之间存在较大差异。
因此,速度调制性能相对较差。
感应电动机开发后的工业生产不仅必须适应各种应用,而且还需要可接受的成本。
因此,需要对速度控制进行研究。
由于永磁同步电动机在运行过程中表现出复杂的时变特性,因此许多控制策略已应用于控制感应电动机以获得更好的控制性能。
这些策略在某种程度上提高了电动机的运行效率,但是随着应用环境变得越来越复杂,控制策略带来了更多的计算。
为了减少计算量,需要选择一种更好的控制方法来控制该可执行程序。
因此,提出了一种用于电动机控制的自适应控制方法BP神经网络。
根据调速器的性能要求,提高了调速适应性,使电动机具有更好的动态特性。
二.神经网络概述自上世纪80年代以来,由于神经网络可以满足现代控制系统(例如不依赖于它们的控制系统)的要求,因此人工神经网络(ANN)在控制领域的研究和应用中取得了突破。
在受控对象上,数学模型和传递函数可以用任意复杂的非线性函数近似,并具有强大的自学习和自适应功能。
人工神经网络与控制策略的结合,为开发复杂的非线性,不确定性和不确定性系统的控制问题开辟了一条新途径,该方法通过开发自动化神经网络控制领域的前沿领域之一。
智能控制成为新的观点。
在解决控制问题方面,神经网络具有以下优点:(1)具有相对简单结构的神经网络可以完全完全近似复杂的非线性函数。
基于机器学习的自适应控制在机电系统中的应用

基于机器学习的自适应控制在机电系统中的应用自适应控制是一种能够根据系统的反馈信息来动态调整控制策略的控制方法。
机电系统对于自适应控制方法的应用具有重要的意义,因为它们通常包含复杂的非线性动力学模型和不确定性。
机器学习是一种能够从数据中自动学习并改进性能的技术。
在机电系统中,机器学习方法可以用于建立模型、分析数据和预测系统行为。
结合机器学习和自适应控制方法,可以实现更加精确和稳定的控制。
首先,自适应控制在机电系统中的应用可以通过机器学习方法进行模型辨识。
传统的控制方法通常需要准确的系统模型,但是在复杂系统中获取精确的模型往往非常困难。
借助机器学习的方法,可以通过对实际系统的输入与输出数据进行学习,建立近似的系统模型。
这些模型可以用于控制器设计和系统分析,提高控制系统的鲁棒性和性能。
其次,机器学习能够实现自适应控制器的在线调整。
传统的自适应控制方法通常基于固定的控制策略,无法动态地适应系统的变化。
而机器学习方法可以根据系统的实时反馈信息,通过学习和更新控制器的参数来实现自适应调整。
这样可以使控制器更好地适应系统的变化,提高控制性能和稳定性。
此外,机器学习方法可以通过分析大量的数据来优化控制器的性能。
在机电系统中,可以通过监测和记录大量的系统数据,包括传感器数据和控制指令数据。
这些数据可以用于训练机器学习模型,从而提取系统的特征和规律。
通过分析这些数据,可以优化控制器的参数和策略,提高系统的性能和效率。
总结起来,基于机器学习的自适应控制在机电系统中具有巨大的应用潜力。
它可以通过模型辨识、在线调整和数据分析来提高控制系统的性能和鲁棒性。
未来,随着机器学习方法的不断发展和进步,我们可以预见基于机器学习的自适应控制在机电系统中的应用将会得到更加广泛和深入的应用。
模糊自适应PID控制在无刷直流电动机矢量控制中的应用
了无刷直流电动机推广前景。 无刷直流电动机的相关研究 国内外正在广泛地开 展起来 ,相应地数学模型 已经被成功地建立出来。无
子磁链定向方法 ,提出一种 电流环使用传统的 PD控 I 制 ,速度环使用模糊 自适应 PD控制方法 , I 设计出了
无刷直流电机的模糊 自适应 P I D控制系统。从而能够
c n o S lo u e . n e h ei nn ft u z d p v I c nr l v c sc rid ot l r Wa i r d c d a dt n t d s igo h f y a a t eP D o to iewa are n h e g e z i e d o . df l ec s t d sc rido . n en meia i lt nWa are u dte t u An mal t a es y wa are u a dt u r I mu ai S c rido a yh u t h c s o tn h
( a g a gP lt h i C l g , u n g n 3 0 2 C ia Hun g n o e nc ol e H a g a g4 8 0 , hn ) yc e
Ab t a t I r e a etev co o to o eBr s ls sr c: n o d rt h v e t r nr l r u he sDC oo fe t ey a dtef z y o h c f t h M tre c i l, n h u z v
tsigrs l h we a i to a o da a t ea dlg l bly e t eut s o dt th s h dh dag o d pi ihr i i t. n s h t me v n l ea i K e r s P D o to; m s ls ywo d : I c n lb he sDC oo ; e tr o to r M tr v co nr l c
无刷直流电机自适应模糊直接转矩控制研究
o f S c i e n c e a n d T e c h n o l o g y , K u n m i n g Y u n n a n 6 5 0 5 0 0 , C h i n a )
A b s t r a c t: Wi t h r e s p e c t t o t h e b i g t o r q u e r i p p l e o f b r u s h l e s s D C m o t o r ( B L D C M) a n d p o o r a d j u s t a b i l i t y o f t r a d i t i o n a l P I s p e e d l o o p , a n a d a p t i v e
模糊自适应PI控制在直流无刷电动机调速系统的应用
模糊自适应PI控制在直流无刷电动机调速系统的应用胡发焕;唐军;邱小童【摘要】在分析直流无刷电动机的工作原理和数学模型的基础上,提出基于速度环和电流环的双环控制模式,在速度环中采用模糊自适应PI控制方式,在电流环中采用传统的PID控制方式.实验表明,与传统PID控制方式相比,采用模糊自适应PI控制,在负载或参数发生变化时,具有转速波动更小、鲁棒性更强的特点,是一种更优越的控制方法.%Based on analyzing the principle and mathematical model of the brushless DC motor, the paper proposes a control model on the basis of speed loop and current loop, self-adaption fuzzy PI control model is a-dopted in the speed loop, and traditional PID control model is used in the current loop. It is showed that when the load or parameters vary, comparing to traditional PID control model, the self-adaption fuzzy PI control model gets less fluctuation and better robustness.【期刊名称】《制造技术与机床》【年(卷),期】2012(000)006【总页数】4页(P188-191)【关键词】模糊自适应控制;直流无刷电动机;PI控制器;智能控制【作者】胡发焕;唐军;邱小童【作者单位】江西理工大学机电工程学院,江西赣州 341000;江西理工大学机电工程学院,江西赣州 341000;江西理工大学应用科学学院,江西赣州 341000【正文语种】中文【中图分类】TM33目前直流无刷电动机(BLDCM)广泛应用于航空航天、军事、工业、医疗机械等诸多领域。
基于自适应算法的无刷直流电机控制器的研究与设计的开题报告
基于自适应算法的无刷直流电机控制器的研究与设计的开题报告一、选题背景及意义:无刷直流电机(BLDC)具有高效、高速、快速启停等优点,在航空航天、军事、汽车、家电等领域有着广泛应用。
在实际应用过程中,BLDC的控制器通常采用PID控制算法,但是存在在抗干扰性能、响应速度、系统稳定性等方面仍有提升的问题。
因此,设计一种基于自适应算法的无刷直流电机控制器,可实现更高效、稳定、精确的控制,具有较大的实用价值。
二、研究内容:本项目旨在设计一种基于自适应算法的无刷直流电机控制器,探索自适应算法在BLDC控制中的应用。
具体研究内容包括:1. 建立无刷直流电机数学模型,包括电机本体模型、电机传动系统模型等;2. 深入探究自适应算法原理,选择合适的自适应算法,并将其应用到无刷直流电机控制器中;3. 根据自适应算法的特点,设计适合该算法的控制器结构,并建立电路原理图;4. 进行电路仿真,对设计的控制器进行性能测试,比较其与传统PID控制器的不同之处;5. 对实验样机进行验证,测试其控制性能和实用效果。
三、研究方法:本研究采用理论分析、数学建模、电路设计、电路仿真、实验验证等方法,分别进行系统分析、建模和仿真、设计、测试和评估等研究环节,以实现对基于自适应算法的无刷直流电机控制器的研究和设计。
四、预期结果:通过本次研究,预计可以实现以下预期结果:1. 建立基于自适应算法的无刷直流电机控制系统,实现快速响应、高效转速控制等特点;2. 通过与传统PID控制器的比较,验证自适应算法的优越性和实用性;3. 将该控制器应用于实际工程项目中,提高无刷直流电机的控制效率和稳定性。
五、可行性分析:本研究基于自适应算法的无刷直流电机控制器,借鉴了已有的文献和研究成果,有一定的可行性。
同时,本研究中涉及的模型建立、电路设计和仿真实验等环节都有相关的理论和技术支持,可以保证研究的可行性。
六、研究计划:2021年11月-2022年3月:开题策划、文献研究、模型建立;2022年4月-2022年8月:控制器设计、电路仿真、性能测试;2022年9月-2022年10月:数据处理、实验验证、结论总结;2022年11月-2023年2月:论文撰写、论文答辩、论文修改、毕业设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:20011220
驱动控制
参数自适应控制在直流无刷电机驱动器中的应用
江晓光1,曲家骐2
(1.上海交通大学,上海200030;2.信息产业部电子第21研究所,上海200233)
Application of P arameter Self -adjust Control in B rushless DC Motor Driver
JIANG Xiao -guang 1
,QU Jia -qi
2
(1.Shanghai Jiaotong University ,Shanghai 200030,China ;
2.Elec.No.21Research Institute under the Ministry of In formation Industry ,Shanghai 200233,China )
摘 要:简要探讨基于数字信号处理芯片的参数自适应控制在直流无刷电机驱动控制器中的应用。
关键词:直流无刷电动机;数字信号处理器;参数自适应控制
中图分类号:TM33 文献标识码:A 文章编号:1004-7018(2002)02-0031-02
Abstract :This paper introduces the application of parameter self -adjust control in designing of brushless DC m otor driver based on DSP.
K eyw ords :brushless DC m otor ;DSP ;parameter self -adjust control
1引 言
直流无刷电动机是随着电力电子技术和高性能永磁材料而迅速发展并得到广泛应用的新机种。
众所周知,直流无刷电动机具有交流电动机结构简单,运行可靠,维护方便,寿命长的特点,又具有普通直流电动机良好的机械特性和调速性。
目前,在许多要求高的电力驱动系统中得到越来越广泛的应用。
但是,传统设计直流无刷电机驱动控制器时,驱动控制器的校正环节常是固定单一参数,出现在一种工况下较好满足性能要求,在工况变化后,就不能满足要求。
为此,设计出能满足复杂工况和要求较高的直流无刷电机驱动器,尽量发挥直流电机的优良性能,是很值得研究的课题。
2参数自适应控制的应用
参数自适应控制是通过辨识被控对象或系统的特征参数、系统的实时状态,提供信息来较正系统,从而使系统实现自适应控制方式。
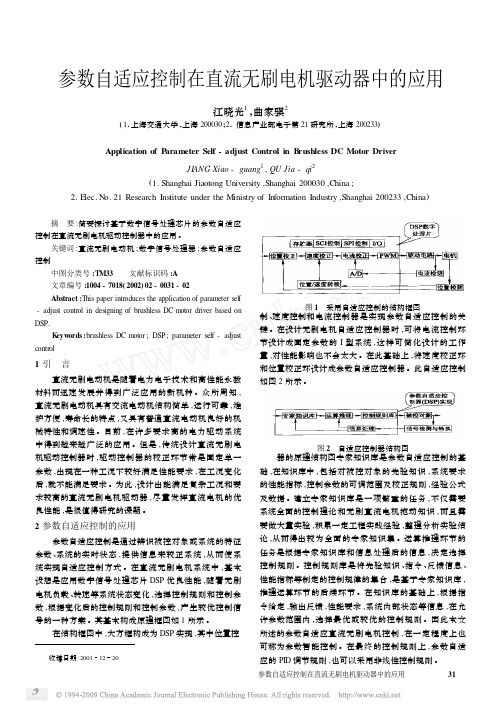
在直流无刷电机系统中,基本设想是应用数字信号处理芯片DSP 优良性能,随着无刷电机负载、转速等系统状态变化,选择控制规则和控制参数,根据变化后的控制规则和控制参数,产生较优控制信号的一种方案。
其基本构成原理框图如1所示。
在结构框图中,大方框构成为DSP 实现,
其中位置控
图1 采用自适应控制的结构框图
制、速度控制和电流控制器是实现参数自适应控制的关键。
在设计无刷电机自适应控制器时,可将电流控制环节设计成固定参数的I 型系统,这样可简化设计的工作量,对性能影响也不会太大。
在此基础上,将速度校正环和位置校正环设计成参数自适应控制器。
此自适应控制如图2
所示。
图2 自适应控制器结构图
器的原理结构图专家知识库是参数自适应控制的基础,在知识库中,包括对被控对象的先验知识,系统要求的性能指标,控制参数的可调范围及校正规则,经验公式及数据。
建立专家知识库是一项繁重的任务,不仅需要系统全面的控制理论和无刷直流电机拖动知识,而且需要做大量实验,积累一定工程实践经验,整理分析实验结论,从而得出较为全面的专家知识集。
运算推理环节的任务是根据专家知识库和信息处理后的信息,决定选择控制规则。
控制规则库是将先验知识、指令、反馈信息、性能指标等制定的控制规律的集合,是基于专家知识库,推理运算环节的后续环节。
在知识库的基础上,根据指令给定,输出反馈,性能要求,系统内部状态等信息,在允许参数范围内,选择最优或较优的控制规则。
因此本文所述的参数自适应直流无刷电机控制,在一定程度上也可称为参数智能控制。
在最终的控制规则上,参数自适应的PID 调节规则,也可以采用非线性控制规则。
1
3参数自适应控制在直流无刷电机驱动器中的应用
3应用实例
下面举例说明参数自适应数字化PID 在直流无刷电机中的应用。
为实现数字PID 控制,要对连续PID 算法离散化。
传统连续PID 控制方程:
M (t )=K p e (t )+K i ∫
t
e (t )d t +K d
d e (t )d t
式中:M (t )—控制器输出信号;
e (t )—控制器输入信号;K p —控制器比例增益;K i —控制器积分增益;K d —控制器微分增益。
为实现数字PID 技术的DSP 控制,需对上述PID 算法进行离散化处理。
位置式PID 控制算法的控制精度较高,但考虑到位置式PID 控制算法每一次输出都是全量输出,一旦出现故障可能会导致M (k )有较大幅度的输出变化,可能对驱动系统造成损害。
为此,采用下述增量式数字PID 控制算法。
ΔM (k )=M (k )-M (k -1)=
K p [e (k )-e (k -1)]+K i e (k )+K d [e (k )-2e (k -1)+e (k -2)]
令:
ΔM p (k )=K p [e (k )-e (k -1)]
ΔM i (k )=K i e (k )
ΔM d (k )=K d [e (k )-2e (k -1)+e (k -2)]
得:
ΔM (k )=ΔM p (k )+ΔM i (k )+ΔM d (k )
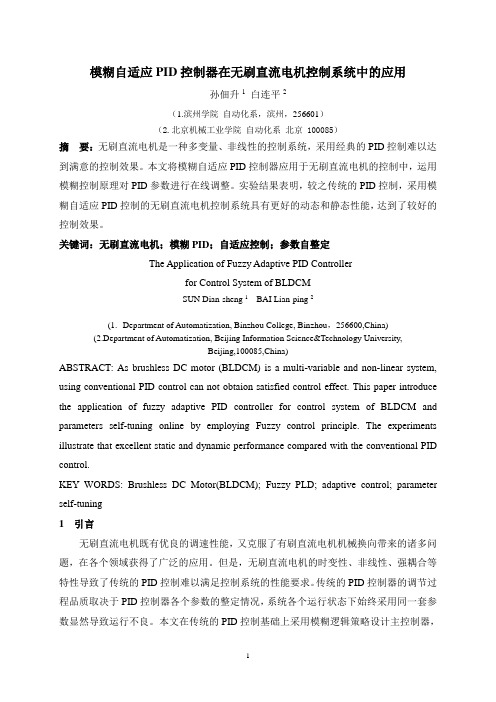
参数自适应数字PID 控制器的过程如图3所示。
参数自适应数字PID 控制器增益K p 、K d 、K i 和采样
周期T 的合理选择决定其控制品质,专家知识库根据反馈回的电枢绕组的电流值、电机转速,根据知识库内已有的信息,自动进行选择调整。
对于象直流无刷电动机这
图3 PI D 算法流程图
样的复杂系统,运行工况易于变化且环境恶劣时,也可以采用参数自寻优在线整定方法确定。
4结束语
本文介绍了参数自适应控制在直流无刷电机驱动器中的应用。
数字信号处理芯片的出现,使该构想的实现成为可能。
运用参数自适应控制,能设计出满足复杂多变工况和高性能直流无刷电机系统,充分发挥无刷电机的优良性能。
参考文献:
[1] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,
1996.
[2] 徐南荣,程明熙.自适应控制[M].北京:国防工业出版社,1980.[3] 王季秩,曲家骐.执行电动机[M].北京:机械工业出版社,1997.
(上接第26页)获单元获得,采用边沿检测控制,只要任何
一路位置信号发生变化即产生中断;发动机油门采用步进电动机驱动,控制信号由定时器比较/PW M 输出;A/D 采样输入信号包括加速手柄位置、刹车信号、直流无刷电机总线电流、蓄电池端电压、电机温度、驱动板温度、发动机排气温度等。
速度检测通过测量电机的转速获得,即测量转子位置传感器发出的信号之间的间隔得到。
电机控制根据混合ECU 给出的电机转矩以及总线电流实现
PID 控制。
如图5
所示。
图5 并联型混合动力摩托车控制原理图
DSP 除了完成对直流无刷永磁电机、发动机、蓄电池
等的控制外,还应根据驾驶者给定的加速手柄位置信号和机车速度、转矩进行混合控制,按照能量管理控制最优策略确定系统运行模式,给出各部分应分担的能量输出或输入,实现优化控制。
对于系统运行模式的切换应平滑,减少冲击。
DSP 50ns 的指令周期能够满足系统的要求,对于转子位置信号和A/D 采样采用中断方式,加快响应速度。
一般用户界面和安全检查每10ms 运行一次,闭环控制每3ms 运行一次。
参考文献:
[1] Floyd A.W yczalek.Hybrid E lectric Vehicles in Europe and Japan[C].
IECEC ,1996:1919-1924.
[2] T im othy C M oore.HE V C ontrol S trategy :Im plications of Perform ance Crite 2
ria ,S ystem C on figuration and Design ,and C om ponent S election [C].Pro 2ceedings of the Am erican control C on ference ,1997:679-683.
[3] 邵定国.混合动力电动摩托车的控制策略和能量管理[C].上海:
2000第五届中国小电机技术会议,2000:75-80.
2
3 微特电机 2002年第2期。