电动汽车工况总结
纯电动汽车的性能指标

Ft—汽车驱动力(N); Ff—滚动阻力(N); Fi—坡道阻力(N); Fw—空气阻力(N)。
第三节 纯电动汽车的性能指标
根据汽车行驶方程可计算出最大坡度角α为:
在低速时,爬坡能力要大得多,基于式(4-4)的计算结
果将产生显著偏差,而应按式(4-6)计算如下:
第三节 纯电动汽车的性能指标
最短时间(单位为s)来评价。 M1 , N1类纯电动汽车,采用0一50km/h原地起步加速
时间和50一80km/h超车加速时间; M2 , M3类纯电动汽车,采用0一30km/h原地起步加速
时间和30一50 km/h超车加速时间。
第三节 纯电动汽车的性能指标
2.动力性指标
(3)爬坡能力
纯电动汽车的爬坡能力用坡道起步能力和爬坡车速来评价。 坡道起步能力是指纯电动汽车加载到最大设计总质量时在坡
好的硬路面上所能到达的最高车速。 1 km最高车速 通常简称为最高车速,是指纯电动汽车
能够往返各持续行驶lkm以上距离的最高平均车速。 30min最高车速 是指纯电动汽车能够持续行驶30min以
上的最高平均车速:
第三节 纯电动汽车的性能指标
2.动力性指标 (2)最大加速能力 纯电动汽车的加速能力用从速度v1加速到速度v2所需的
道上能够起动且1min内向上行驶至少10m的最大坡度。
爬坡车速是指加载到最大设计总质量后,纯电动汽车在给定
坡度(4%和12%)的坡道上能够持续行驶1 km以上的最高平均车 速。
第三节 纯电动汽车的性能指标
3.动力性指标的计算 (1)电动汽车最高车速的计算
电动机发出的功率全部消耗于车辆阻力。若电动机的
第三节 纯电动汽车的性能指标
4.续驶里程的影响因素分析
WLTC组合工况下电动汽车放电特征分析

技术改造—262—等相关规范和标准的要求,在电厂管道静力计算中得到了广泛应用。
为了便于分析和计算,根据力学中力的独立性原理,将管道应力分为两种,分别为由管道内压、自重和其他持续外载产生的轴向应力之和(称为一次应力)以及由热胀、冷缩和其它位移受约束而产生的热胀应力范围(称为二次应力)。
3.2 管道应力计算结果5号汽轮机高导管采用CAESARII2011软件进行应力计算,计算模型如图2所示,振动治理后管道的最大一次应力、最大二次应力如表1所示。
振动治理后,管道最大一次应力、最大二次应力分别为38.79%、21.75%,最大应力点位置分别为S1、S2。
图2 高压导汽管道应力计算模型图表1 5号汽轮机高导管治理后最大应力计算值管道应 力分类 计算值 (MPa) 允许应力 (MPa) 计算值/允 许应力(%) 最大应力 点位置 是否 合格 最大一 次应力 27.93 72.00 38.79 S1 合格 治理 后 最大二次应力 51.97238.9321.75S2合格结论振动治理后管道应力合格图3 5号汽轮机高导管治理前、后振动测量结果(350MW)4 应用效果在振动治理前、治理后,5号机组以顺序阀方式运行时用测量仪器(RION 3-Axis Vibration Meter VM-54)对高导管振动进行了检测,每种工况均选取了4处测点,分别为测点1-2、测点2-2、测点4-2、测点3-2。
振动治理前、后振动测量结果见图3、4、5。
机组负荷350MW 时,振动治理前、后高导管振动速度最大值分别为32.18mm/s(不合格)、14.49mm/s(合格),振动治理后较治理前最大振动速度降低了54.97%;机组负荷480MW 时,振动治理前、后高导管振动速度最大值分别为35.45mm/s(不合格)、13.69mm/s (合格),振动治理后较治理前振动速度最大值降低了61.38%;振动治理前,考虑到机组运行安全性,未以顺序阀方式在更高负荷下运行及检测,振动治理后,机组以顺序阀方式运行且负荷达到580MW 时高导管振动速度最大值为14.41mm(合格)。
新能源汽车总结(9篇)
新能源汽车总结(9篇)未来新能源汽车可以环保!只要有一点点光或风,它就能跑得很快,还能储存多余的能量,需要的时候就下大力气。
新能源汽车不仅环保,还有很多功能!按下蓝色的开关,它就会长出蝴蝶般多彩的翅膀,在蓝天上翱翔;再按下绿色开关,它就会像鸭子一样伸出四只脚,遨游大海;最后按下黄色按钮,马上就会缩小。
你可以把它放在口袋里,方便携带。
听了我的介绍,你一定很渴望尝试这种新能源汽车。
期待这一天的早日到来!现在汽车的状况不能满足我的想法。
比如,它不能净化空气,保护环境,更别说我想象中的汽车了。
它可以净化空气,保护环境。
接下来,我来介绍一下我的车。
车底呈三角形,有稳定性;车身是半圆形(略不规则),四周都是透明的窗户。
车前的雨刷比以前快了一百倍。
如果下猫狗雨,看不见,不影响视线;车前还有自动洗车功能,以后不用去洗车店了;汽车的轮胎也比以前的轮胎硬十倍。
汽车的作用也略有改变——汽车后备箱里有一台“自动气单生产机”,只要把“气单”放在一个“小气缸”里,“小气缸”就会沿着管道通到排气口,然后空气就可以净化了!后窗旁边,有一个“蓄水机”。
“蓄水机”旁边有一些小点。
这些小点是用来在水满后给花浇水的;事实上,这些“水”也不是水——它们是雨。
每当下起倾盆大雨,“蓄水机”就会储存雨水,所以“水”是纯天然的!天窗附近有一个“氧气罐”,它的排气口在车的前面。
氧气从排气口出来,这样人们就可以呼吸新鲜空气。
这是我的想法。
你也可以在生活中发明一些有趣的东西。
可能不一样,可能好玩,可能给人带来快乐。
加油!未来的智能汽车说到车,很多家庭已经有了,但是现在的车只能在陆地上“跑”了,那就抓紧时间和空间的机会看看未来的智能车吧!智能车外有超高级微型摄像头。
如果在“感应区”按下车主指纹,就会向车主发出信号,告诉车主在手机上发一条“可以用车”的信息,打开车门。
智能车的大灯也很先进:只要灯开的合适,灯就会自动亮,它会根据天空的亮度来调节灯光的亮度!车上有很多按钮,每个按钮都会有一个相对的颜色。
nedc工况法

nedc工况法摘要:1.NEDC工况法的概述2.NEDC工况法的测试过程3.NEDC工况法的评分标准4.NEDC工况法在我国的应用5.NEDC工况法的优缺点6.我国新能源汽车市场的现状和未来发展正文:一、NEDC工况法的概述EDC(New European Driving Cycle)工况法是一种用于评估新能源汽车续航里程、能耗和排放性能的测试方法。
它起源于欧洲,现已被全球多个国家和地区采用。
NEDC工况法通过模拟城市和郊区道路行驶工况,对新能源汽车的续航里程、能耗和排放进行综合评价。
二、NEDC工况法的测试过程EDC工况法测试过程分为两个阶段:市区工况和郊区工况。
市区工况主要包括怠速、加速、减速和巡航等环节,共16个循环。
郊区工况主要包括巡航、加速、减速和爬坡等环节,共8个循环。
在整个测试过程中,车辆需按照预设的行驶速度和加速度曲线进行行驶,以模拟实际道路驾驶工况。
三、NEDC工况法的评分标准EDC工况法评分标准主要包括续航里程、能耗和排放三个方面。
续航里程评分以实车测试数据为基础,对新能源汽车的续航能力进行评价。
能耗评分则根据车辆在测试过程中的平均能耗进行评定。
排放评分则根据车辆在测试过程中的二氧化碳排放量进行评定。
四、NEDC工况法在我国的应用我国在新能源汽车推广应用过程中,高度重视NEDC工况法的应用。
新能源汽车补贴政策、购置税减免政策等均以NEDC工况法为依据,对新能源汽车的续航里程、能耗和排放进行评价。
此外,我国还针对NEDC工况法进行了适应性修订,以更好地评估我国新能源汽车的实际性能。
五、NEDC工况法的优缺点EDC工况法的优点在于综合考虑了新能源汽车的续航、能耗和排放性能,具有较高的可重复性和可靠性。
然而,NEDC工况法也存在一定的局限性,如测试工况较为理想化,未能充分体现实际道路驾驶中的复杂性。
六、我国新能源汽车市场的现状和未来发展我国新能源汽车市场近年来呈现出快速发展的态势,已成为全球最大的新能源汽车市场。
武汉市电动汽车行驶工况研究
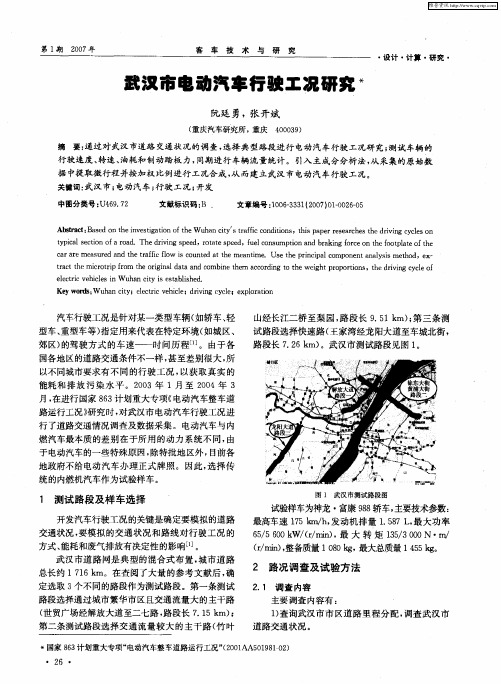
山经长江二桥至梨园 , 路段长 9 5 m)第三条测 . 1k ;
试路段选择快速路 ( 王家湾经龙 阳大道至车城北街 ,
路段长 ( mn, r i 整备质量 1 8 g 最尢 总 / ) 0k , 0 质量 1 5 g 5 。 4 k
2 路况调 查及试验方法
2 1 调 查 内容 . 主要 调查 内容 有 :
1查询武汉市市 区道路 里程分配 , ) 调查武汉市
道路 交通 状况 。
*国家 8 3计划重大专项“ 6 电动汽车整车道路运行工况” 2 0 AA5 18 2 (0 1 0 9 10 )
・ 26 ・
维普资讯
设计 ・ 计算 ・ 究 ・ 研
・
客
车
技
术
与
研
究
20 年 07
第1 期
2 i试路段上车辆交通状况, ) ̄ 即在试验时, 同期对
在众多的参考文献中, 采用 的描述性参数大 所 多相同, 只有一些 个别的差异。文献 [] 4 中采用 1 1
行驶 速度、 速、 耗和 踏板力, 期 转 油 制动 同 进行车 辆流量 统计。引 入主成分 析法, 采集的 始数 分 从 原
据 中提取微行程并按加权 比例进行工况合成 , 而建立武汉市电动汽车行驶工况。 从 关键词: 武汉市; 电动汽车 ; 行驶工况; 开发
中图分类号 : 6 . 2 U4 9 7 文献标识码 : . B 文章编号 :0 63 3 0 7 0 —0 60 1 0—3 1 0 )10 2 —5 c 2
地政府不给电动汽车办理正式牌照 。因此, 选择传 统的内燃机汽车作为试验样车 。
纯电动汽车变工况运行能效分析
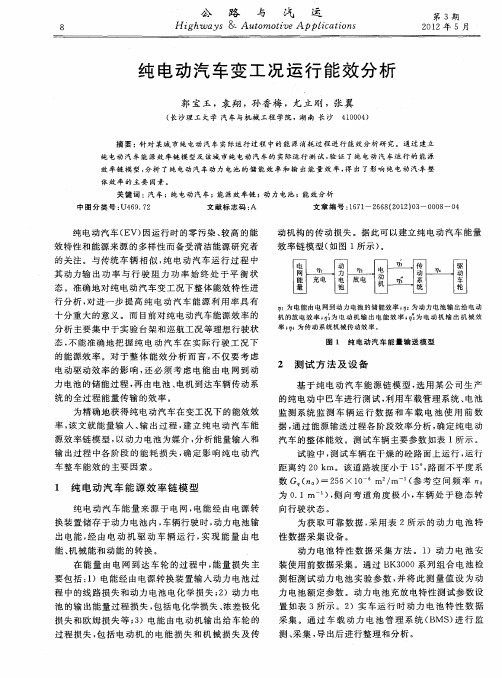
3 2 V, 定 容 量 . 额 1 0Ah 6 额 定 内 阻 0 2 m Q
,
.
≥ 10 6
表 2 动 力 电池 特 性 数 据 采 集 设 备
设 备 名 称
设 备 功能
60
一≤ 5 0
鹾 4 O
謇 善i
薹 主 蚕
。6 5 池 测 试 、 集 动 力 电 池 的 阻 抗 值 采
H
体效 率 的 主要 因素 。
关 键 词 :汽 车 ;纯 电动 汽 车 ; 源 效 率 链 ; 力 电 池 ;能 效 分 析 能 动
中 图分 类 号 : 6 . 2 U4 9 7 文献标志码 : A 文章 编 号 :6 1 6 8 2 1 ) 3 0 8 4 1 7 —2 6 ( 0 2 0 —0 0 —0
总 第 1 0期 5
Hih y g wa s& Auo tv tmoieApp ia in lc to s
表 1 纯 电动 汽 车 整 车 主 要 参 数
9
项目
参 数 值
项目
参数 值
车 型
轮 胎 规 格
F 72 Y6 0
7 0 R,. O 6 T .0 6 5R1 L
行 分析 , 对进 一 步提 高 纯 电动 汽 车能 源 利 用率 具 有 十分重 大 的意义 。而 目前 对纯 电动汽车 能源效 率 的 分析 主要集 中于实 验 台架 和巡航 工况 等理想 行驶 状 态 , 能准确 地 把握 纯 电 动汽 车 在 实 际行 驶 工 况下 不
与
汽 迢
公僦
路&
A
纯 电动汽 车 ( V) E 因运行 时 的零 污染 、 高 的能 较
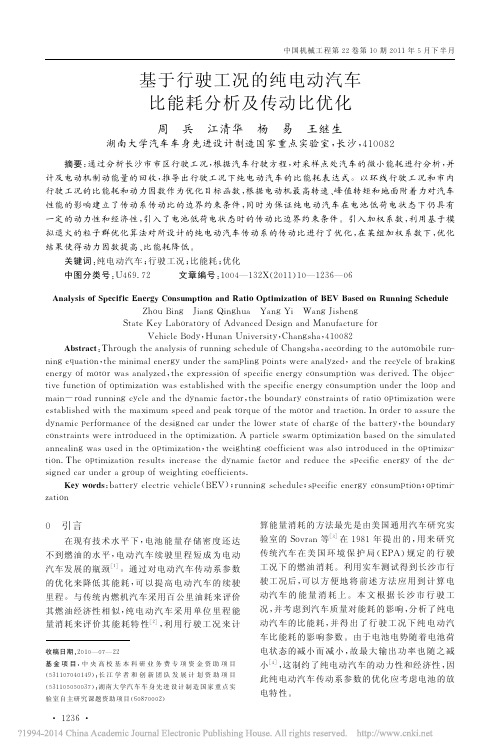
基于行驶工况的纯电动汽车比能耗分析及传动比优化_周兵
, 利用行驶工况来计
此纯电动汽车传动系参数的优化应考虑电池的放 电特性 。
·1 2 3 6·
— — 周 兵 江清华 杨 易等 基于行驶工况的纯电动汽车比能耗分析及传动比优化 —
1 长沙市区行驶工况调查
针对长沙市行驶工况对纯电动汽车性能的影 响, 以 所 设 计 的 纯 电 动 汽 车 的 基 础 车 采 集 数 据。 该基础车整车质 量 、 电动机功率和转矩与所设计 的纯电动汽车比 较 接 近 , 因此可利用调查数据对 所设计的纯电动汽车进行分析
中国机械工程第 2 2 卷第 1 0期2 0 1 1 年 5 月下半月
基于行驶工况的纯电动汽车 比能耗分析及传动比优化
周 兵 江清华 杨 易 王继生
湖南大学汽车车身先进设计制造国家重点实验室 , 长沙 , 4 1 0 0 8 2
摘要 : 通过分析长沙市市区行驶工况 , 根据汽车行驶方程 , 对采样点处汽车的微小能耗进行分析 , 并 计及电动机制动能量的回收 , 推导出行驶工况下纯电动汽车的比能耗 表 达 式 。 以 环 线 行 驶 工 况 和 市 内 行驶工况的比能耗和动力因数作为优化目标函数 , 根据电动机最高转速 、 峰值转矩和地面附着力对汽车 同时为保证纯电动汽车 在 电 池 低 荷 电 状 态 下 仍 具 有 性能的影响建立了传动系传动比的边界约束条件 , 一定的动力性和经济性 , 引入了电池低荷电状态时的传动比边界约束条件 。 引入加权系数 , 利用基于模 拟退火的粒子群优化算法对所设计的纯电动汽车传动系的传动比进行了优化 , 在某组加权系数下 , 优化 结果使得动力因数提高 、 比能耗降低 。 关键词 : 纯电动汽车 ; 行驶工况 ; 比能耗 ; 优化 ) 中图分类号 : U 4 6 9. 7 2 文章编号 : 1 0 0 4—1 3 2 X( 2 0 1 1 1 0—1 2 3 6—0 6 A n a l s i s o f S e c i f i c E n e r C o n s u m t i o n a n d R a t i o O t i m i z a t i o n o f B E V B a s e d o n R u n n i n S c h e d u l e y p g y p p g Z h o u B i n J i a n Q i n h u a a n Y i a n J i s h e n Y W g g g g g g S t a t e K e L a b o r a t o r o f A d v a n c e d D e s i n a n d M a n u f a c t u r e f o r y y g , , , V e h i c l e B o d H u n a n U n i v e r s i t C h a n s h a 4 1 0 0 8 2 y y g : , A b s t r a c t T h r o u h t h e a n a l s i s o f r u n n i n s c h e d u l e o f C h a n s h a a c c o r d i n t o t h e a u t o m o b i l e r u n - g y g g g , , o i n t s n i n e u a t i o n t h e m i n i m a l e n e r u n d e r t h e s a m l i n w e r e a n a l z e d a n d t h e r e c c l e o f b r a k i n p g q g y p g y y g , o f m o t o r w a s a n a l z e d t h e e x r e s s i o n o f s e c i f i c e n e r c o n s u m t i o n w a s d e r i v e d . T h e o b e c e n e r - y p p g y p j g y t i v e f u n c t i o n o f o t i m i z a t i o n w a s e s t a b l i s h e d w i t h t h e s e c i f i c e n e r c o n s u m t i o n u n d e r t h e l o o a n d p p g y p p , m a i n- r o a d r u n n i n c c l e a n d t h e d n a m i c f a c t o r t h e b o u n d a r c o n s t r a i n t s o f r a t i o o t i m i z a t i o n w e r e g y y y p w i t h t h e m a x i m u m s e e d a n d t o r u e o f t h e m o t o r a n d t r a c t i o n. I n o r d e r t o a s s u r e t h e e s t a b l i s h e d e a k p q p , d n a m i c e r f o r m a n c e o f t h e d e s i n e d c a r u n d e r t h e l o w e r s t a t e o f c h a r e o f t h e b a t t e r t h e b o u n d a r y p g g y y w e r e i n t r o d u c e d i n t h e o t i m i z a t i o n. A a r t i c l e s w a r m o t i m i z a t i o n b a s e d o n t h e s i m u l a t e d c o n s t r a i n t s p p p , a n n e a l i n w a s u s e d i n t h e o t i m i z a t i o nt h e w e i h t i n c o e f f i c i e n t w a s a l s o i n t r o d u c e d i n t h e o t i m i z a - g p g g p t i o n. T h e o t i m i z a t i o n r e s u l t s i n c r e a s e t h e d n a m i c f a c t o r a n d r e d u c e t h e s e c i f i c e n e r o f t h e d e - p y p g y s i n e d c a r u n d e r a r o u o f w e i h t i n c o e f f i c i e n t s . g g p g g : ( ; ; ; K e w o r d s b a t t e r e l e c t r i c v e h i c l e B E V) r u n n i n s c h e d u l e s e c i f i c e n e r c o n s u m t i o n o t i m i - y g p g y p p y z a t i o n
电动汽车论文总结范文
摘要:随着全球能源危机和环境问题的日益凸显,电动汽车作为一种绿色、环保的交通工具,受到了广泛关注。
本文对电动汽车技术发展现状进行总结,并对未来发展趋势进行展望。
一、电动汽车技术发展现状1. 电池技术电动汽车的核心技术之一是电池技术。
目前,电动汽车主要采用锂离子电池、镍氢电池和燃料电池等。
锂离子电池因其高能量密度、长循环寿命和低自放电率等优点,成为电动汽车电池的主流选择。
然而,锂离子电池仍存在成本高、安全性等问题。
未来,电池技术的研究方向主要集中在提高能量密度、降低成本、提升安全性能等方面。
2. 电机及驱动技术电动汽车的电机及驱动技术是保证车辆动力性能的关键。
目前,电动汽车主要采用永磁同步电机和感应电机。
永磁同步电机具有高效、轻量化、高功率密度等优点,已成为电动汽车电机的主流选择。
驱动技术方面,目前主要采用交流异步电机驱动和永磁同步电机驱动两种方式。
未来,电机及驱动技术的研究方向主要集中在提高效率、降低噪音、减小体积和重量等方面。
3. 能量管理技术能量管理技术是电动汽车的关键技术之一,它关系到电动汽车的续航里程、充电效率和电池寿命等。
目前,能量管理技术主要包括电池管理系统(BMS)、电机控制器和整车能量管理系统等。
未来,能量管理技术的研究方向主要集中在提高电池使用寿命、降低能耗、优化充电策略等方面。
4. 充电技术充电技术是电动汽车推广应用的重要保障。
目前,电动汽车主要采用慢充和快充两种充电方式。
慢充充电时间长,适用于夜间充电;快充充电速度快,适用于临时充电。
未来,充电技术的研究方向主要集中在提高充电效率、缩短充电时间、降低充电成本等方面。
二、电动汽车技术发展趋势1. 电池技术:未来电动汽车电池技术将朝着高能量密度、低成本、长寿命、安全可靠的方向发展。
新型电池材料、电池结构设计、电池管理系统等方面将得到进一步优化。
2. 电机及驱动技术:电机及驱动技术将朝着高效、轻量化、小型化的方向发展。
新型电机材料、电机结构设计、驱动控制策略等方面将得到突破。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、世界现有工况情况
车辆在道路上的行驶状况可用一些参数(如加速、减速、匀速和怠速等)来反应,对这种运动特征的调查和解析,绘制出能够代表车辆运动状况,表达形式为速度--时间的曲线,即为车辆形式工况图。
行驶工况分类:
按行驶工况构造形式分为:以美国工况FTP-75为代表的实际行驶工况(瞬态工况);
以欧洲工况ECE+EDUC为代表的合成行驶工况(模态工况)。
按行驶工况的使用目的分为:
认证工况:由权威部门颁布,具有法规效用;通用的评价标准,认证工况范围宽,对低于、、地域针对性不强,是一种由大量真实道路工况合成出的具有代表性的工况。
如:日本的10.15工况、欧洲经济委员会的ECE-R15工况、美国联邦城市及高速公路循环CSC-C/H,我国的城市客车四工况循环等。
研究工况:研究工况对车辆的影响比认证工况严厉,在车辆设计开发过程中,为了满足研究需要,有地方型或城市型的代表性车辆行驶工况研究。
这种工况在速度区间分布上,研究工况范围窄,需要考虑极端的情形。
很多地区和典型城市有各自的“实际行驶工况”,如纽约城市工况、纽约公交车工况、北京市公交车工况等。
I/M工况:用于车辆的排放测试,操作时间短,一般不超过10分钟。
世界范围内车辆排放测试用行驶工况分为3组:美国行驶工况(USDC)、欧洲行驶工况(EDC)和日本行驶工况(JDC)。
美国FTP(联邦认证程序)为代表的瞬态工况(FTP72)和ECE为代表的模态工况(NEDC)为世界各国采用。
A.美国行驶工况
美国行驶工况种类繁多,用途各异,大致包括认证用(FTP系)、研究用(WVU系)和短工况(I/M系)3大体系,广为熟知的有联邦测试程序(FTP75)、洛杉矶92(LA92)和负荷模拟工况(IM240)等行驶工况。
1、乘用车和轻型载货汽车用行驶工况
(1)1972年美国环保局(简称EPA)用作认证车辆排放的测试程序(简称FTP72,又称UDDS)。
FTP72由冷态过渡工况(0"505s)和稳态工况(506 1370s)构成。
(2)1975年在FTP72基础上加上600s热浸车和热态过渡工况(重复冷态过渡工况)。
4
个阶段构成FTP75,持续时间2475s。
(3)考虑了道路变化的US06、车辆开空调满负荷运行的SC03等,作为FTP的补充工况,形成SFTP(Supplement.FTP)。
(4)而被EPA用于乘用车高速公路燃油经济性测试的循环(HWFET),由于道路坡度对
于车辆油耗的影响,还开发了可变坡度的循环HWFET-MTN。
除了上述工况外,尚有以下几个研究成果。
①具有更高的最大速度和平均速度、较少的怠速运行时间和停车次数/英里,以及更高的
最大加速度的LA92(洛杉矶92)。
ARB02由CARB(加州环保署)开发的基于跟踪车辆的工况研究,它包括冷启动和行程结束部分,目的是测试车辆的实际操作研究结果则超出了FTP72的排放消减量。
③HL07EPA协同汽车制造商开发的发动机循环,目的是测试车辆在超出一定速度范围情况下的一系列加速能力;在这种加速情形下大多数车辆必须全开油门。
其用于在各种速度层级的开发和修正美国现有工况循环。
④针对未被FTP循环描述和覆盖的车辆运行工况区域,开发了一些工况循环。
如代表驾驶工况的REP05(RepFTP之外);根据启动状况研究的REM01(Remainder)循环。
它们以速度和加速度为目标,注重研究更加细致的瞬态变化效果。
(2)重型车用行驶工况
重型车辆的研究近年来有侧重于瞬态工况方面的趋势。
BAC被推荐作为测试重型车燃油经济性的操作规程(SAEJ1376)。
(仅找到SAEJ227a的图)
CBDl4是商业中心区域车辆测试循环,也是BAC复合测试循环的一部分,运用14个相同的循环模拟公交车停车——运行的驾驶模式。
CBDl4近似于CBDBUS循环,但是时间步长可变。
其它还有用于货车的CBDTRUCK循环、城郊通勤往返测试的COMMUTER循环。
比较著名的还有市内测功机测试循环(UD-DSHDV):模拟重型汽油机市内区域的操作,运行长度为1060s,33%为怠速、平均速度30.4km/h,并用于燃油蒸发排放测试。
纽约城市循环(NYCC)则更是代表了市内区域道路大型车辆的运动工况。
它们作为FTP 标准工况被广泛应用。
除了用于底盘测功机的工况外,对于重型车辆,还有使用在发动机台架上的代表性工况,它用发动机转速和转矩计算的车辆特性(最大功率比率、最大转矩)来描述。
测试工况循环包括一套稳定的按照发动机转速和转矩(欧洲和日本规则)定义的操作事项,或者是同时以瞬时发动机速度——转矩指示(美国规则)的“瞬态"循环。
B.欧洲行驶工况
用于在底盘测功机上认证轻型车排放的EDC,在欧洲又称为MVEG2A,现发展成为新EDC(NEDC)。
在该循环里局部循环速度是恒定的,是一种稳态工况。
包括市内(ECEl5)、市郊(EUDC)或市郊低功率车(EUDCL)。
ECEl5是一个包括4个代表市区驾驶状况的运转循环(Urban-DC),具有低速、低负荷和低排气温度的特性。
1992年开发了代表高速行驶工况的EUDC或EUDCLOW片段,在ECEl5基础上增加1个EUDC或EUDCLOW,就构成ECE+EUDC。
新欧洲运转循环(简称NEDC)持续时间为1220s,平均速度为32.12kn曲,最大加速度为1.06m/s2。
欧洲ECERl5.4所采用的运转循环,针对手动和自动挡车辆就考虑了这种差异的行驶距离和平均速度分别为4.06kin和18.7km/h以及3.98kin和18.4km/h。
这种循环模态循环,并不能代表真实的驾驶状况,存在着相当的局限性。
当欧洲循环被认为不充分时,研究人员确认FTP72循环能相对较好地满足欧洲城市的平均交通状况。
出于开发新型动力车辆的需要,欧洲基于BRITEEURAMHYZEM项目开发了一组称之为HYZEM循环的实际行驶工况,它属于瞬时循环。
HYZEM[12】包含了市内循环、市郊循环和高速循环。
比标准的欧洲循环更能代表驾驶条件。
相对于模态循环,其稳定速度部分要少很多。
平均速度40.4kngh,停车次数O.69次/kin,平均加速度0.71rigs2,最大加速度1.3州s2。
尚未被官方所采用,但已被各种研究广泛使用。
C.日本行驶工况
与欧洲行驶工况相似,日本工况也属于模态工况。
在1976年之前,日本一直采用10工况(10mode)来模拟市内行驶工况,重复6次,对后5次取样,即所谓热启动。
1976年度以后生产的车型,采用1lI况,从冷启动开始,重复4次循环,对全过程采样,行驶距离和平均速度分别为4.08km和30.6km/h。
1991年11月,采用了10.15工况,由4个10工况和1个15工况构成。
虽然10.15工况并未成为国际工况,但行驶工况的研究在日本仍得到持续和深入。
D、国内城市客车工况循环介绍
在法规采用的行驶工况中,我国现行的GBl8352.2——2001《轻型汽车排放污染物测试方法》和GBfr1 8368——200l《电动汽车一能量消耗率和续驶里程一试验方法》都是基于ECEl5工况的。
GBfT12545——200l《乘用车辆燃料消耗量试验方法》中模拟城市工况循环燃料消耗量试验也使用ECEl5I况。
与先进发达国家相比,我国对研究用汽车行驶工况方面的研究工作开展得较晚,真正意义上的开展主要集中在一些高校、研究所或大城市。
二、计算转矩和功率
当已知电动汽车的运行的速度时间图像,计算出加速度曲线,我们根据电动汽车的动力系统模型计算出电动汽车的转矩和转速的曲线。
具体如下:
电动汽车阻力方程:()2
01047.0v v Ac mgf F F F x t d r ++=+= 其中t r mgf F =为轮胎滚动摩擦阻力;()2
0047.0v v Ac F x d +=为空气阻力; 汽车行驶时的驱动力方程:()a m v v Ac mgf F F F b x t δδ+++=+=01047.0
其中a m F b δδ=为旋转转换算力;b δ为由于车轮等旋转部件的转动惯量引入的校正因子。
则转矩和功率的方程为:
()[]d b x t r a m v v Ac mgf T δ+++=0047.0
()[]3600/047.00v a m v v Ac mgf Fv P b x t δ+++==
当车辆爬坡时的方程式:
()[]d b x t r a m mg v v Ac mgf T δαα++++=sin 047.0cos 0 ()[]3600/sin 047.0cos 0v a m mg v v Ac mgf Fv P b x t δαα++++==
其中m 为整车质量;d r 为轮胎半径;g 为重力加速度;A 为车辆前部迎风面积;t f 为滚动阻力系数,与轮胎压力成正比;b δ为旋转质量换算系数;a 为车辆及速度;v 为车速;0v 为车前风速;x c 为空气阻力系数,一般为0.2~0.3。