数值分析:第八章 非线性方程(组)求根
数值分析第八章非线性方程解法

求 f (x) = 0 的根
其中f (x) 为非线性函数. 如
f ( x ) 3 x 5 2 x 4 x 1,
f ( x ) e 2 x 1 x ln(sin x ) 2.
1
上机作业:求下列方程的非零根
x 513 0.6651x f ( x ) ln 0. 513 0.6651x 1400 0.0918
解
f (1) 9 0, f ( 2) 8 0, [1, 2]为有根区间;
f '( x ) 3 x 2 10 0, f (x)单调增加, 方程有唯一根.
对分区间次数
ln( 2 1) ln(0.5 104 ) n 1 13.288. ln 2 取 n=14.
8
n
0 1
f ( x ) x 3 10 x 20 0 计算结果如下表: an bn xn
1 2 1.5 1.75
f ( xn )
1.6.. 2.8..
1.5 1.5 ...
2 1.75 ...
2 ...
1.625 ...
0.54.. ...
12 1.5944825 1.5947266 1.5946046 0.0007...
L | x * xk 1 | ...... L | x * x0 | 0
k
1 | xk 1 xk | ? ④ | x * xk | 1 L
| xk 1 xk | | x * xk | | x * xk 1 |可用 |*xxk |xk L | x * xk | | x k 1 |来
~ ( x* x )(1 g( ξ )) 0
数值分析第八章 非线性方程(组)求根
足精度要求的根。计算过程如表8.2.1所示
表8.2.1
k
0 1 2 3 4 5 6 7
所以,
f(ak)及符号
0(-) 0(-) 0(-) 0(-) 0.0625(-) 0.0625(-) 0.078125(-) 0.0859375(-)
f(xk)及符号
0.5(+) 0.25(+) 0.125(+) 0.0625(-) 0.09375(+) 0.078125(-) 0.0859375(-)
1.画出 f(x) 的略图,从而看出曲线与x 轴交点的位置。 f(x)
x0 a x0 h
x* b
2.从左端点x = a出发,按某个预先选定的步长h 一步一步地向右跨,每跨一步都检验每步起点x0
和终点x0 + h的函数值,若 f (x0 ) f (x0 h) 0
那么所求的根x*必在x0与x0+h之间,这里可取x0或x0+h 作为根的初始近似。
反复执行步骤2、3,便可得到一系列有根区间:
[a,b] [a1, b1] [a2, b2 ] [an , bn ]
4、当 bk1 ak1 时,停止;
注:
xk 1
1 2 (ak
bk )
即为根的近似。
当 n 时,bn an 0 ,即这些区间必将收缩于一点,也就是 方程的根。在实际计算中,只要[an ,bn ] 的区间长度小于预定容
第八章
非线性 方程(组)求根
问题驱动:全球定位系统(GPS)
人类对导航和定位的需求是伴随着人类整个文明历史的进 步而发展的,中国古代“四大发明”之一的指南针是最早的定 位仪器和系统,其后还有经纬仪以及近代的雷达。如图8.1.1所 示全球定位系统(GPS)是基于卫星的导航系统,最早由美国 和前苏联分别在80年代研制,并于1993年正式投入使用。现 代社会中全球定位系统越来越深入到人们生活的方方面面。例 如市场上出售的手持型GPS,定位的精度可以达到10米以内, 这无疑给旅行者提供了方便;安装有GPS的儿童手表,家长在 家里的计算机上可以追踪到孩子的位置,防止儿童走 失;安装有GPS系统的汽车可以帮助新司机辨识道路等等。
非线性方程求根
几何含义:求曲线 y = (x) 与直线 y = x 的交点
18:28:03
Numerical Analysis
9
y p0 x0 y
18:28:03
y=x
p1
y= (x)
✓
y p0
y=x
✓
p1 y= (x)
x x1 x2 x*
x0
(x) ( y) L x y
则(x) 在 [a,b] 上存在唯一的不动点 x*
证明:P216
18:28:03
Numerical Analysis
12
收敛性分析
不动点迭代的收敛性
定理:设 (x) C[a,b] 且满足
(1) 对任意的 x[a,b] 有 (x)[a,b]
(2) 存在常数 0<L<1,使得任意的 x, y[a,b] 有
for k = 1 : n x = g(x); fprintf('k=%2d, x=%.7f\n',k,x); if abs(x-xt)<tol, break, end
end xt = fzero(f,[3,4]);
fprintf('True solution: x = %.7f\n', xt)
% Steffenson 加速
性质:若
lim
k
xk
x *,则不动点迭代收敛,且 x*
是 f(x)=0 的解;否则迭代法发散。
18:28:03
Numerical Analysis
11
解的存在唯一性
解的存在唯一性
定理:设 (x) C[a,b] 且满足
数值分析非线性方程的数值解法

数值分析非线性方程的数值解法数值分析是一种应用数学方法来分析和解决数学问题的领域。
非线性方程是数值分析中一类重要的问题,其解法包括了迭代法、牛顿法、割线法等。
本文将详细介绍这些数值解法及其原理和应用。
一、迭代法迭代法是解非线性方程的一种常用数值方法。
该方法的基本思想是通过不断迭代逼近方程的根,直到达到所需精度或满足停止准则为止。
迭代法的求根过程如下:1.选择适当的初始值x0。
2. 利用迭代公式xn+1 = g(xn),计算下一个近似根。
3.重复步骤2,直到满足停止准则为止。
常用的迭代法有简单迭代法、弦截法和牛顿法。
简单迭代法的迭代公式为xn+1 = f(xn),其中f(x)为原方程的一个改写形式。
该方法的收敛性要求函数f(x)在解附近有收敛性且导数在一个区间内收敛。
弦截法的迭代公式为xn+1 = xn - f(xn) * (xn-xn-1) / (f(xn)-f(xn-1))。
该方法通过连接两个点上的函数值的割线来逼近方程的根。
牛顿法的迭代公式为xn+1 = xn - f(xn) / f'(xn),其中f'(x)为f(x)的导数。
该方法通过用切线来逼近方程的根。
二、牛顿法牛顿法是解非线性方程的一种常用迭代法。
该方法通过使用方程的导数来逼近方程的根。
迭代过程如下:1.选择适当的初始值x0。
2. 利用迭代公式xn+1 = xn - f(xn) / f'(xn),计算下一个近似根。
3.重复步骤2,直到满足停止准则为止。
牛顿法的收敛速度较快,但要求方程的导数存在且不为0。
三、割线法割线法是解非线性方程的另一种常用迭代法。
该方法通过连接两个点上的函数值的割线来逼近方程的根。
迭代过程如下:1.选择适当的初始值x0和x12. 计算下一个近似根xn+1 = xn - f(xn) * (xn-xn-1) / (f(xn)-f(xn-1))。
3.重复步骤2,直到满足停止准则为止。
割线法的收敛速度介于简单迭代法和牛顿法之间。
数值分析实验报告——非线性方程求根

数值分析实验报告——非线性方程求根一、实验目的:1.掌握求解非线性方程的常用方法;2.了解非线性方程求根问题的数值解法;3.熟悉使用数值分析软件进行非线性方程求根的实现。
二、实验原理:非线性方程指的是形如f(x)=0的方程,其中f(x)是一个非线性函数。
非线性方程求根的常用方法包括二分法、割线法和牛顿法等。
其中,二分法是通过不断缩小区间范围来逼近方程的解;割线法是通过使用割线来逼近方程的解;牛顿法则是通过使用切线来逼近方程的解。
对于给定的非线性方程,可以根据实际情况选择合适的方法进行求根。
三、实验内容:1.编写求解非线性方程的函数,包括二分法、割线法和牛顿法;2.使用编写的函数求解给定的非线性方程,比较各个方法的收敛速度和精确程度;3.根据实际情况分析和选择合适的方法进行求根。
四、实验步骤:1.针对给定的非线性方程,编写二分法的函数实现:(1)首先确定方程的解存在的区间;(2)根据方程的解存在的区间,使用二分法逐步缩小区间范围;(3)根据设定的精度要求,不断循环迭代,直至满足要求或达到迭代次数限制;2.针对给定的非线性方程,编写割线法的函数实现:(1)首先需要确定方程的解存在的初始点;(2)根据方程的解存在的初始点,根据割线的定义进行迭代;(3)设定迭代的精度要求和限制次数,结束迭代;3.针对给定的非线性方程,编写牛顿法的函数实现:(1)首先需要确定方程的解存在的初始点;(2)根据方程的解存在的初始点,根据牛顿法的定义进行迭代;(3)设定迭代的精度要求和限制次数,结束迭代;4.根据给定的非线性方程,分别使用二分法、割线法和牛顿法进行求解,并比较各个方法的收敛速度和精确程度;5.分析实际情况,选择合适的方法进行求解。
五、实验结果:4.通过比较,发现割线法和牛顿法的收敛速度较快,精确程度较高,因此选择割线法进行求解。
六、实验总结:通过本次实验,我掌握了求解非线性方程的常用方法,并使用数值分析软件实现了二分法、割线法和牛顿法。
数值分析课后参考答案08

第八章习题解答1、已知方程3210x x --=在 1.5x =附近有根,将方程写成以下三种不同的等价形式:①211x x=+;②x =x =试判断以上三种格式迭代函数的收敛性,并选出一种较好的格式。
解:①令121()1x x ϕ=+,则'132()x x ϕ=-,'132(1.5)0.592611.5ϕ=≈<,故迭代收敛;②令2()x ϕ=2'2322()(1)3x x x ϕ-=+,'2(1.5)0.45581ϕ≈<,故迭代收敛;③令3()x ϕ='3()x ϕ=,'3(1.5) 1.41421ϕ≈>,故迭代发散。
以上三中以第二种迭代格式较好。
2、设方程()0f x =有根,且'0()m f x M <≤≤。
试证明由迭代格式1()k k k x x f x λ+=-(0,1,2,)k = 产生的迭代序列{}0k k x ∞=对任意的初值0(,)x ∈-∞+∞,当20Mλ<<时,均收敛于方程的根。
证明:设()()x x f x ϕλ=-,则''()1()x f x ϕλ=-,故'1()1M x m λϕλ-<<-,进而可知, 当20Mλ<<时,'1()1x ϕ-<<,即'()1x ϕ<,从而由压缩映像定理可知结论成立。
3、试分别用Newton 法和割线法求以下方程的根cos 0x x -= 取初值010.5,4x x π==,比较计算结果。
解:Newton 法:1230.75522242,=0.73914166,=0.73908513x x x =; 割线法:23450.73638414,=0.73905814,=0.73908515,=0.73908513x x x x =; 比较可知Newton 法比割线法收敛速度稍快。
数值分析-求根方程

∴ 取φ ( x ) =
令x0 = 4, 于是得到如下迭代序列:
2
( x − 3),即迭代格式xk +1
2
1 2 = ( xk − 3)。 2
1 2 x1 = ( x0 − 3) = 6.5 2 1 2 x2 = ( x1 − 3) = 19.625 2 1 2 x3 = ( x2 − 3) = 191.0703125 2 1 2 x4 = ( x3 − 3) = 18252.432159423828125 2 1 2 x5 = ( x4 − 3) = 166575638.36718459473922848701477 2 M
§1 §2 §3 §4
§5
引言 二分法 迭代法 牛顿法 劈因子法
引言 /* Introduction */
求 f (x) = 0 的根 1. 基本概念
方程f (x)=0,如果存在某个 ,使得 (x*)=0。则称 为 如果存在某个x*,使得f 方程 如果存在某个 。则称x*为 方程f 的根或者称为函数f 的零点 的零点。 方程 (x) = 0 的根或者称为函数 (x)的零点。
为迭代格式(迭代公式 称xn+1 =φ(xn)为迭代格式 迭代公式 ;φ(x)为迭代 为迭代格式 迭代公式); 为迭代 函数; 为迭代序列; 函数;求得序列 x ∞ 为迭代序列;上述求根方 法称为迭代法。 法称为迭代法。 k k=0
{ }
例:给定方程 f (x)=x2-2x-3=0,显然它在区间 ,显然它在区间[2,4] 内有唯一实根x*=3。按不同迭代格式来求此解。 内有唯一实根 。按不同迭代格式来求此解。 解:1) f ( x ) = x 2 − 2 x − 3 = 0 ⇔ x = 2 x + 3
数值分析实验报告——非线性方程求根
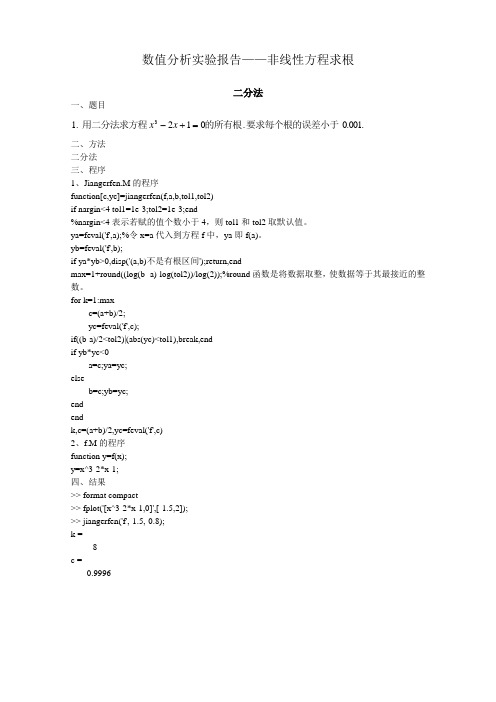
数值分析实验报告——非线性方程求根二分法一、题目用二分法求方程=的所有根x.13要求每个根的误差小于-x+0.001..21二、方法二分法三、程序1、Jiangerfen.M的程序function[c,yc]=jiangerfen(f,a,b,tol1,tol2)if nargin<4 tol1=1e-3;tol2=1e-3;end%nargin<4表示若赋的值个数小于4,则tol1和tol2取默认值。
ya=feval('f',a);%令x=a代入到方程f中,ya即f(a)。
yb=feval('f',b);if ya*yb>0,disp('(a,b)不是有根区间');return,endmax=1+round((log(b -a)-log(tol2))/log(2));%round函数是将数据取整,使数据等于其最接近的整数。
for k=1:maxc=(a+b)/2;yc=feval('f',c);if((b-a)/2<tol2)|(abs(yc)<tol1),break,endif yb*yc<0a=c;ya=yc;elseb=c;yb=yc;endendk,c=(a+b)/2,yc=feval('f',c)2、f.M的程序function y=f(x);y=x^3-2*x-1;四、结果>> format compact>> fplot('[x^3-2*x-1,0]',[-1.5,2]);>> jiangerfen('f',-1.5,-0.8);k =8c =-0.9996yc =3.9017e-004>> jiangerfen('f',-0.8,-0.3);k =8c =-0.6184yc =2.7772e-004>> jiangerfen('f',1.3,2);k =10c =1.6179yc =-9.5348e-004>> jiangerfen('f',2,3);(a,b)不是有根区间方程f(x)=x^3-2*x-1的所有根为-0.9996,-0.6184 ,1.6179 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
足精度要求的根。计算过程如表8.2.1所示
表8.2.1
k
0 1 2 3 4 5 6 7
所以,
f(ak)及符号
0(-) 0(-) 0(-) 0(-) 0.0625(-) 0.0625(-) 0.078125(-) 0.0859375(-)
f(xk)及符号
0.5(+) 0.25(+) 0.125(+) 0.0625(-) 0.09375(+) 0.078125(-) 0.0859375(-)
因而, f (x) 是严格单调的, f (x) 0 最多有一个根, 又因为 f (0) 1 0, f (1) e 8 0 所以, f (x) 0 有唯一实根 x* (0,1)
用二分法求解,要使 xk x* 0.5102,只要
1 0 2k 1
0.5 102
解得 k 2 6.64,取 k 7 。所以只要二等分7次,即可求得满
开始
读入a, h
a x0 f (x0) y0
x0 + h x0
f (x0) y0>0
打印 否
结束
是 继续扫描
例1:考察方程
f (x) x3 x 1 0
x
0
0.5
f (x) 的符号 -
-
1.0
1.5
-
+
§1 二 分 法
a
xa1 x*
xb2 b
xk1 xk ε1 或 f ( x) ε2
图8.1.1 卫星定位示意图
美国和前苏联的GPS都包括有24颗卫星,它们不断地向地 球发射信号报告当前位置和发出信号的时间,卫星分布如图 8.1.2所示。它的基本原理是:在地球的任何一个位置,至少 同时收到4颗以上卫星发射的信号。
设地球上一个点R,同时收到卫星 S1, S2, , S6 发射的信号,
1.画出 f(x) 的略图,从而看出曲线与x 轴交点的位置。 f(x)
x0 a x0 h
x* b
2.从左端点x = a出发,按某个预先选定的步长h 一步一步地向右跨,每跨一步都检验每步起点x0
和终点x0 + h的函数值,若 f (x0 ) f (x0 h) 0
那么所求的根x*必在x0与x0+h之间,这里可取x0或x0+h 作为根的初始近似。
f (x) = 0
(8.2.1)
1.根的存在性。方程有没有根?如果有,有几个根? 2.根的搜索。这些根大致在哪里?如何把根隔离开? 3.根的精确化。
1.根的存在性
定义: 如果存在 x使* 得 f (x*,) 则0 称 为方程x*(8.2.1)
的根或函数 f (x的) 零点。
定理1:设函数 f (x) 在区间[a, b]上连续,如果f (a) f (b) < 0, 则方程 f (x) = 0 在[a, b]内至少有一实根x*。
m重根
若
Hale Waihona Puke f (x) (x x*)m g(x)
其中, g(x*) 0, m 为正整数,则当m=1时,称 x为* 方程(8.2.1)
的单根或函数 f (x的) 单零点。 当m 时2 , 称 x为* 方程(8.2.1)
的 m重根或函数f (x的) m重零点。
2. 根的搜索
(1) 图解法(利用作图软件如 Matlab) (2) 解析法 (3) 近似方程法 (4) 定步长搜索法
计算中,如电路和电力系统计. 算、非线性力学、非线性微( 积分)方程、非线性规划(优化)等众多领域中,问题的求 解和模拟最终往往都要解决求根或优化问题。前一种情形要 求出方程(组)的根;后一种情形则要求找出函数取最大或 最小的点。即使是对实验数据进行拟合或数值求解微分方程, 也总是将问题简化成上述两类问题。上述除少数特殊方程外, 大多数非线性代数方程(组)很难使用解析法求解精确解, 一般需要通过一些数值方法逼近方程的解。这里主要介绍单 个方程的数值解法,方程组也可以采用类似的方法,将放在 后面讨论。
许误差 就可以停止搜索,即
ba 2n
然后取其中点 xn 作为方程的一个根的近似值。
xn
例1 证明方程 ex 10x 2 0 存在唯一的实根 x* (0,1)
用二分法求出此根,要求误差不超过 0.5102 。
解:记 f (x) ex 10x 2 ,则对任意 x R ,
f (x) ex 10 0
第八章
非线性 方程(组)求根
问题驱动:全球定位系统(GPS)
人类对导航和定位的需求是伴随着人类整个文明历史的进 步而发展的,中国古代“四大发明”之一的指南针是最早的定 位仪器和系统,其后还有经纬仪以及近代的雷达。如图8.1.1所 示全球定位系统(GPS)是基于卫星的导航系统,最早由美国 和前苏联分别在80年代研制,并于1993年正式投入使用。现 代社会中全球定位系统越来越深入到人们生活的方方面面。例 如市场上出售的手持型GPS,定位的精度可以达到10米以内, 这无疑给旅行者提供了方便;安装有GPS的儿童手表,家长在 家里的计算机上可以追踪到孩子的位置,防止儿童走 失;安装有GPS系统的汽车可以帮助新司机辨识道路等等。
反复执行步骤2、3,便可得到一系列有根区间:
[a,b] [a1, b1] [a2, b2 ] [an , bn ]
4、当 bk1 ak1 时,停止;
注:
xk 1
1 2
(ak
bk )
即为根的近似。
当 n 时,bn an 0 ,即这些区间必将收缩于一点,也就是 方程的根。在实际计算中,只要[an ,bn ] 的区间长度小于预定容
假设接收的信息如表8.1.1所示。请设法确定R点的位置。
表8.1.1
图8.1.2 卫星分布图
GPS导航问题可归结为求解非线性代数数方程组
F(x) 0 , 当 n 1 时就是单个方程.
f (x) 0
(8.1.1)
其中,f (x) 可以是代数方程,也可以是超越方程。使 f (x) 0 。
成立的x 值称为方程的根,或称为 f (x)的零点。科学与工程
不能保证 x 的精 度
2
x*
x
执行步骤 1.计算f (x)在有解区间[a, b]端点处的值,f (a),f (b)。
2.计算f (x)在区间中点处的值f (x1)。
3.判断若f (x1) = 0,则x1即是根,否则检验: (1)若f (x1)与f (a)异号,则知解位于区间[a, x1], b1=x1, a1=a; (2)若f (x1)与f (a)同号,则知解位于区间[x1, b], a1=x1, b1=b。